JP7375813B2 - 磁気記録媒体及びサーボ信号記録装置 - Google Patents
磁気記録媒体及びサーボ信号記録装置 Download PDFInfo
- Publication number
- JP7375813B2 JP7375813B2 JP2021512009A JP2021512009A JP7375813B2 JP 7375813 B2 JP7375813 B2 JP 7375813B2 JP 2021512009 A JP2021512009 A JP 2021512009A JP 2021512009 A JP2021512009 A JP 2021512009A JP 7375813 B2 JP7375813 B2 JP 7375813B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- recording medium
- servo
- magnetic recording
- servo signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/584—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes
- G11B5/588—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes by controlling the position of the rotating heads
- G11B5/592—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes by controlling the position of the rotating heads using bimorph elements supporting the heads
- G11B5/5921—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes by controlling the position of the rotating heads using bimorph elements supporting the heads using auxiliary signals, e.g. pilot signals
- G11B5/5926—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes by controlling the position of the rotating heads using bimorph elements supporting the heads using auxiliary signals, e.g. pilot signals recorded in separate tracks, e.g. servo tracks
- G11B5/5928—Longitudinal tracks
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/62—Record carriers characterised by the selection of the material
- G11B5/68—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent
- G11B5/70—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent on a base layer
- G11B5/706—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent on a base layer characterised by the composition of the magnetic material
- G11B5/70605—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent on a base layer characterised by the composition of the magnetic material metals or alloys
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/62—Record carriers characterised by the selection of the material
- G11B5/68—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent
- G11B5/70—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent on a base layer
- G11B5/706—Record carriers characterised by the selection of the material comprising one or more layers of magnetisable material homogeneously mixed with a bonding agent on a base layer characterised by the composition of the magnetic material
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/74—Record carriers characterised by the form, e.g. sheet shaped to wrap around a drum
- G11B5/78—Tape carriers
Landscapes
- Engineering & Computer Science (AREA)
- Metallurgy (AREA)
- Magnetic Record Carriers (AREA)
- Manufacturing Of Magnetic Record Carriers (AREA)
- Adjustment Of The Magnetic Head Position Track Following On Tapes (AREA)
- Recording Or Reproducing By Magnetic Means (AREA)
Description
本技術は、サーボ信号が記録された磁気記録媒体及びサーボ信号記録装置に関する。
近年、電子データのバックアップなどの用途で磁気記録媒体が広く利用されている。磁気記録媒体の一つとして、磁気テープが広く普及している。
磁気テープの磁性層には、複数の記録トラックを含むデータバンドが設けられており、この記録トラックに対してデータが記録される。また、磁性層においては、幅方向でデータバンドを挟み込む位置にサーボバンドが設けられ、このサーボバンドにサーボ信号が記録される。磁気ヘッドは、サーボバンドに記録されたサーボ信号を読み取ることで、記録トラックに対して位置合わせを行う(例えば特許文献1参照)。
磁気記録媒体への記録方式としては、磁性層内の磁性粒子を水平方向に磁化させてデータを記録する水平磁気記録方式と、磁性層内の磁性粒子を垂直方向に磁化させてデータを記録する垂直磁気記録方式とが知られている。垂直磁気記録方式は、水平磁気記録方式に比べて高密度にデータを記録することができる。
近年における磁気テープの大容量化に伴い、サーボバンド幅も狭くなることが予想される。例えば、LTOフォーマットの磁気テープには、サーボ信号として、2つの異なる方位角傾斜(azimuthal slope)を含むサーボパターンが記録される。この場合、磁気テープの大容量化に対応するためには、上記方位角傾斜のテープ幅方向に対する傾き角を大きくする必要がある。その結果、サーボ再生ヘッドとのアジマスロスが大きくなるため、サーボ信号の再生出力であるサーボ再生信号のSNR(signal-to-noise ratio)の低下が避けられない。しかも、垂直磁気記録方式においては、磁性層の垂直方向の反磁界の影響を受けてサーボ再生信号のSNRが低下しやすいという問題がある。
以上のような事情に鑑み、本技術の目的は、大容量化に伴うサーボ再生信号の劣化を抑制することができる磁気記録媒体及びサーボ信号記録装置を提供することにある。
本技術の一形態に係る磁気記録媒体は、サーボ信号が記録されるサーボバンドを有する磁性層を具備するテープ状の磁気記録媒体である。
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、Sq×Fact.(p-p)/F0(p-p)で表される指標が0.42以上である。
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、Sq×Fact.(p-p)/F0(p-p)で表される指標が0.42以上である。
本技術では、角形比Sqと、第1の磁気力勾配強度のpeak-to-peak値と第2の磁気力勾配強度のpeak-to-peak値の比との積で表される上記指標に着目し、当該指標を0.42以上とすることで、サーボ信号を比較的高いSNRで再生するようにしている。これにより、大容量化に伴うサーボ再生信号の劣化を抑制することができる。
前記指標は、0.5以上であってもよい。
前記指標は、0.6以上であってもよい。
前記磁性層の垂直方向の角形比(Sq)は、0.45以上であってもよい。
前記磁性層の垂直方向の角形比(Sq)は、0.6以上であってもよい。
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.6以上であってもよい。
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.7以上であってもよい。
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.8以上であってもよい。
前記磁性層の残留磁化(Mrt)は、0.35以上であってもよい。
前記磁性層の残留磁化(Mrt)は、0.45以上であってもよい。
前記サーボ信号は、テープ幅方向に対して所定のアジマス角を持って傾斜する複数のストライプを含むサーボ信号記録パターンであってもよい。
前記磁性層は、六方晶フェライト、ε酸化鉄、又はコバルトフェライトの磁性粉を含んでもよい。
本技術の一形態に係るサーボ信号記録装置は、サーボバンドを有する磁性層を備えたテープ状の磁気記録媒体にサーボ信号を記録する装置であって、サーボライトヘッドと、補助磁極とを具備する。
前記サーボライトヘッドは、前記サーボバンドにサーボ信号を記録する。
前記補助磁極部は、前記磁性層を挟んで前記サーボライトヘッドに対向して配置され、軟磁性材料で構成される。
前記サーボライトヘッドは、前記サーボバンドにサーボ信号を記録する。
前記補助磁極部は、前記磁性層を挟んで前記サーボライトヘッドに対向して配置され、軟磁性材料で構成される。
本技術によれば、大容量化に伴うサーボ再生信号の劣化を抑制することができる。
なお、ここに記載された効果は必ずしも限定されるものではなく、本開示中に記載されたいずれかの効果であってもよい。
なお、ここに記載された効果は必ずしも限定されるものではなく、本開示中に記載されたいずれかの効果であってもよい。
以下、本技術に係る実施形態を、図面を参照しながら説明する。
[磁気記録媒体の構成]
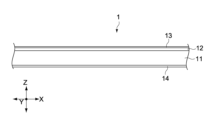
まず、磁気記録媒体における基本的な構成について説明する。図1は、本技術の一実施形態に係る磁気記録媒体1を側方から見た模式図、図2は磁性層側から見た模式図である。
まず、磁気記録媒体における基本的な構成について説明する。図1は、本技術の一実施形態に係る磁気記録媒体1を側方から見た模式図、図2は磁性層側から見た模式図である。
図1及び図2に示すように、磁気記録媒体1は、長手方向(X軸方向)に長く、幅方向(Y軸方向)に短く、厚さ方向(Z軸方向)に薄いテープ状に構成されている。なお、本明細書(及び図面)においては、磁気記録媒体1を基準とした座標系をXYZ座標系で表すこととする。
磁気記録媒体1は、好ましくは96nm以下、より好ましくは75nm以下、さらにより好ましくは60nm以下、特に好ましくは50nm以下の最短記録波長で信号を記録可能に構成されている。磁気記録媒体1は、記録用ヘッドとしてリング型ヘッドを備えるデータ記録装置に用いられることが好ましい。
図1を参照して、磁気記録媒体1は、長手方向(X軸方向)に長いテープ状の基材11と、基材11の一方の主面上に設けられた非磁性層12と、非磁性層12上に設けられた磁性層13と、基材11の他方の主面上に設けられたバック層14とを含む。なお、バック層14は、必要に応じて設けられればよく、このバック層14は省略されてもよい。
磁性層13は、典型的には、垂直記録方式の塗布型磁性媒体が用いられる。なお、磁性層13を含む磁気記録媒体1の詳細については後述する。
[データバンド及びサーボバンド]
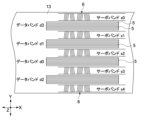
図2は、磁気記録媒体1を上方から見た模式図である。図2を参照して、磁性層13は、データ信号が書き込まれる長手方向(X軸方向)に長い複数のデータバンドd(データバンドd0~d3)と、サーボ信号が書き込まれる長手方向に長い複数のサーボバンドs(サーボバンドs0~s4)とを有している。サーボバンドsは、幅方向(Y軸方向)で各データバンドdを挟み込む位置に配置される。
図2は、磁気記録媒体1を上方から見た模式図である。図2を参照して、磁性層13は、データ信号が書き込まれる長手方向(X軸方向)に長い複数のデータバンドd(データバンドd0~d3)と、サーボ信号が書き込まれる長手方向に長い複数のサーボバンドs(サーボバンドs0~s4)とを有している。サーボバンドsは、幅方向(Y軸方向)で各データバンドdを挟み込む位置に配置される。
本技術において、磁性層13の表面全体の面積に対するサーボバンドsの面積の比率は、典型的には、4.0%以下とされる。なお、サーボバンドsの幅は、典型的には、95μm以下とされる。磁性層13の表面全体の面積に対するサーボバンドsの面積の比率は、例えば、磁気記録媒体1を、フェリコロイド現像液等の現像液を用いて現像し、その後、現像した磁気記録媒体1を光学顕微鏡で観察することで測定することができる。
サーボバンドsは、データバンドdを挟み込む位置に配置されため、サーボバンドsの本数は、データバンドdの本数よりも1本多くなる。図2に示す例では、データバンドdの本数が4本とされ、サーボバンドsの本数が5本とされた場合の例が示されている(既存のシステムにおいては、この方式が採用されることが一般的)。
なお、データバンドdの本数、サーボバンドsの本数は、適宜変更することができ、これらの本数は、増やされてもよい。
この場合、サーボバンドsの数は、好ましくは5以上とされる。サーボバンドsの数が5以上であると、磁気記録媒体1の幅方向の寸法変化によるサーボ信号の読み取り精度への影響を抑制し、オフトラックが少ない安定した記録再生特性を確保できる。
また、データバンドdの本数が、8本、12本、・・(つまり、4n本(nは、2以上の整数))とされ、サーボバンドsの本数が、9本、13本、・・(つまり、4n+1本(nは、2以上の整数))とされてもよい。この場合、既存のシステムを変更することなく、データバンドdの本数、サーボバンドsの本数の変更に対応することができる。
データバンドdは、長手方向に長く、幅方向に整列された複数の記録トラック5を含む。データ信号は、この記録トラック5に沿って、記録トラック5内に記録される。なお、本技術において、データバンドdに記録されるデータ信号における長手方向の1ビット長は、典型的には、48nm以下とされる。サーボバンドsは、サーボ信号記録装置(不図示)によってサーボ信号が記録された所定パターンのサーボ信号記録パターン6を含む。
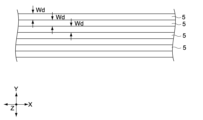
図3は、データバンドdにおける記録トラック5を示す拡大図である。図3に示すように、記録トラック5は、長手方向に長く、幅方向に整列され、また、幅方向でトラック毎に所定の記録トラック幅Wdを有している。この記録トラック幅Wdは、典型的には、2.0μm以下とされる。なお、このような記録トラック幅Wdは、例えば、磁気記録媒体1を、フェリコロイド現像液等の現像液を用いて現像し、その後、現像した磁気記録媒体1を光学顕微鏡で観察することで測定することができる。
1本のデータバンドdに含まれる記録トラック5の本数は、例えば、1000本から2000本程度とされる。
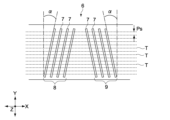
図4は、サーボバンドsにおけるサーボ信号記録パターン6を示す拡大図である。図4に示すように、サーボ信号記録パターン6は、幅方向(Y軸方向)に対して所定のアジマス角αを持って傾斜する複数のストライプ7(方位角傾斜(azimuthal slope))を含む。アジマス角は特に限定されず、サーボバンドsの大きさ等に応じて適宜決定され、例えば、12°である。これ以外にも、アジマス角は、15°、18°、21°、24°などでもよい。
複数のストライプ7は、幅方向(Y軸方向)に対して時計回りに傾斜する第1のストライプ群8と、幅方向に対して反時計回りに傾斜する第2のストライプ群9とに分類される。なお、このようなストライプ7の形状などは、例えば、磁気記録媒体1を、フェリコロイド現像液等の現像液を用いて現像し、その後、現像した磁気記録媒体1を光学顕微鏡で観察することで測定することができる。
図4には、サーボ信号記録パターン6上をサーボリードヘッドによってトレースされるラインであるサーボトレースラインTが破線により示されている。サーボトレースラインTは、長手方向(X軸方向)に沿って設定され、また、幅方向に所定の間隔Psを開けて設定される。
1本のサーボバンドsあたりのサーボトレースラインTの本数は、例えば、30本から200本程度とされる。
隣接する2つのサーボトレースラインTの間隔Psは、記録トラック幅Wdの値と同じであり、例えば、2.0μm以下、あるいは1.5μm以下とされる。ここで、隣接する2つのサーボトレースラインTの間隔Psは、記録トラック幅Wdを決定付ける値とされている。つまり、サーボトレースラインTの間隔Psが狭められると、記録トラック幅Wdが小さくなり、1本のデータバンドdに含まれる記録トラック5の本数が増える。結果として、データの記録容量が増えることになる(間隔Psが広くなる場合は、その逆)。したがって、記録容量の増加を図るには記録トラック幅Wdを小さくする必要があるが、サーボトレースラインTの間隔Psも狭められることになる結果、隣接するサーボトレースラインを正確にトレースすることが困難になる。そこで本実施形態では、後述するように、サーボ信号記録パターン6の読取精度を高めることで、間隔Psの狭小化にも対応可能としている。
[データ記録装置]
次に、磁気記録媒体1に対して、データ信号の記録及び再生を行うデータ記録装置20について説明する。図5は、データ記録装置20を示す模式図である。なお、本明細書(及び図面)においては、データ記録装置20を基準とした座標系をX'Y'Z'座標系で表すこととする。
次に、磁気記録媒体1に対して、データ信号の記録及び再生を行うデータ記録装置20について説明する。図5は、データ記録装置20を示す模式図である。なお、本明細書(及び図面)においては、データ記録装置20を基準とした座標系をX'Y'Z'座標系で表すこととする。
データ記録装置20は、磁気記録媒体1を収容したカートリッジ21を装填可能に構成されている。なお、ここでは、説明を容易にするため、データ記録装置20が1つのカートリッジ21を装填可能な場合について説明するが、データ記録装置20が複数のカートリッジ21を装填可能に構成されていてもよい。また、カートリッジ21の構成の詳細については後述する。
図5に示すように、データ記録装置20は、スピンドル27と、リール22と、スピンドル駆動装置23と、リール駆動装置24と、複数のガイドローラ25と、ヘッドユニット30と、制御装置26とを含む。
スピンドル27は、カートリッジ21を装填可能に構成されている。カートリッジ21は、LTO(Linear Tape Open)規格に準拠しており、巻回された磁気記録媒体1を、ケースの内部において回転可能に収容している。リール22は、カートリッジ21から引き出された磁気記録媒体1の先端側を固定可能に構成されている。
スピンドル駆動装置23は、制御装置26からの指令に応じて、スピンドル27を回転させる。リール駆動装置24は、制御装置26からの指令に応じて、リール22を回転させる。磁気記録媒体1に対してデータ信号の記録/再生が行われるとき、スピンドル駆動装置23及びリール駆動装置24により、スピンドル27及びリール22が回転されて、磁気記録媒体1が走行される。ガイドローラ25は、磁気記録媒体1の走行をガイドするためのローラである。
制御装置26は、例えば、制御部、記憶部、通信部などを含む。制御部は、例えば、CPU(Central Processing Unit)等により構成されており、記憶部に記憶されたプログラムに従い、データ記録装置20の各部を統括的に制御する。
記憶部は、各種のデータや各種のプログラムが記録される不揮発性のメモリと、制御部の作業領域として用いられる揮発性のメモリとを含む。上記各種のプログラムは、光ディスク、半導体メモリ等の可搬性の記録媒体から読み取られてもよいし、ネットワーク上のサーバ装置からダウンロードされてもよい。通信部は、PC(Personal Computer)、サーバ装置等の他の装置との間で互いに通信可能に構成されている。
ヘッドユニット30は、制御装置26からの指令に応じて、磁気記録媒体1に対してデータ信号を記録することが可能に構成されている。また、ヘッドユニット30は、制御装置26からの指令に応じて、磁気記録媒体1に書き込まれたデータを再生することが可能に構成されている。
図6は、ヘッドユニット30を下側から見た図である。図6に示すように、ヘッドユニット30は、第1のヘッドユニット30aと、第2のヘッドユニット30bとを含む。第1のヘッドユニット30aと、第2のヘッドユニット30bとは、X'軸方向(磁気記録媒体1の走行方向)で対称に構成されている。この第1のヘッドユニット30a及び第2のヘッドユニット30bは、幅方向(Y'軸方向)に移動可能に構成されている。
第1のヘッドユニット30aは、磁気記録媒体1が順方向(カートリッジ21側から装置20側に流れる方向)に走行されているときに使用されるヘッドである。一方、第2のヘッドユニット30bは、磁気記録媒体1が逆方向(装置20側からカートリッジ21側に流れる方向)に走行されているときに使用されるヘッドである。
第1のヘッドユニット30a及び第2のヘッドユニット30bは、基本的に同様の構成であるため、第1のヘッドユニット30aについて代表的に説明する。
第1のヘッドユニット30aは、ユニット本体31と、2つのサーボリードヘッド32と、複数のデータライト/リードヘッド33とを有する。
サーボリードヘッド32は、磁気記録媒体1(サーボバンドs)に記録された磁気的情報から発生する磁束をMR素子(MR:Magneto Resistive)などにより読み取ることで、サーボ信号を再生可能に構成されている。つまり、サーボリードヘッド32により、サーボバンドs上に記録されたサーボ信号記録パターン6が読み取られることで、サーボ信号が再生される。サーボリードヘッド32は、ユニット本体31における幅方向(Y'軸方向)の両端側にそれぞれ1つずつ設けられる。2つのサーボリードヘッド32の幅方向(Y'軸方向)における間隔は、磁気記録媒体1における隣接するサーボバンドs間の距離と略同じとされている。
データライト/リードヘッド33は、幅方向(Y軸方向)に沿って、等間隔に配置されている。また、データライト/リードヘッド33は、2つのサーボリードヘッド32に挟み込まれる位置に配置されている。データライト/リードヘッド33の数は、例えば、20個~40個程度とされるが、この個数ついては特に限定されない。
データライト/リードヘッド33は、データライトヘッド34と、データリードヘッド35とを含む。データライトヘッド34は、磁気ギャップから発生する磁界によって、磁気記録媒体1に対してデータ信号を記録することが可能に構成されている。また、データリードヘッド35は、磁気記録媒体1(データバンドd)に記録された磁気的情報から発生する磁界をMR素子(MR:Magneto Resistive)などにより読み取ることで、データ信号を再生可能に構成されている。
第1のヘッドユニット30aにおいては、データライトヘッド34が、データリードヘッド35の左側(磁気記録媒体1が順方向に流れる場合の上流側)に配置される。一方、第2のヘッドユニット30bにおいては、データライトヘッド34が、データリードヘッド35の右側(磁気記録媒体1が逆方向に流れる場合の上流側)に配置される。なお、データリードヘッド35は、データライトヘッド34が磁気記録媒体1にデータ信号を書き込んだ直後に、このデータ信号を再生可能とされている。
図7は、第1のヘッドユニット30aがデータ信号の記録/再生を行っているときの様子を示す図である。なお、図7に示す例では、磁気記録媒体1が順方向(カートリッジ21側から装置20側に流れる方向)に走行されているときの様子が示されている。
図7に示すように、第1のヘッドユニット30aがデータ信号の記録/再生を行うとき、2つのサーボリードヘッド32のうち一方のサーボリードヘッド32は、隣接する2つのサーボバンドsのうち一方のサーボバンドs上に位置し、このサーボバンドs上のサーボ信号を読み取る。
また、2つのサーボリードヘッド32のうち他方のサーボリードヘッド32は、隣接する2つのサーボバンドsのうち他方のサーボバンドs上に位置し、このサーボバンドs上のサーボ信号を読み取る。
また、このとき、制御装置26は、サーボ信号記録パターン6の再生波形に基づいて、サーボリードヘッド32が、目的とするサーボトレースラインT(図4参照)上を正確にトレースしているかどうかを判定する。
この原理について説明する。図4に示すように、サーボ信号記録パターン6における第1のストライプ群8と、第2のストライプ群9とでは、幅方向(Y軸方向)に対して傾斜する方向が逆となっている。このため、上側のサーボトレースラインTでは、第1のストライプ群8と、第2のストライプ群9との間の長手方向(X軸方向)での距離は、相対的に狭くなっている。一方、下側のサーボトレースラインT上では、第1のストライプ群8と、第2のストライプ群9との間の長手方向(X軸方向)での距離は、相対的に広くなっている。
このため、第1のストライプ群8の再生波形が検出された時刻と、第2のストライプ群9の再生波形が検出された時刻との差を求めれば、サーボリードヘッド32が磁気記録媒体1に対して幅方向(Y軸方向)で、現在どの位置に位置するかが分かる。
従って、制御装置26は、サーボ信号の再生波形に基づいて、目的とするサーボトレースラインT上をサーボリードヘッド32が正確にトレースしているかどうかを判定することができる。そして、制御装置26は、目的とするサーボトレースラインT上をサーボリードヘッド32が正確にトレースしていない場合には、ヘッドユニット30を幅方向(Y'軸方向)に移動させて、ヘッドユニット30の位置を調整する。
図7に戻り、データライト/リードヘッド33は、幅方向での位置が調整(ずれた場合)されながら、記録トラック5に沿って、記録トラック5内にデータ信号を記録する。
ここで、磁気記録媒体1がカートリッジ21から全て引き出されると、今度は、逆方向(装置20側からカートリッジ21側に流れる方向)に磁気記録媒体1が走行される。このとき、ヘッドユニット30として、第2のヘッドユニット30bが使用される。
また、このとき、サーボトレースラインTは、先ほどのサーボトレースラインTに隣接するサーボトレースラインTが使用される。この場合、ヘッドユニット30は、幅方向(Y'軸方向)において、サーボトレースラインTの間隔Ps分(=記録トラック幅Wd分)、移動される。
また、この場合、先ほどデータ信号が記録された記録トラック5に隣接する記録トラック5に対して、データ信号が記録される。
このように、磁気記録媒体1は、順方向及び逆方向に走行方向が変えられて何往復もされながら、記録トラック5に対してデータ信号が記録される。
ここで、例えば、サーボトレースラインTの本数が、50本であり、第1のヘッドユニット30a(あるいは、第2のヘッドユニット30b)に含まれるデータライト/リードヘッド33の数が32個の場合を想定する。この場合、1本のデータバンドdに含まれる記録トラック5の本数は、50×32で1600本であり、この記録トラック5すべてにデータ信号を記録するためには、磁気記録媒体1を25往復させる必要がある。
図8は、サーボ信号記録パターン6における2つのストライプ7を示す図である。
図8を参照して、サーボ信号記録パターン6の第1のストライプ群8に含まれる複数のストライプ7のうち、任意のストライプ7を第1のストライプ7aとする。また、サーボ信号記録パターン6の第2のストライプ群9に含まれる複数のストライプ7のうち、任意のストライプ7を第2のストライプ7bとする。
複数のサーボトレースラインTのうち任意のサーボトレースラインTを第1のサーボトレースラインT1とする。また、第1のサーボトレースラインT1に隣接するサーボトレースラインTを第2のサーボトレースラインT2とする。
第1のストライプ7aと、第1のサーボトレースラインT1との交点をP1とする。なお、このP1について、第1のストライプ7a上において、任意の点をP1としてもよい。
第1のストライプ7aと、第2のサーボトレースラインT2との交点をP2とする。なお、このP2について、P1に対して、幅方向(Y軸方向)で間隔Ps分(つまり、記録トラック幅Wd分)、離れた位置にある第1のストライプ7a上の点をP2としてもよい。
P1及びP2における長手方向(X軸方向)での距離を距離Dとする。距離Dは、隣接するトラックとの長手方向のずれ量に相当する。
第2のストライプ7bと、第1のサーボトレースラインT1との交点をP3とし、第2のストライプ7bと、第2のサーボトレースラインT2との交点をP4とする。
第1のサーボトレースラインT1がトレースされているとき、P1において再生波形が検出された時刻と、P3において再生波形が検出された時刻との差を判断する必要がある。この差を第1の期間とする。
同様に、第2のトレースラインTがトレースされているとき、P2において再生波形が検出された時刻と、P4において再生波形が検出された時刻との差を判断する必要がある。この差を第2の期間とする。
次に、第1の期間と、第2の期間との差を考える。ここで、サーボトレースラインTの間隔Ps、及び記録トラック幅Wdが1.56μmであるとし、アジマス角αが12度であるとする。この場合、距離Dは、1.56×tan12°で、0.33μmとなる。P1及びP3の間の距離と、P2及びP4の間の距離との差は、距離Dの2倍なので、0.66μmである。このとき、磁気記録媒体1の走行速度が5m/sであるとすると、0.66/5000000で、0.13μsとなる。これが、第1の期間と、第2の期間との差である。
しかしながら、サーボ信号の再生出力が十分でない場合、このような微小な差を正確に判断することはできない。特に、記録トラック5の本数を増やすために、記録トラック幅Wdを小さくし、サーボトレースラインTの間隔Psを小さくすると、距離Dがさらに狭まり、第1の期間と第2の期間との差がさらに小さくなる。
さらに近年における磁気テープの大容量化に伴い、サーボバンド幅も狭くなることが予想される。この場合、磁気テープの大容量化に対応するためには、上記方位角傾斜のテープ幅方向に対する傾き角を大きくする必要がある。その結果、サーボリードヘッドとのアジマスロスが大きくなるため、サーボ信号の再生出力であるサーボ再生信号のSNR(signal-to-noise ratio)の低下が避けられない。しかも、垂直磁気記録方式においては、磁性層の垂直方向の反磁界の影響を受けてサーボ再生信号のSNRが低下しやすいという問題がある。
[サーボ信号記録装置]
次に、サーボ信号記録装置について説明する。図9は、典型的なサーボ信号記録装置100を示す正面図、図10はその一部を示す部分拡大図である。
次に、サーボ信号記録装置について説明する。図9は、典型的なサーボ信号記録装置100を示す正面図、図10はその一部を示す部分拡大図である。
図9及び図10を参照して、サーボ信号記録装置100は、磁気記録媒体1の搬送方向の上流側から順番に、送り出しローラ111、前処理部112、サーボライトヘッド113、再生ヘッド部114及び巻き取りローラ115を備える。また、サーボ信号記録装置100は、サーボライトヘッド113を駆動する駆動部120及びサーボ信号記録装置100を統括的に制御するコントローラ130を備えている。コントローラ30は、サーボパターン記録装置100の各部を統括的に制御する制御部や、制御部の処理に必要な各種のプログラムやデータが記憶された記録部、データを表示させる表示部、データを入力する入力部などを有する。
送り出しローラ111は、サーボ信号の記録前のロール状の磁気記録媒体1を回転可能に支持することが可能とされている。送り出しローラ111は、モータなどの駆動源の駆動に応じて回転され、回転に応じて磁気記録媒体1を下流側に向けて送り出す。
巻き取りローラ115は、モータなどの駆動源の駆動に応じて送り出しローラ111と同調して回転し、サーボ信号が記録された磁気記録媒体1を回転に応じて巻き取っていく。送り出しローラ111及び巻き取りローラ115は、搬送路内において磁気記録媒体1を一定の速度で移動させることが可能とされている。
サーボライトヘッド113は、例えば、磁気記録媒体1の上方側(磁性層13側)に配置される。なお、サーボライトヘッド113は、磁気記録媒体1の下側(基材11側)に配置されてもよい。サーボライトヘッド113は、矩形波のパルス信号に応じて所定のタイミングで磁界を発生し、磁気記録媒体1が有する磁性層13(前処理後)の一部に対して磁場を印加する。
これにより、サーボライトヘッド113は、第1の方向に磁性層13の一部を磁化させて磁性層13にサーボ信号(以下、サーボ信号記録パターン6ともいう)を記録する(磁化方向は図10中、黒の矢印参照)。サーボライトヘッド113は、サーボライトヘッド113の下側を磁性層13が通過するときに、5つのサーボバンドs0~s4に対してそれぞれサーボ信号記録パターン6を記録することが可能とされている。
サーボ信号記録パターン6の磁化方向である第1の方向は、磁性層13の上面に垂直な垂直方向の成分を含む。すなわち、本実施形態では、垂直配向の磁性粉が磁性層13に含まれるので、磁性層13に記録されるサーボ信号記録パターン6は、垂直方向の磁化成分を含む。
前処理部112は、例えば、サーボライトヘッド113よりも上流側において、磁気記録媒体1の下側(基材11側)に配置される。前処理部112は、磁気記録媒体1の上側(磁性層13側)に配置されてもよい。前処理部112は、Y軸方向(磁気記録媒体1の幅方向)を回転の中心軸として回転可能な永久磁石112aを含む。永久磁石12aの形状は、例えば、円柱形状や、多角柱形状とされるが、これらに限られない。
永久磁石12aは、サーボライトヘッド13によってサーボパターン6が記録される前に、直流磁界によって磁性層4の全体に対して磁場を印加して、磁性層4全体を消磁する。これにより、永久磁石112aは、サーボパターン6の磁化方向とは反対方向の第2の方向に予め磁性層4を磁化させることができる(図10中、白の矢印参照)。このように、2つの磁化方向をそれぞれ反対方向にさせることで、サーボ信号記録パターン6を読み取ることで得られるサーボ信号の再生波形を上下方向(±)で対称とすることができる。
再生ヘッド部114は、サーボライトヘッド113よりも下流側において、磁気記録媒体1の上側(磁性層13側)に配置される。再生ヘッド部114は、前処理部112によって前処理され、かつ、サーボライトヘッド113によってサーボ信号記録パターン6が記録された磁気記録媒体1の磁性層13からサーボ信号記録パターン6を読み取る。典型的には、再生ヘッド部114は、再生ヘッド部114の下側を磁性層13が通過するときに、サーボバンドsの表面から発生する磁束を検出する。このとき検出された磁束がサーボ信号の再生波形となる。
なお、上述のデータ記録装置20のヘッドユニット30におけるサーボリードヘッド32においても同様な原理で磁気記録媒体1に記録されたサーボ信号が再生される。
[サーボ信号の再生出力]
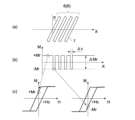
図11は、サーボ信号の再生波形とその出力の大きさを説明する図である。(a)は、磁性層13に記録されたサーボ信号記録パターン6における第1のストライプ群8を示し、(b)は第1のストライプ群7を構成する個々のストライプ7の磁化の大きさを示している。
図11は、サーボ信号の再生波形とその出力の大きさを説明する図である。(a)は、磁性層13に記録されたサーボ信号記録パターン6における第1のストライプ群8を示し、(b)は第1のストライプ群7を構成する個々のストライプ7の磁化の大きさを示している。
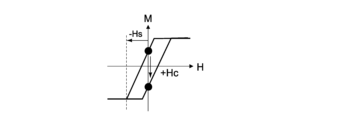
図11(b)に示すように、永久磁石12aによる消磁処理が行われた後の磁性層13の残留磁化のDCレベルの大きさを+Mrとする。サーボライトヘッド113によって磁性層13にサーボ記録パターン6が記録されると、個々のストライプ7に対応する領域の残留磁化Mが、+Mrレベルから-Mrレベルに変化する。+Mrおよび-Mrは、図11(c)に示すように、磁性層13のM-Hカーブ(ヒステリシス)において外部磁界Hがゼロのときにおける残留磁化Mのプラス方向およびマイナス方向の磁化レベルにそれぞれ相当する。図中Hcは、保磁力である。
サーボ信号の再生出力は、サーボ信号記録パターン6の記録前後における磁性層13の残留磁化のレベル差(+Mrと-Mrとの差)に相当するΔMrの絶対値に比例する。つまり、ΔMrが大きいほどサーボ再生信号の再生出力が大きくなり、高SNRとなる。ΔMrの最大化は、サーボ信号記録パターン6を飽和記録させることで実現される。
また、サーボ信号記録パターン6を飽和記録させるのに必要なヘッド磁界として、図12に示すように、磁性層13の磁化が飽和に達する外部磁界(-Hs)を発生させることができる記録電流が、駆動部120からサーボライドヘッド113へ供給される。記録電流の大きさは、磁性層13の磁気特性(残留磁化、角形比、垂直配向度など)によって決定される。
一方、垂直磁気記録方式は磁性層13の垂直方向の反磁界の影響を受けるため、飽和記録に達するヘッド磁界を発生させても、サーボ信号記録パターン6が飽和記録されない場合がある。このため、サーボ信号記録パターン6が適切に書き込まれたかどうかを確認する手法が必要となる。
さらに、磁気テープの大容量化に対応するためには、サーボ信号として記録される各ストライプ7のアジマス角α(図11(a)参照)を大きくする必要がある。その結果、再生ヘッド部114とのアジマスロスが大きくなるため、個々のストライプ7を通過する再生ヘッド部114の距離Δx(図11(b)参照)が長くなる。その結果、再生信号の出力波形が間延びし、平均化処理を含む信号処理の過程で出力レベルが低下する傾向にある。このような観点からも、サーボ信号記録パターン6は飽和記録させる必要性が益々求められる。
そこで本実施形態では、磁性層13に記録されるサーボ信号の磁化レベルを適正に管理するべく、独自の指標を定義して、大容量化に伴うサーボ再生信号の劣化を抑制できる磁気記録媒体を安定に提供できる技術を構築した。
すなわち、本技術においては、磁性層の垂直方向の角形比をSq、磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標(Q)が所定値以上となるように、サーボ信号を記録する。
Sq×Fact.(p-p)/F0(p-p)
で表される指標(Q)が所定値以上となるように、サーボ信号を記録する。
指標(Q)の値は、0.42以上であり、好ましくは0.45以上であり、より好ましくは0.5以上であり、さらに好ましくは0.6以上である。指標(Q)が0.42以上とされることで、後述するように、サーボ再生信号の高SNR化を図ることができる。
磁性層の垂直方向の角形比(Sq)は、磁性層の垂直方向の飽和磁化に対する残留磁化の比をいう。角形比Sは、典型的には、磁性層を構成する磁性粒子の残留磁化(Mrt)、垂直配向度などに依存する。
角形比(Sq)は、0.5以上であることが好ましく、より好ましくは0.6以上、より好ましくは0.65以上、さらにより好ましくは、0.7以上である。これにより、指標(Q)の値の向上を図ることができる。
第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))は、磁性層のサーボバンドにサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される磁気力勾配強度のpeak-to-peak値である。第1の磁気力勾配強度は、サーボ信号が記録時における反磁界による減磁の影響を受けずに記録された理想値に相当する。以下、図13を参照して第1の磁気力勾配強度について説明する。
図13は、第1の磁気力勾配強度の説明図であって、(a)はサーボ信号の一部を構成する1つのストライプ7(図11(a)参照)の記録磁化レベルを、(b)はそのMFM(磁気力顕微鏡)像を、そして、(c)はそのMFM像から観察される磁気力勾配のピーク値をそれぞれ示している。
磁気力顕微鏡(Magnetic Force Microscopy)は、磁性体試料と磁性探針との間の磁気的な相互作用を利用して磁区構造を可視化する装置であって、磁性体試料の磁化状態の解析に用いられる。磁性探針は、ストライプ7に対して垂直となる方向に走査される。サーボ信号が飽和記録された理想的な状態では、図13(b)に示すようにMFM像は磁化の反転部に相当する磁化領域と非磁化領域との2つの境界像が鮮明に表れる。その結果、図13(c)に示すように、上記各境界部における磁気力勾配の2つのピーク値が最大となる。これら2つのピーク間の磁気力勾配の大きさが、第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))と定義される。
一方、第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))は、サーボ信号記録装置100などを用いてサーボバンドに実際に記録されたサーボ信号についての磁気力顕微鏡で観察される磁気力勾配強度のpeak-to-peak値である。第2の磁気力勾配強度は、典型的には、飽和記録されていないサーボ信号についての磁気力顕微鏡で観察される磁気力勾配強度であり、サーボ信号の記録時に反磁界による減磁の影響を受けて、第1の磁気力勾配強度よりも低くなる場合が多い。
図14および図15は、第2の磁気力勾配強度(Fact.(p-p))の説明図であって、(a)はサーボ信号の一部を構成する1つのストライプ7(図11(a)参照)の記録磁化レベルを、(b)はそのMFM(磁気力顕微鏡)像を、そして、(c)はそのMFM像から観察される磁気力勾配のピーク値をそれぞれ示している。
磁性層に書き込まれたサーボ信号は、通常、図14(a)において符号D1で示すように、記録時における磁性層の反磁界による減磁の影響を受けて、サーボ信号の残留磁化(-Mr)が飽和記録時の残留磁化のレベルにまで到達しない。また、図14(b)に示すようにMFM像は、磁化の反転部に相当する2つの境界像がぼやけてしまい、その結果、図14(c)に示すように、上記各境界部における磁気力勾配のピーク値が減少する。これら2つのピーク間の磁気力勾配の大きさ(peak-to-peak値)が、第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))と定義される。
なお、図14(a)~(c)は、サーボ信号記録前の磁性層の残留磁化レベル(消磁レベル)が飽和に達しているときの状態を表している。これに対して図15(a)~(c)は、サーボ信号記録前の磁性層の残留磁化レベル(消磁レベル)が飽和に達していないときの状態を表している。この場合、サーボ信号の記録磁化は、図15(a)に示すように、符号D1で示すようなサーボ記録時の反磁界による減磁の影響だけでなく、符号D2で示すような消磁時の反磁界による減磁の影響を受けることがある。この場合、図15(b),(c)に示すように、MFM像は、磁化の反転部に相当する2つの境界像の周辺に別の像が現れることで、磁気力勾配の波形が崩れることがある。このような場合においては、磁気力勾配の波形において最も高いピーク間の磁気力勾配の大きさ(peak-to-peak値)が、第2の磁気力勾配強度peak-to-peak値(Fact.(p-p))と定義される。
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.6以上であることが好ましく、0.7以上であることがより好ましく、0.8以上であることがさらに好ましい。
[飽和記録用のサーボ信号記録装置]
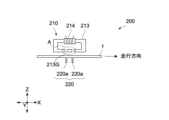
図16、本技術の一実施形態に係るサーボ信号記録装置200の構成を示す部分概略図である。このサーボ信号記録装置200は、サーボ信号を飽和記録させるのに好適な新規の装置である。
図16、本技術の一実施形態に係るサーボ信号記録装置200の構成を示す部分概略図である。このサーボ信号記録装置200は、サーボ信号を飽和記録させるのに好適な新規の装置である。
図16に示すように、サーボ信号記録装置200は、サーボライトヘッド210と、補助磁極220とを備える。これ以外の構成は、図9を参照して説明したサーボ信号記録装置100と同様であるため、その説明は省略する。
サーボライトヘッド210は、磁性コア213と、磁性コア213に巻回されるコイル214とを有する。磁性コア213は、サーボ信号記録用のギャップ部213Gを有する。磁性コア213は、軟磁気特性を有する磁性材料で構成される。コイル214は、駆動部120(図9,10参照)から供給される記録電流を印加されることで、磁性コア213を磁化させる。
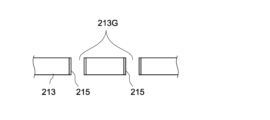
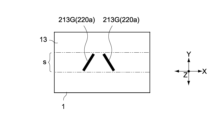
図17は、図16におけるA部の要部拡大図である。図18は、磁気記録媒体1の磁性層13におけるサーボバンドsの一部の領域を示す概略平面図である。
磁性コア213を構成する軟磁性材料は特に限定されず、典型的には、パーマロイ等のFe(鉄)-Ni(ニッケル)系、あるいは、Co(コバルト)系の金属磁性材料が用いられる。あるいは図17に示すように、磁性コア213の本体をパーマロイで構成し、ギャップ部213Fの近傍をCoFe系の高透磁率材料で構成してもよい。CoFe系材料としては、例えば、Co1-xFex(0.6≦x≦0.8)系材料が挙げられる。
ギャップ部213Gは、図18に示すように、「/」形状の溝と「\」形状の溝とを磁気記録媒体1の走行方向に所定間隔をあけて磁性コア213に形成したもので、ギャップ部213Gからの漏れ磁界(ヘッド磁界)でサーボライトヘッド210の直下を走行する磁気記録媒体1の磁性層13を当該各形状に磁化させる。コイル214へ印加される電流は、典型的にはパルス電流であり、その供給タイミングを制御することで、図2あるいは図4に示した一連のストライプ群8,9からなるサーボ信号記録パターン6を形成する。なお、アジマス角αは、ギャップ部213Gを構成する各溝の傾きで調整される。
補助磁極220は、磁気記録媒体1の磁性層13を挟んでサーボライトヘッド210に対向して配置される一対の金属片220aで構成される。各金属片220aは、図18に示すように、磁性コア213のギャップ部213GとZ軸方向に対向するように各々Z軸まわりに傾斜して配置される。補助磁極220は、典型的には、磁気記録媒体1の裏面(支持体11あるいはバック層14)に非接触で配置されるが、ギャップ部213Gとの対向距離は短いほど好ましい。
補助磁極220を構成する各金属片220aは、高透磁率材料で構成され、例えば、上述したCoFe系材料が用いられる。補助磁極220は、そのハンドリング性を高めるため、各金属片220aを共通に支持するベース部(図示略)を備えてもよい。
以上のように構成されるサーボ信号記録装置200においては、サーボライトヘッド210と補助磁極220との間で磁気記録媒体1を走行させながら、磁性層13にサーボ信号が記録される。この際、補助磁極220は、ギャップ部213Gからの漏れ磁界(磁束)が通る磁路を形成する。これにより、ギャップ部213Gからの漏れ磁界が磁気記録媒体1の厚み方向に貫通するように誘導されるため、磁性層13を垂直方向に容易に磁化させることができる。したがって、サーボ信号記録装置200によれば、以下の理由で、サーボ信号を飽和記録あるいはこれに近い状態で記録することができる。
垂直配向膜に飽和記録を行う場合には、反磁界(4πMs)の影響により、Hs=Hc+4πMsを超える記録磁界を印加する必要がある。例えば、保磁力Hcが3000Oe、飽和磁化Msが300emu/cm3(一般的な垂直配向バリウムフェライトの値)の場合、Hs=Hc+4πMs=6768Oe で、Hcの2倍以上の記録磁界が必要となる。更に、飽和記録を行うためには、Hsの3倍以上の記録ヘッドのギャップ中磁界が必要と一般に言われている。従って、記録ヘッドの材料が、現在の磁気テープドライブにてよく使用されているNi45Fe55である場合、 ギャップ中磁界は16000Oe程度となり、Hs=6768Oeのメディアの飽和記録は困難となる。
しかしながら、補助磁極220を設けた場合、磁性膜表面に誘起される面磁化が抑制され、4πMsの反磁界が打ち消される効果が得られるため、Hs=Hcとなり、飽和記録ができるようになる、と考えられる。
しかしながら、補助磁極220を設けた場合、磁性膜表面に誘起される面磁化が抑制され、4πMsの反磁界が打ち消される効果が得られるため、Hs=Hcとなり、飽和記録ができるようになる、と考えられる。
次に、本技術における各種実施例及び各種比較例について説明する。
(実施例1)
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.55memu/cm2、垂直方向の角形比(Sq)が0.7(70%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極(CoFe系、以下同じ)を備えた第1のサーボ信号記録装置(図16参照)を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ(Ni45Fe55)製とし、記録信号は記録電流100%のステップ信号とした。記録電流100%とは、記録電流を変化させて再生信号電圧をモニターした際に、再生信号電圧が最大となる記録電流値をいう。
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.55memu/cm2、垂直方向の角形比(Sq)が0.7(70%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極(CoFe系、以下同じ)を備えた第1のサーボ信号記録装置(図16参照)を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ(Ni45Fe55)製とし、記録信号は記録電流100%のステップ信号とした。記録電流100%とは、記録電流を変化させて再生信号電圧をモニターした際に、再生信号電圧が最大となる記録電流値をいう。
上述の方法で記録されたサーボ信号は、上述した補助磁極の作用により、磁性層に飽和記録されたものとみなすことができる。そこで本実施例では、当該サーボ信号が記録された磁性層のMFM像から得られる磁気力勾配強度のpeak-to-peak値を、サーボ信号を飽和記録させたときに得られる第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))とした。
次に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、上記磁気記録媒体を5m/sでテープ長手方向に走行させながら、記録電流100%のステップ信号をサーボライトヘッドに印加することで、アジマス角12°のサーボ信号を記録した。第2のサーボ信号記録装置は、補助磁極がないこと以外は上記第1のサーボ信号記録装置と同一の構成を有する。
そして、上記条件でサーボ信号が記録された磁性層のMFM像を取得し、得られたMFM像から、当該サーボ信号の磁気力勾配強度である第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))を測定した。
なお、F0(p-p)及びFact.(p-p)の測定には、ブルカー社製磁気力顕微鏡「NanoScope III A D3100」を用いた。
測定条件を下記に示す。
測定モード:Phase Mode
走査速度: 1.0Hz
データ点数:512×512
また、プローブは、ナノワールド社製MFMR を用いた。
測定条件を下記に示す。
測定モード:Phase Mode
走査速度: 1.0Hz
データ点数:512×512
また、プローブは、ナノワールド社製MFMR を用いた。
続いて、測定されたFact.(p-p)の値から、F0(p-p)に対するFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.7であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.49であった。
次に、Fact.(p-p)の測定に用いた磁気記録媒体のサーボ信号を再生し、そのSNRを測定した。測定には、サーボ信号記録装置に備え付けられた再生ヘッド部の信号を用いた。測定値は、市販されているLTO7フォーマットの磁気テープのサーボ再生信号のSNRを0dBとしたときの相対値とした。測定の結果、SNRは、2.0dBであった。
(実施例2)
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を90%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を90%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1で測定されたF0(p-p)に対する当該サーボ信号のFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.65であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.455であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、1.0dBであった。
(実施例3)
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を80%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該サーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を80%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該サーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1で測定されたF0(p-p)に対する当該サーボ信号のFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.6であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.42であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、0.0dBであった。
(実施例4)
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.45memu/cm2、垂直方向の角形比(Sq)が0.6(60%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.45memu/cm2、垂直方向の角形比(Sq)が0.6(60%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
上述の方法で記録されたサーボ信号は、上述した補助磁極の作用により、磁性層に飽和記録されたものとみなすことができる。そこで本実施例では、当該サーボ信号が記録された磁性層のMFM像から得られる磁気力勾配強度のpeak-to-peak値を、サーボ信号を飽和記録させたときに得られる第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))とした。
次に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、上記磁気記録媒体を5m/sでテープ長手方向に走行させながら、記録電流100%のステップ信号をサーボライトヘッドに印加することで、アジマス角12°のサーボ信号を記録した。
そして、上記条件でサーボ信号が記録された磁性層のMFM像を取得し、得られたMFM像から、当該サーボ信号の磁気力勾配強度である第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))を測定した。
続いて、測定されたFact.(p-p)の値から、F0(p-p)に対するFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.7であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.42であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、0.0dBであった。
(実施例5)
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.39memu/cm2、垂直方向の角形比(Sq)が0.5(50%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.39memu/cm2、垂直方向の角形比(Sq)が0.5(50%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
上述の方法で記録されたサーボ信号は、上述した補助磁極の作用により、磁性層に飽和記録されたものとみなすことができる。そこで本実施例では、当該サーボ信号が記録された磁性層のMFM像から得られる磁気力勾配強度のpeak-to-peak値を、サーボ信号を飽和記録させたときに得られる第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))とした。
次に、補助磁極を備えた第1のサーボ信号記録装置を用いて、上記磁気記録媒体を5m/sでテープ長手方向に走行させながら、記録電流90%のステップ信号をサーボライトヘッドに印加することで、アジマス角12°のサーボ信号を記録した。
そして、上記条件でサーボ信号が記録された磁性層のMFM像を取得し、得られたMFM像から、当該サーボ信号の磁気力勾配強度である第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))を測定した。
続いて、測定されたFact.(p-p)の値から、F0(p-p)に対するFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.9であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.45であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、0.8dBであった。
(比較例1)
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を70%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を70%とした以外は実施例1と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例1で測定されたF0(p-p)に対する当該サーボ信号のFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.5であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.35であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、-2.0dBであった。
(比較例2)
実施例5と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えた第1のサーボ信号記録装置を用いて、記録電流を80%とした以外は実施例5と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例5と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えた第1のサーボ信号記録装置を用いて、記録電流を80%とした以外は実施例5と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例5で測定されたF0(p-p)に対する当該サーボ信号のFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.8であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.4であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、-0.5dBであった。
(比較例3)
実施例5と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を100%とした以外は実施例5と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例5と同一の材料で作製された磁気記録媒体の磁性層に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、記録電流を100%とした以外は実施例5と同一の条件でサーボ信号を記録した。記録されたサーボ信号のMFM像を取得し、そのMFM像から、当該サーボ信号の磁気力勾配強度のpeak-to-peak値を測定し、それを当該磁気記録媒体におけるサーボ信号の第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))とした。
実施例5で測定されたF0(p-p)に対する当該サーボ信号のFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.7であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.35であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、-2.0dBであった。
(比較例4)
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.35memu/cm2、垂直方向の角形比(Sq)が0.45(45%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
磁性粉としてバリウムフェライトを含有し、残留磁化(Mrt)が0.35memu/cm2、垂直方向の角形比(Sq)が0.45(45%)である厚み80nmの磁性層を有する磁気記録媒体を作製した。作製した磁気記録媒体を5m/sで走行させながら、補助磁極を備えた第1のサーボ信号記録装置を用いて、磁性層にアジマス角12°のサーボ信号記録パターンからなるサーボ信号を記録した。サーボライトヘッドはパーマロイ製とし、記録信号は記録電流100%のステップ信号とした。
上述の方法で記録されたサーボ信号は、上述した補助磁極の作用により、磁性層に飽和記録されたものとみなすことができる。そこで本実施例では、当該サーボ信号が記録された磁性層のMFM像から得られる磁気力勾配強度のpeak-to-peak値を、サーボ信号を飽和記録させたときに得られる第1の磁気力勾配強度のpeak-to-peak値(F0(p-p))とした。
次に、補助磁極を備えていない第2のサーボ信号記録装置を用いて、上記磁気記録媒体を5m/sでテープ長手方向に走行させながら、記録電流100%のステップ信号をサーボライトヘッドに印加することで、アジマス角12°のサーボ信号を記録した。
そして、上記条件でサーボ信号が記録された磁性層のMFM像を取得し、得られたMFM像から、当該サーボ信号の磁気力勾配強度である第2の磁気力勾配強度のpeak-to-peak値(Fact.(p-p))を測定した。
続いて、測定されたFact.(p-p)の値から、F0(p-p)に対するFact.(p-p)の比率であるFact.(p-p)/F0(p-p)を算出したところ、その値は0.7であり、当該比率と磁性層の角形比(Sq)との積である指標(Q)の値は、0.315であった。さらに実施例1と同一の条件で当該サーボ信号を再生してSNRを測定したところ、-2.5dBであった。
実施例1~5及び比較例1~3の条件及び結果を表1にまとめて示す。
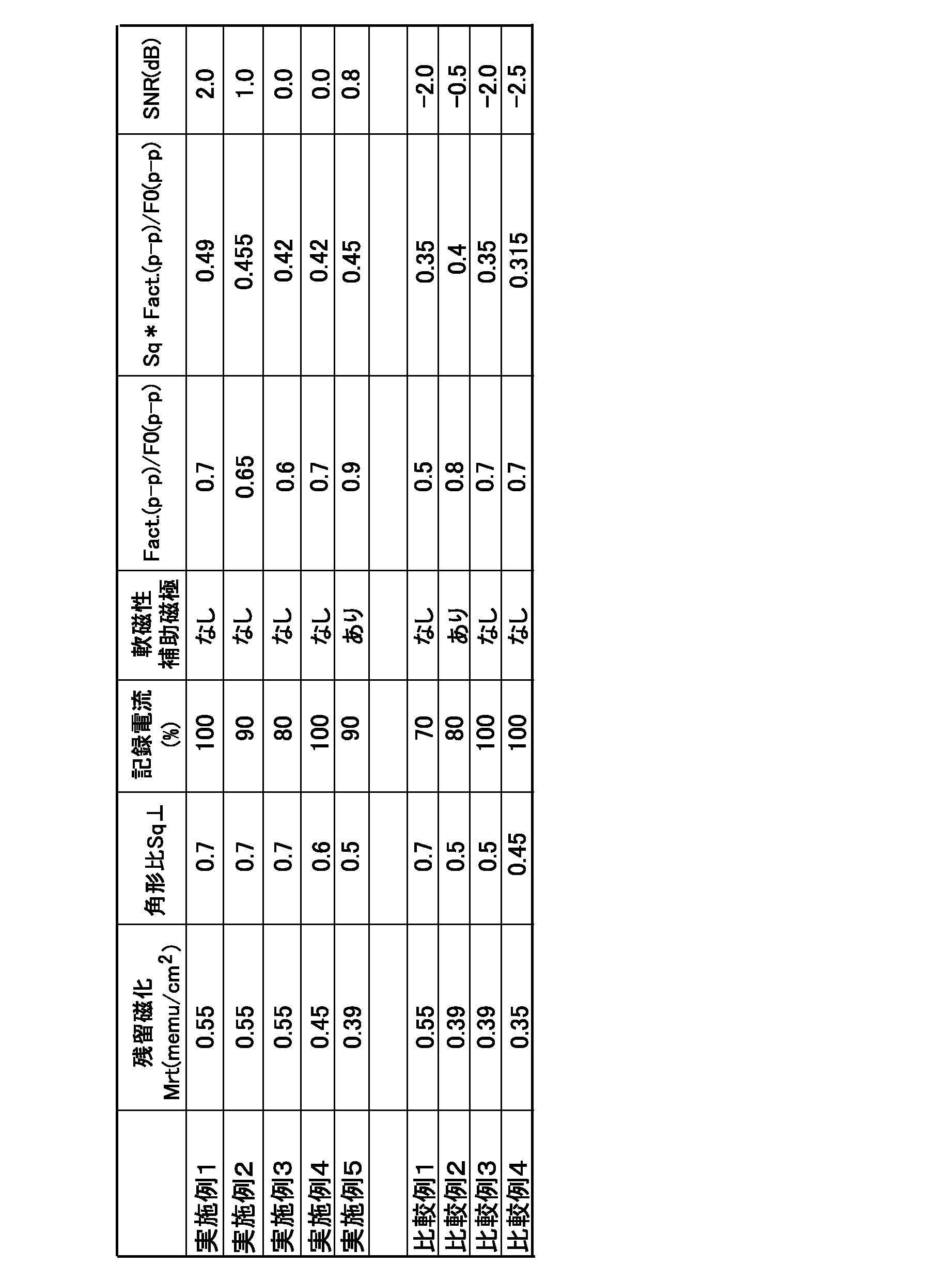
表1に示すように、磁性層の垂直方向角形比(Sq)とサーボ信号の磁気力勾配強度の比率(Fact.(p-p)/F0(p-p))との積である指標Qの値が0.42以上である実施例1~5でのサーボ再生信号のSNRは、いずれも0dB以上であり、LTO7に採用されている磁気記録媒体のサーボ再生信号のSNRと比較して同等以上の結果が得られた。図19に、当該SNRと指標Qとの関係を示す。
特に、指標Qの値が0.45(小数第2位を四捨五入した値)以上である実施例1、2、5においては、0.8dB以上のSNRが得られることから、磁気記録媒体の高容量化に伴うサーボ信号のアジマス角の増加に対しても良好なSNRを確保できると期待される。
さらに、サーボ信号の記録に補助磁極を備えた第1のサーボ信号記録装置を採用することで、補助磁極を備えていない第2のサーボ信号記録装置を採用する場合と比較して、指標Qを高くすることができる。これは、補助磁極による磁束の誘導作用によって磁性層の垂直方向への磁化率がより一層高まった結果、サーボ信号の飽和磁化あるいはこれに近い状態が実現し、指標Qの増加につながったものと考えられる。
以上のように、磁性層の垂直方向角形比(Sq)とサーボ信号の磁気力勾配強度の比率(Fact.(p-p)/F0(p-p))との積である指標Qを参照することで、磁気記録媒体のサーボ信号の磁化状態やその再生信号のSNRを推定することができる。これにより、磁気記録媒体の管理が容易となり、サーボ再生信号の高SNR化を実現可能な磁気記録媒体を提供することができる。また、磁気記録媒体の大容量化によるサーボ再生信号のSNRの劣化を抑制することができる。
<磁気記録媒体の詳細>
続いて、磁気記録媒体1の詳細について説明する。
続いて、磁気記録媒体1の詳細について説明する。
[基材]
基材11は、非磁性層12および磁性層13を支持する非磁性支持体である。基材11は、長尺のフィルム状を有する。基材11の平均厚みの上限値は、4.0μm、好ましくは4.2μm、より好ましくは3.8μm、さらにより好ましくは3.4μmである。基材11の平均厚みの上限値が4.2μm以下であると、1つのカートリッジ21(図5参照)内に記録できる記録容量を一般的な磁気記録媒体よりも高めることができる。
基材11は、非磁性層12および磁性層13を支持する非磁性支持体である。基材11は、長尺のフィルム状を有する。基材11の平均厚みの上限値は、4.0μm、好ましくは4.2μm、より好ましくは3.8μm、さらにより好ましくは3.4μmである。基材11の平均厚みの上限値が4.2μm以下であると、1つのカートリッジ21(図5参照)内に記録できる記録容量を一般的な磁気記録媒体よりも高めることができる。
基材11の平均厚みは以下のようにして求められる。まず、1/2インチ幅の磁気記録媒体1を準備し、それを250mmの長さに切り出し、サンプルを作製する。続いて、サンプルの基材11以外の層(すなわち非磁性層12、磁性層13およびバック層14)をMEK(メチルエチルケトン)または希塩酸等の溶剤で除去する。次に、測定装置としてMitutoyo社製レーザーホロゲージを用いて、サンプル(基材11)の厚みを5点以上の位置で測定し、それらの測定値を単純に平均(算術平均)して、基材11の平均厚みを算出する。なお、測定位置は、サンプルから無作為に選ばれるものとする。
基材11は、例えば、ポリエステル類、ポリオレフィン類、セルロース誘導体、ビニル系樹脂、およびその他の高分子樹脂のうちの少なくとも1種を含む。基材11が上記材料のうちの2種以上を含む場合、それらの2種以上の材料は混合されていてもよいし、共重合されていてもよいし、積層されていてもよい。
ポリエステル類は、例えば、PET(ポリエチレンテレフタレート)、PEN(ポリエチレンナフタレート)、PBT(ポリブチレンテレフタレート)、PBN(ポリブチレンナフタレート)、PCT(ポリシクロヘキシレンジメチレンテレフタレート)、PEB(ポリエチレン-p-オキシベンゾエート)およびポリエチレンビスフェノキシカルボキシレートのうちの少なくとも1種を含む。
ポリオレフィン類は、例えば、PE(ポリエチレン)およびPP(ポリプロピレン)のうちの少なくとも1種を含む。セルロース誘導体は、例えば、セルロースジアセテート、セルローストリアセテート、CAB(セルロースアセテートブチレート)およびCAP(セルロースアセテートプロピオネート)のうちの少なくとも1種を含む。ビニル系樹脂は、例えば、PVC(ポリ塩化ビニル)およびPVDC(ポリ塩化ビニリデン)のうちの少なくとも1種を含む。
その他の高分子樹脂は、例えば、PA(ポリアミド、ナイロン)、芳香族PA(芳香族ポリアミド、アラミド)、PI(ポリイミド)、芳香族PI(芳香族ポリイミド)、PAI(ポリアミドイミド)、芳香族PAI(芳香族ポリアミドイミド)、PBO(ポリベンゾオキサゾール、例えばザイロン(登録商標))、ポリエーテル、PEK(ポリエーテルケトン)、PEEK(ポリエーテルエーテルケトン)、ポリエーテルエステル、PES(ポリエーテルサルフォン)、PEI(ポリエーテルイミド)、PSF(ポリスルフォン)、PPS(ポリフェニレンスルフィド)、PC(ポリカーボネート)、PAR(ポリアリレート)およびPU(ポリウレタン)のうちの少なくとも1種を含む。
[磁性層]
磁性層13は、データ信号を記録するための記録層である。磁性粉、結着剤、導電性粒子等を含む。磁性層13は、必要に応じて、潤滑剤、研磨剤、防錆剤などの添加剤をさらに含んでいてもよい。磁性層13は、多数の孔部が設けられた表面を有している。これらの多数の孔部には、潤滑剤が蓄えられている。多数の孔部は、磁性層の表面に対して垂直方向に延設されていることが好ましい。
磁性層13は、データ信号を記録するための記録層である。磁性粉、結着剤、導電性粒子等を含む。磁性層13は、必要に応じて、潤滑剤、研磨剤、防錆剤などの添加剤をさらに含んでいてもよい。磁性層13は、多数の孔部が設けられた表面を有している。これらの多数の孔部には、潤滑剤が蓄えられている。多数の孔部は、磁性層の表面に対して垂直方向に延設されていることが好ましい。
磁性層13の厚さは、典型的には、35nm以上90nm以下とされる。このように、磁性層13の厚さを35nm以上90nm以下とすることで、電磁変換特性を向上させることができる。さらに、サーボ信号の再生波形における孤立波形の半値幅の観点からすると、磁性層13の厚さは、好ましくは90nm以下、より好ましくは80nm以下、より好ましくは60nm以下、より好ましくは50nm以下、さらにより好ましくは40nm以下とされる。磁性層13の厚さが90nm以下とされることで、サーボ信号の再生波形における孤立波形の半値幅を狭くして(195nm以下)、サーボ信号の再生波形のピークを鋭くすることができる。これにより、サーボ信号の読み取り精度が向上するため、記録トラック数を増加させてデータの記録密度を向上させることができる。
磁性層13の厚さは、例えば、以下の様にして求めることができる。まず、磁気記録媒体1を、その主面に対して垂直に薄く加工して試料片を作製し、その試験片の断面を透過型電子顕微鏡(Transmission Electron Microscope:TEM)により、下記の条件で観察を行う。
装置:TEM(日立製作所製H9000NAR)
加速電圧:300kV
倍率:100,000倍
装置:TEM(日立製作所製H9000NAR)
加速電圧:300kV
倍率:100,000倍
次に、得られたTEM像を用い、磁気記録媒体10の長手方向で少なくとも10点以上の位置で磁性層13の厚さを測定した後、それらの測定値を単純に平均(算術平均)して磁性層13の厚さとする。なお、測定位置は、試験片から無作為に選ばれるものとする。
(磁性粉)
磁性粉は、ε酸化鉄を含有するナノ粒子(以下「ε酸化鉄粒子」という。)の粉末を含む。ε酸化鉄粒子は微粒子でも高保磁力を得ることができる。ε酸化鉄粒子に含まれるε酸化鉄は、磁気記録媒体1の厚み方向(垂直方向)に優先的に結晶配向していることが好ましい。
磁性粉は、ε酸化鉄を含有するナノ粒子(以下「ε酸化鉄粒子」という。)の粉末を含む。ε酸化鉄粒子は微粒子でも高保磁力を得ることができる。ε酸化鉄粒子に含まれるε酸化鉄は、磁気記録媒体1の厚み方向(垂直方向)に優先的に結晶配向していることが好ましい。
ε酸化鉄粒子は、球状もしくはほぼ球状を有しているか、または立方体状もしくはほぼ立方体状を有している。ε酸化鉄粒子が上記のような形状を有しているため、磁性粒子としてε酸化鉄粒子を用いた場合、磁性粒子として六角板状のバリウムフェライト粒子を用いた場合に比べて、磁気記録媒体1の厚み方向における粒子同士の接触面積を低減し、粒子同士の凝集を抑制することができる。したがって、磁性粉の分散性を高め、より良好なSNR(Signal-to-Noise Ratio)を得ることができる。
ε酸化鉄粒子は、コアシェル型構造を有する。具体的には、ε酸化鉄粒子は、コア部と、このコア部の周囲に設けられた2層構造のシェル部とを備える。2層構造のシェル部は、コア部上に設けられた第1シェル部と、第1シェル部上に設けられた第2シェル部とを備える。
コア部は、ε酸化鉄を含む。コア部に含まれるε酸化鉄は、ε-Fe2O3結晶を主相とするものが好ましく、単相のε-Fe2O3からなるものがより好ましい。
第1シェル部は、コア部の周囲のうちの少なくとも一部を覆っている。具体的には、第1シェル部は、コア部の周囲を部分的に覆っていてもよいし、コア部の周囲全体を覆っていてもよい。コア部と第1シェル部の交換結合を十分なものとし、磁気特性を向上する観点からすると、コア部21の表面全体を覆っていることが好ましい。
第1シェル部は、いわゆる軟磁性層であり、例えば、α-Fe、Ni-Fe合金またはFe-Si-Al合金等の軟磁性体を含む。α-Feは、コア部21に含まれるε酸化鉄を還元することにより得られるものであってもよい。
第2シェル部は、酸化防止層としての酸化被膜である。第2シェル部は、α酸化鉄、酸化アルミニウムまたは酸化ケイ素を含む。α酸化鉄は、例えばFe3O4、Fe2O3およびFeOのうちの少なくとも1種の酸化鉄を含む。第1シェル部がα-Fe(軟磁性体)を含む場合には、α酸化鉄は、第1シェル部22aに含まれるα-Feを酸化することにより得られるものであってもよい。
ε酸化鉄粒子が、上述のように第1シェル部を有することで、熱安定性を確保するためにコア部単体の保磁力Hcを大きな値に保ちつつ、ε酸化鉄粒子(コアシェル粒子)全体としての保磁力Hcを記録に適した保磁力Hcに調整できる。また、ε酸化鉄粒子が、上述のように第2シェル部を有することで、磁気記録媒体の製造工程およびその工程前において、ε酸化鉄粒子が空気中に暴露されて、粒子表面に錆び等が発生することにより、ε酸化鉄粒子の特性が低下することを抑制することができる。したがって、磁気記録媒体1の特性劣化を抑制することができる。
磁性粉の平均粒子サイズ(平均最大粒子サイズ)は、好ましくは22nm以下、より好ましくは8nm以上22nm以下、さらにより好ましくは12nm以上22nm以下である。
磁性粉の平均アスペクト比が、好ましくは1以上2.5以下、より好ましくは1以上2.1以下、さらにより好ましくは1以上1.8以下である。磁性粉の平均アスペクト比が1以上2.5以下の範囲内であると、磁性粉の凝集を抑制することができ、また、磁性層13の形成工程において磁性粉を垂直配向させる際に、磁性粉に加わる抵抗を抑制することができる。したがって、磁性粉の垂直配向性を向上させることができる。
磁性粉の平均体積Vave(粒子体積)は、好ましくは2300nm3以下、より好ましくは2200nm3以下、より好ましくは2100nm3以下、より好ましくは1950nm3以下、より好ましくは1600nm3以下、さらにより好ましくは1300nm3以下である。磁性粉の平均体積Vaveが2300nm3以下であると、サーボ信号の再生波形における孤立波形の半値幅を狭くして(195nm以下)、サーボ信号の再生波形のピークを鋭くすることができる。これにより、サーボ信号の読み取り精度が向上するため、記録トラック数を増加させてデータの記録密度を向上させることができる(詳細は後述)。なお、磁性粉の平均体積Vaveは、小さければ小さいほど良いので体積の下限値については特に限定されないが、例えば、下限値は、1000nm3以上とされる。
上記の磁性粉の平均粒子サイズ、平均アスペクト比及び平均体積Vaveは、以下のようにして求められる(例えば、磁性粉がε酸化鉄粒子のような球体等の形状を有している場合)。まず、測定対象となる磁気記録媒体1をFIB(Focused Ion Beam)法等により加工して薄片を作製し、TEMにより薄片の断面観察を行う。次に、撮影したTEM写真から50個の磁性粉を無作為に選び出し、各磁性粉の長軸長DLと短軸長DSを測定する。ここで、長軸長DLとは、磁性粉の輪郭に接するように、あらゆる角度から引いた2本の平行線間の距離のうち最大のもの(いわゆる最大フェレ径)を意味する。一方、短軸長DSとは、磁性粉の長軸と直交する方向における磁性粉の長さのうち最大のものを意味する。
続いて、測定した50個の磁性粉の長軸長DLを単純に平均(算術平均)して平均長軸長DLaveを求める。そして、このようにして求めた平均長軸長DLaveを磁性粉の平均粒子サイズとする。また、測定した50個の磁性粉の短軸長DSを単純に平均(算術平均)して平均短軸長DSaveを求める。次に、平均長軸長DLaveおよび平均短軸長DSaveから磁性粉の平均アスペクト比(DLave/DSave)を求める。
次に、平均長軸長DLaveを用いて以下の式から磁性粉の平均体積Vave(粒子体積)を求める。
Vave=π/6×DLave3
Vave=π/6×DLave3
ここでの説明では、ε酸化鉄粒子が2層構造のシェル部を有している場合について説明したが、ε酸化鉄粒子が単層構造のシェル部を有していてもよい。この場合、シェル部は、第1シェル部と同様の構成を有する。但し、ε酸化鉄粒子の特性劣化を抑制する観点からすると、上述したように、ε酸化鉄粒子が2層構造のシェル部を有していることが好ましい。
以上の説明では、ε酸化鉄粒子がコアシェル構造を有している場合について説明したが、ε酸化鉄粒子が、コアシェル構造に代えて添加剤を含んでいてもよいし、コアシェル構造を有すると共に添加剤を含んでいてもよい。この場合、ε酸化鉄粒子のFeの一部が添加剤で置換される。ε酸化鉄粒子が添加剤を含むことによっても、ε酸化鉄粒子全体としての保磁力Hcを記録に適した保磁力Hcに調整できるため、記録容易性を向上することができる。添加剤は、鉄以外の金属元素、好ましくは3価の金属元素、より好ましくはAl、GaおよびInのうちの少なくとも1種、さらにより好ましくはAlおよびGaのうちの少なくとも1種である。
具体的には、添加剤を含むε酸化鉄は、ε-Fe2-xMxO3結晶(但し、Mは鉄以外の金属元素、好ましくは3価の金属元素、より好ましくはAl、GaおよびInのうちの少なくとも1種、さらにより好ましくはAlおよびGaのうちの少なくとも1種である。xは、例えば0<x<1である。)である。
磁性粉は、六方晶フェライトを含有するナノ粒子(以下「六方晶フェライト粒子」という。)の粉末を含んでいてもよい。六方晶フェライト粒子は、例えば、六角板状またはほぼ六角板状を有する。六方晶フェライトは、好ましくはBa、Sr、PbおよびCaのうちの少なくとも1種、より好ましくはBaおよびSrのうちの少なくとも1種を含む。六方晶フェライトは、具体的には例えばバリウムフェライトまたはストロンチウムフェライトであってもよい。バリウムフェライトは、Ba以外にSr、PbおよびCaのうちの少なくとも1種をさらに含んでいてもよい。ストロンチウムフェライトは、Sr以外にBa、PbおよびCaのうちの少なくとも1種をさらに含んでいてもよい。
より具体的には、六方晶フェライトは、一般式MFe12O19で表される平均組成を有する。但し、Mは、例えばBa、Sr、PbおよびCaのうちの少なくとも1種の金属、好ましくはBaおよびSrのうちの少なくとも1種の金属である。Mが、Baと、Sr、PbおよびCaからなる群より選ばれる1種以上の金属との組み合わせであってもよい。また、Mが、Srと、Ba、PbおよびCaからなる群より選ばれる1種以上の金属との組み合わせであってもよい。上記一般式においてFeの一部が他の金属元素で置換されていてもよい。
磁性粉が六方晶フェライト粒子の粉末を含む場合、磁性粉の平均粒子サイズは、好ましくは50nm以下、より好ましくは10nm以上40nm以下、さらにより好ましくは15nm以上30nm以下である。磁性粉が六方晶フェライト粒子の粉末を含む場合、磁性粉の平均アスペクト比及び磁性粉の平均体積Vaveは上述したとおりである。
なお、磁性粉の平均粒子サイズ、平均アスペクト比および平均体積Vaveは以下のようにして求められる(例えば、磁性粉が六方晶フェライトのような板状の形状を有している場合)。まず、測定対象となる磁気記録媒体1をFIB法等により加工して薄片を作製し、TEMにより薄片の断面観察を行う。次に、撮影したTEM写真から、水平方向に対して75度以上の角度で配向した磁性粉を50個無作為に選び出し、各磁性粉の最大板厚DAを測定する。続いて、測定した50個の磁性粉の最大板厚DAを単純に平均(算術平均)して平均最大板厚DAaveを求める。
次に、磁気記録媒体1の磁性層13の表面をTEMにより観察を行う。次に、撮影したTEM写真から50個の磁性粉を無作為に選び出し、各磁性粉の最大板径DBを測定する。ここで、最大板径DBとは、磁性粉の輪郭に接するように、あらゆる角度から引いた2本の平行線間の距離のうち最大のもの(いわゆる最大フェレ径)を意味する。続いて、測定した50個の磁性粉の最大板径DBを単純に平均(算術平均)して平均最大板径DBaveを求める。そして、このようにして求めた平均最大板径DBaveを磁性粉の平均粒子サイズとする。次に、平均最大板厚DAaveおよび平均最大板径DBaveから磁性粉の平均アスペクト比(DBave/DAave)を求める。
次に、平均最大板厚DAaveおよび平均最大板径DBaveを用いて以下の式から磁性粉の平均体積Vave(粒子体積)を求める。

磁性粉は、Co含有スピネルフェライトを含有するナノ粒子(以下「コバルトフェライト粒子」という。)の粉末を含んでいてもよい。コバルトフェライト粒子は、一軸異方性を有することが好ましい。コバルトフェライト粒子は、例えば、立方体状またはほぼ立方体状を有している。Co含有スピネルフェライトが、Co以外にNi、Mn、Al、CuおよびZnのうちの少なくとも1種をさらに含んでいてもよい。
Co含有スピネルフェライトは、例えば以下の式(1)で表される平均組成を有する。
CoxMyFe2OZ ・・・(1)
(但し、式(1)中、Mは、例えば、Ni、Mn、Al、CuおよびZnのうちの少なくとも1種の金属である。xは、0.4≦x≦1.0の範囲内の値である。yは、0≦y≦0.3の範囲内の値である。但し、x、yは(x+y)≦1.0の関係を満たす。zは3≦z≦4の範囲内の値である。Feの一部が他の金属元素で置換されていてもよい。)
CoxMyFe2OZ ・・・(1)
(但し、式(1)中、Mは、例えば、Ni、Mn、Al、CuおよびZnのうちの少なくとも1種の金属である。xは、0.4≦x≦1.0の範囲内の値である。yは、0≦y≦0.3の範囲内の値である。但し、x、yは(x+y)≦1.0の関係を満たす。zは3≦z≦4の範囲内の値である。Feの一部が他の金属元素で置換されていてもよい。)
磁性粉がコバルトフェライト粒子の粉末を含む場合、磁性粉の平均粒子サイズは、好ましくは25nm以下、より好ましくは23nm以下である。磁性粉がコバルトフェライト粒子の粉末を含む場合、磁性粉の平均アスペクト比は上述の方法で求められ、磁性粉の平均体積Vaveは下記に示す方法で求められる。
なお、磁性粉がコバルトフェライト粒子のような立方体状の形状を有している場合、磁性粉の平均体積Vave(粒子体積)は、以下のようにして求めることができる。まず、磁気記録媒体1の磁性層13の表面をTEMにより観察し、次に、撮影したTEM写真から50個の磁性粉を無作為に選び出し、各磁性粉の辺の長さDCを測定する。続いて、測定した50個の磁性粉の辺の長さDCを単純に平均(算術平均)して平均辺長DCaveを求める。次に、平均辺長DCaveを用いて以下の式から磁性粉の平均体積Vave(粒子体積)を求める。
Vave=DCave3
Vave=DCave3
(結着剤)
結着剤としては、ポリウレタン系樹脂、塩化ビニル系樹脂等に架橋反応を付与した構造の樹脂が好ましい。しかしながら結着剤はこれらに限定されるものではなく、磁気記録媒体1に対して要求される物性等に応じて、その他の樹脂を適宜配合してもよい。配合する樹脂としては、通常、塗布型の磁気記録媒体1において一般的に用いられる樹脂であれば、特に限定されない。
結着剤としては、ポリウレタン系樹脂、塩化ビニル系樹脂等に架橋反応を付与した構造の樹脂が好ましい。しかしながら結着剤はこれらに限定されるものではなく、磁気記録媒体1に対して要求される物性等に応じて、その他の樹脂を適宜配合してもよい。配合する樹脂としては、通常、塗布型の磁気記録媒体1において一般的に用いられる樹脂であれば、特に限定されない。
例えば、ポリ塩化ビニル、ポリ酢酸ビニル、塩化ビニル-酢酸ビニル共重合体、塩化ビニル-塩化ビニリデン共重合体、塩化ビニル-アクリロニトリル共重合体、アクリル酸エステル-アクリロニトリル共重合体、アクリル酸エステル-塩化ビニル-塩化ビニリデン共重合体、塩化ビニル-アクリロニトリル共重合体、アクリル酸エステル-アクリロニトリル共重合体、アクリル酸エステル-塩化ビニリデン共重合体、メタクリル酸エステル-塩化ビニリデン共重合体、メタクリル酸エステル-塩化ビニル共重合体、メタクリル酸エステル-エチレン共重合体、ポリ弗化ビニル、塩化ビニリデン-アクリロニトリル共重合体、アクリロニトリル-ブタジエン共重合体、ポリアミド樹脂、ポリビニルブチラール、セルロース誘導体(セルロースアセテートブチレート、セルロースダイアセテート、セルローストリアセテート、セルロースプロピオネート、ニトロセルロース)、スチレンブタジエン共重合体、ポリエステル樹脂、アミノ樹脂、合成ゴム等が挙げられる。
また、熱硬化性樹脂、または反応型樹脂の例としては、フェノール樹脂、エポキシ樹脂、尿素樹脂、メラミン樹脂、アルキッド樹脂、シリコーン樹脂、ポリアミン樹脂、尿素ホルムアルデヒド樹脂等が挙げられる。
また、上述した各結着剤には、磁性粉の分散性を向上させる目的で、-SO3M、-OSO3M、-COOM、P=O(OM)2等の極性官能基が導入されていてもよい。ここで、式中Mは、水素原子、またはリチウム、カリウム、ナトリウム等のアルカリ金属である。
さらに、極性官能基としては、-NR1R2、-NR1R2R3+X-の末端基を有する側鎖型のもの、>NR1R2+X-の主鎖型のものが挙げられる。ここで、式中R1、R2、R3は、水素原子、または炭化水素基であり、X-は弗素、塩素、臭素、ヨウ素等のハロゲン元素イオン、または無機もしくは有機イオンである。また、極性官能基としては、-OH、-SH、-CN、エポキシ基等も挙げられる。
(潤滑剤)
潤滑剤は、下記の一般式(1)で示される化合物、および下記の一般式(2)で示される化合物を含むことが好ましい。潤滑剤がこれらの化合物を含むことで、磁性層13の表面の動摩擦係数を特に低減することができる。したがって、磁気記録媒体1の走行性をさらに向上することができる。
CH3(CH2)nCOOH ・・・(1)
(但し、一般式(1)において、nは14以上22以下の範囲から選ばれる整数である。)
CH3(CH2)pCOO(CH2)qCH3 ・・・(2)
(但し、一般式(2)において、pは14以上22以下の範囲から選ばれる整数であり、qは2以上5以下の範囲から選ばれる整数である。)
潤滑剤は、下記の一般式(1)で示される化合物、および下記の一般式(2)で示される化合物を含むことが好ましい。潤滑剤がこれらの化合物を含むことで、磁性層13の表面の動摩擦係数を特に低減することができる。したがって、磁気記録媒体1の走行性をさらに向上することができる。
CH3(CH2)nCOOH ・・・(1)
(但し、一般式(1)において、nは14以上22以下の範囲から選ばれる整数である。)
CH3(CH2)pCOO(CH2)qCH3 ・・・(2)
(但し、一般式(2)において、pは14以上22以下の範囲から選ばれる整数であり、qは2以上5以下の範囲から選ばれる整数である。)
(添加剤)
磁性層13は、非磁性補強粒子として、酸化アルミニウム(α、βまたはγアルミナ)、酸化クロム、酸化珪素、ダイヤモンド、ガーネット、エメリー、窒化ホウ素、チタンカーバイト、炭化珪素、炭化チタン、酸化チタン(ルチル型またはアナターゼ型の酸化チタン)等をさらに含んでいてもよい。
磁性層13は、非磁性補強粒子として、酸化アルミニウム(α、βまたはγアルミナ)、酸化クロム、酸化珪素、ダイヤモンド、ガーネット、エメリー、窒化ホウ素、チタンカーバイト、炭化珪素、炭化チタン、酸化チタン(ルチル型またはアナターゼ型の酸化チタン)等をさらに含んでいてもよい。
[非磁性層12]
非磁性層12は、非磁性粉及び結着剤を含む。非磁性層12は、必要に応じて、電動性粒子、潤滑剤、硬化剤、防錆材などの添加剤を含んでいてもよい。
非磁性層12は、非磁性粉及び結着剤を含む。非磁性層12は、必要に応じて、電動性粒子、潤滑剤、硬化剤、防錆材などの添加剤を含んでいてもよい。
非磁性層12の厚さは、好ましくは0.6μm以上2.0μm以下、より好ましくは0.6μm以上1.4μm以下、より好ましくは0.8μm以上1.4μm以下、より好ましくは0.6μm以上1.0μm以下である。非磁性層12の厚さは、磁性層13の厚さを求める方法と同様の方法(例えば、TEM)により求めることができる。なお、TEM像の倍率は、非磁性層12の厚さに応じて適宜調整される。
(非磁性粉)
非磁性粉は、例えば無機粒子粉または有機粒子粉の少なくとも1種を含む。また、非磁性粉は、カーボンブラック等の炭素材料を含んでいてもよい。なお、1種の非磁性粉を単独で用いてもよいし、2種以上の非磁性粉を組み合わせて用いてもよい。無機粒子は、例えば、金属、金属酸化物、金属炭酸塩、金属硫酸塩、金属窒化物、金属炭化物または金属硫化物等を含む。非磁性粉の形状としては、例えば、針状、球状、立方体状、板状等の各種形状が挙げられるが、これに限定されるものではない。
非磁性粉は、例えば無機粒子粉または有機粒子粉の少なくとも1種を含む。また、非磁性粉は、カーボンブラック等の炭素材料を含んでいてもよい。なお、1種の非磁性粉を単独で用いてもよいし、2種以上の非磁性粉を組み合わせて用いてもよい。無機粒子は、例えば、金属、金属酸化物、金属炭酸塩、金属硫酸塩、金属窒化物、金属炭化物または金属硫化物等を含む。非磁性粉の形状としては、例えば、針状、球状、立方体状、板状等の各種形状が挙げられるが、これに限定されるものではない。
(結着剤)
結着剤は、上述の磁性層13と同様である。
結着剤は、上述の磁性層13と同様である。
[バック層14]
バック層14は、非磁性粉及び結着剤を含む。バック層14は、必要に応じて潤滑剤、硬化剤及び帯電防止剤などの添加剤を含んでいてもよい。非磁性粉、結着剤としては、上述の非磁性層12に用いられる材料と同様の材料が用いられる。
バック層14は、非磁性粉及び結着剤を含む。バック層14は、必要に応じて潤滑剤、硬化剤及び帯電防止剤などの添加剤を含んでいてもよい。非磁性粉、結着剤としては、上述の非磁性層12に用いられる材料と同様の材料が用いられる。
(非磁性粉)
非磁性粉の平均粒子サイズは、好ましくは10nm以上150nm以下、より好ましくは15nm以上110nm以下である。非磁性粉の平均粒子サイズは、上記の磁性粉の平均粒子サイズDと同様にして求められる。非磁性粉が、2以上の粒度分布を有する非磁性粉を含んでいてもよい。
非磁性粉の平均粒子サイズは、好ましくは10nm以上150nm以下、より好ましくは15nm以上110nm以下である。非磁性粉の平均粒子サイズは、上記の磁性粉の平均粒子サイズDと同様にして求められる。非磁性粉が、2以上の粒度分布を有する非磁性粉を含んでいてもよい。
バック層14の平均厚みの上限値は、好ましくは0.6μm以下、より好ましくは0.5μm以下、さらにより好ましくは0.4μm以下である。バック層14の平均厚みの上限値が0.6μm以下であると、磁気記録媒体1の平均厚みが5.6μmである場合でも、非磁性層12や基材11の厚みを厚く保つことができるので、磁気記録媒体1の記録再生装置内での走行安定性を保つことができる。バック層14の平均厚みの下限値は特に限定されるものではないが、例えば0.2μm以上である。
バック層14の平均厚みは以下のようにして求められる。まず、1/2インチ幅の磁気記録媒体1を準備し、それを250mmの長さに切り出し、サンプルを作製する。次に、測定装置としてMitutoyo社製レーザーホロゲージを用いて、サンプルの厚みを5点以上で測定し、それらの測定値を単純に平均(算術平均)して、磁気記録媒体1の平均値tT[μm]を算出する。なお、測定位置は、サンプルから無作為に選ばれるものとする。続いて、サンプルのバック層14をMEK(メチルエチルケトン)または希塩酸等の溶剤で除去する。その後、再び上記のレーザーホロゲージを用いてサンプルの厚みを5点以上で測定し、それらの測定値を単純に平均(算術平均)して、バック層14を除去した磁気記録媒体1の平均値tB[μm]を算出する。なお、測定位置は、サンプルから無作為に選ばれるものとする。その後、以下の式よりバック層14の平均厚みtb[μm]を求める。
tb[μm]=tT[μm]-tB[μm]
tb[μm]=tT[μm]-tB[μm]
バック層14は、多数の突部が設けられた表面を有している。多数の突部は、磁気記録媒体1をロール状に巻き取った状態において、磁性層13の表面に多数の孔部を形成するためのものである。多数の孔部は、例えば、バック層14の表面から突出された多数の非磁性粒子により構成されている。
ここでの説明では、バック層14の表面に設けられた多数の突部を、磁性層13の表面に転写することにより、磁性層13の表面に多数の孔部を形成する場合について説明したが、多数の孔部の形成方法はこれに限定されるものではない。例えば、磁性層形成用塗料に含まれる溶剤の種類および磁性層形成用塗料の乾燥条件等を調整することで、磁性層13の表面に多数の孔部を形成するようにしてもよい。
[磁気記録媒体の平均厚み]
磁気記録媒体1の平均厚み(平均全厚)の上限値は、好ましくは5.6μm以下、より好ましくは5.4μm以下、より好ましくは5.2μm以下、より好ましくは5.0μm以下、より好ましくは4.8μm以下、より好ましくは、4.6μm以下、さらにより好ましくは4.4μm以下である。磁気記録媒体1の平均厚みが5.6μm以下であると、カートリッジ21内に記録できる記録容量を一般的な磁気記録媒体よりも高めることができる。磁気記録媒体1の平均厚みの下限値は特に限定されるものではないが、例えば3.5μm以上である。
磁気記録媒体1の平均厚み(平均全厚)の上限値は、好ましくは5.6μm以下、より好ましくは5.4μm以下、より好ましくは5.2μm以下、より好ましくは5.0μm以下、より好ましくは4.8μm以下、より好ましくは、4.6μm以下、さらにより好ましくは4.4μm以下である。磁気記録媒体1の平均厚みが5.6μm以下であると、カートリッジ21内に記録できる記録容量を一般的な磁気記録媒体よりも高めることができる。磁気記録媒体1の平均厚みの下限値は特に限定されるものではないが、例えば3.5μm以上である。
磁気記録媒体1の平均厚みは、上述のバック層14の平均厚みの求め方において説明した手順により求められる。
(保磁力Hc)
磁気記録媒体1の長手方向における保磁力Hcの上限値は、例えば、2500以下、好ましくは2000Oe以下、より好ましくは1900Oe以下、さらにより好ましくは1800Oe以下である。
磁気記録媒体1の長手方向における保磁力Hcの上限値は、例えば、2500以下、好ましくは2000Oe以下、より好ましくは1900Oe以下、さらにより好ましくは1800Oe以下である。
磁気記録媒体1の長手方向に測定した保磁力Hcの下限値が、好ましくは1000Oe以上、であると、記録ヘッドからの漏れ磁束による減磁を押さえることができる。
上記の保磁力Hcは以下のようにして求められる。まず、磁気記録媒体1が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、測定サンプルが作成される。そして、振動試料型磁力計(Vibrating Sample Magnetometer:VSM)を用いて磁気記録媒体1の長手方向((磁気記録媒体1の走行方向)に対応する測定サンプル(磁気記録媒体1全体)のM-Hループが測定される。次に、アセトンまたはエタノール等が用いられて塗膜(非磁性層12、磁性層13およびバック層14等)が払拭され、基材11のみが残される。そして、得られた基材11が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、バックグラウンド補正用のサンプル(以下、単に補正用サンプル)とされる。その後、VSMが用いられて基材11の長手方向(磁気記録媒体1の走行方向)に対応する補正用サンプル(基材11)のM-Hループが測定される。
測定サンプル(磁気記録媒体1全体)のM-Hループ、補正用サンプル(基材11)のM-Hループの測定においては、東英工業製の好感度振動試料型磁力計「VSM-P7-15型」が用いられる。測定条件は、測定モード:フルループ、最大磁界:15kOe、磁界ステップ:40bit、Time constant of Locking amp:0.3sec、Waiting time:1sec、MH平均数:20とされる。
2つのM-Hループが得られた後、測定サンプル(磁気記録媒体1全体)のM-Hループから補正用サンプル(基材11)のM-Hループが差し引かれることで、バックグラウンド補正が行われ、バックグラウンド補正後のM-Hループが得られる。このバックグラウンド補正の計算には、「VSM-P7-15型」に付属されている測定・解析プログラムが用いられる。
得られたバックグラウンド補正後のM-Hループから保磁力Hcが求められる。なお、この計算には、「VSM-P7-15型」に付属されている測定・解析プログラムが用いられる。なお、上記のM-Hループの測定はいずれも、25℃にて行われるものとする。また、M-Hループを磁気記録媒体1の長手方向に測定する際の"反磁界補正"は行わないものとする。
(配向度(角形比))
垂直配向度は以下のようにして求められる。まず、磁気記録媒体1が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、測定サンプルが作成される。そして、VSMを用いて磁気記録媒体1の垂直方向(厚み方向)に対応する測定サンプル(磁気記録媒体1全体)のM-Hループが測定される。次に、アセトンまたはエタノール等が用いられて塗膜(非磁性層12、磁性層13およびバック層14等)が払拭され、基材11のみが残される。そして、得られた基材11が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、バックグラウンド補正用のサンプル(以下、単に補正用サンプル)とされる。その後、VSMが用いられて基材11の垂直方向(磁気記録媒体1の垂直方向)に対応する補正用サンプル(基材11)のM-Hループが測定される。
垂直配向度は以下のようにして求められる。まず、磁気記録媒体1が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、測定サンプルが作成される。そして、VSMを用いて磁気記録媒体1の垂直方向(厚み方向)に対応する測定サンプル(磁気記録媒体1全体)のM-Hループが測定される。次に、アセトンまたはエタノール等が用いられて塗膜(非磁性層12、磁性層13およびバック層14等)が払拭され、基材11のみが残される。そして、得られた基材11が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、バックグラウンド補正用のサンプル(以下、単に補正用サンプル)とされる。その後、VSMが用いられて基材11の垂直方向(磁気記録媒体1の垂直方向)に対応する補正用サンプル(基材11)のM-Hループが測定される。
測定サンプル(磁気記録媒体1全体)のM-Hループ、補正用サンプル(基材11)のM-Hループの測定においては、東英工業製の好感度振動試料型磁力計「VSM-P7-15型」が用いられる。測定条件は、測定モード:フルループ、最大磁界:15kOe、磁界ステップ:40bit、Time constant of Locking amp:0.3sec、Waiting time:1sec、MH平均数:20とされる。
2つのM-Hループが得られた後、測定サンプル(磁気記録媒体1全体)のM-Hループから補正用サンプル(基材11)のM-Hループが差し引かれることで、バックグラウンド補正が行われ、バックグラウンド補正後のM-Hループが得られる。このバックグラウンド補正の計算には、「VSM-P7-15型」に付属されている測定・解析プログラムが用いられる。
得られたバックグラウンド補正後のM-Hループの飽和磁化Ms(emu)および残留磁化Mr(emu)が以下の式に代入されて、垂直配向度(%)が計算される。なお、上記のM-Hループの測定はいずれも、25℃にて行われるものとする。また、M-Hループを磁気記録媒体1の垂直方向に測定する際の"反磁界補正"は行わないものとする。なお、この計算には、「VSM-P7-15型」に付属されている測定・解析プログラムが用いられる。
垂直配向度(%)=(Mr/Ms)×100
垂直配向度(%)=(Mr/Ms)×100
磁気記録媒体1の長手方向(走行方向)における配向度(長手配向度)が、好ましくは35%以下、より好ましくは30%以下、さらにより好ましくは25%以下である。長手配向度が35%以下であると、磁性粉の垂直配向性が十分に高くなるため、より優れたSNRを得ることができる。
長手配向度は、M-Hループを磁気記録媒体1および基材11の長手方向(走行方向)に測定すること以外は垂直配向度と同様にして求められる。
(動摩擦係数)
磁気記録媒体1に加わる張力が1.2Nであるときの磁性層13の表面と磁気ヘッドの間の動摩擦係数μAと、磁気記録媒体1に加わる張力が0.4Nであるときの磁性層13の表面と磁気ヘッドの間の動摩擦係数μBとの比率(μB/μA)が、好ましくは1.0以上で2.0以下であると、走行時の張力変動による摩擦係数の変化を小さくできるためテープの走行を安定させることができる。
磁気記録媒体1に加わる張力が1.2Nであるときの磁性層13の表面と磁気ヘッドの間の動摩擦係数μAと、磁気記録媒体1に加わる張力が0.4Nであるときの磁性層13の表面と磁気ヘッドの間の動摩擦係数μBとの比率(μB/μA)が、好ましくは1.0以上で2.0以下であると、走行時の張力変動による摩擦係数の変化を小さくできるためテープの走行を安定させることができる。
磁気記録媒体1に加わる張力が0.6Nであるときの磁性層13の表面と磁気ヘッドの間の動摩擦係数μAが走行5回目の値μ5と1000回目の値 μ1000との比率(μ1000/μ5)が、好ましくは1.0以上2.0以下、より好ましくは1.0以上1.5以下である。比率(μB/μA)が1.0以上で2.0以下であると、多数回走行による摩擦係数の変化を小さくできるためテープの走行を安定させることができる。
<磁気記録媒体の製造方法>
次に、磁気記録媒体1の製造方法について説明する。まず、非磁性粉、結着剤および潤滑剤等を溶剤に混練、分散させることにより、非磁性層形成用塗料を調製する。次に、磁性粉、結着剤および潤滑剤等を溶剤に混練、分散させることにより、磁性層形成用塗料を調製する。次に、結着剤および非磁性粉等を溶剤に混練、分散させることにより、バック層形成用塗料を調製する。磁性層形成用塗料、非磁性層形成用塗料およびバック層形成用塗料の調製には、例えば、以下の溶剤、分散装置および混練装置を用いることができる。
次に、磁気記録媒体1の製造方法について説明する。まず、非磁性粉、結着剤および潤滑剤等を溶剤に混練、分散させることにより、非磁性層形成用塗料を調製する。次に、磁性粉、結着剤および潤滑剤等を溶剤に混練、分散させることにより、磁性層形成用塗料を調製する。次に、結着剤および非磁性粉等を溶剤に混練、分散させることにより、バック層形成用塗料を調製する。磁性層形成用塗料、非磁性層形成用塗料およびバック層形成用塗料の調製には、例えば、以下の溶剤、分散装置および混練装置を用いることができる。
上述の塗料調製に用いられる溶剤としては、例えば、アセトン、メチルエチルケトン、メチルイソブチルケトン、シクロヘキサノン等のケトン系溶媒、メタノール、エタノール、プロパノール等のアルコール系溶媒、酢酸メチル、酢酸エチル、酢酸ブチル、酢酸プロピル、乳酸エチル、エチレングリコールアセテート等のエステル系溶媒、ジエチレングリコールジメチルエーテル、2-エトキシエタノール、テトラヒドロフラン、ジオキサン等のエーテル系溶媒、ベンゼン、トルエン、キシレン等の芳香族炭化水素系溶媒、メチレンクロライド、エチレンクロライド、四塩化炭素、クロロホルム、クロロベンゼン等のハロゲン化炭化水素系溶媒等が挙げられる。これらは単独で用いてもよく、適宜混合して用いてもよい。
上述の塗料調製に用いられる混練装置としては、例えば、連続二軸混練機、多段階で希釈可能な連続二軸混練機、ニーダー、加圧ニーダー、ロールニーダー等の混練装置を用いることができるが、特にこれらの装置に限定されるものではない。また、上述の塗料調製に用いられる分散装置としては、例えば、ロールミル、ボールミル、横型サンドミル、縦型サンドミル、スパイクミル、ピンミル、タワーミル、パールミル(例えばアイリッヒ社製「DCPミル」等)、ホモジナイザー、超音波分散機等の分散装置を用いることができるが、特にこれらの装置に限定されるものではない。
次に、非磁性層形成用塗料を基材11の一方の主面に塗布して乾燥させることにより、非磁性層12を形成する。続いて、この非磁性層12上に磁性層形成用塗料を塗布して乾燥させることにより、磁性層13を非磁性層12上に形成する。なお、乾燥の際に、例えばソレノイドコイルにより、磁性粉を基材11の厚み方向に磁場配向させることが好ましい。また、乾燥の際に、例えばソレノイドコイルにより、磁性粉を基材11の走行方向(長手方向)に磁場配向させたのちに、基材11の厚み方向に磁場配向させるようにしてもよい。磁性層13の形成後、バック層形成用塗料を基材11の他方の主面に塗布して乾燥させることにより、バック層14を形成する。これにより、磁気記録媒体1が得られる。
その後、得られた磁気記録媒体1にカレンダー処理を行い、磁性層13の表面を平滑化する。次に、カレンダー処理が施された磁気記録媒体1をロール状に巻き取ったのち、この状態で磁気記録媒体1に加熱処理を行うことにより、バック層14の表面の多数の突部14Aを磁性層13の表面に転写する。これにより、磁性層13の表面に多数の孔部13Aが形成される。
加熱処理の温度は、55℃以上75℃以下であることが好ましい。加熱処理の温度が55℃以上であると、良好な転写性を得ることができる。一方、加熱処理の温度が75℃以上であると、細孔量が多くなりすぎ、表面の潤滑剤が過多になってしまう。ここで、加熱処理の温度は、磁気記録媒体1を保持する雰囲気の温度である。
加熱処理の時間は、15時間以上40時間以下であることが好ましい。加熱処理の時間が15時間以上であると、良好な転写性を得ることができる。一方、加熱処理の時間が40時間以下であると、生産性の低下を抑制することができる。
最後に、磁気記録媒体1を所定の幅(例えば1/2インチ幅)に裁断する。以上により、目的とする磁気記録媒体1が得られる。
[磁性層形成用塗料の調製工程]
次に、磁性層形成用塗料の調整工程について説明する。まず、下記配合の第1組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第1組成物と、下記配合の第2組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、磁性層形成用塗料を調製した。
次に、磁性層形成用塗料の調整工程について説明する。まず、下記配合の第1組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第1組成物と、下記配合の第2組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、磁性層形成用塗料を調製した。
(第1組成物)
バリウムフェライト(BaFe12O19)粒子の粉末(六角板状、アスペクト比2.8、粒子体積1950nm3):100質量部
塩化ビニル系樹脂(シクロヘキサノン溶液30質量%):51.3質量部(溶液含む)
(重合度300、Mn=10000、極性基としてOSO3K=0.07mmol/g、2級OH=0.3mmol/gを含有する。)
酸化アルミニウム粉末:5質量部
(α-Al2O3、平均粒径0.2μm)
カーボンブラック:2質量部
(東海カーボン社製、商品名:シーストTA)
バリウムフェライト(BaFe12O19)粒子の粉末(六角板状、アスペクト比2.8、粒子体積1950nm3):100質量部
塩化ビニル系樹脂(シクロヘキサノン溶液30質量%):51.3質量部(溶液含む)
(重合度300、Mn=10000、極性基としてOSO3K=0.07mmol/g、2級OH=0.3mmol/gを含有する。)
酸化アルミニウム粉末:5質量部
(α-Al2O3、平均粒径0.2μm)
カーボンブラック:2質量部
(東海カーボン社製、商品名:シーストTA)
(第2組成物)
塩化ビニル系樹脂:1.1質量部
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
n-ブチルステアレート:2質量部
メチルエチルケトン:121.3質量部
トルエン:121.3質量部
シクロヘキサノン:60.7質量部
塩化ビニル系樹脂:1.1質量部
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
n-ブチルステアレート:2質量部
メチルエチルケトン:121.3質量部
トルエン:121.3質量部
シクロヘキサノン:60.7質量部
最後に、上述のようにして調製した磁性層形成用塗料に、硬化剤として、ポリイソシアネート(商品名:コロネートL、日本ポリウレタン社製):4質量部と、ミリスチン酸:2質量部とを添加した。
[非磁性層形成用塗料の調製工程]
次に、非磁性層形成用塗料の調整工程について説明する。まず、下記配合の第3組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第3組成物と、下記配合の第4組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、非磁性層形成用塗料を調製した。
次に、非磁性層形成用塗料の調整工程について説明する。まず、下記配合の第3組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第3組成物と、下記配合の第4組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、非磁性層形成用塗料を調製した。
(第3組成物)
針状酸化鉄粉末:100質量部
(α-Fe2O3、平均長軸長0.15μm)
塩化ビニル系樹脂:55.6質量部
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
カーボンブラック:10質量部
(平均粒径20nm)
針状酸化鉄粉末:100質量部
(α-Fe2O3、平均長軸長0.15μm)
塩化ビニル系樹脂:55.6質量部
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
カーボンブラック:10質量部
(平均粒径20nm)
(第4組成物)
ポリウレタン系樹脂UR8200(東洋紡績製):18.5質量部
n-ブチルステアレート:2質量部
メチルエチルケトン:108.2質量部
トルエン:108.2質量部
シクロヘキサノン:18.5質量部
ポリウレタン系樹脂UR8200(東洋紡績製):18.5質量部
n-ブチルステアレート:2質量部
メチルエチルケトン:108.2質量部
トルエン:108.2質量部
シクロヘキサノン:18.5質量部
最後に、上述のようにして調製した非磁性層形成用塗料に、硬化剤として、ポリイソシアネート(商品名:コロネートL、日本ポリウレタン社製):4質量部と、ミリスチン酸:2質量部とを添加した。
[バック層形成用塗料の調製工程]
次に、バック層形成用塗料の調整工程について説明する。下記原料を、ディスパーを備えた攪拌タンクで混合を行い、フィルター処理を行うことで、バック層形成用塗料を調製した。
カーボンブラック粒子の粉末(平均粒径20nm):90質量部
カーボンブラック粒子の粉末(平均粒径270nm):10質量部
ポリエステルポリウレタン:100質量部
(日本ポリウレタン社製、商品名:N-2304)
メチルエチルケトン:500質量部
トルエン:400質量部
シクロヘキサノン:100質量部
次に、バック層形成用塗料の調整工程について説明する。下記原料を、ディスパーを備えた攪拌タンクで混合を行い、フィルター処理を行うことで、バック層形成用塗料を調製した。
カーボンブラック粒子の粉末(平均粒径20nm):90質量部
カーボンブラック粒子の粉末(平均粒径270nm):10質量部
ポリエステルポリウレタン:100質量部
(日本ポリウレタン社製、商品名:N-2304)
メチルエチルケトン:500質量部
トルエン:400質量部
シクロヘキサノン:100質量部
なお、無機粒子の種類および配合量を以下のように変更してもよい。
カーボンブラック粒子の粉末(平均粒径20nm):80質量部
カーボンブラック粒子の粉末(平均粒径270nm):20質量部
カーボンブラック粒子の粉末(平均粒径20nm):80質量部
カーボンブラック粒子の粉末(平均粒径270nm):20質量部
また、無機粒子の種類および配合量を以下のように変更してもよい。
カーボンブラック粒子の粉末(平均粒径20nm):100質量部
カーボンブラック粒子の粉末(平均粒径20nm):100質量部
[塗布工程]
上述のようにして調製した磁性層形成用塗料および非磁性層形成用塗料を用いて、非磁性支持体である長尺のポレエチレンナフタレートフィルム(以下「PENフィルム」という。)(例えば、平均厚み4.0μm)の一方の主面上に平均厚み1.0~1.1μmの非磁性層、および平均厚み40~100nmの磁性層を以下のようにして形成した。まず、PENフィルムの一方の主面上に非磁性層形成用塗料を塗布、乾燥させることにより、非磁性層を形成した。次に、非磁性層上に磁性層形成用塗料を塗布、乾燥させることにより、磁性層を形成した。なお、磁性層形成用塗料の乾燥の際に、ソレノイドコイルにより、磁性粉をフィルムの厚み方向に磁場配向させた。なお、ソレノイドコイルからの磁界の強さを調整したり(磁性粉の保持力の2~3倍)、磁性層形成用塗料の固形分を調整したり、磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)の調整により、磁場中で磁性粉が配向するための条件を調整したりすることによって、磁気記録媒体の厚み方向(垂直方向)における配向度および長手方向における配向度を所定の値に設定した。続いて、PENフィルムの他方の主面上にバック層形成用塗料を塗布、乾燥させることにより、非磁性層を形成した。これにより、磁気記録媒体が得られた。なお、配向度を高くするためには、磁性層形成用塗料の分散状態を良くする必要がある。さらに、垂直配向度を高くするために、磁気記録媒体が配向装置内に入る前に、事前に磁性粉を磁化しておく方法も有効である。
上述のようにして調製した磁性層形成用塗料および非磁性層形成用塗料を用いて、非磁性支持体である長尺のポレエチレンナフタレートフィルム(以下「PENフィルム」という。)(例えば、平均厚み4.0μm)の一方の主面上に平均厚み1.0~1.1μmの非磁性層、および平均厚み40~100nmの磁性層を以下のようにして形成した。まず、PENフィルムの一方の主面上に非磁性層形成用塗料を塗布、乾燥させることにより、非磁性層を形成した。次に、非磁性層上に磁性層形成用塗料を塗布、乾燥させることにより、磁性層を形成した。なお、磁性層形成用塗料の乾燥の際に、ソレノイドコイルにより、磁性粉をフィルムの厚み方向に磁場配向させた。なお、ソレノイドコイルからの磁界の強さを調整したり(磁性粉の保持力の2~3倍)、磁性層形成用塗料の固形分を調整したり、磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)の調整により、磁場中で磁性粉が配向するための条件を調整したりすることによって、磁気記録媒体の厚み方向(垂直方向)における配向度および長手方向における配向度を所定の値に設定した。続いて、PENフィルムの他方の主面上にバック層形成用塗料を塗布、乾燥させることにより、非磁性層を形成した。これにより、磁気記録媒体が得られた。なお、配向度を高くするためには、磁性層形成用塗料の分散状態を良くする必要がある。さらに、垂直配向度を高くするために、磁気記録媒体が配向装置内に入る前に、事前に磁性粉を磁化しておく方法も有効である。
[カレンダー工程、転写工程]
続いて、カレンダー処理を行い、磁性層の表面を平滑化した。次に、得られた磁気記録媒体をロール状に巻き取ったのち、この状態で磁気記録媒体に60℃、10時間の加熱処理を2回行った。これにより、バック層の表面の多数の突部が磁性層の表面に転写され、磁性層の表面に多数の孔部が形成された。
続いて、カレンダー処理を行い、磁性層の表面を平滑化した。次に、得られた磁気記録媒体をロール状に巻き取ったのち、この状態で磁気記録媒体に60℃、10時間の加熱処理を2回行った。これにより、バック層の表面の多数の突部が磁性層の表面に転写され、磁性層の表面に多数の孔部が形成された。
[裁断工程]
上述のようにして得られた磁気記録媒体を1/2インチ(12.65mm)幅に裁断した。これにより、目的とする長尺状の磁気記録媒体が得られた。
上述のようにして得られた磁気記録媒体を1/2インチ(12.65mm)幅に裁断した。これにより、目的とする長尺状の磁気記録媒体が得られた。
<カートリッジの詳細>
続いて、カートリッジ21の詳細について説明する。
続いて、カートリッジ21の詳細について説明する。
[カートリッジの構成例1]
図20は、カートリッジ21の構成の一例を示す分解斜視図である。カートリッジ21は、下シェル312Aと上シェル312Bとで構成されるカートリッジケース312の内部に、テープ状の磁気記録媒体(以下「磁気テープ」という。)MTが巻かれたリール313と、リール313の回転をロックするためのリールロック314およびリールスプリング315と、リール313のロック状態を解除するためのスパイダ316と、下シェル312Aと上シェル312Bに跨ってカートリッジケース312に設けられたテープ引出口312Cを開閉するスライドドア317と、スライドドア317をテープ引出口312Cの閉位置に付勢するドアスプリング318と、誤消去を防止するためのライトプロテクト319と、カートリッジメモリ311とを備える。リール313は、中心部に開口を有する略円盤状であって、プラスチック等の硬質の材料からなるリールハブ313Aとフランジ313Bとにより構成される。磁気テープMTの一端部には、リーダーピン320が設けられている。磁気テープMTは、上述した本実施形態に係る磁気記録媒体1に相当する。
図20は、カートリッジ21の構成の一例を示す分解斜視図である。カートリッジ21は、下シェル312Aと上シェル312Bとで構成されるカートリッジケース312の内部に、テープ状の磁気記録媒体(以下「磁気テープ」という。)MTが巻かれたリール313と、リール313の回転をロックするためのリールロック314およびリールスプリング315と、リール313のロック状態を解除するためのスパイダ316と、下シェル312Aと上シェル312Bに跨ってカートリッジケース312に設けられたテープ引出口312Cを開閉するスライドドア317と、スライドドア317をテープ引出口312Cの閉位置に付勢するドアスプリング318と、誤消去を防止するためのライトプロテクト319と、カートリッジメモリ311とを備える。リール313は、中心部に開口を有する略円盤状であって、プラスチック等の硬質の材料からなるリールハブ313Aとフランジ313Bとにより構成される。磁気テープMTの一端部には、リーダーピン320が設けられている。磁気テープMTは、上述した本実施形態に係る磁気記録媒体1に相当する。
カートリッジ21は、LTO(Linear Tape-Open)規格に準拠した磁気テープカートリッジであってもよいし、LTO規格とは別の規格に準拠した磁気テープカートリッジであってもよい。
カートリッジメモリ311は、カートリッジ21の1つの角部の近傍に設けられている。カートリッジ21がデータ記録装置20(図5)にロードされた状態において、カートリッジメモリ311は、データ記録装置20のリーダライタと対向するようになっている。カートリッジメモリ311は、LTO規格に準拠した無線通信規格でデータ記録装置20、具体的にはそのリーダライタと通信を行う。
図21は、カートリッジメモリ311の構成の一例を示すブロック図である。カートリッジメモリ311は、規定の通信規格でリーダライタと通信を行うアンテナコイル(通信部)431と、アンテナコイル431により受信した電波から、誘導起電力を用いて発電、整流して電源を生成する整流・電源回路432と、アンテナコイル431により受信した電波から、同じく誘導起電力を用いてクロックを生成するクロック回路433と、アンテナコイル431により受信した電波の検波およびアンテナコイル431により送信する信号の変調を行う検波・変調回路434と、検波・変調回路434から抽出されるデジタル信号から、コマンドおよびデータを判別し、これを処理するための論理回路等で構成されるコントローラ(制御部)435と、情報を記憶するメモリ(記憶部)436とを備える。また、カートリッジメモリ311は、アンテナコイル431に対して並列に接続されたキャパシタ437を備え、アンテナコイル431とキャパシタ437により共振回路が構成される。
メモリ436は、カートリッジ21に関連する情報等を記憶する。メモリ436は、不揮発性メモリ(Non Volatile Memory:NVM)である。メモリ436の記憶容量は、好ましくは約32KB以上である。
メモリ436は、第1の記憶領域436Aと第2の記憶領域436Bとを有する。第1の記憶領域436Aは、例えば、LTO8以前のLTO規格のカートリッジメモリ(以下「従来のカートリッジメモリ」という。)の記憶領域に対応し、LTO8以前のLTO規格に準拠した情報を記憶するための領域である。LTO8以前のLTO規格に準拠した情報は、例えば製造情報(例えばカートリッジ21の固有番号等)、使用履歴(例えばテープ引出回数(Thread Count)等)等である。
第2の記憶領域436Bは、従来のカートリッジメモリの記憶領域に対する拡張記憶領域に相当する。第2の記憶領域436Bは、付加情報を記憶するための領域である。ここで、付加情報は、例えば、LTO8以前のLTO規格で規定されていない、カートリッジ21に関連する情報を意味する。付加情報の例としては、テンション調整情報、管理台帳データ、Index情報、または磁気テープMTに記憶された動画のサムネイル情報等が挙げられるが、これらのデータに限定されるものではない。テンション調整情報は、磁気テープMTの長手方向にかかるテンションを調整するための情報である。テンション調整情報は、磁気テープMTに対するデータ記録時における、隣接するサーボバンド間の距離(隣接するサーボバンドに記録されたサーボパターン間の距離)を含む。隣接するサーボバンド間の距離は、磁気テープMTの幅に関連する幅関連情報の一例である。以下の説明において、第1の記憶領域436Aに記憶される情報を「第1の情報」といい、第2の記憶領域436Bに記憶される情報を「第2の情報」ということがある。
メモリ436は、複数のバンクを有していてもよい。この場合、複数のバンクうちの一部のバンクにより第1の記憶領域436Aが構成され、残りのバンクにより第2の記憶領域436Bが構成されてもよい。
アンテナコイル431は、電磁誘導により誘起電圧を誘起する。コントローラ435は、アンテナコイル431を介して、規定の通信規格でデータ記録装置20と通信を行う。具体的には例えば、相互認証、コマンドの送受信またはデータのやり取り等を行う。
コントローラ435は、アンテナコイル431を介してデータ記録装置20から受信した情報をメモリ436に記憶する。例えば、アンテナコイル431を介してデータ記録装置20から受信したテンション調整情報をメモリ436の第2の記憶領域436Bに記憶する。コントローラ435は、データ記録装置20の要求に応じて、メモリ436から情報を読み出し、アンテナコイル431を介してデータ記録装置20に送信する。例えば、データ記録装置20の要求に応じて、メモリ436の第2の記憶領域436Bからテンション調整情報を読み出し、アンテナコイル431を介してデータ記録装置20に送信する。
[カートリッジの構成例2]
図22は、2リールタイプのカートリッジ521の構成の一例を示す分解斜視図である。カートリッジ521は、合成樹脂製の上ハーフ502と、上ハーフ502の上面に開口された窓部502aに嵌合されて固着される透明な窓部材523と、上ハーフ502の内側に固着されリール506、507の浮き上がりを防止するリールホルダー522と、上ハーフ502に対応する下ハーフ505と、上ハーフ502と下ハーフ505を組み合わせてできる空間に収納されるリール506、507と、リール506、507に巻かれた磁気テープMT1と、上ハーフ502と下ハーフ505を組み合わせてできるフロント側開口部を閉蓋するフロントリッド509およびこのフロント側開口部に露出した磁気テープMT1を保護するバックリッド509Aとを備える。
図22は、2リールタイプのカートリッジ521の構成の一例を示す分解斜視図である。カートリッジ521は、合成樹脂製の上ハーフ502と、上ハーフ502の上面に開口された窓部502aに嵌合されて固着される透明な窓部材523と、上ハーフ502の内側に固着されリール506、507の浮き上がりを防止するリールホルダー522と、上ハーフ502に対応する下ハーフ505と、上ハーフ502と下ハーフ505を組み合わせてできる空間に収納されるリール506、507と、リール506、507に巻かれた磁気テープMT1と、上ハーフ502と下ハーフ505を組み合わせてできるフロント側開口部を閉蓋するフロントリッド509およびこのフロント側開口部に露出した磁気テープMT1を保護するバックリッド509Aとを備える。
リール506は、磁気テープMT1が巻かれる円筒状のハブ部506aを中央部に有する下フランジ506bと、下フランジ506bとほぼ同じ大きさの上フランジ506cと、ハブ部506aと上フランジ506cの間に挟み込まれたリールプレート511とを備える。リール507はリール506と同様の構成を有している。
窓部材523には、リール506、507に対応した位置に、これらリールの浮き上がりを防止するリール保持手段であるリールホルダー522を組み付けるための取付孔523aが各々設けられている。磁気テープMT1は、上述した本実施形態における磁気記録媒体1と同様に構成される。
なお、本技術は以下のような構成もとることができる。
(1) サーボ信号が記録されるサーボバンドを有する磁性層を具備するテープ状の磁気記録媒体であって、
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標が0.42以上である
磁気記録媒体。
(2)上記(1)に記載の磁気記録媒体であって、
前記指標は、0.45以上である
磁気記録媒体。
(3)上記(1)に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.5以上である
磁気記録媒体。
(4)上記(3)に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.6以上である
磁気記録媒体。
(5)上記(1)に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.6以上である
磁気記録媒体。
(6)上記(5)に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.7以上である
磁気記録媒体。
(7)上記(1)に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.39以上である
磁気記録媒体。
(8)上記(7)に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.45以上である
磁気記録媒体。
(9)上記(1)~(8)のいずれか1つに記載の磁気記録媒体であって、
前記サーボ信号は、テープ幅方向に対して所定のアジマス角を持って傾斜する複数のストライプを含むサーボ信号記録パターンである
磁気記録媒体。
(10)上記(1)~(9)のいずれか1つに記載の磁気記録媒体であって、
前記磁性層は、六方晶フェライト、ε酸化鉄、又はコバルトフェライトの磁性粉のいずれかを含む
磁気記録媒体。
(11)上記(1)~(10)のいずれか1つに記載の磁気記録媒体であって、
前記磁性層を支持する基材と、前記基材の一方の主面と前記磁性層との間に設けられた非磁性層とをさらに具備する
磁気記録媒体。
(12)上記(1)~(11)のいずれか1つに記載の磁気記録媒体であって、
前記基材の他方の主面に設けられたバック層をさらに具備する
磁気記録媒体。
(13)上記(1)~(12)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.6μm以下である
磁気記録媒体。
(14)上記(1)~(13)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.4μm以下である
磁気記録媒体。
(15)上記(1)~(14)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.2μm以下である
磁気記録媒体。
(16)上記(1)~(15)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.0μm以下である
磁気記録媒体。
(17)上記(1)~(16)のいずれか1つに記載の磁気記録媒体であって、
前記非磁性層の平均厚みは、0.6μm以上2.0μm以下である
磁気記録媒体。
(18) サーボバンドを有する磁性層を備えたテープ状の磁気記録媒体にサーボ信号を記録する装置であって、
前記サーボバンドにサーボ信号を記録するサーボライトヘッドと、
前記磁性層を挟んで前記サーボライトヘッドに対向して配置され、軟磁性材料で構成された補助磁極と
を具備するサーボ信号記録装置。
(19)サーボ信号が記録されるサーボバンドを有する磁性層を有するテープ状の磁気記録媒体を具備し、
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標が0.42以上である
カートリッジ。
(1) サーボ信号が記録されるサーボバンドを有する磁性層を具備するテープ状の磁気記録媒体であって、
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標が0.42以上である
磁気記録媒体。
(2)上記(1)に記載の磁気記録媒体であって、
前記指標は、0.45以上である
磁気記録媒体。
(3)上記(1)に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.5以上である
磁気記録媒体。
(4)上記(3)に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.6以上である
磁気記録媒体。
(5)上記(1)に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.6以上である
磁気記録媒体。
(6)上記(5)に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.7以上である
磁気記録媒体。
(7)上記(1)に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.39以上である
磁気記録媒体。
(8)上記(7)に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.45以上である
磁気記録媒体。
(9)上記(1)~(8)のいずれか1つに記載の磁気記録媒体であって、
前記サーボ信号は、テープ幅方向に対して所定のアジマス角を持って傾斜する複数のストライプを含むサーボ信号記録パターンである
磁気記録媒体。
(10)上記(1)~(9)のいずれか1つに記載の磁気記録媒体であって、
前記磁性層は、六方晶フェライト、ε酸化鉄、又はコバルトフェライトの磁性粉のいずれかを含む
磁気記録媒体。
(11)上記(1)~(10)のいずれか1つに記載の磁気記録媒体であって、
前記磁性層を支持する基材と、前記基材の一方の主面と前記磁性層との間に設けられた非磁性層とをさらに具備する
磁気記録媒体。
(12)上記(1)~(11)のいずれか1つに記載の磁気記録媒体であって、
前記基材の他方の主面に設けられたバック層をさらに具備する
磁気記録媒体。
(13)上記(1)~(12)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.6μm以下である
磁気記録媒体。
(14)上記(1)~(13)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.4μm以下である
磁気記録媒体。
(15)上記(1)~(14)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.2μm以下である
磁気記録媒体。
(16)上記(1)~(15)のいずれか1つに記載の磁気記録媒体であって、
前記磁気記録媒体の平均厚みは、5.0μm以下である
磁気記録媒体。
(17)上記(1)~(16)のいずれか1つに記載の磁気記録媒体であって、
前記非磁性層の平均厚みは、0.6μm以上2.0μm以下である
磁気記録媒体。
(18) サーボバンドを有する磁性層を備えたテープ状の磁気記録媒体にサーボ信号を記録する装置であって、
前記サーボバンドにサーボ信号を記録するサーボライトヘッドと、
前記磁性層を挟んで前記サーボライトヘッドに対向して配置され、軟磁性材料で構成された補助磁極と
を具備するサーボ信号記録装置。
(19)サーボ信号が記録されるサーボバンドを有する磁性層を有するテープ状の磁気記録媒体を具備し、
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標が0.42以上である
カートリッジ。
1…磁気記録媒体
5…記録トラック
6…サーボ信号記録パターン
7…ストライプ
11…基材
12…非磁性層
13…磁性層
14…バック層
200…サーボ信号記録装置
210…サーボライトヘッド
220…補助磁極
d…データバンド
s…サーボバンド
5…記録トラック
6…サーボ信号記録パターン
7…ストライプ
11…基材
12…非磁性層
13…磁性層
14…バック層
200…サーボ信号記録装置
210…サーボライトヘッド
220…補助磁極
d…データバンド
s…サーボバンド
Claims (11)
- サーボ信号が記録されるサーボバンドを有する磁性層を具備するテープ状の磁気記録媒体であって、
前記磁性層の垂直方向の角形比をSq、前記磁性層にサーボ信号を飽和記録させたときに磁気力顕微鏡で観察される第1の磁気力勾配強度のpeak-to-peak値をF0(p-p)、前記サーボバンドに記録されたサーボ信号についての磁気力顕微鏡で観察される第2の磁気力勾配強度のpeak-to-peak値をFact.(p-p)としたとき、
Sq×Fact.(p-p)/F0(p-p)
で表される指標が0.42以上である
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
前記指標は、0.45以上である
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.5以上である
磁気記録媒体。 - 請求項3に記載の磁気記録媒体であって、
前記磁性層の垂直方向の角形比(Sq)は、0.6以上である
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.6以上である
磁気記録媒体。 - 請求項5に記載の磁気記録媒体であって、
F0(p-p)に対するFact.(p-p)の比(Fact.(p-p)/F0(p-p))は、0.7以上である
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.39以上である
磁気記録媒体。 - 請求項7に記載の磁気記録媒体であって、
前記磁性層の残留磁化(Mrt)は、0.45以上である
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
前記サーボ信号は、テープ幅方向に対して所定のアジマス角を持って傾斜する複数のストライプを含むサーボ信号記録パターンである
磁気記録媒体。 - 請求項1に記載の磁気記録媒体であって、
前記磁性層は、六方晶フェライト、ε酸化鉄、又はコバルトフェライトの磁性粉を含む
磁気記録媒体。 - サーボバンドを有する磁性層を備えたテープ状の磁気記録媒体にサーボ信号を記録する装置であって、
前記サーボバンドにサーボ信号を記録するサーボライトヘッドと、
前記磁性層を挟んで前記サーボライトヘッドに対向して配置され、軟磁性材料で構成された補助磁極と
を具備するサーボ信号記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023183843A JP7586266B2 (ja) | 2019-03-29 | 2023-10-26 | 磁気記録媒体 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019069206 | 2019-03-29 | ||
| JP2019069206 | 2019-03-29 | ||
| PCT/JP2020/014055 WO2020203785A1 (ja) | 2019-03-29 | 2020-03-27 | 磁気記録媒体及びサーボ信号記録装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023183843A Division JP7586266B2 (ja) | 2019-03-29 | 2023-10-26 | 磁気記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020203785A1 JPWO2020203785A1 (ja) | 2020-10-08 |
| JP7375813B2 true JP7375813B2 (ja) | 2023-11-08 |
Family
ID=72668441
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021512009A Active JP7375813B2 (ja) | 2019-03-29 | 2020-03-27 | 磁気記録媒体及びサーボ信号記録装置 |
| JP2023183843A Active JP7586266B2 (ja) | 2019-03-29 | 2023-10-26 | 磁気記録媒体 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023183843A Active JP7586266B2 (ja) | 2019-03-29 | 2023-10-26 | 磁気記録媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11862212B2 (ja) |
| JP (2) | JP7375813B2 (ja) |
| DE (1) | DE112020001677T5 (ja) |
| WO (1) | WO2020203785A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7377182B2 (ja) * | 2020-09-25 | 2023-11-09 | 富士フイルム株式会社 | 磁気記録ヘッドおよびその製造方法、磁気記録装置ならびに磁気記録媒体の製造方法 |
| JP7406648B2 (ja) * | 2020-09-30 | 2023-12-27 | 富士フイルム株式会社 | 磁気記録媒体、磁気テープカートリッジおよび磁気記録再生装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009037700A (ja) | 2007-08-02 | 2009-02-19 | Hitachi Maxell Ltd | 磁気記録媒体 |
| JP2017224365A (ja) | 2016-06-13 | 2017-12-21 | 富士フイルム株式会社 | 磁気テープおよび磁気テープ装置 |
| JP2018005970A (ja) | 2013-03-15 | 2018-01-11 | ソニー株式会社 | 磁気記録媒体、サーボ信号記録装置及び磁気記録媒体の製造方法 |
| JP2018073454A (ja) | 2011-06-13 | 2018-05-10 | ソニー株式会社 | 垂直異方性を有する磁気記録媒体のサーボ書き込み |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4085430A (en) * | 1974-01-24 | 1978-04-18 | U.S. Philips Corporation | Thin film magnetic head with a gap formed between a loop shaped core part and a bridging core part |
| US7800862B1 (en) * | 2004-02-18 | 2010-09-21 | Advanced Research Corporation | Magnetic recording head having secondary sub-gaps |
| JP6206252B2 (ja) | 2013-03-15 | 2017-10-04 | ソニー株式会社 | 磁気記録媒体、サーボ信号記録装置及び磁気記録媒体の製造方法 |
| WO2019159464A1 (ja) * | 2018-02-16 | 2019-08-22 | ソニー株式会社 | 磁気記録媒体及びカートリッジ |
| JP7255674B2 (ja) * | 2019-03-29 | 2023-04-11 | ソニーグループ株式会社 | データ再生装置 |
-
2020
- 2020-03-27 WO PCT/JP2020/014055 patent/WO2020203785A1/ja not_active Ceased
- 2020-03-27 US US17/599,843 patent/US11862212B2/en active Active
- 2020-03-27 JP JP2021512009A patent/JP7375813B2/ja active Active
- 2020-03-27 DE DE112020001677.3T patent/DE112020001677T5/de active Pending
-
2023
- 2023-10-26 JP JP2023183843A patent/JP7586266B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009037700A (ja) | 2007-08-02 | 2009-02-19 | Hitachi Maxell Ltd | 磁気記録媒体 |
| JP2018073454A (ja) | 2011-06-13 | 2018-05-10 | ソニー株式会社 | 垂直異方性を有する磁気記録媒体のサーボ書き込み |
| JP2018005970A (ja) | 2013-03-15 | 2018-01-11 | ソニー株式会社 | 磁気記録媒体、サーボ信号記録装置及び磁気記録媒体の製造方法 |
| JP2017224365A (ja) | 2016-06-13 | 2017-12-21 | 富士フイルム株式会社 | 磁気テープおよび磁気テープ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020203785A1 (ja) | 2020-10-08 |
| WO2020203785A1 (ja) | 2020-10-08 |
| DE112020001677T5 (de) | 2022-01-13 |
| JP2023175039A (ja) | 2023-12-08 |
| JP7586266B2 (ja) | 2024-11-19 |
| US11862212B2 (en) | 2024-01-02 |
| US20220189506A1 (en) | 2022-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6750752B1 (ja) | 磁気記録媒体 | |
| JP6729827B2 (ja) | 磁気記録媒体 | |
| JP6610824B1 (ja) | カートリッジおよびカートリッジメモリ | |
| JP7247954B2 (ja) | 磁気記録媒体及びカートリッジ | |
| JP7375702B2 (ja) | 磁気記録媒体 | |
| WO2019159466A1 (ja) | 磁気記録媒体 | |
| JP6635224B1 (ja) | 磁気記録媒体 | |
| JP7586266B2 (ja) | 磁気記録媒体 | |
| US11830532B2 (en) | Magnetic recording medium including magnetic layer having magnetic powder, magnetic recording/reproducing device, and magnetic recording medium cartridge | |
| JP7521398B2 (ja) | 磁気記録媒体 | |
| JP6733801B1 (ja) | 磁気記録媒体 | |
| US11581014B2 (en) | Magnetic recording medium | |
| JP6741140B1 (ja) | 磁気記録媒体およびカートリッジ | |
| JP7563148B2 (ja) | 磁気記録媒体、磁気記録再生装置および磁気記録媒体カートリッジ | |
| JP7358965B2 (ja) | 磁気記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231009 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7375813 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |