JP7366935B2 - ガス滅菌に対応可能な駆動機構 - Google Patents
ガス滅菌に対応可能な駆動機構 Download PDFInfo
- Publication number
- JP7366935B2 JP7366935B2 JP2020565616A JP2020565616A JP7366935B2 JP 7366935 B2 JP7366935 B2 JP 7366935B2 JP 2020565616 A JP2020565616 A JP 2020565616A JP 2020565616 A JP2020565616 A JP 2020565616A JP 7366935 B2 JP7366935 B2 JP 7366935B2
- Authority
- JP
- Japan
- Prior art keywords
- partition wall
- magnet unit
- moving block
- unit
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 101
- 230000001954 sterilising effect Effects 0.000 title description 25
- 238000004659 sterilization and disinfection Methods 0.000 title description 17
- 238000005192 partition Methods 0.000 claims description 69
- 230000008878 coupling Effects 0.000 claims description 27
- 238000010168 coupling process Methods 0.000 claims description 27
- 238000005859 coupling reaction Methods 0.000 claims description 27
- 239000001963 growth medium Substances 0.000 claims description 23
- 238000005096 rolling process Methods 0.000 claims description 11
- 230000033001 locomotion Effects 0.000 claims description 10
- 239000000463 material Substances 0.000 claims description 9
- 238000005260 corrosion Methods 0.000 claims description 6
- 230000007797 corrosion Effects 0.000 claims description 6
- 210000004748 cultured cell Anatomy 0.000 claims description 4
- 238000004320 controlled atmosphere Methods 0.000 claims 6
- 238000002347 injection Methods 0.000 description 48
- 239000007924 injection Substances 0.000 description 48
- 239000007789 gas Substances 0.000 description 31
- MHAJPDPJQMAIIY-UHFFFAOYSA-N Hydrogen peroxide Chemical compound OO MHAJPDPJQMAIIY-UHFFFAOYSA-N 0.000 description 20
- 238000003466 welding Methods 0.000 description 19
- 238000007789 sealing Methods 0.000 description 17
- 230000003028 elevating effect Effects 0.000 description 13
- 239000000243 solution Substances 0.000 description 13
- 238000009826 distribution Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 239000002609 medium Substances 0.000 description 10
- 238000003860 storage Methods 0.000 description 10
- 210000004027 cell Anatomy 0.000 description 6
- 238000010438 heat treatment Methods 0.000 description 6
- 230000001590 oxidative effect Effects 0.000 description 6
- 238000001179 sorption measurement Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 238000012856 packing Methods 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 4
- 238000011109 contamination Methods 0.000 description 3
- 229910001172 neodymium magnet Inorganic materials 0.000 description 3
- 238000010899 nucleation Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 239000002245 particle Substances 0.000 description 3
- 229910000938 samarium–cobalt magnet Inorganic materials 0.000 description 3
- 238000011282 treatment Methods 0.000 description 3
- 241000282472 Canis lupus familiaris Species 0.000 description 2
- 239000004696 Poly ether ether ketone Substances 0.000 description 2
- 239000004734 Polyphenylene sulfide Substances 0.000 description 2
- 244000052616 bacterial pathogen Species 0.000 description 2
- 238000004113 cell culture Methods 0.000 description 2
- 230000003749 cleanliness Effects 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 229920002530 polyetherether ketone Polymers 0.000 description 2
- 229920000069 polyphenylene sulfide Polymers 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 229920000181 Ethylene propylene rubber Polymers 0.000 description 1
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- 229920000459 Nitrile rubber Polymers 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 229920000800 acrylic rubber Polymers 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000003153 chemical reaction reagent Substances 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 238000012864 cross contamination Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000007876 drug discovery Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229920006351 engineering plastic Polymers 0.000 description 1
- HDERJYVLTPVNRI-UHFFFAOYSA-N ethene;ethenyl acetate Chemical group C=C.CC(=O)OC=C HDERJYVLTPVNRI-UHFFFAOYSA-N 0.000 description 1
- 229920001973 fluoroelastomer Polymers 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 229920003223 poly(pyromellitimide-1,4-diphenyl ether) Polymers 0.000 description 1
- 229920000058 polyacrylate Polymers 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- 229920005992 thermoplastic resin Polymers 0.000 description 1
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G54/00—Non-mechanical conveyors not otherwise provided for
- B65G54/02—Non-mechanical conveyors not otherwise provided for electrostatic, electric, or magnetic
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M33/00—Means for introduction, transport, positioning, extraction, harvesting, peeling or sampling of biological material in or from the apparatus
- C12M33/04—Means for introduction, transport, positioning, extraction, harvesting, peeling or sampling of biological material in or from the apparatus by injection or suction, e.g. using pipettes, syringes, needles
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M1/00—Apparatus for enzymology or microbiology
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M23/00—Constructional details, e.g. recesses, hinges
- C12M23/50—Means for positioning or orientating the apparatus
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M3/00—Tissue, human, animal or plant cell, or virus culture apparatus
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M37/00—Means for sterilizing, maintaining sterile conditions or avoiding chemical or biological contamination
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Chemical & Material Sciences (AREA)
- Wood Science & Technology (AREA)
- Organic Chemistry (AREA)
- Zoology (AREA)
- Biomedical Technology (AREA)
- Biotechnology (AREA)
- Genetics & Genomics (AREA)
- Microbiology (AREA)
- Biochemistry (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Sustainable Development (AREA)
- Molecular Biology (AREA)
- Cell Biology (AREA)
- Virology (AREA)
- Medicinal Chemistry (AREA)
- Clinical Laboratory Science (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
Description
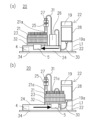
容器ラック23が所定の位置まで達すると、第一の容器昇降ユニット47aが作動して、容器ラック23の右端に収容されている小分け容器21(第一の小分け容器21-1)を上昇移動させる。第一の容器昇降ユニット47aによって所定の位置まで上昇移動させられた第一の小分け容器21-1は、第一の注入口保持ユニット49aによって注入口21aが所定の高さとなる位置に保持される。注入口21aが注入口保持ユニット49によって保持されると、ノズル昇降ユニット27が作動してノズル25が注入口21aに挿入されて、第一の小分け容器21-1の内部に培地が供給される。培地の供給が終了すると、ノズル25が注入口21aから取り出されて、注入口保持ユニット49による注入口21aの保持が解除される。その後、第一の小分け容器21-1は容器昇降ユニット47aが下降することによって容器ラック23へと戻される。
Claims (9)
- 無菌雰囲気及び/又は腐食性雰囲気の管理雰囲気環境下に設けられる駆動機構であって、
腐食耐性を有する材料からなり、前記管理雰囲気環境の内部に設けられて該管理雰囲気環境から隔絶された内部空間を形成する駆動方向に垂直な断面が多角形状の隔壁と、
前記隔壁の内側である前記内部空間内に設けられる移動ブロックと、
前記内部空間内に設けられて、前記移動ブロックを移動させる駆動部と、
前記内部空間内に設けられて、前記移動ブロックを所定の方向に案内する案内機構と、
前記隔壁の外側であって前記隔壁を介して前記移動ブロックと対向する位置に、前記隔壁の少なくとも一部を覆い、前記隔壁に沿って移動可能に設けられた移動台と、
前記案内機構とは反対側の位置で、前記隔壁を介して互いに対向する前記移動ブロックと前記移動台の各面(第一の面)のそれぞれに、互いに引き合う磁石を備える第一のマグネットカップリング機構と、
前記第一の面と直交する面であって、前記隔壁を介して互いに対向する前記移動ブロックと前記移動台の1対の面のいずれか1組の面(第二の面)のそれぞれに、互いに引き合う磁石を備える第二のマグネットカップリング機構と、
前記移動ブロックと前記移動台の前記第一の面及び前記第二の面とは異なる面(第三の面)であって、前記移動ブロックと前記移動台の前記隔壁を介して互いに対向する各面の少なくとも1組の面に、前記第一及び/または第二のマグネットカップリング機構の吸着力を補強する方向に互いに反発する磁極を設けた付勢磁石ユニットと、
を備え、
前記移動台は、前記移動ブロックの移動に追従して前記隔壁に沿って移動する、
ことを特徴とする駆動機構。 - 前記移動ブロックと前記移動台の前記付勢磁石ユニットが配置される前記第三の面は、前記第二のマグネットカップリングが配置される前記第二の面に対して所定の角度をもって傾いて配置されていることを特徴とする請求項1に記載の駆動機構。
- 前記第一のマグネットカップリング機構と前記第二のマグネットカップリング機構を構成する磁石は永久磁石であることを特徴とする請求項1又は2に記載の駆動機構。
- 前記第一のマグネットカップリング機構と前記第二のマグネットカップリング機構を構成する磁石は永久磁石又は電磁石であることを特徴とする請求項1又は2に記載の駆動機構。
- 請求項1から請求項4のいずれか1項に記載の駆動機構を備える分配装置。
- 請求項1から請求項4のいずれか1項に記載の駆動機構を備える分注装置。
- 請求項1から請求項4のいずれか1項に記載の駆動機構を備える培地交換装置。
- 請求項1から請求項4のいずれか一項に記載の駆動機構を備える培養細胞取扱装置。
- 無菌雰囲気及び/又は腐食性雰囲気の管理雰囲気環境下に設けられる駆動機構であって、
腐食耐性を有する材料からなり、前記管理雰囲気環境の内部に設けられて該管理雰囲気環境から隔絶された内部空間を形成する駆動方向に垂直な断面が多角形状の隔壁と、
前記隔壁の内側である前記内部空間内に設けられる移動ブロックと、
前記内部空間内に設けられて、前記移動ブロックを移動させる駆動部と、
前記内部空間内に設けられて、前記移動ブロックを所定の方向に案内する案内機構と、
前記隔壁の外側の前記移動ブロックと対向する位置に、前記隔壁を覆い該隔壁に沿って移動可能に設けられた略コの字状の移動台と、
を備えており、
前記移動ブロックの前記案内機構に面する側と反対側の面である第一の面に、第一の駆動磁石ユニット(Mg1)を配置し、
前記移動ブロックの前記第一の面に直交する面の一つ(第二の面)に、第二の駆動磁石ユニット(Mg3)を配置し、
前記移動ブロック中の前記第二の駆動磁石が配置された面の反対側の面(第三の面)に、第一の付勢磁石ユニット(Mg5)を配置し、
前記移動台の、前記第一の駆動磁石ユニット(Mg1)に対向する面に、第一の従動磁石ユニット(Mg2)を配置し、
前記移動台の、前記第二の駆動磁石ユニット(Mg3)に対向する面に、第二の従動磁石ユニット(Mg4)を配置し、
前記移動台の、前記移動ブロックの前記第一の付勢磁石ユニット(Mg5)に対向する面に、第二の付勢磁石ユニット(Mg6)を配置し、
前記移動台の前記第一の従動磁石ユニット(Mg2)が配置される面と前記第二の従動磁石ユニット(Mg4)が配置される面に、転動体を転動可能に設け、
前記第一の駆動磁石ユニット(Mg1)と前記第一の従動磁石ユニット(Mg2)、及び前記第二の駆動磁石ユニット(Mg3)と前記第二の従動磁石ユニット(Mg4)とは、互いに引き付けるよう配置され、
前記第一の付勢磁石ユニット(Mg5)と前記第二の付勢磁石ユニット(Mg6)とは、互いに反発するよう配置され、
前記移動台は、前記移動ブロックの移動に追従して前記隔壁に沿って移動する、
ことを特徴とする駆動機構。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019003801 | 2019-01-11 | ||
| JP2019003801 | 2019-01-11 | ||
| PCT/JP2019/046623 WO2020144968A1 (ja) | 2019-01-11 | 2019-11-28 | ガス滅菌に対応可能な駆動機構 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2020144968A1 JPWO2020144968A1 (ja) | 2021-11-25 |
| JPWO2020144968A5 JPWO2020144968A5 (ja) | 2022-10-06 |
| JP7366935B2 true JP7366935B2 (ja) | 2023-10-23 |
Family
ID=71521126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020565616A Active JP7366935B2 (ja) | 2019-01-11 | 2019-11-28 | ガス滅菌に対応可能な駆動機構 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11634287B2 (ja) |
| JP (1) | JP7366935B2 (ja) |
| CN (1) | CN113166693B (ja) |
| WO (1) | WO2020144968A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4108610A1 (de) * | 2021-06-24 | 2022-12-28 | Schneider Electric Industries SAS | Linearmotorsystem und verfahren zum betreiben eines solchen |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010001873A1 (ja) | 2008-07-01 | 2010-01-07 | ローツェ株式会社 | 恒温装置 |
| WO2012173074A2 (ja) | 2011-06-14 | 2012-12-20 | ローツェ株式会社 | 回転する試料テーブルを備える恒温装置 |
| JP2013128462A (ja) | 2011-12-22 | 2013-07-04 | Sanyo Electric Co Ltd | 分注システム、アイソレータ |
| JP2016533189A (ja) | 2013-09-20 | 2016-10-27 | アジエンダ オスペダリエロ−ウニベルシタリア ピサーナ | 鼓膜の生体模倣組織補綴物を調製するための装置およびプロセス |
| WO2017126535A1 (ja) | 2016-01-18 | 2017-07-27 | 株式会社ExH | 運搬機器、コネクタ |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0773492B2 (ja) * | 1989-12-25 | 1995-08-09 | 株式会社日立製作所 | 生物細胞の通気培養方法及び通気ガス噴出装置及び通気培養装置 |
| JPH06191635A (ja) * | 1992-04-28 | 1994-07-12 | Sandvik Kk | 物品仕分け装置 |
| JP3351240B2 (ja) * | 1996-05-30 | 2002-11-25 | 松下電工株式会社 | リニアモータ |
| JP3372434B2 (ja) * | 1996-11-19 | 2003-02-04 | 三菱重工業株式会社 | 壁面吸着式移動装置 |
| CN1246424A (zh) * | 1998-08-28 | 2000-03-08 | 乔占领 | 磁气联合全悬浮列车 |
| AU2005284802A1 (en) * | 2004-09-15 | 2006-03-23 | Thomas Industries, Inc | Orbiting valve for a reciprocating pump |
| US7131528B1 (en) * | 2005-08-30 | 2006-11-07 | Homag Holzbearbeitungssysteme Ag | Chain guide for a continuous running transport chain |
| JPWO2008075616A1 (ja) * | 2006-12-20 | 2010-04-08 | 株式会社相模化学金属 | 永久磁石を利用した走行装置 |
| JP5376982B2 (ja) * | 2008-06-30 | 2013-12-25 | キヤノン株式会社 | 機械電気変換素子と機械電気変換装置および機械電気変換装置の作製方法 |
| BR112012005142A2 (pt) * | 2009-09-11 | 2019-09-24 | Koninl Philips Electronics Nv | dispositivo para o transporte de ésferas magnéticas ou magnetizáveis sobre uma superfície de transporte, método para o transporte de esferas magnéticas ou magnetizáveis sogre um superfície de transporte ou aparelho microfluídico |
| KR20110073968A (ko) * | 2009-12-24 | 2011-06-30 | 강윤진 | 자기부상을 이용한 가이드장치 |
| JP5940797B2 (ja) * | 2011-11-09 | 2016-06-29 | ローム株式会社 | 半導体ウエハ検査装置 |
| JP6156716B2 (ja) * | 2012-08-21 | 2017-07-05 | シンフォニアテクノロジー株式会社 | 搬送装置 |
| CN103305412A (zh) * | 2013-05-31 | 2013-09-18 | 广州安必平自动化检测设备有限公司 | 全自动核酸提取仪 |
| WO2016190312A1 (ja) * | 2015-05-25 | 2016-12-01 | ニプロ株式会社 | 培養装置 |
| JP2021016206A (ja) * | 2018-02-19 | 2021-02-12 | 株式会社ExH | 電力供給システム、配置方法 |
| CN107574120B (zh) * | 2017-10-27 | 2020-11-27 | 深圳大学 | 基于磁动力切换恒温区的荧光定量pcr检测系统及方法 |
| US20210016206A1 (en) * | 2019-07-18 | 2021-01-21 | Casey William Field | Modular filtration system |
-
2019
- 2019-11-28 CN CN201980077835.8A patent/CN113166693B/zh active Active
- 2019-11-28 JP JP2020565616A patent/JP7366935B2/ja active Active
- 2019-11-28 WO PCT/JP2019/046623 patent/WO2020144968A1/ja active Application Filing
-
2021
- 2021-07-07 US US17/369,907 patent/US11634287B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010001873A1 (ja) | 2008-07-01 | 2010-01-07 | ローツェ株式会社 | 恒温装置 |
| WO2012173074A2 (ja) | 2011-06-14 | 2012-12-20 | ローツェ株式会社 | 回転する試料テーブルを備える恒温装置 |
| JP2013128462A (ja) | 2011-12-22 | 2013-07-04 | Sanyo Electric Co Ltd | 分注システム、アイソレータ |
| JP2016533189A (ja) | 2013-09-20 | 2016-10-27 | アジエンダ オスペダリエロ−ウニベルシタリア ピサーナ | 鼓膜の生体模倣組織補綴物を調製するための装置およびプロセス |
| WO2017126535A1 (ja) | 2016-01-18 | 2017-07-27 | 株式会社ExH | 運搬機器、コネクタ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220033201A1 (en) | 2022-02-03 |
| CN113166693B (zh) | 2024-08-23 |
| CN113166693A (zh) | 2021-07-23 |
| WO2020144968A1 (ja) | 2020-07-16 |
| US11634287B2 (en) | 2023-04-25 |
| JPWO2020144968A1 (ja) | 2021-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20180072446A1 (en) | Apparatus and method for asepticaly filling pharmaceutical containers with a pharmaceutical fluid using rotary stage | |
| US11624048B2 (en) | Switching valve and suction-discharge device including the same | |
| US20140087455A1 (en) | Cell Culture Device and Transport Device | |
| EP2292728B1 (en) | Constant-temperature equipment | |
| JP5711965B2 (ja) | 恒温装置 | |
| US10524980B2 (en) | Apparatus and method for aseptically filling pharmaceutical containers with a pharmaceutical fluid using rotary stage | |
| US10723497B2 (en) | Apparatus and method for monitoring and controlling the filling of a container with a pharmaceutical fluid in an aseptic environment | |
| KR102520045B1 (ko) | 무균 환경에서 컨테이너를 유체 의약으로 충전하는 것을 모니터링하고 제어하기 위한 장치 및 방법 | |
| US10647955B2 (en) | Cell culture system | |
| JP2012130297A (ja) | 細胞培養装置 | |
| JP7366935B2 (ja) | ガス滅菌に対応可能な駆動機構 | |
| JP5814594B2 (ja) | 細胞培養装置 | |
| JP2003093040A (ja) | 生物試料観察装置及び方法 | |
| JP2022531448A (ja) | 雰囲気が制御される処理チャンバを自動管理するための装置及び方法 | |
| KR20210020552A (ko) | 인공피부 제조장치 및 마이크로 플레이트 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220928 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231005 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7366935 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |