JP7364540B2 - 画像処理システム - Google Patents
画像処理システム Download PDFInfo
- Publication number
- JP7364540B2 JP7364540B2 JP2020132779A JP2020132779A JP7364540B2 JP 7364540 B2 JP7364540 B2 JP 7364540B2 JP 2020132779 A JP2020132779 A JP 2020132779A JP 2020132779 A JP2020132779 A JP 2020132779A JP 7364540 B2 JP7364540 B2 JP 7364540B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- simulated
- calculation unit
- processing system
- dimensional shape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 70
- 238000001514 detection method Methods 0.000 claims description 93
- 238000004364 calculation method Methods 0.000 claims description 49
- 238000005259 measurement Methods 0.000 claims description 49
- 238000012937 correction Methods 0.000 claims description 45
- 239000011163 secondary particle Substances 0.000 claims description 37
- 238000003860 storage Methods 0.000 claims description 36
- 239000002245 particle Substances 0.000 claims description 23
- 230000008859 change Effects 0.000 claims description 21
- 238000009826 distribution Methods 0.000 claims description 12
- 230000003321 amplification Effects 0.000 claims description 2
- 238000003199 nucleic acid amplification method Methods 0.000 claims description 2
- 238000001878 scanning electron micrograph Methods 0.000 description 279
- 238000000034 method Methods 0.000 description 56
- 238000010586 diagram Methods 0.000 description 31
- 238000010894 electron beam technology Methods 0.000 description 22
- 230000003287 optical effect Effects 0.000 description 21
- 239000004065 semiconductor Substances 0.000 description 21
- 230000035945 sensitivity Effects 0.000 description 18
- 238000004458 analytical method Methods 0.000 description 9
- 238000003825 pressing Methods 0.000 description 9
- 238000004088 simulation Methods 0.000 description 9
- 238000000342 Monte Carlo simulation Methods 0.000 description 7
- 235000012431 wafers Nutrition 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 238000009966 trimming Methods 0.000 description 6
- 125000003821 2-(trimethylsilyl)ethoxymethyl group Chemical group [H]C([H])([H])[Si](C([H])([H])[H])(C([H])([H])[H])C([H])([H])C(OC([H])([H])[*])([H])[H] 0.000 description 5
- 230000014509 gene expression Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 238000004626 scanning electron microscopy Methods 0.000 description 5
- 238000012549 training Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 238000013528 artificial neural network Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 3
- 238000013527 convolutional neural network Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005669 field effect Effects 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000013434 data augmentation Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 229910052681 coesite Inorganic materials 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 229910052906 cristobalite Inorganic materials 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000011158 quantitative evaluation Methods 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 229910052682 stishovite Inorganic materials 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 229910052905 tridymite Inorganic materials 0.000 description 1
Images




































































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/22—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material
- G01N23/225—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material using electron or ion
- G01N23/2251—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material using electron or ion using incident electron beams, e.g. scanning electron microscopy [SEM]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/22—Optical, image processing or photographic arrangements associated with the tube
- H01J37/222—Image processing arrangements associated with the tube
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B15/00—Measuring arrangements characterised by the use of electromagnetic waves or particle radiation, e.g. by the use of microwaves, X-rays, gamma rays or electrons
- G01B15/04—Measuring arrangements characterised by the use of electromagnetic waves or particle radiation, e.g. by the use of microwaves, X-rays, gamma rays or electrons for measuring contours or curvatures
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70605—Workpiece metrology
- G03F7/70616—Monitoring the printed patterns
- G03F7/70625—Dimensions, e.g. line width, critical dimension [CD], profile, sidewall angle or edge roughness
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/529—Depth or shape recovery from texture
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/586—Depth or shape recovery from multiple images from multiple light sources, e.g. photometric stereo
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/30—Accessories, mechanical or electrical features
- G01N2223/303—Accessories, mechanical or electrical features calibrating, standardising
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/40—Imaging
- G01N2223/401—Imaging image processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/60—Specific applications or type of materials
- G01N2223/611—Specific applications or type of materials patterned objects; electronic devices
- G01N2223/6116—Specific applications or type of materials patterned objects; electronic devices semiconductor wafer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N7/00—Computing arrangements based on specific mathematical models
- G06N7/01—Probabilistic graphical models, e.g. probabilistic networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/24—Indexing scheme for image data processing or generation, in general involving graphical user interfaces [GUIs]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10056—Microscopic image
- G06T2207/10061—Microscopic image from scanning electron microscope
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30141—Printed circuit board [PCB]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30148—Semiconductor; IC; Wafer
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/22—Treatment of data
- H01J2237/221—Image processing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/22—Treatment of data
- H01J2237/226—Image reconstruction
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Software Systems (AREA)
- Mathematical Physics (AREA)
- Computing Systems (AREA)
- Molecular Biology (AREA)
- Evolutionary Computation (AREA)
- Data Mining & Analysis (AREA)
- Computational Linguistics (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Electromagnetism (AREA)
- Computer Graphics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Geometry (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Length-Measuring Devices Using Wave Or Particle Radiation (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Image Analysis (AREA)
Description
本開示の実施形態1においては、試料上に形成された構造物(半導体ウェーハの場合、ラインやドットのような凸パターン、ホールやトレンチのような凹パターン、など)や、試料(半導体ウェーハ)上に載った異物等に対し、これらを含んだ領域で取得したSEM画像から、画像の領域の高さマップを推定する。
本実施形態1に係る画像処理システム100は、校正用パターンのSEM画像を記憶装置に記憶し、演算装置で検出アクセプタンスを算出して複数の形状で模擬SEM画像を作成し、模擬SEM画像と対応する形状データを学習器で学習し、高さマップを推定したいパターンの実SEM画像を学習結果に入力することにより、SEM画像の高さマップを推定できる。
本開示の実施形態2では、走査電子顕微鏡300の別構成例を説明する。画像処理システム100の構成は実施形態1と同様である。実施形態1に記載され本実施形態2に未記載の事項は、特段の事情がない限り本実施形態2にも適用できる。
実施形態1では、演算装置102で作成した様々な形状と、前記形状に対応する模擬SEM画像の組からなるデータを教師データとした。しかし、模擬SEM画像を作成する際の、シミュレーションや解析的手法の精度が十分でない場合は、実測結果との乖離が生じる。さらに、検出アクセプタンスを校正用パターンのSEM画像から推測しているので、実際の装置の検出アクセプタンスから誤差が生じる可能性がある。このような課題を解決するための方法として、データ同化があげられる。データ同化は、シミュレーションでの誤差を実測結果によって修正する手法である。本開示の実施形態3では、データ同化を用いる例を説明する。画像処理システム100の構成は実施形態1と同様である。実施形態1~2に記載され本実施形態3に未記載の事項は、特段の事情がない限り、本実施形態3にも適用できる。
一般的に、機械学習では学習時に使用するデータセットは多い方が学習結果の精度が向上する可能性があると言われている。しかし、実際には学習に使用できるデータセット数は限られる。このように限られたデータセットにおいても有効に学習を進めるために、データ拡張(Data Augmentation)が行われる。データ拡張は元の学習データに変換を加えてデータ量を増やす技法で、画像処理分野における畳み込みニューラルネットワークのトレーニングに効果を発揮することが知られている。画像の変換手法としては、ノイズ増幅、ノイズ除去、コントラスト調整、トリミング、反転(左右/上下)や回転、シフト(水平/垂直)拡大縮小等が一般的に使われている。そこで本開示の実施形態4では、データ拡張の1例として、回転とトリミングについて説明する。画像処理システム100の構成は実施形態1と同様である。実施形態1~3に記載され本実施形態4に未記載の事項は、特段の事情がない限り本実施形態4にも適用できる。
走査電子顕微鏡を用いてSEM画像を取得したとき、一般に、画像を取得した条件が記載された付帯ファイルがSEM画像とともに保存される。付帯ファイルには、大きく分けて、装置自体に関する項目、光学条件に関する項目、画像取得条件に関する項目が記載されている。装置自体に関する項目としては、例えば、装置メーカ名、装置型番があげられる。光学条件に関する項目としては、例えば、照射エネルギー、照射電流量、装置内の電極電圧、集束レンズの電流量があげられる。これらの条件は光学モードとしてまとめた情報としても保存可能である。最後に、画像取得条件に関する項目としては、例えば、画像取得した検出器の名前、倍率、フレーム数、SEM画像のピクセル数、SEM画像の階調値補正方法があげられる。本開示の実施形態5では、形状パターンと画像との間の関係に加えて、これらと付帯情報との間の関係を併せて学習する例を説明する。実施形態1から実施形態4に記載され本実施形態に未記載の事項は、特段の事情がない限り本実施形態にも適用できる。
検出アクセプタンスは走査電子顕微鏡装置の固有の情報であり、一般にユーザには開示されていないので、ユーザは検出アクセプタンスを直接知ることができない。したがって、ユーザが自ら模擬SEM画像を作成し、走査電子顕微鏡を用いて取得したSEM画像を再現するためには、検出アクセプタンスを暗中模索で調べることが必要となる。実施形態1では、校正用パターンのSEM画像を記憶装置101に保存し、演算装置102で演算することによって検出アクセプタンスを推定し、模擬SEM画像を作成する。すなわち、ユーザが自ら検出アクセプタンスを探索する必要がない。
本開示の実施形態7では、校正用パターンのSEM画像105に代えて、検出器の形状を記述したデータを用いる例を説明する。実施形態1から実施形態6に記載され本実施形態に未記載の事項は、特段の事情がない限り本実施形態にも適用できる。
本開示は上記した実施形態に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施形態は本開示を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態の構成に置き換えることも可能であり、また、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
101…記憶装置
102…演算装置
103…学習器
104…出力装置
105…校正用パターンのSEM画像
106…推定対象のSEM画像
200…入力装置
301…電子ビーム
302…電子銃
303…集束レンズ
304…絞り
305…集束レンズ
306…ブランキング偏向器
307…ブランキング用電極
308…絞り
309…上方検出器
310…上走査偏向器
311…下走査偏向器
312、313…下方検出器
314…対物レンズ
315…試料
316…試料ステージ
317、318、319…2次粒子
320…制御装置
321…記録装置
Claims (15)
- 荷電粒子線装置が取得した試料の計測画像から前記試料の3次元形状を推定する画像処理システムであって、
前記荷電粒子線装置が前記試料に対して荷電粒子ビームを照射することにより前記試料から生じる2次粒子を検出する検出器の検出可能範囲を記憶する記憶部、
前記荷電粒子線装置が取得する1以上の3次元形状パターンの画像を前記検出可能範囲にしたがってシミュレートすることにより得られる模擬画像を出力する演算部、
前記1以上の3次元形状パターンと前記模擬画像との間の関係を学習する学習器、
前記計測画像を前記学習器に対して入力することにより前記学習器から得られる前記試料の3次元形状を出力する出力部、
を備える
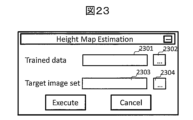
ことを特徴とする画像処理システム。 - 前記演算部は、3次元形状が既知である校正パターンの画像を用いて前記検出可能範囲を推定するように構成されており、
前記画像処理システムはさらに、前記校正パターンを入力するためのインターフェースを備え、
前記インターフェースは、前記校正パターンとして、
既定の形状パターンを列挙するリストのうちいずれか、
前記校正パターンを指定する形状パラメータ、
前記荷電粒子線装置とは異なる計測装置によって取得した形状パターン、
のうち少なくともいずれかを選択することができるように構成されており、
前記演算部は、前記インターフェースが受け取った前記校正パターンの画像を用いて前記検出可能範囲を推定する
ことを特徴とする請求項1記載の画像処理システム。 - 前記記憶部は、前記検出可能範囲を変化させることにより1つの3次元形状パターンから前記荷電粒子線装置が取得した、複数の推定用画像を記憶しており、
前記演算部は、前記荷電粒子線装置が取得した、3次元形状が既知である校正パターンの画像を、前記複数の推定用画像と比較することにより、前記荷電粒子線装置が前記校正パターンを取得したときにおける前記検出可能範囲を推定し、その推定結果を前記記憶部に格納する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記推定した検出可能範囲と、前記試料から放出される2次粒子のエネルギーと角度とをもとに、前記模擬画像を作成する
ことを特徴とする請求項3記載の画像処理システム。 - 前記画像処理システムはさらに、前記模擬画像の個数を入力するためのインターフェースを備え、
前記演算部は、前記インターフェースが受け取った個数よりも少ない前記模擬画像を一時的模擬画像として生成し、
前記演算部は、前記一時的模擬画像の形状を変化させたときにおける前記一時的模擬画像または前記一時的模擬画像の形状を変化させたときにおける前記一時的模擬画像の変動量を表す情報を計算し、前記インターフェースを介してその計算結果を提示する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、3次元形状が既知である校正パターンの画像を用いて前記検出可能範囲を推定するように構成されており、
前記画像処理システムはさらに、前記模擬画像の個数を入力するためのインターフェースを備え、
前記演算部は、前記インターフェースが受け取った個数よりも少ない前記模擬画像を一時的模擬画像として生成し、
前記演算部は、前記一時的模擬画像の形状を変化させたときにおける前記一時的模擬画像の変動量を表す情報を計算し、
前記演算部は、前記変動量が閾値未満である場合は、新たな検出可能範囲について前記変動量を表す情報を再計算する
ことを特徴とする請求項1記載の画像処理システム。 - 前記出力部は、前記試料の3次元形状を提示するインターフェースを備え、
前記インターフェースは、前記試料の3次元形状を視覚的に提示し、
前記演算部は、前記インターフェース上で指定された前記試料の3次元形状上の2点間の距離を計算して前記インターフェース上で提示する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記荷電粒子線装置が取得した補正用試料の前記3次元形状パターンの第1画像を取得し、
前記演算部は、前記荷電粒子線装置とは異なる計測装置が取得した前記補正用試料の高さ分布にしたがって前記補正用試料の前記3次元形状パターンの第2画像を生成し、
前記演算部は、前記第2画像を前記第1画像へ近づけるための補正係数を計算し、
前記演算部は、前記模擬画像に対して補正係数を適用し、
前記学習器は、前記補正係数を適用した前記模擬画像と、前記1以上の前記3次元形状パターンとの間の関係を学習し、
前記出力部は、前記計測画像を前記学習器に対して入力することにより前記学習器から得られる前記試料の3次元形状を出力する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記荷電粒子線装置が取得した補正用試料の前記3次元形状パターンの第1画像を取得し、
前記演算部は、前記荷電粒子線装置とは異なる計測装置が取得した前記補正用試料の高さ分布にしたがって前記補正用試料の前記3次元形状パターンの第2画像を生成し、
前記演算部は、前記第1画像を前記第2画像へ近づけるための補正係数を計算し、
前記学習器は、前記模擬画像と、前記1以上の前記3次元形状パターンとの間の関係を学習し、
前記演算部は、前記計測画像に対して前記補正係数を適用することにより補正後画像を取得し、
前記出力部は、前記補正後画像を前記学習器に対して入力することにより前記学習器から得られる前記試料の3次元形状を出力する
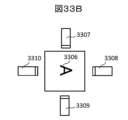
ことを特徴とする請求項1記載の画像処理システム。 - 前記荷電粒子線装置は、複数の前記検出器を備えており、
前記演算部は、前記荷電粒子線装置が前記試料の平坦面に対して前記荷電粒子ビームを照射したときにおける前記平坦面の画像を、前記検出器ごとに取得し、
前記演算部は、前記検出器ごとの画像間の差分を小さくする補正係数を計算し、
前記演算部は、前記検出器ごとに取得した画像に対してそれぞれ前記補正係数を適用することにより、前記模擬画像を生成し、
前記学習器は、前記補正係数を適用した前記模擬画像と、前記1以上の前記3次元形状パターンとの間の関係を学習し、
前記演算部は、前記計測画像に対して前記補正係数を適用することにより補正後画像を取得し、
前記出力部は、前記補正後画像を前記学習器に対して入力することにより前記学習器から得られる前記試料の3次元形状を出力する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記模擬画像に対して、
ノイズ増幅、ノイズ除去、コントラスト調整、トリミング、左右反転、上下反転、回転、シフト、拡大、縮小、
のうち少なくともいずれかを適用することにより、前記模擬画像を変形した拡張模擬画像を生成し、
前記学習器は、前記模擬画像と前記1以上の3次元形状パターンとの間の関係に加えて、前記拡張模擬画像と前記1以上の3次元形状パターンとの間の関係を学習する
ことを特徴とする請求項1記載の画像処理システム。 - 前記学習器は、前記1以上の3次元形状パターン、前記模擬画像、および前記荷電粒子線装置が前記模擬画像を取得する際の条件を記述した付帯情報の間の関係を学習し、
前記出力部は、前記計測画像と、前記荷電粒子線装置が前記計測画像を取得する際の条件を記述した付帯情報とを前記学習器に対して入力することにより前記学習器から得られる前記試料の3次元形状を出力する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記検出可能範囲を記述したデータを受け取るか、または前記検出可能範囲を入力するインターフェースを介して前記検出可能範囲の値を受け取り、
前記演算部は、前記受け取った検出可能範囲を前記記憶部へ格納する
ことを特徴とする請求項1記載の画像処理システム。 - 前記演算部は、前記検出器の形状を記述したデータを受け取るか、または前記検出器の形状を入力するインターフェースを介して前記検出器の形状を受け取り、
前記演算部は、前記受け取った検出器の形状を用いて前記検出可能範囲を計算して前記記憶部へ格納する
ことを特徴とする請求項1記載の画像処理システム。 - 前記学習器は、前記試料の高さ、幅、長さ、テーパ角、丸み、領域の広さ、容積、のうち少なくとも1つを、学習結果として出力するように構成されており、
前記出力部は、前記学習結果から取得した前記試料の高さ、幅、長さ、テーパ角、丸み、領域の広さ、容積、のうち少なくとも1つを出力する
ことを特徴とする請求項1記載の画像処理システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020132779A JP7364540B2 (ja) | 2020-08-05 | 2020-08-05 | 画像処理システム |
| KR1020210064542A KR102557723B1 (ko) | 2020-08-05 | 2021-05-20 | 화상 처리 시스템 |
| US17/382,515 US11852599B2 (en) | 2020-08-05 | 2021-07-22 | Image processing system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020132779A JP7364540B2 (ja) | 2020-08-05 | 2020-08-05 | 画像処理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022029505A JP2022029505A (ja) | 2022-02-18 |
| JP7364540B2 true JP7364540B2 (ja) | 2023-10-18 |
Family
ID=80114917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020132779A Active JP7364540B2 (ja) | 2020-08-05 | 2020-08-05 | 画像処理システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11852599B2 (ja) |
| JP (1) | JP7364540B2 (ja) |
| KR (1) | KR102557723B1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230420278A1 (en) * | 2022-06-24 | 2023-12-28 | Kla Corporation | Image Modeling-Assisted Contour Extraction |
| KR102575268B1 (ko) * | 2022-11-16 | 2023-09-06 | (주)에프피에이 | 인공지능 기반의 정밀 오토포커스 기능을 갖는 웨이퍼 비전 검사 장치 및 방법 |
| KR102670982B1 (ko) * | 2023-12-15 | 2024-05-30 | 재단법인 포항산업과학연구원 | 칼라 강판에 대한 결함 검출 방법, 결함 검출 장치, 및 컴퓨터 프로그램 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007129059A (ja) | 2005-11-04 | 2007-05-24 | Hitachi High-Technologies Corp | 半導体デバイス製造プロセスモニタ装置および方法並びにパターンの断面形状推定方法及びその装置 |
| JP2010072700A (ja) | 2008-09-16 | 2010-04-02 | Univ Of Electro-Communications | 画像処理装置、画像処理方法、及び、撮像システム |
| JP2015008148A (ja) | 2012-02-02 | 2015-01-15 | アプライド マテリアルズ イスラエル リミテッド | 走査電子顕微鏡画像を用いた3次元マッピング |
| JP2017199606A (ja) | 2016-04-28 | 2017-11-02 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| US20190311877A1 (en) | 2018-04-10 | 2019-10-10 | Bae Systems Information And Electronic Systems Integration Inc. | Sample manipulation for nondestructive sample imaging |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1174326A (ja) * | 1997-08-29 | 1999-03-16 | Hitachi Ltd | 半導体断面観察装置 |
| JP2007218711A (ja) * | 2006-02-16 | 2007-08-30 | Hitachi High-Technologies Corp | 電子顕微鏡装置を用いた計測対象パターンの計測方法 |
| JP4920268B2 (ja) * | 2006-02-23 | 2012-04-18 | 株式会社日立ハイテクノロジーズ | 半導体プロセスモニタ方法およびそのシステム |
| JP6959831B2 (ja) * | 2017-08-31 | 2021-11-05 | 株式会社日立製作所 | 計算機、処理の制御パラメータの決定方法、代用試料、計測システム、及び計測方法 |
| JP6865465B2 (ja) * | 2017-11-10 | 2021-04-28 | 株式会社日立ハイテク | パターン計測装置および計測方法 |
| KR102592253B1 (ko) | 2019-02-15 | 2023-10-24 | 주식회사 히타치하이테크 | 구조 추정 시스템, 구조 추정 프로그램 |
-
2020
- 2020-08-05 JP JP2020132779A patent/JP7364540B2/ja active Active
-
2021
- 2021-05-20 KR KR1020210064542A patent/KR102557723B1/ko active IP Right Grant
- 2021-07-22 US US17/382,515 patent/US11852599B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007129059A (ja) | 2005-11-04 | 2007-05-24 | Hitachi High-Technologies Corp | 半導体デバイス製造プロセスモニタ装置および方法並びにパターンの断面形状推定方法及びその装置 |
| JP2010072700A (ja) | 2008-09-16 | 2010-04-02 | Univ Of Electro-Communications | 画像処理装置、画像処理方法、及び、撮像システム |
| JP2015008148A (ja) | 2012-02-02 | 2015-01-15 | アプライド マテリアルズ イスラエル リミテッド | 走査電子顕微鏡画像を用いた3次元マッピング |
| US20150136960A1 (en) | 2012-02-02 | 2015-05-21 | Applied Materials Israel, Ltd. | Three-dimensional mapping using scanning electron microscope images |
| JP2017199606A (ja) | 2016-04-28 | 2017-11-02 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| US20170316915A1 (en) | 2016-04-28 | 2017-11-02 | Hitachi High-Technologies Corporation | Charged Particle Beam Apparatus |
| US20190311877A1 (en) | 2018-04-10 | 2019-10-10 | Bae Systems Information And Electronic Systems Integration Inc. | Sample manipulation for nondestructive sample imaging |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220042936A1 (en) | 2022-02-10 |
| US11852599B2 (en) | 2023-12-26 |
| JP2022029505A (ja) | 2022-02-18 |
| KR20220017818A (ko) | 2022-02-14 |
| KR102557723B1 (ko) | 2023-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110024074B (zh) | 电子显微镜装置及使用其的倾斜孔的测量方法 | |
| JP7364540B2 (ja) | 画像処理システム | |
| US20090214103A1 (en) | Method for measuring a pattern dimension | |
| US7459712B2 (en) | Method and apparatus of measuring pattern dimension and controlling semiconductor device process having an error revising unit | |
| JP4262592B2 (ja) | パターン計測方法 | |
| US7817860B2 (en) | Method and apparatus for measuring dimension using electron microscope | |
| US20120290990A1 (en) | Pattern Measuring Condition Setting Device | |
| TWI785824B (zh) | 構造推定系統、構造推定程式 | |
| WO2016121265A1 (ja) | 試料観察方法および試料観察装置 | |
| US8214166B2 (en) | Method and its system for calibrating measured data between different measuring tools | |
| JP2007218711A (ja) | 電子顕微鏡装置を用いた計測対象パターンの計測方法 | |
| US20050285034A1 (en) | Method and apparatus for measuring three-dimensional shape of specimen by using SEM | |
| WO2011001635A1 (ja) | 半導体検査装置及びそれを用いた半導体検査方法 | |
| US20110233400A1 (en) | Pattern measurement apparatus and pattern measurement method | |
| JP2021097039A (ja) | 透過菊池回折パターンの改良方法 | |
| US9110384B2 (en) | Scanning electron microscope | |
| KR20220002572A (ko) | 화상 처리 프로그램, 화상 처리 장치 및 화상 처리 방법 | |
| WO2019082497A1 (ja) | 荷電粒子線装置、断面形状推定プログラム | |
| JP2009009867A (ja) | 荷電粒子線装置 | |
| JP7018365B2 (ja) | 荷電粒子線装置および分析方法 | |
| JP6207893B2 (ja) | 試料観察装置用のテンプレート作成装置 | |
| US20240144560A1 (en) | Training Method for Learning Apparatus, and Image Generation System | |
| KR102678481B1 (ko) | 하전 입자 빔 장치 | |
| TWI850667B (zh) | 深度計測裝置、深度計測系統及深度指標值算出方法 | |
| KR101683548B1 (ko) | 전자 빔을 이용한 오버레이 측정장치와 이의 측정방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7364540 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |