JP7345101B2 - 画像認識装置および画像認識方法 - Google Patents
画像認識装置および画像認識方法 Download PDFInfo
- Publication number
- JP7345101B2 JP7345101B2 JP2020553045A JP2020553045A JP7345101B2 JP 7345101 B2 JP7345101 B2 JP 7345101B2 JP 2020553045 A JP2020553045 A JP 2020553045A JP 2020553045 A JP2020553045 A JP 2020553045A JP 7345101 B2 JP7345101 B2 JP 7345101B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- recognition rate
- recognition
- condition
- subject
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/73—Circuitry for compensating brightness variation in the scene by influencing the exposure time
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B7/00—Control of exposure by setting shutters, diaphragms or filters, separately or conjointly
- G03B7/08—Control effected solely on the basis of the response, to the intensity of the light received by the camera, of a built-in light-sensitive device
- G03B7/091—Digital circuits
- G03B7/093—Digital circuits for control of exposure time
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/617—Upgrading or updating of programs or applications for camera control
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/631—Graphical user interfaces [GUI] specially adapted for controlling image capture or setting capture parameters
- H04N23/632—Graphical user interfaces [GUI] specially adapted for controlling image capture or setting capture parameters for displaying or modifying preview images prior to image capturing, e.g. variety of image resolutions or capturing parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/72—Combination of two or more compensation controls
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/743—Bracketing, i.e. taking a series of images with varying exposure conditions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
- G06N20/10—Machine learning using kernel methods, e.g. support vector machines [SVM]
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- Artificial Intelligence (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Studio Devices (AREA)
- Exposure Control For Cameras (AREA)
- Image Analysis (AREA)
Description
本開示は、画像認識装置および画像認識方法に関する。
近年、画像を用いて情報処理を行う装置が普及しつつある。そのような装置は、種々の機械に搭載され得る。そのような機械として、自動運転車が挙げられる。そのような機械として、工場の自動化に利用されるロボットも挙げられる。
情報処理の一例は、画像に写っている物体の認識である。この認識を行うためのアルゴリズムが研究開発されている。特許文献1には、アルゴリズムの一例が記載されている。
画像を用いた情報処理の精度を高める技術が要求されている。
本開示は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える、画像認識装置を提供する。
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える、画像認識装置を提供する。
本開示は、画像を用いた情報処理の精度を高める技術を提供する。
(本開示の基礎となった知見)
特許文献1には、画像を用いた情報処理の一例が記載されている。特許文献1の情報処理では、1回の露光を行うことにより得られた画像が用いられる。
特許文献1には、画像を用いた情報処理の一例が記載されている。特許文献1の情報処理では、1回の露光を行うことにより得られた画像が用いられる。
本発明者は、多重露光撮影された画像を用いることにより、情報処理の精度を高めることを検討した。
(本開示に係る一態様の概要)
本開示の第1態様に係る画像認識装置は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える。
本開示の第1態様に係る画像認識装置は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える。
第1態様に係る技術は、認識率の算出精度を確保するのに適している。
本開示の第2態様において、例えば、第1態様に係る画像認識装置では、前記認識率が前記認識率閾値よりも小さい場合に変更される前記条件は、(a)前記第1画像を得るにあたって採用される各露光期間の長さ、(b)前記第1画像を得るにあたって採用される各露光間隔の長さ、(c)前記第1画像を得るにあたって採用される露光回数、(d)前記第1画像の露光感度、(e)前記第1画像を得るのに用いられる撮像装置のゲイン、(f)前記第1画像を得るのに用いられる撮像装置の焦点距離、(g)前記第1画像を得るのに用いられる撮像装置の絞り、および(h)前記第1画像の出力解像度、からなる群より選択される少なくとも1つを含んでいてもよい。
第2態様の条件の変更は、認識率の向上に寄与し得る。
本開示の第3態様において、例えば、第1態様または第2態様に係る画像認識装置は、前記認識率を表示する内蔵表示装置、および、前記認識率を表示する外付け表示装置へと前記認識率を出力する出力インターフェースから選ばれる少なくとも1つをさらに備えていてもよい。
第3態様によれば、認識率を視認できる。
本開示の第4態様において、例えば、第1から第3態様のいずれか1つに係る画像認識装置は、前記第1画像を得るのに用いられる撮像装置をさらに備えていてもよい。
第4態様によれば、第1画像が容易に得られる。
本開示の第5態様において、例えば、第1から第4態様のいずれか1つに係る画像認識装置では、前記条件と前記第1画像とが対応付けられてもよい。
第5態様によれば、多重露光撮影の条件を情報として利用し易い。
本開示の第6態様において、例えば、第5態様に係る画像認識装置は、前記第1画像と対応付けられる前記条件として、前記制御回路において保持されている前記条件が用いられてもよい。
本開示の第7態様において、例えば、第5態様に係る画像認識装置は、前記第1画像を得るのに用いられる撮像装置をさらに備えていてもよく、前記第1画像と対応付けられる前記条件として、前記撮像装置において保持されている前記条件が用いられてもよい。
第6態様によっても第7態様によっても、多重露光撮影の条件と第1画像とを適切に対応づけることができる。
本開示の第8態様において、例えば、第1から第7態様のいずれか1つに係る画像認識装置では、前記処理回路は、前記第1画像および前記第1被写体の物体名にそれぞれ対応する教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行ってもよく、前記教師あり学習後において、前記第1画像を用いて前記認識率を算出してもよい。
第8態様の処理回路によれば、認識率の算出精度を確保できる。
本開示の第9態様において、例えば、第8態様の画像認識装置は、前記教師画像を得るのに用いられる第2撮像装置をさらに備えていてもよい。
第9態様の撮像装置によれば、学習を行い易い。
本開示の第10態様において、例えば、第8態様または第9態様の画像認識装置では、前記処理回路は、ニューラルネットワークで表現される演算モデルを読み込んでおり、前記処理回路は、前記教師あり学習を行ってもよく、前記教師あり学習後において、前記第1画像を用いて前記認識率を算出してもよい。
ニューラルネットワークは、画像を用いた情報処理に適している。
本開示の第11態様において、例えば、第1から第10態様のいずれか1つに係る画像認識装置では、前記処理回路による前記認識率の算出と、前記認識率が前記認識率閾値よりも小さい場合における前記制御回路による前記条件の変更と、が、終了条件が成立するまで繰り返されてもよい。
第11態様は、高い認識率を得るのに適している。
本開示の第12態様において、例えば、第1から第11態様のいずれか1つに係る画像認識装置では、前記処理回路は、前記認識率である第1認識率であって前記第1被写体が第1物体であることの確からしさを表す第1認識率と、前記第1被写体が第2物体であることの確からしさを表す第2認識率と、を算出してもよく、前記制御回路は、前記第1認識率から前記第2認識率を差し引いた差分がZ以下である場合にも、前記多重露光撮影の条件を変更してもよい。ここで、Zは、0以上の値である。
画像における被写体が特定の物体である可能性のみならず他の物体である可能性もあると認識され得るように、画像認識装置を構成することは可能である。第9態様に係る技術は、そのような画像認識装置において、利用可能である。
本開示の第13態様において、例えば、第1から第12態様のいずれか1つに係る画像認識装置では、前記処理回路は、前記認識率の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の参照用の前記認識率を算出してもよく、前記制御回路は、複数の参照用の前記認識率を互いに比較することによって、ベースとなる前記条件であるベース条件を選択してもよく、前記処理回路は、前記ベース条件により得られた前記第1画像であって複数の参照用の前記認識率を算出するための前記第1画像とは異なる前記第1画像を用いて、前記認識率閾値と比較されるべき前記認識率を算出してもよい。
第13態様は、高い認識率が得られる多重露光撮影の条件を素早く見出す観点から有利である。
本開示の第14態様に係る画像認識装置は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出する処理回路と、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える。
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出する処理回路と、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える。
第14態様に係る技術は、第1被写体の速度の算出精度を確保するのに適している。
本開示の第15態様に係る画像認識方法は、
第1被写体が多重露光撮影された第1画像を用いて前記第1被写体の認識率を算出することと、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更することと、を含む。
第1被写体が多重露光撮影された第1画像を用いて前記第1被写体の認識率を算出することと、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更することと、を含む。
第15態様に係る技術は、認識率の算出精度を確保するのに適している。
本開示の第16態様に係る画像認識方法は、
第1被写体が多重露光撮影された第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出することと、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更することと、を含む。
第1被写体が多重露光撮影された第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出することと、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更することと、を含む。
第16態様に係る技術は、第1被写体の速度の算出精度を確保するのに適している。
本開示の第17態様に係る画像認識装置は、
メモリとプロセッサとを備えた画像認識装置であって、
前記プロセッサは、
第1被写体が多重露光撮影された第1画像が入力され、
前記第1画像を用いて前記第1被写体の認識率を算出し、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する。
メモリとプロセッサとを備えた画像認識装置であって、
前記プロセッサは、
第1被写体が多重露光撮影された第1画像が入力され、
前記第1画像を用いて前記第1被写体の認識率を算出し、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する。
第17態様に係る技術は、認識率の算出精度を確保するのに適している。
本開示の第18態様に係る画像認識装置は、
メモリとプロセッサとを備えた画像認識装置であって、
前記プロセッサは、
第1被写体が多重露光撮影された第1画像が入力され、
前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出し、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更する。
メモリとプロセッサとを備えた画像認識装置であって、
前記プロセッサは、
第1被写体が多重露光撮影された第1画像が入力され、
前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出し、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更する。
第18態様に係る技術は、第1被写体の速度の算出精度を確保するのに適している。
本開示の第19態様に係る画像認識装置は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記多重露光撮影の条件を変更する制御回路と、を備え、
前記処理回路は、前記認識率の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の前記認識率を算出する。
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記多重露光撮影の条件を変更する制御回路と、を備え、
前記処理回路は、前記認識率の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の前記認識率を算出する。
第19態様に係る技術は、認識率の算出精度を確保するのに適している。
本開示の第20態様に係る画像認識装置は、
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出する処理回路と、
前記多重露光撮影の条件を変更する制御回路と、を備え、
前記処理回路は、前記推定範囲の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の前記誤差Eを算出する。
第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出する処理回路と、
前記多重露光撮影の条件を変更する制御回路と、を備え、
前記処理回路は、前記推定範囲の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の前記誤差Eを算出する。
第20態様に係る技術は、第1被写体の速度の算出精度を確保するのに適している。
画像認識装置の技術は、画像認識方法に適用できる。画像認識方法の技術は、画像認識装置に適用できる。
(実施の形態1)
図1に、実施の形態1における画像認識装置99を示す。画像認識装置99は、光学系110と、撮像装置100と、画像形成回路130と、制御回路120と、処理回路170と、表示装置160と、を含む。画像形成回路130は、出力バッファ140を含む。
図1に、実施の形態1における画像認識装置99を示す。画像認識装置99は、光学系110と、撮像装置100と、画像形成回路130と、制御回路120と、処理回路170と、表示装置160と、を含む。画像形成回路130は、出力バッファ140を含む。
画像認識装置99では、カメラ部80が構成されている。カメラ部80は、光学系110と、撮像装置100と、画像形成回路130と、制御回路120と、を含む。
本実施の形態では、光学系110は、少なくとも1つのレンズを含む。制御回路120は、システムコントローラである。
以下の説明では、認識率という用語を使用することがある。認識率について説明する。本実施の形態では、画像認識装置99は、画像における被写体を認識する。画像認識装置99では、その認識の確からしさを表す数値として、認識率が算出される。
具体的には、画像認識装置99は、被写体は認識率XでYという物体である、という態様の認識を行い得る。Xは、0%以上100%以下の値である。Yは、物体名である。Yは、例えば、自動車、人、家、標識、信号機である。
典型的には、認識率が採り得る値の数は2つよりも多い。認識率が採り得る値には0%よりも大きく100%よりも小さい値が含まれる。典型的には、処理回路170では、計算機が構成されている。認識率は、その計算機の精度の範囲で、0%以上100%以下の任意の値を採り得る。
[画像認識装置99の構成要素の動作について]
撮像装置100は、光学系110を通じて被写体を撮像する。具体的には、撮像装置100は、イメージセンサを含む。撮像装置100は、イメージセンサを用いて、撮像を行う。撮像装置100は、撮像内容を表す信号を出力する。この信号は、RAWデータに対応する。
撮像装置100は、光学系110を通じて被写体を撮像する。具体的には、撮像装置100は、イメージセンサを含む。撮像装置100は、イメージセンサを用いて、撮像を行う。撮像装置100は、撮像内容を表す信号を出力する。この信号は、RAWデータに対応する。
画像形成回路130は、この信号を画像に変換する。具体的には、画像形成回路130は、RAWデータを画像データに変換する。こうして、RAWデータが画像化される。以下、画像データを、単に画像と称することがある。画像形成回路130は、出力バッファ140を介して処理回路170へと、画像を出力する。
画像形成回路130は、各種画像処理を実行可能なものであってもよい。画像処理は、例えば、各種補正処理、色処理等である。補正処理として、暗フレーム補正、欠陥画素補正が例示される。色処理として、ホワイトバランス処理、色マトリクス処理、ベイヤー補間処理が例示される。他の画像処理も採用され得る。例えば、エッジ強調、2値化処理は、認識率の向上に寄与し得る。画像処理が実行された場合、画像形成回路130は、出力バッファ140を介して処理回路170へと、画像処理後の画像を出力する。
画像処理は、処理回路170に担当させてもよい。画像認識装置99は、画像処理を行う構成要素を有していなくてもよい。
処理回路170は、画像を用いて認識率を算出する。具体的には、処理回路170は、画像における被写体が何であるのかを認識する。言い換えると、処理回路170は、画像における被写体の物体名を認識する。そして、処理回路170は、その認識の確からしさを表す認識率を算出する。
処理回路170は、表示装置160へと、画像と、認識した物体名と、その認識の認識率と、を出力する。また、処理回路170は、制御回路120へと、認識率を出力する。
表示装置160は、画像と、認識した物体名と、その認識の認識率と、を表示する。
制御回路120は、撮像装置100の撮像条件を制御する。また、制御回路120は、画像形成回路130の画像形成条件を制御する。
[多重露光撮影について]
撮像装置100は、多重露光撮影を実行できる。多重露光撮影により、1つの被写体の像を複数個含むRAWデータを得ることができる。画像形成回路130は、そのようなRAWデータを、1つの被写体の像を複数個含む画像に変換できる。以下、そのような画像を第1画像と称することがある。また、この1つの被写体を、第1被写体と称することがある。
撮像装置100は、多重露光撮影を実行できる。多重露光撮影により、1つの被写体の像を複数個含むRAWデータを得ることができる。画像形成回路130は、そのようなRAWデータを、1つの被写体の像を複数個含む画像に変換できる。以下、そのような画像を第1画像と称することがある。また、この1つの被写体を、第1被写体と称することがある。
処理回路170には、第1被写体が多重露光撮影された第1画像が入力される。処理回路170は、その第1画像を用いて、第1被写体の認識率を算出する。第1画像によれば、1つの被写体の像を1個だけ含む画像に比べ、画像における被写体の輪郭の鮮明さと、画像に含まれる動き情報の多さと、を両立させ易い。このため、第1画像は、高い認識率を得る観点から有利である。具体的に、処理回路170は、第1画像における第1被写体の物体名を認識し、その認識の確からしさを表す認識率を算出する。
以下、1つの被写体の像を1個だけ含む画像に比べ、第1画像が高い認識率を得る観点から有利である理由を、具体例を挙げながらさらに説明する。
1つの被写体の像を1個だけ含む画像も、動き情報を含んでいることがある。例えば、走行中の車を長い露光時間で撮影することを考える。その場合、ぶれが大きい被写体の像が得られる。ぶれが大きい被写体の像を含む画像によれば、被写体が移動しているのかどうかを判別し易い。なぜなら、そのような画像には、被写体に関する動き情報が含まれているためである。しかし、ぶれが大きい被写体の像では、被写体を特徴づける輪郭はぼやけている。このため、像に対応する被写体が車であると判別するのは難しい。
反対に、走行中の車を短い露光時間で撮影することを考える。その場合、ぶれが小さい被写体の像が得られる。ぶれが小さい被写体の像では、被写体を特徴づける鮮明な輪郭が得られ易い。このため、像に対応する被写体が車であると判別し易い。しかし、ぶれが小さい被写体の像では、画像から車が移動しているのかどうかを判別し難い。なぜなら、そのような画像は、被写体である車に関する動き情報に乏しいためである。
これらに対し、多重露光撮影により得られた画像では、画像における被写体の輪郭の鮮明さと、画像に含まれる動き情報の多さと、を両立させ易い。この両立が可能であることは、認識率の算出精度を確保する観点から有利である。また、この両立が可能であることは、後述の実施形態2において第1被写体の速度の算出精度を確保する観点からも有利である。
この両立が多重露光撮影により実現されている様子が、後に詳細に説明する図4Bの上側に現れている。具体的には、図4Bの例では、被写体Cの鮮明な輪郭が得られている。この鮮明な輪郭は、車を特徴づけている。このため、図4Bの画像から、像に対応する被写体が車であると判別し易い。また、図4Bの画像は、被写体Cの複数の像を含んでおり、従って動き情報を含んでいる。このため、画像から、被写体である車が走行中であると判別し易い。上述のように、これらを判別し易いことは、認識率の算出精度および第1被写体の速度の算出精度を確保する観点から有利である。
制御回路120は、認識率が認識率閾値よりも小さい場合に、多重露光撮影の条件を変更する。この変更は、認識率の向上に寄与し得る。認識率閾値は、例えば、10%以上70%以下の範囲にある特定の値である。
以上の説明から理解されるように、処理回路170および制御回路120は、認識率の算出精度向上に適した構成を有している。また、処理回路170および制御回路120の動作は、過度な演算負荷を必要としない。このため、本実施の形態の技術によれば、演算負荷の抑制と認識率の算出精度向上とを両立させることも可能である。
具体的には、本実施の形態では、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像を用いて、認識率を再度算出する。
より具体的には、本実施の形態では、処理回路170による認識率の算出と、認識率が認識率閾値よりも小さい場合における制御回路120による条件の変更と、が、終了条件が成立するまで繰り返される。
多重露光撮影の条件の変更の態様は、特に限定されない。例えば、撮像装置100がレジスタを有している場合がある。その場合、制御回路120は、そのレジスタに条件を書き込むことができる。この書き込みは、例えば、シリアル通信等により行うことができる。
認識率が認識率閾値よりも小さい場合に変更される多重露光撮影の条件は、例えば、条件(a)、条件(b)、条件(c)、条件(d)、条件(e)、条件(f)、条件(g)および条件(h)からなる群より選択される少なくとも1つを含む。条件(a)は、第1画像を得るにあたって採用される各露光期間の長さである。条件(b)は、第1画像を得るにあたって採用される各露光間隔の長さである。露光間隔は、露光期間の間の非露光期間に対応する。条件(c)は、第1画像を得るにあたって採用される露光回数である。条件(d)は、第1画像の露光感度である。条件(e)は、第1画像を得るのに用いられる撮像装置100のゲインである。条件(f)は、第1画像を得るのに用いられる撮像装置100の焦点距離である。条件(g)は、第1画像を得るのに用いられる撮像装置100の絞りである。条件(h)は、第1画像の出力解像度である。これらの条件の変更は、認識率の向上に寄与し得る。
図1の例では、表示装置160は、画像認識装置99の内部表示装置である。このように、画像認識装置99は、認識率を表示する内部表示装置を備える。内部表示装置は、具体的には、第1画像と、認識した物体名と、その認識の認識率と、を表示し得る。
ただし、画像認識装置99は、認識率を表示する外付け表示装置へと認識率を出力する出力インターフェースを備えていてもよい。具体的には、画像認識装置99は、第1画像と、認識した物体名と、その認識の認識率と、を外付け表示装置へと出力する出力インターフェースを備えていてもよい。そして、外付け表示装置は、第1画像と、認識した物体名と、その認識の認識率と、を表示するものであってもよい。
画像認識装置99は、内部表示装置および出力インターフェースの一方を備えていてもよい。画像認識装置99は、これらの両方を備えていてもよい。
本実施の形態では、多重露光撮影の条件と第1画像とが対応付けられる。このようにすれば、多重露光撮影の条件を情報として利用し易い。この対応付けは、例えば、第1画像が得られた後になされる。
一例では、表示装置160は、第1画像が多重露光撮影された際の多重露光撮影の条件を、第1画像上に重ね合わせて表示する。この重ね合わせは、多重露光撮影の条件と第1画像との対応付けに該当する。別の例では、第1画像が多重露光撮影された際の多重露光撮影の条件が第1画像と対応する旨を表す情報が、テキストファイル形式で記憶される。この記憶も、多重露光撮影の条件と第1画像との対応付けに該当する。
一例では、第1画像と対応付けられる条件として、制御回路120において保持されている条件が用いられる。
別の例では、画像認識装置99は、第1画像を得るのに用いられる撮像装置100を備える。第1画像と対応付けられる条件として、撮像装置100において保持されている条件が用いられる。
多重露光撮影の具体的態様について、図2A、図2Bおよび図2Cを参照しながら説明する。
図2Aおよび2Bでは、1フレーム期間中に複数回の露光期間が存在する形式が示されている。この形式では、1フレーム期間中に、複数回の露光動作が実行される。その後、露光により得られた信号が読み出される。図2Aおよび2Bの「センサデータ出力」が、この読み出しに相当する。図2Aおよび2Bの形式は、撮像装置100のイメージセンサがグローバルシャッタ機能を有している場合に実現され得る。
具体的には、図2Aの形式は、撮像装置100が露光と読み出しとをシリアルに行うイメージセンサを有する場合に、実現され得る。この形式では、1フレーム期間中において、非露光の期間と露光の期間とが交互に現れ、その後、これらの複数回の露光により得られた信号が読み出される。本実施の形態では、図2Aの形式が採用されている。
図2Bの形式は、撮像装置100が露光と読み出しとをパラレルに行うイメージセンサを有する場合に、実現され得る。図2Bでは、フレームF1に、フレームF2が後続している。フレームF1の1フレーム期間中において、非露光の期間と露光の期間とが交互に現れる。これらの複数回の露光により得られた信号は、フレームF2において読み出される。このように、この形式では、あるフレームにおいて非露光の期間と露光の期間とが交互に現れ、これらの露光により得られた信号が、その次のフレームにおいて読み出される。
多重露光撮影およびグローバルシャッタ機能は、例えば、画素電極と対向電極とによって光電変換膜が挟まれた積層型の撮像装置で実現可能である。例えば、そのような積層型の撮像装置において、対向電極に印加する電圧を制御することによって露光期間と非露光期間とを設定できる。積層型の撮像装置の具体例については、特許文献2等を参照されたい。
変形例の画像認識装置99では、撮像装置100は、グローバルシャッタ機能を有さない。そのような画像認識装置99であっても、第1被写体が多重露光撮影された第1画像を得ることは可能である。具体的には、変形例に係る画像形成回路130は、図2Cに示すように、フレームメモリ151およびフレーム加算回路152を含む。この変形例では、撮像装置100は、イメージセンサで得たデータを、フレームメモリ151に出力する。この1つの出力データは、1つの被写体の像を1つだけ含む。フレームメモリ151では、複数の出力データが貯えられる。フレーム加算回路152は、これら複数の出力データのフレーム加算を行う。こうして、疑似的な多重露光画像が得られる。
本明細書では、このような疑似的な多重露光画像も、上記第1画像に含まれるものとする。疑似的な多重露光画像が得られる場合も、第1被写体が多重露光撮影されると言える。具体的に、この場合、撮像装置100が、画像形成回路130と協働して第1被写体を多重露光撮影すると言える。また、「第1画像を得るにあたって採用される」という表現は、撮像装置100において採用される場合と、画像形成回路130において採用される場合と、の両方を包含する意の表現である。
多重露光撮影の条件の設定は、図2Aおよび図2Bの例では、撮像装置100に対して行われ得る。この設定は、図2Cの例では、撮像装置100および画像形成回路130に対して行われ得る。
図3、図4A、図4B、図5Aおよび図5Bを参照して、多重露光撮影で得られる画像について説明する。
図3は、多重露光撮影で得られる画像の一例である。図3の画像には、被写体Aと、被写体Bと、被写体Cと、被写体Dと、が写っている。
被写体Aおよび被写体Bは、静止している被写体である。静止した被写体の像を多重露光撮影により得た場合と通常露光撮影により得た場合とでは、多重露光撮影と通常露光撮影とで露光時間の合計が異なる場合、輝度値に差が生じる。ただし、それ以外に、見た目に大きな差は生じない。図3の例では、被写体Aは、木である。被写体Bは、家である。
被写体Cおよび被写体Dは、動いている被写体である。動いている被写体を多重露光撮影すると、その被写体の複数の像が互いにずれて現れる。被写体Cは、動きが速い被写体である。被写体Cの各像の間には大きいずれがある。被写体Dは、動きが遅い被写体である。被写体Cの各像の間には小さいずれがある。図3の例では、被写体Cは、車である。被写体Dは、人間である。
図4Aおよび図4Bを参照して、被写体Cの多重露光撮影について、さらに説明する。
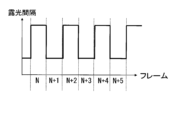
図4Aは、被写体Cの多重露光撮影において、図2Aの形式が採用されていることを表している。図4Aの具体例では、露光期間T1、T2およびT3がこの順に現れる。また、図4Aには、露光間隔W1およびW2を示している。図示しているように、露光間隔は、露光期間の間の非露光期間に対応する。
図4Bの下側には、露光期間T1において得られる被写体Cの像と、露光期間T2において得られる被写体Cの像と、露光期間T3において得られる被写体Cの像と、が示されている。これらの像が多重化されると、図4Bの上側に示す多重露光画像が得られる。得られた多重露光画像は、イメージセンサから出力され得る。
図5Aおよび図5Bを参照して、露光間隔と、得られる多重露光画像と、の関係を説明する。
図5Aのブロック矢印は、被写体Cの進行方向を表している。図5Bは、その進行方向に被写体Cが動く場合の各像を示している。図5Bの上側の画像は、露光間隔が長い場合に得られる多重露光画像を表している。この場合、被写体Cの各像の間のずれが大きい。図5Bの下側の画像は、露光間隔が短い場合に得られる多重露光画像を表している。この場合、被写体Cの各像の間のずれが小さい。露光間隔に応じて、被写体Cの各像の間のずれの大きさが変化する。
[多重露光撮影の条件の変更の仕方の具体例]
図6のフローチャートに従って、多重露光撮影の条件が変更され得る。
図6のフローチャートに従って、多重露光撮影の条件が変更され得る。
ステップS1において、多重露光撮影の条件の初期値が設定される。この設定は、制御回路120によって行われ得る。ステップS1の後、フローは、ステップS2に進む。
ステップS2において、終了条件が成立しているか否かが判定される。この判定は、例えば、制御回路120によって行われる。終了条件の具体例については後述する。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS3に進む。
ステップS3において、撮像装置100によって、撮像が行われる。撮像は、設定された多重露光撮影の条件に従って行われる。ステップS3の後、フローは、ステップS4に進む。
ステップS4において、撮像装置100から、RAWデータが、画像形成回路130へと出力される。このRAWデータは、ステップS3の撮像内容を表す。ステップS4の後、フローは、ステップS5に進む。
ステップS5において、画像形成回路130によって、RAWデータが画像化される。画像形成回路130は、得られた画像データを、処理回路170へと出力する。ステップS5の後、フローは、ステップS6に進む。
ステップS6において、処理回路170によって、認識処理が行われる。認識処理では、画像に含まれる被写体の認識が行われる。認識に用いられる画像は、上述の、第1被写体が多重露光撮影された第1画像である場合がある。この場合、処理回路170は、第1画像を用いて、第1被写体の認識率を算出する。そして、処理回路170は、認識率を、制御回路120へと出力する。具体的には、処理回路170は、第1画像における第1被写体の物体名を認識し、その認識の確からしさを表す認識率を算出する。そして、処理回路170は、認識率を、制御回路120へと出力する。ステップS6の後、フローは、ステップS7に進む。
ステップS7において、制御回路120によって、認識率が認識率閾値よりも小さいか否かが判定される。認識率が認識率閾値よりも小さい場合、フローは、ステップS8に進む。認識率が認識率閾値以上である場合、フローは、ステップS2に進む。
ステップS8において、制御回路120によって、多重露光撮影の条件が変更される。ステップS8の後、フローは、ステップS2に進む。
ステップS2の終了条件の第1の例は、画像認識装置99の外部から終了命令が入力されたという条件である。終了命令が入力された場合、フローは終了する。終了命令が入力されていない場合、フローは、ステップS3に進む。
ステップS2の終了条件の第2の例は、画像認識装置99の電源をオフにする命令が入力されたという条件である。この命令が入力された場合、フローは終了する。この命令が入力されていない場合、フローは、ステップS3に進む。
ステップS2の終了条件の第3の例は、直近のステップS6で算出された認識率が、第1上限閾値よりも大きいという条件である。認識率が第1上限閾値よりも大きい場合、フローは終了する。認識率が第1上限閾値以下である場合、フローは、ステップS3に進む。第1上限閾値は、典型的には、認識率閾値よりも大きい。
ステップS2の終了条件の第4の例は、直近のステップS6で算出された認識率が、第1下限閾値よりも小さいという条件である。認識率が第1下限閾値よりも小さい場合、フローは終了する。認識率が第1下限閾値以上である場合、フローは、ステップS3に進む。第1下限閾値は、典型的には、認識率閾値よりも小さい。
第3の例の条件または第4の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。
ステップS2の終了条件の第5の例は、ステップS6で算出された認識率が第1上限閾値よりも大きいという状況が連続して第1閾値回数続いているという条件である。この状況が連続して第1閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。この条件は、上記状況をもたらすフレームが連続して第1閾値回数続いて現れるという条件であるとも言える。
ステップS2の終了条件の第6の例は、ステップS6で算出された認識率が第1下限閾値よりも小さいという状況が連続して第2閾値回数続いているという条件である。この状況が連続して第2閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。この条件は、上記状況をもたらすフレームが連続して第2閾値回数続いて現れるという条件であるとも言える。
第5の例の条件または第6の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。その場合、第1閾値回数および第2閾値回数は、同じであってもよく、異なっていてもよい。
ステップS2の終了条件の第7の例は、図6の「開始」の後に、ステップS3の撮像が第3閾値回数行われているという条件である。ステップS3の撮像が第3閾値回数行われている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。この条件は、図6の「開始」の後に、フレームが第3閾値回数生成されたという条件であるとも言える。
図6のフローチャートを改変することも可能である。例えば、図2Cに従って疑似的な多重露光画像を形成する場合、フレーム加算がなされるように、図6のフローチャートが改変され得る。
図6のフローチャートに従った多重露光撮影の条件の変更は、認識率を向上させ得る。この点について、図7Aおよび図7Bを参照して説明する。図7Aおよび図7Bの例では、変更される上記条件は、露光間隔であるものとする。
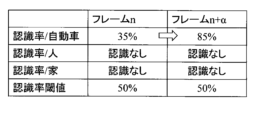
図7Aに、フレームnにおける多重露光撮影の条件と、フレームn+αにおける多重露光撮影の条件と、を示す。nおよびαは、自然数である。図7Aは、図6のフローチャートに従って、露光間隔が2msから4msに変更されたことを表している。
図7Bに、フレームnにおける認識率と、フレームn+αにおける認識率と、を示す。図7Bの例では、第1被写体は、自動車であるものとする。図7Bは、図6のフローチャートに従って、第1被写体の認識率が向上したことを表している。具体的には、第1画像における第1被写体が自動車と認識した場合において、その認識の確からしさを表す認識率が35%から85%に上昇したことを表している。
図7Aおよび図7Bの例では、ステップS7において認識率が認識率閾値よりも小さい場合に、露光間隔を長くしている。現実に、露光間隔を長くすることにより、認識率が上昇することもある。ただし、露光間隔を短くすることにより、認識率が上昇することもある。
このことは、ある多重露光撮影の条件が数値で表される場合に一般化できる。ステップS7において認識率が認識率閾値よりも小さい場合に、その数値を大きくしてもよいし、小さくしてもよい。数値を大きくする方向または小さくする方向に変化させることで認識率が上昇する場合、認識率が認識率閾値以上になるまでその数値をその方向に変化させることが考えられる。一方、数値をその方向に変化させると認識率が低下する場合、その数値を逆方向に変化させることが考えられる。そして、逆方向への数値の変化により認識率が上昇する場合、認識率が認識率閾値以上になるまでその数値を当該逆方向に変化させることが考えられる。
上記の数値を大きくすればするほど、あるいは小さくすればするほど認識率が上昇する場合もある。しかし、典型的には、上記の数値には、認識率を高めるための最適値が存在する。この典型的な場合においては、ある方向に数値を変化させていくと、その数値が最適値を跨ぐときに認識率の変化が増加から減少に転じる。その跨ぐときの付近の数値を採用することにより、認識率は極大値に近い値をとることができる。
図6のフローチャートに従った多重露光撮影の条件変更により、認識率は変化していく。その変化の態様の例を、図8を参照して説明する。図8の例では、変更される上記条件は、露光間隔であるものとする。
図8の例では、フレームNに関するステップS7において、認識率が認識率閾値以上であると判定されている。このため、その次のフレームN+1において、フレームNの露光間隔が維持されている。
フレームN+1に関するステップS7において、認識率が認識率閾値以上であると判定されている。このため、その次のフレームN+2において、フレームN+1の露光間隔が維持されている。
フレームN+2に関するステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+3において、フレームN+2の露光間隔よりも長い露光間隔が採用されている。
フレームN+3に関するステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+4において、フレームN+3の露光間隔よりも長い露光間隔が採用されている。
フレームN+4に関するステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+5において、フレームN+4の露光間隔よりも長い露光間隔が採用されている。
図8の例では、フレームN+5において、フレームN+4よりも長い露光間隔が採用された結果、認識率が認識率閾値を超えるに至っている。
[画像における被写体が特定の物体である可能性のみならず他の物体である可能性もあると認識される得る画像認識装置において、利用可能な技術]
図7Aおよび図7Bの例では、画像における被写体が自動車である可能性が認識されている。一方、画像における被写体が人である可能性および家である可能性は認識されていない。つまり、図7Aおよび図7Bの例では、画像において被写体が特定の物体である可能性のみが認識されている。しかし、現実には、画像における被写体が特定の物体である可能性のみならず他の物体である可能性もあると認識されることもあり得る。以下、そのような場合に利用可能な技術を説明する。なお、以下では、図6、図7A、図7Bおよび図8を参照して説明した内容については、その説明を省略することがある。
図7Aおよび図7Bの例では、画像における被写体が自動車である可能性が認識されている。一方、画像における被写体が人である可能性および家である可能性は認識されていない。つまり、図7Aおよび図7Bの例では、画像において被写体が特定の物体である可能性のみが認識されている。しかし、現実には、画像における被写体が特定の物体である可能性のみならず他の物体である可能性もあると認識されることもあり得る。以下、そのような場合に利用可能な技術を説明する。なお、以下では、図6、図7A、図7Bおよび図8を参照して説明した内容については、その説明を省略することがある。
以下の説明では、第1認識率、第2認識率および第3認識率という用語を用いることがある。第1認識率は、第1被写体が第1物体であることの確からしさを表す。第1認識率は、図6のフローチャートの認識率に相当する。第2認識率は、第1被写体が第2物体であることの確からしさを表す。第3認識率は、第1被写体が第3物体であることの確からしさを表す。第1物体は、優先度が1である物体である。第2物体は、優先度が2である物体である。第3物体は、優先度が3である物体である。優先度の数値が小さいことは、優先度が高いことを意味する。つまり、これらの物体の中で、第1物体の優先度が最も高い。
第1認識率、第2認識率および第3認識率を算出し、これらの中で第1認識率が最大ではなかったとする。その場合、第1認識率、第2認識率および第3認識率の中で第1認識率が最大となるように、多重露光撮影の条件が変更される。
以下、図9Aおよび9Bを参照して、この技術について、具体例を挙げて説明する。図9Aおよび9Bの具体例では、第1物体は、人である。第2物体は、自動車である。第3物体は、家である。第1認識率は、第1被写体が人であることの確からしさを表す。第2認識率は、第1被写体が自動車であることの確からしさを表す。第3認識率は、第1被写体が家であることの確からしさを表す。この具体例では、変更される多重露光撮影の条件として、露光間隔が採用されている。
図9Aに、フレームnにおける多重露光撮影の条件と、フレームn+αにおける多重露光撮影の条件と、を示す。nおよびαは、自然数である。図9Aは、露光間隔が2msから4msに変更されたことを表している。
図9Bに、フレームnにおける認識率と、フレームn+αにおける認識率と、を示す。フレームnでは、第1認識率は、40%である。第2認識率は、75%である。第3認識率は、20%である。第1認識率は、第3認識率よりも高い。しかし、第1認識率は、第2認識率よりも低い。
このため、第1認識率、第2認識率および第3認識率の中で第1認識率が最大となるように、露光間隔が変更される。この変更の結果、フレームn+αでは、第1認識率、第2認識率および第3認識率の中で第1認識率が最大となっている。具体的に、第1認識率は、60%である。第2認識率は、30%である。第3認識率は、認識なしである。認識なしは、0%と扱うことができる。
上述の説明では、画像における被写体が第1物体である可能性と、第2物体である可能性と、第3物体である可能性とが認識される場合について述べた。ただし、正解の物体の候補として認識される物体の数は、2つであってもよく、4以上であってもよい。
例えば、処理回路170は、上記の認識率である第1認識率であって第1被写体が第1物体であることの確からしさを表す第1認識率と、第1被写体が第2物体であることの確からしさを表す第2認識率と、を算出するように構成され得る。そして、制御回路120は、第1認識率から第2認識率を差し引いた差分がZ以下である場合にも、多重露光撮影の条件を変更するものであり得る。ここで、Zは、0以上の値である。そのような処理回路170および制御回路120は、上述の技術の実現に適している。
Zは、0よりも大きい値、例えば10%以上20%以下の範囲の値であってもよい。このようにすれば、第1認識率を第2認識率よりも大きくすることができる。第1認識率と第2認識率との間に有意差が生じるようにすることにより、認識の信頼性を向上させることも可能である。
画像における被写体が特定の物体である可能性のみならず他の物体である可能性もあると認識され得る場合がある。その場合に利用可能な技術は、優先度を設定する技術に限られない。例えば、最初に得られた第1認識率および第2認識率のうち大きい方を、図6のフローチャートの認識率に対応付けてもよい。より一般的には、ある第1被写体についての物体名の複数の候補が、その確からしさを表す認識率とともに最初に得られたとする。その場合において、複数の認識率のうち最大のものを、図6のフローチャートの第1被写体の認識率に対応付けることができる。
[処理回路170の具体例]
一具体例では、処理回路170は、教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行う。教師画像は、第1画像に対応する。正解ラベルは、第1被写体の物体名に対応する。先に説明したように、物体名は、例えば、自動車、人、家等である。処理回路170は、教師あり学習後において、第1画像を用いて認識率を算出する。このような処理回路170によれば、認識率の算出精度を確保できる。
一具体例では、処理回路170は、教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行う。教師画像は、第1画像に対応する。正解ラベルは、第1被写体の物体名に対応する。先に説明したように、物体名は、例えば、自動車、人、家等である。処理回路170は、教師あり学習後において、第1画像を用いて認識率を算出する。このような処理回路170によれば、認識率の算出精度を確保できる。
本実施の形態では、画像認識装置99は、第1画像を得るのに用いられる撮像装置100を備える。以下、この撮像装置を、第1撮像装置と称することがある。画像認識装置99は、教師画像を得るのに用いられる第2撮像装置を備える。本実施の形態では、第2撮像装置は、第1撮像装置100と同じである。つまり、1つの第1撮像装置100が、第1撮像装置および第2撮像装置の両方として用いられる。ただし、第2撮像装置は、第1撮像装置100とは異なる撮像装置であってもよい。
一具体例では、処理回路170は、ニューラルネットワークで表現される演算モデルを読み込んでいる。処理回路170は、教師あり学習を行い、教師あり学習後において、第1画像を用いて認識率を算出する。このような処理回路170は、ニューラルネットワークに基づいて、教師あり学習を行い、教師あり学習後において、第1画像を用いて認識率を算出することができる。ニューラルネットワークは、画像を用いた情報処理に適している。ニューラルネットワークは、例えば、DCNN(Deep Convolutional Neural Network)である。
処理回路170が有するDCNNの例について、図10を参照して説明する。図10に示すDCNNは、入力層と、複数の中間層と、出力層と、を有する。
図10に示すDCNNの学習について説明する。処理回路170は、DCNNを学習させるために、教師画像に含まれる複数の画素の値からなるベクトルを入力層に入力する。そして、処理回路170は、中間層において畳み込みなどの処理を行う。これにより、教師画像に含まれる複数の画素の畳み込みがなされる。そして、処理回路170は、出力層からの出力と、入力された教師画像に対応する正解ラベルと、の誤差を算出する。
例えば、認識候補となる物体が人、自動車、及び家である場合、処理回路170は、出力層のノード数を3つに設定する。すなわち、出力層からの出力ベクトルは、第1ノードから出力される第1出力値と、第2ノードから出力される第2出力値と、第3ノードから出力される第3出力値と、からなる。処理回路170は、第1出力値を、教師画像の被写体が人であることの確からしさに対応させる。処理回路170は、第2認識率を、教師画像の被写体が自動車であることの確からしさに対応させる。処理回路170は、第3出力値を、教師画像の被写体が家であることの確からしさに対応させる。また、処理回路170は、正解ラベルに対応する教師ベクトルを生成する。上述の例では、正解ラベルが人である場合、教師ベクトル(1,0,0)を生成する。そして、処理回路170は、教師ベクトルと、DCNNの出力層からの出力ベクトルとの誤差ベクトルを求める。処理回路170は、誤差ベクトルが0ベクトルに近づくように、中間層の各ノードの係数(例えば重み)を更新する。また、処理回路170は、中間層だけでなく入力層における各ノードの係数を更新してもよい。
処理回路170は、教師画像と正解ラベルとの組み合わせを複数用いることで、DCNNを学習させる。ただし、DCNNの学習の態様は上述の例に限らない。
処理回路170は、第1画像に対する認識率を算出するために、学習済みのDCNNを用いる。具体的には、処理回路170は、第1画像に含まれる複数の画素の値をDCNNの入力層に入力し、中間層において畳み込み処理を行う。そして、処理回路170は、出力層からの出力ベクトルに基づいて認識率を求める。上述の例において、出力ベクトル(0.04,0.92,0.01)が求められた場合、処理回路170は、第1画像の第1被写体が自動車であることの確からしさを表す第1認識率0.92を求める。
なお、処理回路170は、画像をDCNNに入力する前に、当該画像に前処理を行ってもよい。例えば、前処理には、フィルタリングによるノイズ除去が含まれる。これにより、学習及び認識の精度は向上する。
処理回路170において学習が行われることは、必須ではない。制御回路120は、テンプレートマッチング、特徴マッチング等によって、認識率を算出するように構成されていてもよい。処理回路170は、サポートベクターマシン(SVM:Support Vector Machine)のようなパターン認識モデルによって、認識率を算出するように構成されていてもよい。
[複数の撮像装置100を用いた例]
図11の例では、画像認識装置199は、2つのカメラ部80を有する。これらの2つのカメラ部80によって、処理回路170および表示装置160が共用されている。2つのカメラ部80は、ステレオカメラを構成していてもよい。
図11の例では、画像認識装置199は、2つのカメラ部80を有する。これらの2つのカメラ部80によって、処理回路170および表示装置160が共用されている。2つのカメラ部80は、ステレオカメラを構成していてもよい。
2つのカメラ部80の一方の多重露光撮影の条件は、他方の多重露光撮影の条件と異なっていてもよい。そのようにすれば、2並列で図6の認識処理等を実行できる。これにより、高速な画像認識が可能となる。
(実施の形態2)
以下、実施の形態2について説明する。以下では、実施の形態1と重複する説明は省略することがある。
以下、実施の形態2について説明する。以下では、実施の形態1と重複する説明は省略することがある。
実施の形態2では、認識率に代えて、第1被写体の速度に関する値が算出される。具体的には、処理回路170に、第1被写体が多重露光撮影された第1画像が入力される。処理回路170は、第1画像を用いて、第1被写体の速度の推定範囲を算出する。推定範囲は、値V±誤差Eの範囲である。推定範囲が値V±誤差Eの範囲であるとは、推定範囲が値V-誤差E以上、値V+誤差E以下の範囲であることを指す。第1画像は、1つの被写体の像を1個だけ含む画像に比べ、第1被写体の速度の算出精度を確保するのに適している。なお、速度は、絶対値であってもよく、ベクトルであってもよい。
推定範囲についてさらに説明する。現実の速度の推定においては、誤差の存在が考慮されることがある。その場合、速度はある一点の値であるとのピンポイントな推定ではなく、速度はある範囲にあるとの幅のある推定がなされることがある。後者の幅のある推定が、上記推定範囲の算出に対応する。
制御回路120は、誤差Eが誤差閾値よりも大きい場合に、多重露光撮影の条件を変更する。誤差Eが大きいことは、第1被写体の速度の算出精度が低いことを示唆している。実施の形態2では、誤差Eが大きいときに、多重露光撮影の条件を変更する。この変更により、誤差Eを小さくすることができる。つまり、第1被写体の速度の算出精度が高いことが示唆される状況を得ることができる。誤差閾値は、例えば、3%以上20%以下の範囲にある特定の値である。
具体的には、本実施の形態では、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像を用いて、第1被写体の速度の推定範囲を再度算出する。
より具体的には、本実施の形態では、処理回路170による推定範囲の算出と、誤差Eが誤差閾値よりも大きい場合における制御回路120による条件の変更と、が、終了条件が成立するまで繰り返される。
処理回路170は、表示装置160へと、画像と、第1被写体の速度の推定範囲と、を出力する。処理回路170は、表示装置160へと、値Vおよび誤差Eを出力するように構成されていてもよい。また、処理回路170は、制御回路120へと、誤差Eを出力する。
表示装置160は、画像と、第1被写体の速度の推定範囲と、を表示する。表示装置160は、値Vおよび誤差Eを表示するように構成されていてもよい。
制御回路120は、撮像装置100の撮像条件を制御する。制御回路120は、実施の形態1と同様に、多重露光撮影の条件を変更できる。変更される条件は、実施の形態1と同様、条件(a)~(h)からなる群より選択される少なくとも1つを含み得る。また、制御回路120は、画像形成回路130の画像形成条件を制御する。
実施の形態2では、表示装置160は、画像認識装置99の内部表示装置である。このように、画像認識装置99は、第1被写体の速度の推定範囲を表示する内部表示装置を備える。内部表示装置は、具体的には、第1画像と、推定範囲と、を表示し得る。内部表示装置は、値Vおよび誤差Eを表示するように構成されていてもよい。
画像認識装置99は、推定範囲を表示する外付け表示装置へと推定範囲を出力する出力インターフェースを備えていてもよい。具体的には、画像認識装置99は、第1画像と、推定範囲と、を外付け表示装置へと出力する出力インターフェースを備えていてもよい。そして、外付け表示装置は、第1画像と、推定範囲と、を表示するものであってもよい。また、出力インターフェースは、値Vおよび誤差Eを出力するように構成されていてもよい。そして、外付け表示装置は、値Vおよび誤差Eを表示するように構成されていてもよい。
画像認識装置99は、内部表示装置および出力インターフェースの一方を備えていてもよい。画像認識装置99は、これらの両方を備えていてもよい。
実施の形態2でも、実施の形態1と同様、多重露光撮影の条件と第1画像とが対応付けられ得る。
実施の形態2でも、実施の形態1と同様、処理回路170は、教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行う。教師画像は、第1画像に対応する。正解ラベルは、第1被写体の速度に対応する。処理回路170は、教師あり学習後において、第1画像を用いて、第1被写体の速度の推定範囲を算出する。このような処理回路170によれば、第1被写体の速度の算出精度が確保され易い。
実施の形態1の他の技術も、実施の形態2に適用され得る。
[多重露光撮影の条件の変更の仕方の具体例]
実施の形態2では、図12のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図12のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
実施の形態2では、図12のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図12のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
ステップS16において、処理回路170によって、画像に含まれる被写体の速度の推定範囲が算出される。この算出に用いられる画像は、上述の、第1被写体が多重露光撮影された第1画像である場合がある。この場合、処理回路170は、第1画像を用いて、第1被写体の速度の推定範囲を算出する。そして、処理回路170は、誤差Eを、制御回路120へと出力する。ステップS16の後、フローは、ステップS17に進む。
ステップS17において、制御回路120によって、誤差Eが誤差閾値よりも大きいか否かが判定される。誤差Eが誤差閾値よりも大きい場合、フローは、ステップS8に進む。誤差Eが誤差閾値以下である場合、フローは、ステップS2に進む。
実施の形態2のステップS2の終了条件の第1の例は、実施の形態1のステップS2の終了条件の第1の例である。
実施の形態2のステップS2の終了条件の第2の例は、実施の形態1のステップS2の終了条件の第2の例である。
ステップS2の終了条件の第3の例は、直近のステップS16で算出された誤差Eが、第2上限閾値よりも大きいという条件である。誤差Eが第2上限閾値よりも大きい場合、フローは終了する。誤差Eが第2上限閾値以下である場合、フローは、ステップS3に進む。第2上限閾値は、典型的には、誤差閾値よりも大きい。
ステップS2の終了条件の第4の例は、直近のステップS16で算出された誤差Eが、第2下限閾値よりも小さいという条件である。誤差Eが第2下限閾値よりも小さい場合、フローは終了する。誤差Eが第2下限閾値以上である場合、フローは、ステップS3に進む。第2下限閾値は、典型的には、誤差閾値よりも小さい。
第3の例の条件または第4の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。
ステップS2の終了条件の第5の例は、ステップS16で算出された誤差Eが第2上限閾値よりも大きいという状況が連続して第4閾値回数続いているという条件である。この状況が連続して第4閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。なお、この条件は、上記状況をもたらすフレームが連続して第4閾値回数続いて現れるという条件であるとも言える。
ステップS2の終了条件の第6の例は、ステップS16で算出された誤差Eが第2下限閾値よりも小さいという状況が連続して第5閾値回数続いているという条件である。この状況が連続して第5閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。なお、この条件は、上記状況をもたらすフレームが連続して第5閾値回数続いて現れるという条件であるとも言える。
第5の例の条件または第6の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。その場合、第4閾値回数および第5閾値回数は、同じであってもよく、異なっていてもよい。
実施の形態2のステップS2の終了条件の第7の例は、実施の形態1のステップS2の終了条件の第7の例である。
図12のフローチャートに従った多重露光撮影の条件の変更は、速度の算出精度を向上させ得る。この点について、図13Aおよび図13Bを参照して説明する。なお、図13Aおよび図13Bの例では、変更される上記条件は、露光間隔であるものとする。
図13Aに、フレームnにおける多重露光撮影の条件と、フレームn+αにおける多重露光撮影の条件と、を示す。nおよびαは、自然数である。図13Aは、図12のフローチャートに従って、露光間隔が2msから4msに変更されたことを表している。
図13Bに、フレームnにおける値Vおよび誤差Eと、フレームn+αにおける値Vおよび誤差Eと、を示す。両フレームにおいて、値Vは50km/hである。フレームnにおける誤差Eは、15km/hである。フレームn+αにおける誤差Eは、5km/hである。フレームn+αにおける誤差Eは、フレームnにおける誤差Eよりも小さい。図13Bは、図12のフローチャートに従って、第1被写体の速度の算出精度が向上したことを表している。
(実施の形態3)
実施の形態3では、図14のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図14のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
実施の形態3では、図14のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図14のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
ステップS1の後、フローは、ステップS21に進む。ステップS21では、移行条件が成立しているか否かが判定される。移行条件の具体例については後述する。移行条件が成立している場合、フローは、ステップS26に進む。移行条件が成立していない場合、フローは、ステップS22に進む。
ステップS22では、図6のステップS3,S4,S5およびS6が、この順に実行される。ステップS22の後、フローは、ステップS23に進む。
ステップS23において、ステップS6で認識処理が行われたフレームが「開始」から数えて偶数フレームなのか奇数フレームなのかが判定される。このフレームが偶数フレームの場合、フローは、ステップS24に進む。このフレームが奇数フレームの場合、フローは、ステップS25に進む。
ステップS24において、制御回路120によって、多重露光撮影の条件が条件Aに変更される。ステップS24の後、フローは、ステップS21に進む。
ステップS25において、制御回路120によって、多重露光撮影の条件が条件Bに変更される。ステップS25の後、フローは、ステップS21に進む。
この具体例では、ステップS21の移行条件は、「開始」から数えて認識率Aと認識率BがそれぞれJ回得られているという条件である。Jは、自然数である。Jは、例えば1である。認識率Aは、ステップS24で条件Aが採用された状態で、ステップS22のステップS6を実行することにより得られる認識率である。認識率Bは、ステップS25で条件Bが採用された状態で、ステップS22のステップS6を実行することにより得られる認識率である。条件Aと条件Bとは、互いに異なる撮影条件である。
ステップS26において、認識率Aと認識率Bとが比較される。認識率Aが認識率B以上である場合、フローは、ステップS27に進む。認識率Aが認識率Bよりも小さい場合、フローは、ステップS28に進む。
フローがステップS27に進んだ場合、条件Aがベース条件に設定される。フローがステップS28に進んだ場合、条件Bがベース条件に設定される。
上述の説明から理解されるように、認識率Aおよび認識率Bは、ベース条件を設定するのに用いられる。認識率Aおよび認識率Bを、参照用の認識率を称することができる。
ステップS27またはステップS28の後、ステップS29では、図6のステップS3,S4,S5およびS6が、この順に実行される。
ステップS29では、ステップS3の撮像が行われる。条件Aがベース条件に設定された場合、ステップS29の初回の撮像は、多重露光撮影の条件が条件Aに設定された状態で行われる。条件Bがベース条件に設定された場合、ステップS29の初回の撮像は、多重露光撮影の条件が条件Bに設定された状態で行われる。ステップS29の後、フローは、ステップS2に進む。
ステップS2において、実施の形態1と同様、終了条件が成立しているか否かが判定される。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS7に進む。
ステップS7において、実施の形態1と同様、制御回路120によって、認識率が認識率閾値よりも小さいか否かが判定される。認識率が認識率閾値よりも小さい場合、フローは、ステップS8に進む。認識率が認識率閾値以上である場合、フローは、ステップS29に進む。
ステップS8において、実施の形態1と同様、制御回路120によって、多重露光撮影の条件が変更される。ステップS8の後、フローは、ステップS29に進む。
図14のフローチャートによれば、ステップS26において、条件Aと条件Bのどちらによればより高い認識率が得られるのかが分かる。ステップS29において、そのより高い認識率が得られる条件が、初回の多重露光撮影の条件として用いられる。このようにすることは、ステップS29以降において、高い認識率が得られる多重露光撮影の条件を素早く見出す観点から有利である。
図14のフローチャートに従った多重露光撮影の条件変更により、認識率が変化していく。その変化の態様の例を、図15を参照して説明する。なお、図15の例では、変更される上記条件は、露光間隔であるものとする。
図15の例では、フレームNに関するステップS22において、条件Aで多重露光撮影がなされている。
フレームN+1に関するステップS22において、条件Bで多重露光撮影がなされている。
この例では、条件Aおよび条件Bは、露光間隔である。図15の下図に示されているように、フレームN+1の露光間隔は、フレームNの露光間隔よりも短い。このことは、条件Bの露光間隔は、条件Aの露光間隔よりも短いことを意味する。図15の上図に示されているように、フレームN+1の認識率は、フレームNの認識率よりも低い。この状況では、ステップS26で、認識率A≧認識率Bと判定される。そして、フローはステップS27に進み、条件Aがベース条件に設定される。
ベース条件が条件Aであるため、フレームN+2において、条件AでステップS29の多重露光撮影がなされる。そのフレームN+2のステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+3において、フレームN+2の露光間隔よりも長い露光間隔が採用されている。
フレームN+3に関するステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+4において、フレームN+3の露光間隔よりも長い露光間隔が採用されている。
フレームN+4に関するステップS7において、認識率が認識率閾値よりも小さいと判定されている。このため、その次のフレームN+5において、フレームN+4の露光間隔よりも長い露光間隔が採用されている。
図15の例では、フレームN+5において、フレームN+4よりも長い露光間隔が採用された結果、認識率が認識率閾値を超えるに至っている。
このように、実施の形態3では、処理回路170は、認識率の算出を、互いに異なる条件により得られた複数の第1画像について行うことによって、複数の参照用の認識率を算出する。制御回路120は、複数の参照用の認識率を互いに比較することによって、ベースとなる条件であるベース条件を選択する。ベース条件は、例えば、上記互いに異なる条件のうち最も大きい認識率が得られる条件である。処理回路170は、ベース条件により得られた第1画像であって複数の参照用の認識率を算出するための第1画像とは異なる第1画像を用いて、認識率閾値と比較されるべき認識率を算出する。
実施の形態3では、具体的には、多重露光撮影の条件として、条件Aと条件Bとが準備されている。条件Aを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Aを用いて得られた第1画像を用いて、第1画像における第1被写体の認識率である認識率Aを算出する。条件Bを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Bを用いて得られた第1画像を用いて、第1画像における第1被写体の認識率である認識率Bを算出する。制御回路120は、認識率Aと認識率Bとを比較する。制御回路120は、この比較により、ベース条件を選択する。ベース条件は、条件AおよびBのうち、高い認識率が得られたほうの条件である。処理回路170は、ベース条件により得られた第1画像であって認識率Aおよび認識率Bを算出するための第1画像とは異なる第1画像を用いて、認識率閾値と比較されるべき認識率を算出する。
その後、処理回路170は、ベース条件により得られた第1画像を用いて第1被写体の認識率を算出する。制御回路120は、認識率が認識率閾値よりも小さい場合に、多重露光撮影の条件を変更する。具体的には、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像を用いて、認識率を再度算出する。
(実施の形態4)
実施の形態4では、図16のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図16のフローチャートについて、説明する。以下の説明では、図12および/または図14のフローチャートと重複する説明については、省略することがある。
実施の形態4では、図16のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図16のフローチャートについて、説明する。以下の説明では、図12および/または図14のフローチャートと重複する説明については、省略することがある。
ステップS1の後、フローは、ステップS21に進む。ステップS21では、移行条件が成立しているか否かが判定される。移行条件の具体例については後述する。移行条件が成立している場合、フローは、ステップS36に進む。移行条件が成立していない場合、フローは、ステップS32に進む。
ステップS32では、図12のステップS3,S4,S5およびS16が、この順に実行される。ステップS32の後、フローは、ステップS23に進む。
ステップS23において、ステップS16の被写体の速度の算出が行われたフレームが「開始」から数えて偶数フレームなのか奇数フレームなのかが判定される。このフレームが偶数フレームの場合、フローは、ステップS24に進む。このフレームが奇数フレームの場合、フローは、ステップS25に進む。
ステップS24において、制御回路120によって、多重露光撮影の条件が条件Aに変更される。ステップS24の後、フローは、ステップS21に進む。
ステップS25において、制御回路120によって、多重露光撮影の条件が条件Bに変更される。ステップS25の後、フローは、ステップS21に進む。
この具体例では、ステップS21の移行条件は、「開始」から数えて誤差EAと誤差EBがそれぞれK回得られているという条件である。Kは、自然数である。Kは、例えば1である。誤差EAは、ステップS24で条件Aが採用された状態で、ステップS32のステップS16を実行することにより得られる誤差Eである。誤差EBは、ステップS25で条件Bが採用された状態で、ステップS32のステップS16を実行することにより得られる誤差Eである。
ステップS36において、誤差EAと誤差EBとが比較される。誤差EAが誤差EB以下である場合、フローは、ステップS27に進む。誤差EAが誤差EBよりも大きい場合、フローは、ステップS28に進む。
フローがステップS27に進んだ場合、条件Aがベース条件に設定される。フローがステップS28に進んだ場合、条件Bがベース条件に設定される。
上述の説明から理解されるように、誤差EAおよび誤差EBは、ベース条件を設定するのに用いられる。誤差EAおよび誤差EBを、参照用の誤差Eを称することができる。
ステップS27またはステップS28の後、ステップS39では、図12のステップS3,S4,S5およびS16が、この順に実行される。
ステップS39では、ステップS3の撮像が行われる。条件Aがベース条件に設定された場合、ステップS39の初回の撮像は、多重露光撮影の条件が条件Aに設定された状態で行われる。条件Bがベース条件に設定された場合、ステップS39の初回の撮像は、多重露光撮影の条件が条件Bに設定された状態で行われる。ステップS39の後、フローは、ステップS2に進む。
ステップS2において、実施の形態2と同様、終了条件が成立しているか否かが判定される。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS17に進む。
ステップS17において、実施の形態2と同様、制御回路120によって、誤差Eが誤差閾値よりも小さいか否かが判定される。誤差Eが誤差閾値よりも大きい場合、フローは、ステップS8に進む。誤差Eが誤差閾値以下である場合、フローは、ステップS39に進む。
ステップS8において、実施の形態2と同様、制御回路120によって、多重露光撮影の条件が変更される。ステップS8の後、フローは、ステップS39に進む。
図16のフローチャートによれば、ステップS36において、条件Aと条件Bのどちらによればより小さい誤差Eが得られるのかが分かる。ステップS39において、そのより小さい誤差Eが得られる条件が、初回の多重露光撮影の条件として用いられる。このようにすることは、ステップS39以降において、小さい誤差Eが得られる多重露光撮影の条件を素早く見出す観点から有利である。
このように、実施の形態4では、処理回路170は、推定範囲の算出を、互いに異なる条件により得られた複数の第1画像について行うことによって、複数の参照用の誤差Eを算出する。制御回路120は、複数の参照用の誤差Eを互いに比較することによって、ベースとなる条件であるベース条件を選択する。ベース条件は、例えば、上記互いに異なる条件のうち最も小さい誤差Eが得られる条件である。処理回路170は、ベース条件により得られた第1画像であって複数の参照用の誤差Eを算出するための第1画像とは異なる第1画像を用いて、誤差閾値と比較されるべき誤差Eを算出する。
実施の形態4では、具体的には、多重露光撮影の条件として、条件Aと条件Bとが準備されている。条件Aを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Aを用いて得られた第1画像を用いて、誤差Eである誤差EAを算出する。条件Bを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Bを用いて得られた第1画像を用いて、誤差Eである誤差EBを算出する。制御回路120は、誤差EAと誤差EBとを比較する。制御回路120は、この比較により、ベース条件を選択する。ベース条件は、条件AおよびBのうち、小さい誤差Eが得られたほうの条件である。処理回路170は、ベース条件により得られた第1画像であって誤差EAおよび誤差EBを算出するための第1画像とは異なる第1画像を用いて、誤差閾値と比較されるべき誤差Eを算出する。
その後、処理回路170は、ベース条件により得られた第1画像を用いて、第1被写体の速度の推定範囲を算出する。制御回路120は、誤差Eが誤差閾値よりも大きい場合に、多重露光撮影の条件を変更する。具体的には、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像を用いて、推定範囲を再度算出する。
(参考実施形態1)
参考実施形態1では、図17のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図17のフローチャートについて、説明する。以下の説明では、図6および/または図14のフローチャートと重複する説明については、省略することがある。
参考実施形態1では、図17のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図17のフローチャートについて、説明する。以下の説明では、図6および/または図14のフローチャートと重複する説明については、省略することがある。
ステップS1の後、フローは、ステップS2に進む。ステップS2において、実施の形態1と同様、終了条件が成立しているか否かが判定される。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS3に進む。
実施の形態1と同様、図6のステップS3,S4,S5およびS6が、この順に実行される。ステップS6の後、フローは、ステップS23に進む。
ステップS23において、実施の形態3と同様、ステップS6で認識処理が行われたフレームが「開始」から数えて偶数フレームなのか奇数フレームなのかが判定される。このフレームが偶数フレームの場合、フローは、ステップS24に進む。このフレームが奇数フレームの場合、フローは、ステップS25に進む。
ステップS24において、実施の形態3と同様、制御回路120によって、多重露光撮影の条件が条件Aに変更される。ステップS24の後、フローは、ステップS2に進む。
ステップS25において、実施の形態3と同様、制御回路120によって、多重露光撮影の条件が条件Bに変更される。ステップS25の後、フローは、ステップS2に進む。
図17のフローチャートに従った多重露光撮影の条件変更により、認識率が変化していく。その変化の態様の例を、図18を参照して説明する。なお、図18の例では、変更される上記条件は、露光間隔であるものとする。
図18の例では、フレームN,N+2およびN+4に関するステップS3において、条件Aで多重露光撮影がなされている。フレームN+1,N+3およびN+5に関するステップS3において、条件Bで多重露光撮影がなされている。
この例では、条件Aおよび条件Bは、露光間隔である。図18に示されているように、フレームN+1の露光間隔は、フレームNの露光間隔よりも短い。このことは、条件Bの露光間隔は、条件Aの露光間隔よりも短いことを意味する。
このように、図18の例では、長い露光間隔での多重露光撮影と、短い露光間隔での多重露光撮影と、が繰り返される。典型的には、どちらかの露光間隔によって、高い認識率が得られる。このようにすれば、高い認識率が得られる条件が見出されるまでに実行されるフローチャートの繰り返し数を削減できる。この点で、図18の例は、図6の例よりも有利であり得る。
このように、参考実施形態1では、画像認識装置99は、処理回路170と、制御回路120と、を備える。処理回路170は、第1被写体が多重露光撮影された第1画像が入力され、第1画像を用いて第1被写体の認識率を算出する。制御回路120は、多重露光撮影の条件を変更する。処理回路170は、認識率の算出を、互いに異なる条件により得られた複数の第1画像について行うことによって、複数の認識率を算出する。
具体的には、多重露光撮影の条件として、条件Aと条件Bとが準備されている。条件Aを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Aを用いて得られた第1画像を用いて、第1画像における第1被写体の認識率を算出する。条件Bを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Bを用いて得られた第1画像を用いて、第1画像における第1被写体の認識率を算出する。
(参考実施形態2)
参考実施形態2では、図19のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図19のフローチャートについて、説明する。以下の説明では、図12および/または図17のフローチャートと重複する説明については、省略することがある。
参考実施形態2では、図19のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図19のフローチャートについて、説明する。以下の説明では、図12および/または図17のフローチャートと重複する説明については、省略することがある。
ステップS1の後、フローは、ステップS2に進む。ステップS2において、実施の形態2と同様、終了条件が成立しているか否かが判定される。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS3に進む。
実施の形態2と同様、図6のステップS3,S4,S5およびS16が、この順に実行される。ステップS16の後、フローは、ステップS23に進む。
ステップS23において、実施の形態4と同様、ステップS16で被写体の速度の算出が行われたフレームが「開始」から数えて偶数フレームなのか奇数フレームなのかが判定される。このフレームが偶数フレームの場合、フローは、ステップS24に進む。このフレームが奇数フレームの場合、フローは、ステップS25に進む。
ステップS24において、実施の形態4と同様、制御回路120によって、多重露光撮影の条件が条件Aに変更される。ステップS24の後、フローは、ステップS2に進む。
ステップS25において、実施の形態4と同様、制御回路120によって、多重露光撮影の条件が条件Bに変更される。ステップS25の後、フローは、ステップS2に進む。
このように、参考実施形態2では、画像認識装置99は、処理回路170と、制御回路120と、を備える。処理回路170は、第1被写体が多重露光撮影された第1画像が入力され、第1画像を用いて、第1被写体の速度の推定範囲を算出する。制御回路120は、多重露光撮影の条件を変更する。処理回路170は、推定範囲の算出を、互いに異なる条件により得られた複数の第1画像について行うことによって、複数の誤差Eを算出する。
具体的には、多重露光撮影の条件として、条件Aと条件Bとが準備されている。条件Aを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Aを用いて得られた第1画像を用いて、第1被写体の速度の推定範囲を算出する。条件Bを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Bを用いて得られた第1画像を用いて、推定範囲を算出する。
(実施の形態5)
以下、実施の形態5について説明する。以下では、実施の形態1および2と重複する説明は省略することがある。
以下、実施の形態5について説明する。以下では、実施の形態1および2と重複する説明は省略することがある。
実施の形態5では、第1被写体の速度に代えて、第1被写体を基準としたときの撮影装置100の相対速度に関する値が算出される。第1被写体として静止している被写体を選択してもよい。その場合には、算出された撮影装置100の相対速度は、撮影装置100の速度、すなわち撮影装置100が設置された移動体、例えば車両の速度である。本実施の形態では、静止している第1被写体を撮像することにより、撮像装置100が設置された移動体の速度に関する値が算出される。具体的には、処理回路170に、第1被写体が多重露光撮影された第1画像が入力される。処理回路170は、第1画像と、第1被写体までの距離情報とを用いて、撮像装置100が設置された移動体の速度の推定範囲を算出する。第1被写体までの距離情報は、例えばステレオカメラ、TOF(Time of Flight)センサ、レーザーレーダーおよびソナーなどの装置によって取得してもよい。
また、第1被写体が一定の大きさを有するものである場合には、第1画像における第1被写体の大きさに基づいて第1被写体までの距離情報を取得してもよい。なお、多重露光撮影された画像から撮像装置100が設置された移動体の速度を算出する技術については、例えば、国際公開公報WO2018/139212号および米国出願公開公報2019/0113332号に記載されている。国際公開公報WO2018/139212号および米国出願公開公報2019/0113332号の開示内容の全てを、参考のために本明細書に援用する。推定範囲は、値V±誤差Eの範囲である。推定範囲が値V±誤差Eの範囲であるとは、推定範囲が値V-誤差E以上、値V+誤差E以下の範囲であることを指す。第1画像は、1つの被写体の像を1個だけ含む画像に比べ、第1被写体の速度の算出精度を確保するのに適している。なお、速度は、絶対値であってもよく、ベクトルであってもよい。
推定範囲についてさらに説明する。現実の速度の推定においては、誤差の存在が考慮されることがある。その場合、速度はある一点の値であるとのピンポイントな推定ではなく、速度はある範囲にあるとの幅のある推定がなされることがある。後者の幅のある推定が、上記推定範囲の算出に対応する。
制御回路120は、誤差Eが誤差閾値よりも大きい場合に、多重露光撮影の条件を変更する。誤差Eが大きいことは、撮像装置100が設置された移動体の速度の算出精度が低いことを示唆している。実施の形態5では、誤差Eが大きいときに、多重露光撮影の条件を変更する。この変更により、誤差Eを小さくすることができる。つまり、撮像装置100が設置された移動体の速度の算出精度が高いことが示唆される状況を得ることができる。誤差閾値は、例えば、3%以上20%以下の範囲にある特定の値である。
具体的には、本実施の形態では、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像と第1被写体までの距離情報とを用いて、撮像装置100が設置された移動体の速度の推定範囲を再度算出する。
より具体的には、本実施の形態では、処理回路170による推定範囲の算出と、誤差Eが誤差閾値よりも大きい場合における制御回路120による条件の変更と、が、終了条件が成立するまで繰り返される。
処理回路170は、表示装置160へと、画像と、撮像装置100が設置された移動体の速度の推定範囲と、を出力する。処理回路170は、表示装置160へと、値Vおよび誤差Eを出力するように構成されていてもよい。また、処理回路170は、制御回路120へと、誤差Eを出力する。
表示装置160は、画像と、撮像装置100が設置された移動体の速度の推定範囲と、を表示する。表示装置160は、値Vおよび誤差Eを表示するように構成されていてもよい。
制御回路120は、撮像装置100の撮像条件を制御する。制御回路120は、実施の形態1と同様に、多重露光撮影の条件を変更できる。変更される条件は、実施の形態1と同様、条件(a)~(h)からなる群より選択される少なくとも1つを含み得る。また、制御回路120は、画像形成回路130の画像形成条件を制御する。
実施の形態5では、表示装置160は、画像認識装置99の内部表示装置である。このように、画像認識装置99は、撮像装置100が設置された移動体の速度の推定範囲を表示する内部表示装置を備える。内部表示装置は、具体的には、第1画像と、推定範囲と、を表示し得る。内部表示装置は、値Vおよび誤差Eを表示するように構成されていてもよい。
画像認識装置99は、推定範囲を表示する外付け表示装置へと推定範囲を出力する出力インターフェースを備えていてもよい。具体的には、画像認識装置99は、第1画像と、推定範囲と、を外付け表示装置へと出力する出力インターフェースを備えていてもよい。そして、外付け表示装置は、第1画像と、推定範囲と、を表示するものであってもよい。また、出力インターフェースは、値Vおよび誤差Eを出力するように構成されていてもよい。そして、外付け表示装置は、値Vおよび誤差Eを表示するように構成されていてもよい。
画像認識装置99は、内部表示装置および出力インターフェースの一方を備えていてもよい。画像認識装置99は、これらの両方を備えていてもよい。
実施の形態5でも、実施の形態1と同様、多重露光撮影の条件と第1画像とが対応付けられ得る。
実施の形態5でも、実施の形態1と同様、処理回路170は、教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行う。教師画像は、第1画像に対応する。正解ラベルは、撮像装置100が設置された移動体の速度に対応する。処理回路170は、教師あり学習後において、第1画像を用いて、撮像装置100が設置された移動体の速度の推定範囲を算出する。このような処理回路170によれば、撮像装置100が設置された移動体の速度の算出精度が確保され易い。
実施の形態1の他の技術も、実施の形態5に適用され得る。
[多重露光撮影の条件の変更の仕方の具体例]
実施の形態5では、図20のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図20のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
実施の形態5では、図20のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図20のフローチャートについて、説明する。以下の説明では、図6のフローチャートと重複する説明については、省略することがある。
ステップS46において、処理回路170によって、画像に含まれる被写体のうち建物や標識などの静止した被写体が特定され、その被写体を基準としたときの撮像装置100が設置された移動体の速度の推定範囲が算出される。この算出に用いられる画像は、上述の、第1被写体が多重露光撮影された第1画像である場合がある。この場合、処理回路170は、第1画像を用いて、第1被写体を基準としたときの撮像装置100が設置された移動体の速度の推定範囲を算出する。そして、処理回路170は、誤差Eを、制御回路120へと出力する。ステップS16の後、フローは、ステップS17に進む。
ステップS17において、制御回路120によって、誤差Eが誤差閾値よりも大きいか否かが判定される。誤差Eが誤差閾値よりも大きい場合、フローは、ステップS8に進む。誤差Eが誤差閾値以下である場合、フローは、ステップS2に進む。
実施の形態5のステップS2の終了条件の第1の例は、実施の形態1のステップS2の終了条件の第1の例である。
実施の形態5のステップS2の終了条件の第2の例は、実施の形態1のステップS2の終了条件の第2の例である。
ステップS2の終了条件の第3の例は、直近のステップS46で算出された誤差Eが、第2上限閾値よりも大きいという条件である。誤差Eが第2上限閾値よりも大きい場合、フローは終了する。誤差Eが第2上限閾値以下である場合、フローは、ステップS3に進む。第2上限閾値は、典型的には、誤差閾値よりも大きい。
ステップS2の終了条件の第4の例は、直近のステップS46で算出された誤差Eが、第2下限閾値よりも小さいという条件である。誤差Eが第2下限閾値よりも小さい場合、フローは終了する。誤差Eが第2下限閾値以上である場合、フローは、ステップS3に進む。第2下限閾値は、典型的には、誤差閾値よりも小さい。
第3の例の条件または第4の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。
ステップS2の終了条件の第5の例は、ステップS46で算出された誤差Eが第2上限閾値よりも大きいという状況が連続して第4閾値回数続いているという条件である。この状況が連続して第4閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。なお、この条件は、上記状況をもたらすフレームが連続して第4閾値回数続いて現れるという条件であるとも言える。
ステップS2の終了条件の第6の例は、ステップS46で算出された誤差Eが第2下限閾値よりも小さいという状況が連続して第5閾値回数続いているという条件である。この状況が連続して第5閾値回数続いている場合、フローは終了する。そうでない場合、フローは、ステップS3に進む。なお、この条件は、上記状況をもたらすフレームが連続して第5閾値回数続いて現れるという条件であるとも言える。
第5の例の条件または第6の例の条件が成立している場合にフローを終了させ、そうでない場合にフローをステップS3に進めてもよい。その場合、第4閾値回数および第5閾値回数は、同じであってもよく、異なっていてもよい。
実施の形態2のステップS2の終了条件の第7の例は、実施の形態1のステップS2の終了条件の第7の例である。
図20のフローチャートに従った多重露光撮影の条件の変更は、速度の算出精度を向上させ得る。この点について、図21Aおよび図21Bを参照して説明する。なお、図21Aおよび図21Bの例では、変更される上記条件は、露光間隔であるものとする。
図21Aに、フレームnにおける多重露光撮影の条件と、フレームn+αにおける多重露光撮影の条件と、を示す。nおよびαは、自然数である。図21Aは、図20のフローチャートに従って、露光間隔が2msから4msに変更されたことを表している。
図21Bに、フレームnにおける値Vおよび誤差Eと、フレームn+αにおける値Vおよび誤差Eと、を示す。両フレームにおいて、値Vは50km/hである。フレームnにおける誤差Eは、15km/hである。フレームn+αにおける誤差Eは、5km/hである。フレームn+αにおける誤差Eは、フレームnにおける誤差Eよりも小さい。図21Bは、図20のフローチャートに従って、撮像装置100が設置された移動体の算出精度が向上したことを表している。
(実施の形態6)
実施の形態6では、図22のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図22のフローチャートについて、説明する。以下の説明では、図20および/または図14のフローチャートと重複する説明については、省略することがある。
実施の形態6では、図22のフローチャートに従って、多重露光撮影の条件が変更され得る。以下、図22のフローチャートについて、説明する。以下の説明では、図20および/または図14のフローチャートと重複する説明については、省略することがある。
ステップS1の後、フローは、ステップS21に進む。ステップS21では、移行条件が成立しているか否かが判定される。移行条件の具体例については後述する。移行条件が成立している場合、フローは、ステップS36に進む。移行条件が成立していない場合、フローは、ステップS42に進む。
ステップS42では、図20のステップS3,S4,S5およびS46が、この順に実行される。ステップS42の後、フローは、ステップS23に進む。
ステップS23において、ステップS46の撮像装置100が設置された移動体の速度の算出が行われたフレームが「開始」から数えて偶数フレームなのか奇数フレームなのかが判定される。このフレームが偶数フレームの場合、フローは、ステップS24に進む。このフレームが奇数フレームの場合、フローは、ステップS25に進む。
ステップS24において、制御回路120によって、多重露光撮影の条件が条件Aに変更される。ステップS24の後、フローは、ステップS21に進む。
ステップS25において、制御回路120によって、多重露光撮影の条件が条件Bに変更される。ステップS25の後、フローは、ステップS21に進む。
この具体例では、ステップS21の移行条件は、「開始」から数えて誤差EAと誤差EBがそれぞれK回得られているという条件である。Kは、自然数である。Kは、例えば1である。誤差EAは、ステップS24で条件Aが採用された状態で、ステップS42のステップS16を実行することにより得られる誤差Eである。誤差EBは、ステップS25で条件Bが採用された状態で、ステップS42のステップS16を実行することにより得られる誤差Eである。
ステップS36において、誤差EAと誤差EBとが比較される。誤差EAが誤差EB以下である場合、フローは、ステップS27に進む。誤差EAが誤差EBよりも大きい場合、フローは、ステップS28に進む。
フローがステップS27に進んだ場合、条件Aがベース条件に設定される。フローがステップS28に進んだ場合、条件Bがベース条件に設定される。
上述の説明から理解されるように、誤差EAおよび誤差EBは、ベース条件を設定するのに用いられる。誤差EAおよび誤差EBを、参照用の誤差Eを称することができる。
ステップS27またはステップS28の後、ステップS49では、図20のステップS3,S4,S5およびS16が、この順に実行される。
ステップS49では、ステップS3の撮像が行われる。条件Aがベース条件に設定された場合、ステップS49の初回の撮像は、多重露光撮影の条件が条件Aに設定された状態で行われる。条件Bがベース条件に設定された場合、ステップS49の初回の撮像は、多重露光撮影の条件が条件Bに設定された状態で行われる。ステップS49の後、フローは、ステップS2に進む。
ステップS2において、実施の形態4と同様、終了条件が成立しているか否かが判定される。終了条件が成立している場合、フローは終了する。終了条件が成立していない場合、フローは、ステップS17に進む。
ステップS17において、実施の形態4と同様、制御回路120によって、誤差Eが誤差閾値よりも小さいか否かが判定される。誤差Eが誤差閾値よりも大きい場合、フローは、ステップS8に進む。誤差Eが誤差閾値以下である場合、フローは、ステップS49に進む。
ステップS8において、実施の形態4と同様、制御回路120によって、多重露光撮影の条件が変更される。ステップS8の後、フローは、ステップS49に進む。
図22のフローチャートによれば、ステップS36において、条件Aと条件Bのどちらによればより小さい誤差Eが得られるのかが分かる。ステップS49において、そのより小さい誤差Eが得られる条件が、初回の多重露光撮影の条件として用いられる。このようにすることは、ステップS49以降において、小さい誤差Eが得られる多重露光撮影の条件を素早く見出す観点から有利である。
このように、実施の形態6では、処理回路170は、推定範囲の算出を、互いに異なる条件により得られた複数の第1画像について行うことによって、複数の参照用の誤差Eを算出する。制御回路120は、複数の参照用の誤差Eを互いに比較することによって、ベースとなる条件であるベース条件を選択する。ベース条件は、例えば、上記互いに異なる条件のうち最も小さい誤差Eが得られる条件である。処理回路170は、ベース条件により得られた第1画像であって複数の参照用の誤差Eを算出するための第1画像とは異なる第1画像を用いて、誤差閾値と比較されるべき誤差Eを算出する。
実施の形態6では、具体的には、多重露光撮影の条件として、条件Aと条件Bとが準備されている。条件Aを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Aを用いて得られた第1画像を用いて、誤差Eである誤差EAを算出する。条件Bを用いて、第1被写体が多重露光撮影される。処理回路170は、条件Bを用いて得られた第1画像を用いて、誤差Eである誤差EBを算出する。制御回路120は、誤差EAと誤差EBとを比較する。制御回路120は、この比較により、ベース条件を選択する。ベース条件は、条件AおよびBのうち、小さい誤差Eが得られたほうの条件である。処理回路170は、ベース条件により得られた第1画像であって誤差EAおよび誤差EBを算出するための第1画像とは異なる第1画像を用いて、誤差閾値と比較されるべき誤差Eを算出する。
その後、処理回路170は、ベース条件により得られた第1画像を用いて、第1被写体の速度の推定範囲を算出する。制御回路120は、誤差Eが誤差閾値よりも大きい場合に、多重露光撮影の条件を変更する。具体的には、多重露光撮影の条件が変更された場合において、その変更が反映された第1画像が、処理回路170に入力される。処理回路170は、その第1画像を用いて、推定範囲を再度算出する。
本開示による画像認識装置は、自動運転車、産業用ロボット、民生用ロボットなど様々な画像認識システムへの利用が可能である。
80 カメラ部
99,199 画像認識装置
100 撮像装置
110 光学系
120 制御回路
130 画像形成回路
140 出力バッファ
151 フレームメモリ
152 フレーム加算回路
160 表示装置
170 処理回路
A,B,C,D 被写体
99,199 画像認識装置
100 撮像装置
110 光学系
120 制御回路
130 画像形成回路
140 出力バッファ
151 フレームメモリ
152 フレーム加算回路
160 表示装置
170 処理回路
A,B,C,D 被写体
Claims (16)
- 第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて前記第1被写体の認識率を算出する処理回路と、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える、画像認識装置。 - 前記認識率が前記認識率閾値よりも小さい場合に変更される前記条件は、
(a)前記第1画像を得るにあたって採用される各露光期間の長さ、
(b)前記第1画像を得るにあたって採用される各露光間隔の長さ、
(c)前記第1画像を得るにあたって採用される露光回数、
(d)前記第1画像の露光感度、
(e)前記第1画像を得るのに用いられる撮像装置のゲイン、
(f)前記第1画像を得るのに用いられる撮像装置の焦点距離、
(g)前記第1画像を得るのに用いられる撮像装置の絞り、および
(h)前記第1画像の出力解像度、
からなる群より選択される少なくとも1つを含む、請求項1に記載の画像認識装置。 - 前記認識率を表示する内蔵表示装置、および、前記認識率を表示する外付け表示装置へと前記認識率を出力する出力インターフェースから選ばれる少なくとも1つをさらに備える、請求項1または2に記載の画像認識装置。
- 前記第1画像を得るのに用いられる撮像装置をさらに備える、請求項1から3のいずれか1項に記載の画像認識装置。
- 前記条件と前記第1画像とが対応付けられる、請求項1から4のいずれか1項に記載の画像認識装置。
- 前記第1画像と対応付けられる前記条件として、前記制御回路において保持されている前記条件が用いられる、請求項5に記載の画像認識装置。
- 前記第1画像を得るのに用いられる撮像装置をさらに備え、
前記第1画像と対応付けられる前記条件として、前記撮像装置において保持されている前記条件が用いられる、請求項5に記載の画像認識装置。 - 前記処理回路は、前記第1画像および前記第1被写体の物体名にそれぞれ対応する教師画像および正解ラベルの組み合わせを複数組用いた教師あり学習を行い、前記教師あり学習後において、前記第1画像を用いて前記認識率を算出する、請求項1から7のいずれか1項に記載の画像認識装置。
- 前記教師画像を得るのに用いられる第2撮像装置をさらに備える、請求項8に記載の画像認識装置。
- 前記処理回路は、ニューラルネットワークで表現される演算モデルを読み込んでおり、
前記処理回路は、前記教師あり学習を行い、前記教師あり学習後において、前記第1画像を用いて前記認識率を算出する、請求項8または9に記載の画像認識装置。 - 前記処理回路による前記認識率の算出と、前記認識率が前記認識率閾値よりも小さい場合における前記制御回路による前記条件の変更と、が、終了条件が成立するまで繰り返される、請求項1から10のいずれか1項に記載の画像認識装置。
- 前記処理回路は、前記認識率である第1認識率であって前記第1被写体が第1物体であることの確からしさを表す第1認識率と、前記第1被写体が第2物体であることの確からしさを表す第2認識率と、を算出し、
前記制御回路は、前記第1認識率から前記第2認識率を差し引いた差分がZ以下である場合にも、前記多重露光撮影の条件を変更する、請求項1から11のいずれか1項に記載の画像認識装置。
ここで、Zは、0以上の値である。 - 前記処理回路は、前記認識率の算出を、互いに異なる前記条件により得られた複数の前記第1画像について行うことによって、複数の参照用の前記認識率を算出し、
前記制御回路は、複数の参照用の前記認識率を互いに比較することによって、ベースとなる前記条件であるベース条件を選択し、
前記処理回路は、前記ベース条件により得られた前記第1画像であって複数の参照用の前記認識率を算出するための前記第1画像とは異なる前記第1画像を用いて、前記認識率閾値と比較されるべき前記認識率を算出する、請求項1から12のいずれか1項に記載の画像認識装置。 - 第1被写体が多重露光撮影された第1画像が入力され、前記第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出する処理回路と、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更する制御回路と、
を備える、画像認識装置。 - 第1被写体が多重露光撮影された第1画像を用いて前記第1被写体の認識率を算出することと、
前記認識率が認識率閾値よりも小さい場合に、前記多重露光撮影の条件を変更することと、を含む、画像認識方法。 - 第1被写体が多重露光撮影された第1画像を用いて、前記第1被写体の速度の推定範囲であって値V±誤差Eの範囲である推定範囲を算出することと、
前記誤差Eが誤差閾値よりも大きい場合に、前記多重露光撮影の条件を変更することと、を含む、画像認識方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018202188 | 2018-10-26 | ||
| JP2018202188 | 2018-10-26 | ||
| PCT/JP2019/039070 WO2020085028A1 (ja) | 2018-10-26 | 2019-10-03 | 画像認識装置および画像認識方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020085028A1 JPWO2020085028A1 (ja) | 2021-09-30 |
| JP7345101B2 true JP7345101B2 (ja) | 2023-09-15 |
Family
ID=70330960
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020553045A Active JP7345101B2 (ja) | 2018-10-26 | 2019-10-03 | 画像認識装置および画像認識方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11394889B2 (ja) |
| JP (1) | JP7345101B2 (ja) |
| CN (1) | CN112385208A (ja) |
| WO (1) | WO2020085028A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11493914B2 (en) * | 2020-06-26 | 2022-11-08 | Intel Corporation | Technology to handle ambiguity in automated control systems |
| US20230039592A1 (en) * | 2021-08-04 | 2023-02-09 | Sony Semiconductor Solutions Corporation | Image sensor with integrated efficient multiresolution hierarchical deep neural network (dnn) |
| WO2023149295A1 (ja) * | 2022-02-01 | 2023-08-10 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008167299A (ja) | 2006-12-28 | 2008-07-17 | Casio Comput Co Ltd | 撮影装置及びそのプログラム |
| JP2010066221A (ja) | 2008-09-12 | 2010-03-25 | Calsonic Kansei Corp | 車両用距離画像データ生成装置 |
| US20100171837A1 (en) | 2006-04-06 | 2010-07-08 | Pillman Bruce H | Varying camera self-determination based on subject motion |
| US20120120263A1 (en) | 2010-11-16 | 2012-05-17 | Altek Corporation | Image Capturing Device and Exposure Time Adjusting Method Thereof |
| US9549125B1 (en) | 2015-09-01 | 2017-01-17 | Amazon Technologies, Inc. | Focus specification and focus stabilization |
| JP2018005682A (ja) | 2016-07-05 | 2018-01-11 | 日立オートモティブシステムズ株式会社 | 画像処理装置 |
| WO2018021035A1 (ja) | 2016-07-26 | 2018-02-01 | ソニー株式会社 | 画像処理装置および方法、内視鏡システム、並びにプログラム |
| JP2018160785A (ja) | 2017-03-22 | 2018-10-11 | パナソニックIpマネジメント株式会社 | 画像生成装置、画像生成方法、プログラム及びそれを記録した記録媒体 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3238816B2 (ja) | 1993-12-24 | 2001-12-17 | キヤノン株式会社 | 撮像装置 |
| JP2002027315A (ja) | 2000-07-07 | 2002-01-25 | Sony Corp | 動き検出装置及び動き検出方法 |
| JP3565338B2 (ja) * | 2001-04-11 | 2004-09-15 | 日本電気株式会社 | 赤外線撮像装置及びドリフト補正方法 |
| JP2007306436A (ja) * | 2006-05-12 | 2007-11-22 | Sharp Corp | 撮像装置 |
| JP2008206021A (ja) * | 2007-02-22 | 2008-09-04 | Matsushita Electric Ind Co Ltd | 撮像装置及びレンズ鏡筒 |
| JP4895204B2 (ja) | 2007-03-22 | 2012-03-14 | 富士フイルム株式会社 | 画像成分分離装置、方法、およびプログラム、ならびに、正常画像生成装置、方法、およびプログラム |
| JP5515871B2 (ja) * | 2010-03-05 | 2014-06-11 | 株式会社豊田中央研究所 | 物体認識装置及びプログラム |
| JP2011244144A (ja) * | 2010-05-17 | 2011-12-01 | Panasonic Corp | 撮像装置 |
| JP2015192222A (ja) | 2014-03-27 | 2015-11-02 | パナソニックIpマネジメント株式会社 | 撮像装置及び撮像制御方法 |
| JP6351452B2 (ja) * | 2014-09-08 | 2018-07-04 | オリンパス株式会社 | 撮像装置、撮像方法およびプログラム |
| JP6537385B2 (ja) | 2015-07-17 | 2019-07-03 | 日立オートモティブシステムズ株式会社 | 車載環境認識装置 |
| EP3386189B1 (en) | 2015-12-03 | 2021-03-24 | Panasonic Intellectual Property Management Co., Ltd. | Image-capture device |
| JP6685843B2 (ja) * | 2016-06-06 | 2020-04-22 | オリンパス株式会社 | 撮像装置 |
| JP2018005520A (ja) | 2016-06-30 | 2018-01-11 | クラリオン株式会社 | 物体検出装置及び物体検出方法 |
-
2019
- 2019-10-03 WO PCT/JP2019/039070 patent/WO2020085028A1/ja active Application Filing
- 2019-10-03 CN CN201980045952.6A patent/CN112385208A/zh active Pending
- 2019-10-03 JP JP2020553045A patent/JP7345101B2/ja active Active
-
2021
- 2021-03-10 US US17/198,191 patent/US11394889B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100171837A1 (en) | 2006-04-06 | 2010-07-08 | Pillman Bruce H | Varying camera self-determination based on subject motion |
| JP2008167299A (ja) | 2006-12-28 | 2008-07-17 | Casio Comput Co Ltd | 撮影装置及びそのプログラム |
| JP2010066221A (ja) | 2008-09-12 | 2010-03-25 | Calsonic Kansei Corp | 車両用距離画像データ生成装置 |
| US20120120263A1 (en) | 2010-11-16 | 2012-05-17 | Altek Corporation | Image Capturing Device and Exposure Time Adjusting Method Thereof |
| US9549125B1 (en) | 2015-09-01 | 2017-01-17 | Amazon Technologies, Inc. | Focus specification and focus stabilization |
| JP2018005682A (ja) | 2016-07-05 | 2018-01-11 | 日立オートモティブシステムズ株式会社 | 画像処理装置 |
| WO2018021035A1 (ja) | 2016-07-26 | 2018-02-01 | ソニー株式会社 | 画像処理装置および方法、内視鏡システム、並びにプログラム |
| JP2018160785A (ja) | 2017-03-22 | 2018-10-11 | パナソニックIpマネジメント株式会社 | 画像生成装置、画像生成方法、プログラム及びそれを記録した記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210195085A1 (en) | 2021-06-24 |
| WO2020085028A1 (ja) | 2020-04-30 |
| JPWO2020085028A1 (ja) | 2021-09-30 |
| US11394889B2 (en) | 2022-07-19 |
| CN112385208A (zh) | 2021-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7345101B2 (ja) | 画像認識装置および画像認識方法 | |
| CN111741211B (zh) | 图像显示方法和设备 | |
| EP2698766B1 (en) | Motion estimation device, depth estimation device, and motion estimation method | |
| JP7362284B2 (ja) | 画像処理方法、画像処理装置、プログラム、画像処理システム、および、学習済みモデルの製造方法 | |
| CN109858309B (zh) | 一种识别道路线的方法和装置 | |
| CN110248097A (zh) | 追焦方法、装置、终端设备、计算机可读存储介质 | |
| JP2016046666A (ja) | 撮像装置およびその制御方法、並びにプログラム | |
| JP2007081682A (ja) | 画像処理装置、画像処理方法、及び、情報処理装置が実行可能なプログラム | |
| KR102320999B1 (ko) | 폴트 톨러런스 및 플럭츄에이션 로버스트를 위한 복수의 뉴럴 네트워크를 사용하여 흔들리는 카메라로 인해 생성된 비디오에서 지터링을 제거하기 위한 학습 방법 및 학습 장치, 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| CN115867940A (zh) | 从3d边界框的单眼深度监督 | |
| CN114612556A (zh) | 视觉惯性里程计模型的训练方法、位姿估计方法及装置 | |
| CN114531546A (zh) | 镜头调整方法及装置、存储介质及电子设备 | |
| US20210127068A1 (en) | Main subject determining apparatus, image capturing apparatus, main subject determining method, and storage medium | |
| JP7401246B2 (ja) | 撮像装置、撮像装置の制御方法、及びプログラム | |
| CN112287805A (zh) | 运动物体的检测方法、装置、可读存储介质及电子设备 | |
| CN114885112B (zh) | 基于数据融合的高帧率视频生成方法及装置 | |
| US20190098215A1 (en) | Image blur correction device and control method | |
| JP6602089B2 (ja) | 画像処理装置及びその制御方法 | |
| JP7452620B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| CN115191928A (zh) | 信息处理装置、信息处理方法、学习方法以及存储介质 | |
| CN113610884A (zh) | 图像处理方法、装置、电子设备及计算机可读存储介质 | |
| JP7013205B2 (ja) | 像振れ補正装置およびその制御方法、撮像装置 | |
| JP5279453B2 (ja) | 画像振れ補正装置、撮像装置及び画像振れ補正方法 | |
| WO2023149295A1 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| WO2024009377A1 (ja) | 情報処理装置、自己位置推定方法、及び非一時的なコンピュータ可読媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230823 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7345101 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |