JP7344660B2 - 視差算出装置、視差算出方法及び視差算出装置の制御プログラム - Google Patents
視差算出装置、視差算出方法及び視差算出装置の制御プログラム Download PDFInfo
- Publication number
- JP7344660B2 JP7344660B2 JP2019052735A JP2019052735A JP7344660B2 JP 7344660 B2 JP7344660 B2 JP 7344660B2 JP 2019052735 A JP2019052735 A JP 2019052735A JP 2019052735 A JP2019052735 A JP 2019052735A JP 7344660 B2 JP7344660 B2 JP 7344660B2
- Authority
- JP
- Japan
- Prior art keywords
- image set
- parallax
- disparity map
- original image
- magnification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Description
5f ≧ m ≧ 3f
を満たすことを特徴とする。
本実施形態では、パターン投影を使用したステレオ測距の高速化あるいは負荷低減を目的として、階層処理を適用した手法を提案する。階層処理では、撮像画像を例えば一定の画素間隔で間引いて作成した縮小画像を用いて視差量の計算を行うことにより、演算負荷を低減し、処理を高速化する。さらに、画素数の多い元画像での視差量の計算において、低階層で求めた視差量をもとに探索範囲を限定することにより、演算負荷を低減し、処理を高速化する。
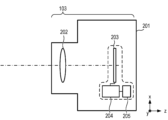
図1は、距離の測定対象にパターン光を投影して撮像することによって、原画像組を取得するパターン撮像部100を備えた視差算出装置の一例としての距離測定装置を示す。取得手段の一例としてのパターン撮像部100は、パターン光を投影する投影装置101(投影部)と、視差を持った原画像組を撮像する撮像装置103(撮像部)とを備える。投影装置101は、測定対象である被写体102へパターン光を投影する。そして、撮像装置103は、原画像組を撮像する。また、投影装置101及び撮像装置103は、同期等の制御を行うと共に、原画像組を縮小して得られた画像組から視差量を算出する計算機104(算出部)に接続されている。本実施形態では、投影装置101及び撮像装置103を備えるパターン撮像部100と計算機104とが別装置として設けられているが、一体となっていてもよい。また、投影装置101及び計算機104が一体であってもよく、撮像装置103が別装置であってもよく、装置構成は上述した構成に限らない。撮像装置103と計算機104が一体となっている場合、図2に示す、撮像装置103の演算処理部204が計算機104の構成・機能を兼ねていてもよい。
原画像組を取得し距離マップを算出する基本処理フローと、縮小した画像組を用いた階層処理について説明する。本実施形態では、所定のデータ数を有する視差マップを得るために、原画像組から縮小処理によって最も倍率を小さく縮小した画像組を用いる処理を最下層とする。この最下層の縮小画像を生成するときの倍率は、測距精度の低下を抑制することのできる倍率とするのが好ましい。なお、最下層の縮小画像の倍率については、詳細に後述する。そして、段階的に画像組の倍率が大きくなっていく(あまり縮小されなくなっていく)複数の階層において、順次視差マップを算出する。このとき各階層での探索範囲あるいは探索ウィンドウは1階層下の演算結果に基づいて限定的な探索範囲あるいは探索ウィンドウのサイズで決定することで、視差マップ算出にかかる処理負荷および処理速度を大幅に低減する。
従って、ステップS601にて取得した原画像組の画素からa画素おきに出力することによって、倍率mの縮小画像を得ることができる。
続いて、第1実施形態に係る視差マップの算出において、ステップS602で行われる原画像組を最も小さく縮小する最下層の階層処理における、原画像組を縮小する倍率mと、パターン光を投影して撮像して得られた原画像中の空間周波数fとの関係を説明する。
原画像組を取得する撮像装置103は、2つ以上の複数の光学系とそれに対応する撮像素子を有するステレオカメラであってもよい。ステレオカメラを用いることにより、基線長の設計自由度が向上し、測距分解能が向上する。また、第1実施形態に係るパターン撮像部100は、撮像装置103に投影装置101を搭載したひとつの装置であってもよい。この装置は、撮像装置103と投影装置101の位置関係が固定された状態となるため、耐環境性の向上、及び画角又は倍率の条件設定の容易化を実現できる。具体的には図10に示すように、第1実施形態に係る撮像装置は、カメラボディ201の上部に投影装置1001を搭載し、制御装置1010を用いて、互いのパラメータ及び同期を制御する、撮像装置1000としてもよい。
(高速測定モード、FA検査装置)
図11から図13を参照して、第2実施形態に係る撮像装置1100を用いたFA(Factory Automation)検査装置及び速度設定モードに関して説明する。
(高精度モード)
続いて、第3実施形態に係る撮像装置が搭載する高精度モードを説明する。縮小画像を生成する倍率を設定するうえで、最も面内分解能が高い縮小画像が作成されるのは、間引きする画素数a=2のときである。このとき、倍率M=1/aは、最大の0.5となる。第3実施形態に係る撮像装置は、倍率Mを最も大きい値とする高精度モードを搭載している。この2画素おきでサンプリングした場合の倍率Mは、撮像素子によって、すなわち撮像素子の画素間隔によって決まるナイキスト周波数f_nyqに一致する。
このように基準周波数fを設定することにより、最も高精度な縮小画像でも(サンプリング画素を2画素おきに設定した場合でも)、原画像組の互いの信号形状が劣化することを抑制できる。これにより、高精度で視差マップを算出でき、ひいては高精度で測距できる。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
102 測定対象
1040 縮小手段
1042 算出手段
Claims (16)
- パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、
前記原画像組を縮小する縮小手段と、
前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備え、
所定のデータ数を有する視差マップを得るために、前記算出手段は、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出し、各階層の視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際に前記最下層の視差マップを得るための倍率である倍率mと、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fとの関係が、以下の条件
5f ≧ m ≧ 3f
を満たすことを特徴とする、視差算出装置。 - 前記条件を満たすように、前記倍率mを設定することを特徴とする、請求項1に記載の視差算出装置。
- 前記条件を満たすように、前記パターン光の投影パターンまたは前記取得手段による撮像条件が設定されることを特徴とする、請求項1または2に記載の視差算出装置。
- 前記基準周波数fは、前記原画像組における空間周波数の分布における最多の成分であることを特徴とする、請求項1または2に記載の視差算出装置。
- 前記基準周波数fは、前記原画像組における合焦面での空間周波数であることを特徴とする、請求項1または2に記載の視差算出装置。
- 前記基準周波数fは、前記原画像組における最も高い空間周波数であることを特徴とする、請求項1または2に記載の視差算出装置。
- 前記測定対象に対応する撮像画像における注目領域を設定することにより、前記算出手段により所定の速度で視差マップを算出する、速度設定モードを搭載したことを特徴とする、請求項1乃至6のいずれか1項に記載の視差算出装置。
- 前記縮小手段が前記原画像組を縮小する際の倍率を最も大きい値とする高精度モードを搭載し、当該高精度モードにおいて、撮像素子によって決まるナイキスト周波数f_nyqに対し、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fが、以下の条件
(1/3)*f_nyq ≧ f ≧ (1/5)*f_nyq
を満たすように、前記取得手段及び前記算出手段の少なくとも一方の条件を設定することを特徴とする、請求項1乃至7のいずれか1項に記載の視差算出装置。 - パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、
前記原画像組を縮小する縮小手段と、
前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備え、
所定のデータ数を有する視差マップを得るために、前記算出手段は、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出し、各階層の視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際の倍率を最も大きい値とする高精度モードを搭載し、当該高精度モードにおいて、撮像素子によって決まるナイキスト周波数f_nyqに対し、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fが、以下の条件
(1/3)*f_nyq ≧ f ≧ (1/5)*f_nyq
を満たすように、前記取得手段及び前記算出手段の少なくとも一方の条件を設定することを特徴とする視差算出装置。 - パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、前記原画像組を縮小する縮小手段と、前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備える視差算出装置を用いた視差算出方法であって、
所定のデータ数を有する視差マップを得るために、前記算出手段は、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出するステップを有し、
各階層ので視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際に前記最下層の視差マップを得るための倍率である倍率mと、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fとの関係が、以下の条件
5f ≧ m ≧ 3f
を満たすことを特徴とする、視差算出方法。 - 前記測定対象に対応する撮像画像における注目領域を設定することにより、予め決められた速度で視差マップを算出する、速度設定モードを搭載したことを特徴とする、請求項10に記載の視差算出方法。
- パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、前記原画像組を縮小する縮小手段と、前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備える視差算出装置を用いた視差算出方法であって、
所定のデータ数を有する視差マップを得るために、前記算出手段は、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出するステップを有し、
各階層ので視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際の倍率を最も大きい値とする高精度モードを搭載し、当該高精度モードにおいて、撮像素子によって決まるナイキスト周波数f_nyqに対し、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fが、以下の条件
(1/3)*f_nyq ≧ f ≧ (1/5)*f_nyq
を満たすように、前記取得手段及び前記算出手段の少なくとも一方の条件を設定することを特徴とする、視差算出方法。 - パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、前記原画像組を縮小する縮小手段と、前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備える視差算出装置の制御プログラムであって、
所定のデータ数を有する視差マップを得るために、前記算出手段に、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出するステップを実行させ、
各階層で視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際に前記最下層の視差マップを得るための倍率である倍率mと、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fとの関係が、以下の条件
5f ≧ m ≧ 3f
を満たすことを特徴とする、視差算出装置の制御プログラム。 - 前記測定対象に対応する撮像画像における注目領域を設定することにより、前記算出手段により予め決められた速度で視差マップを算出する、速度設定モードを搭載したことを特徴とする請求項13に記載の視差算出装置の制御プログラム。
- パターン光が投影された測定対象を撮像して得られた、視差を有する原画像組を取得する取得手段と、前記原画像組を縮小する縮小手段と、前記縮小手段から得られる画像組から、各領域で所定の探索範囲及び探索ウィンドウを用いて前記画像組の各領域に対応する視差量の分布である視差マップを算出する算出手段と、を備える視差算出装置の制御プログラムであって、
所定のデータ数を有する視差マップを得るために、前記算出手段に、前記縮小手段から得られる最も倍率の小さい画像組を用いて算出される視差マップの階層を最下層として、複数の階層においてそれぞれ視差マップを算出するステップを実行させ、
各階層で視差マップを算出する際の前記所定の探索範囲は、1階層下の視差マップに基づいて決定され、
前記縮小手段が前記原画像組を縮小する際の倍率を最も大きい値とする高精度モードを搭載し、当該高精度モードにおいて、撮像素子によって決まるナイキスト周波数f_nyqに対し、前記測定対象に投影された前記パターン光の前記原画像組上での基準周波数fが、以下の条件
(1/3)*f_nyq ≧ f ≧ (1/5)*f_nyq
を満たすように、前記取得手段及び前記算出手段の少なくとも一方の条件を設定することを特徴とする視差算出装置の制御プログラム。 - 請求項13乃至15のいずれか1項に記載の制御プログラムを記憶したことを特徴とするコンピュータが読み取り可能な記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/364,752 US11037316B2 (en) | 2018-03-30 | 2019-03-26 | Parallax calculation apparatus, parallax calculation method, and control program of parallax calculation apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018067512 | 2018-03-30 | ||
| JP2018067512 | 2018-03-30 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019184587A JP2019184587A (ja) | 2019-10-24 |
| JP2019184587A5 JP2019184587A5 (ja) | 2022-03-31 |
| JP7344660B2 true JP7344660B2 (ja) | 2023-09-14 |
Family
ID=68340085
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019052735A Active JP7344660B2 (ja) | 2018-03-30 | 2019-03-20 | 視差算出装置、視差算出方法及び視差算出装置の制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7344660B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112991254A (zh) | 2019-12-13 | 2021-06-18 | 上海肇观电子科技有限公司 | 视差估计系统、方法、电子设备及计算机可读存储介质 |
| JP7449096B2 (ja) | 2020-01-10 | 2024-03-13 | 株式会社野村総合研究所 | 注文管理装置 |
| JP7452121B2 (ja) | 2020-03-12 | 2024-03-19 | オムロン株式会社 | 検査装置及び検査方法 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003187261A (ja) | 2001-12-14 | 2003-07-04 | Canon Inc | 3次元画像生成装置、3次元画像生成方法、立体画像処理装置、立体画像撮影表示システム、立体画像処理方法及び記憶媒体 |
| JP2004184240A (ja) | 2002-12-03 | 2004-07-02 | Topcon Corp | 画像測定装置、画像測定方法、画像処理装置 |
| US20040222987A1 (en) | 2003-05-08 | 2004-11-11 | Chang Nelson Liang An | Multiframe image processing |
| JP2005292017A (ja) | 2004-04-02 | 2005-10-20 | Dainippon Screen Mfg Co Ltd | 位置ずれ量取得装置および欠陥検出装置 |
| JP2007213353A (ja) | 2006-02-09 | 2007-08-23 | Honda Motor Co Ltd | 三次元物体を検出する装置 |
| JP2008082707A (ja) | 2006-09-25 | 2008-04-10 | Topcon Corp | 測量方法及び測量システム及び測量データ処理プログラム |
| WO2012137511A1 (ja) | 2011-04-07 | 2012-10-11 | パナソニック株式会社 | 画像処理装置および画像処理方法 |
| JP2015137933A (ja) | 2014-01-22 | 2015-07-30 | 富士通株式会社 | 距離測定装置、距離測定方法および距離測定プログラム |
| JP2015173430A (ja) | 2014-02-18 | 2015-10-01 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 投影システム、半導体集積回路、および画像補正方法 |
| JP2016024052A (ja) | 2014-07-18 | 2016-02-08 | 国立大学法人 鹿児島大学 | 3次元計測システム、3次元計測方法及びプログラム |
| JP2016514867A (ja) | 2013-03-18 | 2016-05-23 | フォトネーション リミテッド | 動き推定の方法及び装置 |
| JP2016095808A (ja) | 2014-11-17 | 2016-05-26 | キヤノン株式会社 | 物体検出装置、物体検出方法、画像認識装置及びコンピュータプログラム |
| JP2017027101A (ja) | 2015-07-15 | 2017-02-02 | 凸版印刷株式会社 | デプスマップ生成装置、デプスマップ生成方法及びプログラム |
-
2019
- 2019-03-20 JP JP2019052735A patent/JP7344660B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003187261A (ja) | 2001-12-14 | 2003-07-04 | Canon Inc | 3次元画像生成装置、3次元画像生成方法、立体画像処理装置、立体画像撮影表示システム、立体画像処理方法及び記憶媒体 |
| JP2004184240A (ja) | 2002-12-03 | 2004-07-02 | Topcon Corp | 画像測定装置、画像測定方法、画像処理装置 |
| US20040222987A1 (en) | 2003-05-08 | 2004-11-11 | Chang Nelson Liang An | Multiframe image processing |
| JP2005292017A (ja) | 2004-04-02 | 2005-10-20 | Dainippon Screen Mfg Co Ltd | 位置ずれ量取得装置および欠陥検出装置 |
| JP2007213353A (ja) | 2006-02-09 | 2007-08-23 | Honda Motor Co Ltd | 三次元物体を検出する装置 |
| JP2008082707A (ja) | 2006-09-25 | 2008-04-10 | Topcon Corp | 測量方法及び測量システム及び測量データ処理プログラム |
| WO2012137511A1 (ja) | 2011-04-07 | 2012-10-11 | パナソニック株式会社 | 画像処理装置および画像処理方法 |
| JP2016514867A (ja) | 2013-03-18 | 2016-05-23 | フォトネーション リミテッド | 動き推定の方法及び装置 |
| JP2015137933A (ja) | 2014-01-22 | 2015-07-30 | 富士通株式会社 | 距離測定装置、距離測定方法および距離測定プログラム |
| JP2015173430A (ja) | 2014-02-18 | 2015-10-01 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 投影システム、半導体集積回路、および画像補正方法 |
| JP2016024052A (ja) | 2014-07-18 | 2016-02-08 | 国立大学法人 鹿児島大学 | 3次元計測システム、3次元計測方法及びプログラム |
| JP2016095808A (ja) | 2014-11-17 | 2016-05-26 | キヤノン株式会社 | 物体検出装置、物体検出方法、画像認識装置及びコンピュータプログラム |
| JP2017027101A (ja) | 2015-07-15 | 2017-02-02 | 凸版印刷株式会社 | デプスマップ生成装置、デプスマップ生成方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019184587A (ja) | 2019-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8199335B2 (en) | Three-dimensional shape measuring apparatus, three-dimensional shape measuring method, three-dimensional shape measuring program, and recording medium | |
| JP7344660B2 (ja) | 視差算出装置、視差算出方法及び視差算出装置の制御プログラム | |
| CN107113370B (zh) | 图像记录设备及记录图像方法 | |
| TWI509220B (zh) | 採用表面顏色之表面形貌干涉儀 | |
| TWI434022B (zh) | 彩色共焦顯微系統及其訊號處理方法 | |
| KR20160045670A (ko) | 비행-시간 카메라 시스템 | |
| CN110567970B (zh) | 一种边缘缺陷检测装置及方法 | |
| TWI567364B (zh) | 結構光產生裝置、量測系統及其方法 | |
| TW201531730A (zh) | 資訊處理裝置及資訊處理方法 | |
| US10713810B2 (en) | Information processing apparatus, method of controlling information processing apparatus, and storage medium | |
| US9131219B2 (en) | Method and apparatus for triangulation-based 3D optical profilometry | |
| KR101824328B1 (ko) | 색수차를 이용한 3차원 스캐너 및 스캐닝 방법 | |
| JP2019203796A (ja) | 光学検査装置及び光学検査方法 | |
| JP2009025189A (ja) | 計測器 | |
| JP2017134561A (ja) | 画像処理装置、撮像装置および画像処理プログラム | |
| US11295484B2 (en) | Method for carrying out a shading correction and optical observation device system | |
| US11037316B2 (en) | Parallax calculation apparatus, parallax calculation method, and control program of parallax calculation apparatus | |
| US20190301855A1 (en) | Parallax detection device, distance detection device, robot device, parallax detection method, and distance detection method | |
| US20170270688A1 (en) | Positional shift amount calculation apparatus and imaging apparatus | |
| TW201638552A (zh) | 測量薄膜厚度的方法 | |
| WO2022096925A1 (en) | Three-dimensional scanner having sensors with overlapping fields of view | |
| US20200320725A1 (en) | Light projection systems | |
| JP2021004762A (ja) | 計測装置、撮像装置、計測システム、制御方法、プログラム及び記録媒体 | |
| JP2007071817A (ja) | 二光束干渉計及び同干渉計を用いた被測定物の形状測定方法 | |
| KR20190003363A (ko) | 라인 폭 측정 시스템 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220322 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220322 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230904 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7344660 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |