JP7310411B2 - ステアリング装置 - Google Patents
ステアリング装置 Download PDFInfo
- Publication number
- JP7310411B2 JP7310411B2 JP2019138975A JP2019138975A JP7310411B2 JP 7310411 B2 JP7310411 B2 JP 7310411B2 JP 2019138975 A JP2019138975 A JP 2019138975A JP 2019138975 A JP2019138975 A JP 2019138975A JP 7310411 B2 JP7310411 B2 JP 7310411B2
- Authority
- JP
- Japan
- Prior art keywords
- operation member
- driver
- storage area
- operating member
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/16—Steering columns
- B62D1/18—Steering columns yieldable or adjustable, e.g. tiltable
- B62D1/183—Steering columns yieldable or adjustable, e.g. tiltable adjustable between in-use and out-of-use positions, e.g. to improve access
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/16—Steering columns
- B62D1/18—Steering columns yieldable or adjustable, e.g. tiltable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/16—Steering columns
- B62D1/18—Steering columns yieldable or adjustable, e.g. tiltable
- B62D1/19—Steering columns yieldable or adjustable, e.g. tiltable incorporating energy-absorbing arrangements, e.g. by being yieldable or collapsible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B62D1/10—Hubs; Connecting hubs to steering columns, e.g. adjustable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/16—Steering columns
- B62D1/18—Steering columns yieldable or adjustable, e.g. tiltable
- B62D1/181—Steering columns yieldable or adjustable, e.g. tiltable with power actuated adjustment, e.g. with position memory
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Controls (AREA)
- Air Bags (AREA)
Description
[1.ステアリング装置の構成]
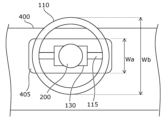
図1は、実施の形態に係るステアリング装置100の外観を示す斜視図である。図2は、実施の形態に係るステアリング装置100の機能構成を示すブロック図である。
まず、図3~図5を用いて、操作部材110の退避動作の一例を説明する。図3は、実施の形態に係る操作部材110の退避動作の一例を示す図である。図4は、実施の形態に係る操作部材110とダッシュボード400に設けられた開口部405との大小関係を示す図である。図5は、実施の形態に係るステアリング装置100における操作部材110の退避動作の概要を示すフロー図である。
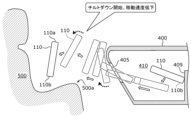
図6は、実施の形態の変形例1に係る操作部材110の退避動作の一部を示す図である。具体的には、図6では、変形例1における初期動作の概要が示されている。図6に示すように、変形例1に係る制御部190は、操作部材110の格納領域410への退避の開始時に、スライド機構部170及びチルト機構部180を制御することで、操作部材110の上方への移動の後に、操作部材110の前方への移動を開始する。このように、最初に操作部材110を上方に逃がした後に操作部材110を前方へ移動することでも、膝領域500aを回避しながら操作部材110を前方に移動させることがきる。
図7は、実施の形態の変形例2に係る操作部材110の退避動作の一部を示す図である。具体的には、図7では、変形例2における初期動作の概要が示されている。図7に示すように、変形例2に係る制御部190は、操作部材110の格納領域410への退避の開始時に、スライド機構部170及び回転機構部130を制御することで、操作部材110の前方への移動と、操作部材110の回転とを同時に行う初期動作を実行する。
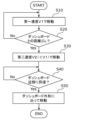
次に図8及び図9を用いて、操作部材110の進出動作の一例を説明する。図8は、実施の形態に係る操作部材110の進出動作の一例を示す図である。図9は、実施の形態に係る操作部材110の進出動作における速度制御の一例を示すフロー図である。
以上、本発明に係るステアリング装置について、実施の形態及びその変形例に基づいて説明した。しかしながら、本発明は、上記実施の形態及び変形例に限定されるものではない。本発明の趣旨を逸脱しない限り、当業者が思いつく各種変形を上記実施の形態または変形例に施したものも、あるいは、上記説明された複数の構成要素を組み合わせて構築される形態も、本発明の範囲内に含まれる。
Claims (7)
- 車両の操舵を行うためのステアリング装置であって、
操作を行うための操作部材と、
前記操作部材を、運転者による操作のための位置である通常位置と、前記通常位置よりも前方の格納領域との間で移動させる第一移動機構部と、
前記操作部材の、前記車両の上下方向の位置を変更させるように前記操作部材を移動させる第二移動機構部と、
前記第一移動機構部及び前記第二移動機構部を制御する制御部とを備え、
前記格納領域は、前記車両の運転席の前方に配置された車両部材の開口部の内方に位置し、
前記制御部は、前記操作部材の前記格納領域への退避を行う場合、前記第一移動機構部及び前記第二移動機構部を制御することで前記第一移動機構部及び前記第二移動機構部を同時に動作させ、これにより、前記車両部材の近傍に到達した前記操作部材を、前記車両部材の外形に沿うように移動させる前方動作を実行し、
前記制御部は、前記操作部材の前記格納領域への退避を行う場合、前記操作部材が前記格納領域内の所定の位置に到達したとき、前記第二移動機構部を制御することで、前記操作部材を、前記格納領域内において上方に移動させる、
ステアリング装置。 - さらに、前記車両の幅方向に延びる回転軸を中心に、前記操作部材を回転させる回転機構部を備え、
前記制御部はさらに、前記回転機構部を制御することで、前記前方動作において、前記操作部材の上端部が、前記車両部材の外形に沿うように移動させる、
請求項1記載のステアリング装置。 - 前記操作部材を前記開口部に沿わせ、かつ、前記開口部の開口方向から見た場合の、前記操作部材の縦幅は、前記開口部の縦幅よりも大きく、
前記制御部は、前記操作部材を前記開口部に挿入する場合、前記第一移動機構部、前記第二移動機構部、及び前記回転機構部を制御することで、前記操作部材の下端部が前方に向くように回転された前記操作部材を、前記下端部から前記開口部に挿入する、
請求項2記載のステアリング装置。 - 前記制御部は、前記操作部材の前記格納領域への退避を行う場合、前記操作部材の少な
くとも一部が前記格納領域内に到達した後であって、前記第二移動機構部による前記操作部材の下方への移動の完了後に、前記第一移動機構部による前記操作部材の前方への移動速度を上昇させる、
請求項1~3のいずれか一項に記載のステアリング装置。 - 前記制御部は、前記操作部材の前記格納領域への退避を行う場合、前記操作部材の一部が、前記格納領域を形成する面、または、前記格納領域内に固定された部材に接触した状態で、前記退避を完了させる、
請求項1~4のいずれか一項に記載のステアリング装置。 - 前記制御部は、前記格納領域に退避された前記操作部材の前記通常位置への進出を行う場合、前記通常位置に向けた移動を開始した後の前記操作部材が所定の位置に到達したとき、前記第一移動機構部を制御することで移動速度を落とし、かつ、前記第二移動機構部を制御することで、前記操作部材を上方に移動させる、
請求項1~5のいずれか一項に記載のステアリング装置。 - 前記制御部は、前記格納領域に退避された前記操作部材の前記通常位置への進出を行う場合において、前記運転者の指示により前記進出を行う場合、前記運転者の指示によらずに前記進出を行う場合よりも大きい移動速度で前記操作部材を移動させる、
請求項1~6のいずれか一項に記載のステアリング装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019138975A JP7310411B2 (ja) | 2019-07-29 | 2019-07-29 | ステアリング装置 |
| US16/929,385 US11198464B2 (en) | 2019-07-29 | 2020-07-15 | Steering system |
| CN202010679925.9A CN112298328A (zh) | 2019-07-29 | 2020-07-15 | 转向系统 |
| EP20187405.4A EP3771619B1 (en) | 2019-07-29 | 2020-07-23 | Steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019138975A JP7310411B2 (ja) | 2019-07-29 | 2019-07-29 | ステアリング装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021020581A JP2021020581A (ja) | 2021-02-18 |
| JP2021020581A5 JP2021020581A5 (ja) | 2022-06-13 |
| JP7310411B2 true JP7310411B2 (ja) | 2023-07-19 |
Family
ID=71783903
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019138975A Active JP7310411B2 (ja) | 2019-07-29 | 2019-07-29 | ステアリング装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11198464B2 (ja) |
| EP (1) | EP3771619B1 (ja) |
| JP (1) | JP7310411B2 (ja) |
| CN (1) | CN112298328A (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102111357B1 (ko) * | 2018-09-21 | 2020-05-15 | 주식회사 만도 | 차량의 조향 컬럼 |
| US11472465B2 (en) * | 2019-04-25 | 2022-10-18 | Jtekt Corporation | Steering device |
| US11292502B2 (en) * | 2020-02-10 | 2022-04-05 | Caterpillar Inc. | Steering assembly |
| DE102021203496B4 (de) * | 2020-04-09 | 2023-12-21 | Hl Mando Corporation | Klappbare lenkradanordnung und lenkvorrichtung, die diese umfasst |
| CN113562061A (zh) * | 2020-04-29 | 2021-10-29 | 株式会社万都 | 具备折叠式方向盘结构的转向柱 |
| WO2023031889A2 (en) * | 2021-09-06 | 2023-03-09 | Zf Automotive Technologies (shanghai) Co., Ltd. | Vehicle interior system, control method for vehicle interior system, and related device |
| DE102021210120A1 (de) | 2021-09-14 | 2023-03-16 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verstellbare Lenksäule für ein Steer-by-Wire-Lenksystem eines Kraftfahrzeugs |
| US11667321B2 (en) * | 2021-09-30 | 2023-06-06 | Ford Global Technologies, Llc | Interior system of a vehicle |
| DE102022108042A1 (de) | 2022-04-04 | 2023-10-05 | Bayerische Motoren Werke Aktiengesellschaft | Beduftungssystem zur Beduftung eines Innenraums eines Fahrzeugs |
| EP4032783B1 (de) * | 2022-05-11 | 2024-05-01 | thyssenkrupp Presta AG | Lenksäule für ein kraftfahrzeug |
| US11745786B1 (en) * | 2022-07-21 | 2023-09-05 | GM Global Technology Operations LLC | Steering control system having a telescoping steering wheel rim |
| CN116142278A (zh) * | 2022-10-27 | 2023-05-23 | 浙江极氪智能科技有限公司 | 管柱组件及汽车 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019077354A (ja) | 2017-10-25 | 2019-05-23 | 本田技研工業株式会社 | 車両操作システム、車両操作方法、およびプログラム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5419215A (en) * | 1989-09-05 | 1995-05-30 | Ultra-Precision Manufacturing Ltd. | Automatic steering wheel pivoting mechanism |
| IT1286722B1 (it) * | 1996-04-16 | 1998-07-17 | Fiat Auto Spa | Volante reclinabile, particolarmente per autoveicoli. |
| FR2806042B1 (fr) * | 2000-03-13 | 2002-07-12 | Renault | Planche de bord a tablette pour vehicule automobile |
| FR2861657B1 (fr) | 2003-11-04 | 2007-01-19 | Peugeot Citroen Automobiles Sa | Poste de conduite d'un vehicule automobile |
| US8862331B2 (en) * | 2011-10-26 | 2014-10-14 | Jtekt Corporation | Controller for steering apparatus |
| US20140260761A1 (en) * | 2013-03-15 | 2014-09-18 | Ford Global Technologies, Llc | Method and system for stowing steering column in a vehicle |
| EP3042825B1 (en) * | 2015-01-12 | 2022-03-09 | Volvo Car Corporation | A steering wheel assembly for retracting a steering wheel in a vehicle |
| US10343706B2 (en) | 2015-06-11 | 2019-07-09 | Steering Solutions Ip Holding Corporation | Retractable steering column system, vehicle having the same, and method |
| CN107416008A (zh) * | 2016-04-13 | 2017-12-01 | 法拉第未来公司 | 使车辆方向盘自动缩回和伸出的系统和方法 |
| DE102016225297A1 (de) * | 2016-12-16 | 2018-06-21 | Thyssenkrupp Ag | Lenkrad für eine Kraftfahrzeuglenkung und Lenksäule für ein Kraftfahrzeug |
| FR3064239B1 (fr) | 2017-03-21 | 2021-05-14 | Faurecia Interieur Ind | Panneau de garnissage d'un vehicule comportant un ensemble de direction |
| JP7091789B2 (ja) * | 2018-04-04 | 2022-06-28 | 株式会社ジェイテクト | ステアリング装置 |
| JP7192362B2 (ja) * | 2018-09-28 | 2022-12-20 | 株式会社ジェイテクト | ステアリング装置 |
| US11472465B2 (en) * | 2019-04-25 | 2022-10-18 | Jtekt Corporation | Steering device |
| JP7400244B2 (ja) * | 2019-07-29 | 2023-12-19 | 株式会社ジェイテクト | ステアリング装置 |
-
2019
- 2019-07-29 JP JP2019138975A patent/JP7310411B2/ja active Active
-
2020
- 2020-07-15 US US16/929,385 patent/US11198464B2/en active Active
- 2020-07-15 CN CN202010679925.9A patent/CN112298328A/zh active Pending
- 2020-07-23 EP EP20187405.4A patent/EP3771619B1/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019077354A (ja) | 2017-10-25 | 2019-05-23 | 本田技研工業株式会社 | 車両操作システム、車両操作方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3771619A1 (en) | 2021-02-03 |
| EP3771619B1 (en) | 2022-05-04 |
| US20210031823A1 (en) | 2021-02-04 |
| CN112298328A (zh) | 2021-02-02 |
| US11198464B2 (en) | 2021-12-14 |
| JP2021020581A (ja) | 2021-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7310411B2 (ja) | ステアリング装置 | |
| JP7400244B2 (ja) | ステアリング装置 | |
| US11560169B2 (en) | Retractable steering column system and method | |
| US10343706B2 (en) | Retractable steering column system, vehicle having the same, and method | |
| US11472465B2 (en) | Steering device | |
| CN111645751B (zh) | 车辆操舵装置 | |
| JP7363498B2 (ja) | ステアリング装置 | |
| JP7375565B2 (ja) | ステアリング装置 | |
| JP2008273521A (ja) | 移動体の自動運転装置 | |
| CN110065464A (zh) | 车辆座椅和车辆 | |
| JP7268524B2 (ja) | ステアリング装置 | |
| US9216776B2 (en) | Foldable vehicle and method of controlling the same | |
| JP5262589B2 (ja) | 車両用操舵装置 | |
| JP7119535B2 (ja) | ステアリング装置 | |
| JP5110352B2 (ja) | 電動式ステアリングコラム装置 | |
| JP2007062471A (ja) | 車両用操舵装置 | |
| CN111098765B (zh) | 车辆用乘坐者保护装置 | |
| JP4538902B2 (ja) | 車両用ステアリング機構の制御装置 | |
| JP7363646B2 (ja) | ステアリング装置 | |
| JPH03193555A (ja) | 自動車のステアリング構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220603 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230619 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7310411 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |