JP7233302B2 - 測定装置および測定方法 - Google Patents
測定装置および測定方法 Download PDFInfo
- Publication number
- JP7233302B2 JP7233302B2 JP2019100619A JP2019100619A JP7233302B2 JP 7233302 B2 JP7233302 B2 JP 7233302B2 JP 2019100619 A JP2019100619 A JP 2019100619A JP 2019100619 A JP2019100619 A JP 2019100619A JP 7233302 B2 JP7233302 B2 JP 7233302B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- unit
- distance
- signal
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 5
- 238000005259 measurement Methods 0.000 claims description 102
- 238000006243 chemical reaction Methods 0.000 claims description 58
- 238000004364 calculation method Methods 0.000 claims description 41
- 238000001514 detection method Methods 0.000 claims description 15
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 3
- 238000005070 sampling Methods 0.000 claims description 3
- 230000001678 irradiating effect Effects 0.000 claims 2
- 230000003287 optical effect Effects 0.000 description 57
- 238000004458 analytical method Methods 0.000 description 17
- 238000012935 Averaging Methods 0.000 description 9
- 238000001228 spectrum Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 7
- 238000003860 storage Methods 0.000 description 7
- 239000013307 optical fiber Substances 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 230000010355 oscillation Effects 0.000 description 4
- 230000003321 amplification Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 229910052691 Erbium Inorganic materials 0.000 description 1
- 229910052779 Neodymium Inorganic materials 0.000 description 1
- 229910052771 Terbium Inorganic materials 0.000 description 1
- 229910052775 Thulium Inorganic materials 0.000 description 1
- 229910052769 Ytterbium Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- UYAHIZSMUZPPFV-UHFFFAOYSA-N erbium Chemical compound [Er] UYAHIZSMUZPPFV-UHFFFAOYSA-N 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- QEFYFXOXNSNQGX-UHFFFAOYSA-N neodymium atom Chemical compound [Nd] QEFYFXOXNSNQGX-UHFFFAOYSA-N 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- GZCRRIHWUXGPOV-UHFFFAOYSA-N terbium atom Chemical compound [Tb] GZCRRIHWUXGPOV-UHFFFAOYSA-N 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- NAWDYIZEMPQZHO-UHFFFAOYSA-N ytterbium Chemical compound [Yb] NAWDYIZEMPQZHO-UHFFFAOYSA-N 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
- G01S7/4812—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver transmitted and received beams following a coaxial path
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02001—Interferometers characterised by controlling or generating intrinsic radiation properties
- G01B9/02002—Interferometers characterised by controlling or generating intrinsic radiation properties using two or more frequencies
- G01B9/02003—Interferometers characterised by controlling or generating intrinsic radiation properties using two or more frequencies using beat frequencies
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/34—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4911—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4915—Time delay measurement, e.g. operational details for pixel components; Phase measurement
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Instruments For Measurement Of Length By Optical Means (AREA)
Description
図1は、本実施形態に係る測定装置100の構成例を計測対象物10と共に示す図である。測定装置100は、当該測定装置100および計測対象物10の間の距離を光学的に測定する。また、測定装置100は、計測対象物10に照射するレーザ光の位置を走査して、計測対象物10の三次元的な形状を計測してもよい。測定装置100は、レーザ装置110と、分岐部120と、光サーキュレータ130と、光ヘッド部140と、ビート信号発生部150と、変換部160と、算出部170と、表示部180とを備える。
図2は、本実施形態に係るレーザ装置110の構成例を示す。図2のレーザ装置110は、周波数シフト帰還レーザの一例を示す。レーザ装置110は、レーザ共振器を有し、当該レーザ共振器内でレーザ光を発振させる。レーザ装置110のレーザ共振器は、周波数シフタ112と、増幅媒体114と、WDMカプラ116と、ポンプ光源117、出力カプラ118とを含むレーザ共振器を有する。


本実施形態に係る測定装置100は、(数2)式で示すような周波数成分を出力するレーザ装置110を用いて、光ヘッド部140および計測対象物10の間の距離dを測定する。ここで、参照光および反射光の間の光路差が、距離dを往復した距離2dだけであり、距離2dに対応する伝搬遅延をΔtとする。即ち、時刻tにおいて、測定光が計測対象物10から反射して戻ってきた場合、戻ってきた反射光は、時刻tよりも時間Δtだけ過去の周波数と略一致するので、次式で示すことができる。




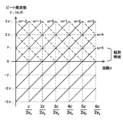
そこで、本実施形態に係る測定装置100は、ビート信号の観測帯域を拡大して、異なる複数の帯域に発生する複数のビート信号を測定する。図4に示すように、ビート信号発生部150は、反射光および参照光を混合して異なる複数のモード番号mの複数のビート信号νB(m,d)を発生させる。したがって、変換部160のビート信号νB(m,d)の観測帯域を拡大すると、異なる周波数に発生する複数のビート信号νB(m,d)を観測できる。
図8は、本実施形態に係る測定装置100に設けられている変換部160および算出部170の構成例を示す。図8に示す変換部160は、図5で説明した変換部160と同様の構成なので、動作が略同一のものには同一の符号を付け、説明を省略する。図8に示す変換部160および算出部170は、測定装置100が2×νC以上の観測帯域を有するように構成されている。
図9は、本実施形態に係る測定装置100に設けられている変換部160および算出部170の変形例を示す。図9に示す変換部160および算出部170は、図7で説明した変換部160および算出部170と同様の構成なので、動作が略同一のものには同一の符号を付け、説明を省略する。変形例の算出部170は、分割部172と、積算部178と、検出部174と、距離算出部176とを有する。
100 測定装置
110 レーザ装置
112 周波数シフタ
114 増幅媒体
116 WDMカプラ
117 ポンプ光源
118 出力カプラ
120 分岐部
130 光サーキュレータ
140 光ヘッド部
150 ビート信号発生部
152 光90度ハイブリッド
154 第1光電変換部
156 第2光電変換部
160 変換部
162 第1フィルタ部
164 第2フィルタ部
170 算出部
172 分割部
174 検出部
176 距離算出部
178 積算部
180 表示部
202 第1AD変換器
204 第2AD変換器
210 クロック信号供給部
220 周波数解析部
310 周波数変換部
Claims (7)
- 計測対象物までの距離を測定する測定装置であって、
レーザ共振器を有し、複数のモードの周波数変調レーザ光を出力するレーザ装置と、
前記レーザ装置が出力する前記周波数変調レーザ光の一部を参照光とし、残りの少なくとも一部を測定光として分岐する分岐部と、
前記測定光を計測対象物に照射して反射された反射光と、前記参照光とを混合して複数のビート信号を発生させるビート信号発生部と、
前記複数のビート信号を前記レーザ共振器の共振器周波数の4倍以上の周波数でサンプリングしてデジタル信号に変換する変換部と、
前記デジタル信号に基づき、前記測定装置から前記計測対象物までの距離を算出する算出部と
を備える、測定装置。 - 前記変換部は、前記デジタル信号を周波数情報に変換する周波数変換部を有し、
前記算出部は、
前記周波数変換部が変換した周波数情報の周波数帯域を、予め定められた帯域幅の複数の帯域の周波数情報に分割する分割部と、
分割された複数の周波数情報毎にビート信号の周波数位置を検出する検出部と、
検出した複数のビート信号の周波数位置に基づき、前記測定装置から前記計測対象物までの距離を算出する距離算出部と
を有する、請求項1に記載の測定装置。 - 前記距離算出部は、前記複数のビート信号の周波数位置に対応する前記測定装置から前記計測対象物までの距離をそれぞれ算出し、算出した複数の距離を平均化する、請求項2に記載の測定装置。
- 前記距離算出部は、前記複数のビート信号の対応する周波数位置を換算し、換算した周波数位置を平均化し、平均化した周波数位置に対応する前記測定装置から前記計測対象物までの距離を算出する、請求項2に記載の測定装置。
- 前記変換部は、前記デジタル信号を周波数情報に変換する周波数変換部を有し、
前記算出部は、
前記周波数変換部が変換した周波数情報の周波数帯域を、予め定められた帯域幅の複数の帯域の周波数情報に分割する分割部と、
分割された複数の周波数情報を対応する1つの周波数帯域の周波数情報に変換してから、周波数毎に信号レベルを積算する積算部と、
積算された周波数情報におけるビート信号の周波数位置を検出する検出部と、
検出した前記ビート信号の周波数位置に基づき、前記測定装置から前記計測対象物までの距離を算出する距離算出部と
を有する、請求項1に記載の測定装置。 - 前記分割部は、前記予め定められた帯域幅を前記共振器周波数以下の帯域幅とする、請求項2から5のいずれか一項に記載の測定装置。
- 計測対象物までの距離を測定する測定装置の測定方法であって、
レーザ共振器を有するレーザ装置から複数のモードの周波数変調レーザ光を出力するステップと、
前記周波数変調レーザ光の一部を参照光とし、残りの少なくとも一部を測定光として分岐するステップと、
前記測定光を計測対象物に照射して反射された反射光と、前記参照光とを混合して複数のビート信号を発生させるステップと、
前記複数のビート信号を前記レーザ共振器の共振器周波数の4倍以上の周波数でサンプリングしてデジタル信号に変換するステップと、
前記デジタル信号に基づき、前記測定装置から前記計測対象物までの距離を算出するステップと
を備える、測定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019100619A JP7233302B2 (ja) | 2019-05-29 | 2019-05-29 | 測定装置および測定方法 |
| DE102020206612.4A DE102020206612A1 (de) | 2019-05-29 | 2020-05-27 | Messvorrichtung und messverfahren |
| CN202010465964.9A CN112014852B (zh) | 2019-05-29 | 2020-05-28 | 测量装置和测量方法 |
| US16/887,941 US11635518B2 (en) | 2019-05-29 | 2020-05-29 | Measurement apparatus and measurement method using a laser and beat signals |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019100619A JP7233302B2 (ja) | 2019-05-29 | 2019-05-29 | 測定装置および測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020193910A JP2020193910A (ja) | 2020-12-03 |
| JP7233302B2 true JP7233302B2 (ja) | 2023-03-06 |
Family
ID=73264441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019100619A Active JP7233302B2 (ja) | 2019-05-29 | 2019-05-29 | 測定装置および測定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11635518B2 (ja) |
| JP (1) | JP7233302B2 (ja) |
| CN (1) | CN112014852B (ja) |
| DE (1) | DE102020206612A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7247058B2 (ja) * | 2019-08-26 | 2023-03-28 | 株式会社ミツトヨ | 測定装置および測定方法 |
| JP7572875B2 (ja) * | 2021-02-24 | 2024-10-24 | 株式会社ミツトヨ | 測定装置及び測定方法 |
| JP7654453B2 (ja) * | 2021-04-20 | 2025-04-01 | 株式会社ミツトヨ | 測定装置および測定方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001041706A (ja) | 1999-07-27 | 2001-02-16 | Mitsubishi Heavy Ind Ltd | 光周波数領域反射測定装置および光周波数領域反射測定方法 |
| JP2008232833A (ja) | 2007-03-20 | 2008-10-02 | Denso Corp | ノイズフロア強度算出方法,fmcwレーダ |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH580011A5 (ja) | 1974-06-28 | 1976-09-30 | Hermes Suesstoff Ag | |
| US5710621A (en) * | 1995-04-25 | 1998-01-20 | Omron Corporation | Heterodyne measurement device and method |
| JP3583906B2 (ja) * | 1996-07-15 | 2004-11-04 | 伊藤 弘昌 | 光学式距離計 |
| JP4617434B2 (ja) * | 2004-12-28 | 2011-01-26 | 独立行政法人産業技術総合研究所 | 距離測定装置 |
| CN100394211C (zh) * | 2006-04-07 | 2008-06-11 | 哈尔滨工业大学 | 多频同步调制激光测距方法与装置 |
| WO2008072481A1 (ja) * | 2006-12-11 | 2008-06-19 | Murata Manufacturing Co., Ltd. | レーダ装置 |
| JP2010203877A (ja) * | 2009-03-03 | 2010-09-16 | Topcon Corp | 距離測定装置 |
| JP2014202716A (ja) * | 2013-04-09 | 2014-10-27 | 株式会社日立ハイテクノロジーズ | 距離測定装置 |
| JP2016017918A (ja) * | 2014-07-10 | 2016-02-01 | 富士通株式会社 | 距離測定装置、距離測定方法およびプログラム |
| WO2018230474A1 (ja) * | 2017-06-16 | 2018-12-20 | 国立研究開発法人産業技術総合研究所 | 光学的距離測定装置及び測定方法 |
| JP7074311B2 (ja) * | 2017-08-30 | 2022-05-24 | 国立研究開発法人産業技術総合研究所 | 光学的距離測定装置および測定方法 |
| CN108931784A (zh) * | 2018-06-22 | 2018-12-04 | 杭州电子科技大学 | 基于激光频率扫描干涉测距的三维测量系统 |
| DE102019211832A1 (de) * | 2018-08-23 | 2020-02-27 | Mitutoyo Corporation | Messvorrichtung und messverfahren |
| CN109521436A (zh) * | 2018-10-16 | 2019-03-26 | 天津大学 | 一种基于双光路调频连续波的运动物体动态距离测量方法 |
| CN109557547B (zh) * | 2018-12-27 | 2020-10-23 | 武汉万集信息技术有限公司 | 激光雷达、距离测量和/或速度确定方法及存储介质 |
-
2019
- 2019-05-29 JP JP2019100619A patent/JP7233302B2/ja active Active
-
2020
- 2020-05-27 DE DE102020206612.4A patent/DE102020206612A1/de active Pending
- 2020-05-28 CN CN202010465964.9A patent/CN112014852B/zh active Active
- 2020-05-29 US US16/887,941 patent/US11635518B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001041706A (ja) | 1999-07-27 | 2001-02-16 | Mitsubishi Heavy Ind Ltd | 光周波数領域反射測定装置および光周波数領域反射測定方法 |
| JP2008232833A (ja) | 2007-03-20 | 2008-10-02 | Denso Corp | ノイズフロア強度算出方法,fmcwレーダ |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112014852B (zh) | 2025-06-27 |
| CN112014852A (zh) | 2020-12-01 |
| US11635518B2 (en) | 2023-04-25 |
| DE102020206612A1 (de) | 2020-12-03 |
| JP2020193910A (ja) | 2020-12-03 |
| US20200379112A1 (en) | 2020-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7284652B2 (ja) | 測定装置および測定方法 | |
| JP7329376B2 (ja) | 測定装置および測定方法 | |
| CN111512182B (zh) | 激光雷达装置 | |
| JP7233302B2 (ja) | 測定装置および測定方法 | |
| JP7247058B2 (ja) | 測定装置および測定方法 | |
| JP2017053645A (ja) | 光ファイバ特性測定装置 | |
| JP7289222B2 (ja) | 測定装置および測定方法 | |
| CN110857988B (zh) | 测量装置和测量方法 | |
| JP7526614B2 (ja) | 測定装置および測定方法 | |
| JP2016148539A (ja) | Oct装置 | |
| JP7558712B2 (ja) | 測定装置および測定方法 | |
| JP2022128698A (ja) | 測定装置及び測定方法 | |
| JP6039744B1 (ja) | 雑音指数測定方法、雑音指数測定装置、および測定システム | |
| JP2022165436A (ja) | 測定装置および測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220414 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7233302 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |