JP7217230B2 - 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 - Google Patents
内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 Download PDFInfo
- Publication number
- JP7217230B2 JP7217230B2 JP2019526210A JP2019526210A JP7217230B2 JP 7217230 B2 JP7217230 B2 JP 7217230B2 JP 2019526210 A JP2019526210 A JP 2019526210A JP 2019526210 A JP2019526210 A JP 2019526210A JP 7217230 B2 JP7217230 B2 JP 7217230B2
- Authority
- JP
- Japan
- Prior art keywords
- ablation
- energy
- catheter
- vein
- nerve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002679 ablation Methods 0.000 title claims description 1008
- 210000005036 nerve Anatomy 0.000 title claims description 304
- 238000000034 method Methods 0.000 title description 326
- 206010019280 Heart failures Diseases 0.000 title description 80
- 230000009278 visceral effect Effects 0.000 title description 35
- 238000011282 treatment Methods 0.000 title description 22
- 230000009467 reduction Effects 0.000 claims description 55
- 210000004204 blood vessel Anatomy 0.000 claims description 36
- 230000003247 decreasing effect Effects 0.000 claims description 10
- 210000003462 vein Anatomy 0.000 description 400
- 230000003601 intercostal effect Effects 0.000 description 267
- 230000000638 stimulation Effects 0.000 description 243
- 210000004072 lung Anatomy 0.000 description 208
- 210000001519 tissue Anatomy 0.000 description 181
- 210000002466 splanchnic nerve Anatomy 0.000 description 136
- 210000001229 azygos vein Anatomy 0.000 description 93
- 210000000115 thoracic cavity Anatomy 0.000 description 87
- 210000004369 blood Anatomy 0.000 description 83
- 239000008280 blood Substances 0.000 description 83
- 230000004044 response Effects 0.000 description 80
- 230000017531 blood circulation Effects 0.000 description 70
- 230000000004 hemodynamic effect Effects 0.000 description 67
- 230000002792 vascular Effects 0.000 description 67
- 239000012530 fluid Substances 0.000 description 57
- 230000002889 sympathetic effect Effects 0.000 description 55
- 230000006461 physiological response Effects 0.000 description 51
- 238000012544 monitoring process Methods 0.000 description 44
- 238000004422 calculation algorithm Methods 0.000 description 41
- 238000001514 detection method Methods 0.000 description 40
- 230000003902 lesion Effects 0.000 description 38
- 230000035945 sensitivity Effects 0.000 description 38
- 238000010586 diagram Methods 0.000 description 37
- 210000002216 heart Anatomy 0.000 description 37
- 230000000694 effects Effects 0.000 description 34
- 210000005166 vasculature Anatomy 0.000 description 34
- 238000009423 ventilation Methods 0.000 description 33
- 210000004224 pleura Anatomy 0.000 description 30
- 230000008859 change Effects 0.000 description 28
- 230000001276 controlling effect Effects 0.000 description 27
- 210000000188 diaphragm Anatomy 0.000 description 27
- 230000006378 damage Effects 0.000 description 26
- 230000000241 respiratory effect Effects 0.000 description 26
- 238000003384 imaging method Methods 0.000 description 25
- 238000002847 impedance measurement Methods 0.000 description 24
- 230000001537 neural effect Effects 0.000 description 24
- 230000000747 cardiac effect Effects 0.000 description 23
- 230000000875 corresponding effect Effects 0.000 description 23
- 238000013507 mapping Methods 0.000 description 23
- 238000005259 measurement Methods 0.000 description 23
- 238000002604 ultrasonography Methods 0.000 description 22
- 230000004872 arterial blood pressure Effects 0.000 description 21
- 238000010438 heat treatment Methods 0.000 description 21
- 238000002560 therapeutic procedure Methods 0.000 description 21
- 230000006870 function Effects 0.000 description 20
- 239000000835 fiber Substances 0.000 description 19
- 230000007246 mechanism Effects 0.000 description 19
- 208000002193 Pain Diseases 0.000 description 18
- 238000012790 confirmation Methods 0.000 description 18
- 208000038003 heart failure with preserved ejection fraction Diseases 0.000 description 18
- 230000036407 pain Effects 0.000 description 18
- 210000002820 sympathetic nervous system Anatomy 0.000 description 17
- 230000004936 stimulating effect Effects 0.000 description 16
- 230000002685 pulmonary effect Effects 0.000 description 15
- 230000002829 reductive effect Effects 0.000 description 15
- 239000005526 vasoconstrictor agent Substances 0.000 description 15
- 230000036772 blood pressure Effects 0.000 description 14
- 210000002569 neuron Anatomy 0.000 description 14
- 230000002861 ventricular Effects 0.000 description 14
- 238000010317 ablation therapy Methods 0.000 description 13
- 238000013459 approach Methods 0.000 description 13
- 238000004891 communication Methods 0.000 description 13
- 230000007383 nerve stimulation Effects 0.000 description 13
- 210000000331 sympathetic ganglia Anatomy 0.000 description 13
- 238000012360 testing method Methods 0.000 description 13
- 206010007556 Cardiac failure acute Diseases 0.000 description 12
- 208000000059 Dyspnea Diseases 0.000 description 12
- 206010013975 Dyspnoeas Diseases 0.000 description 12
- 206010058990 Venous occlusion Diseases 0.000 description 12
- 230000007423 decrease Effects 0.000 description 12
- 230000005684 electric field Effects 0.000 description 12
- 230000036316 preload Effects 0.000 description 12
- 241001465754 Metazoa Species 0.000 description 11
- 230000004913 activation Effects 0.000 description 11
- 230000001684 chronic effect Effects 0.000 description 11
- 230000004087 circulation Effects 0.000 description 11
- 238000009826 distribution Methods 0.000 description 11
- 208000014674 injury Diseases 0.000 description 11
- 238000012285 ultrasound imaging Methods 0.000 description 11
- 206010020772 Hypertension Diseases 0.000 description 10
- 230000003187 abdominal effect Effects 0.000 description 10
- 239000003814 drug Substances 0.000 description 10
- 230000010412 perfusion Effects 0.000 description 10
- 210000001147 pulmonary artery Anatomy 0.000 description 10
- 230000001225 therapeutic effect Effects 0.000 description 10
- 206010007559 Cardiac failure congestive Diseases 0.000 description 9
- 206010020565 Hyperaemia Diseases 0.000 description 9
- 230000001154 acute effect Effects 0.000 description 9
- 238000004458 analytical method Methods 0.000 description 9
- 230000000903 blocking effect Effects 0.000 description 9
- 229940079593 drug Drugs 0.000 description 9
- 238000002474 experimental method Methods 0.000 description 9
- 238000001990 intravenous administration Methods 0.000 description 9
- 238000012806 monitoring device Methods 0.000 description 9
- 210000000056 organ Anatomy 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 239000000126 substance Substances 0.000 description 9
- 230000009724 venous congestion Effects 0.000 description 9
- 208000027418 Wounds and injury Diseases 0.000 description 8
- 239000002872 contrast media Substances 0.000 description 8
- 238000001816 cooling Methods 0.000 description 8
- 239000002934 diuretic Substances 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 8
- 238000011144 upstream manufacturing Methods 0.000 description 8
- 206010052337 Diastolic dysfunction Diseases 0.000 description 7
- 230000004217 heart function Effects 0.000 description 7
- 230000002427 irreversible effect Effects 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 7
- 230000036961 partial effect Effects 0.000 description 7
- 238000007674 radiofrequency ablation Methods 0.000 description 7
- 230000029058 respiratory gaseous exchange Effects 0.000 description 7
- 239000000523 sample Substances 0.000 description 7
- 208000024891 symptom Diseases 0.000 description 7
- 230000015572 biosynthetic process Effects 0.000 description 6
- 230000035487 diastolic blood pressure Effects 0.000 description 6
- 230000001882 diuretic effect Effects 0.000 description 6
- 238000012377 drug delivery Methods 0.000 description 6
- 208000038002 heart failure with reduced ejection fraction Diseases 0.000 description 6
- 230000006872 improvement Effects 0.000 description 6
- 230000003434 inspiratory effect Effects 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 210000004165 myocardium Anatomy 0.000 description 6
- 230000002746 orthostatic effect Effects 0.000 description 6
- 201000003144 pneumothorax Diseases 0.000 description 6
- 230000024977 response to activity Effects 0.000 description 6
- 210000000278 spinal cord Anatomy 0.000 description 6
- 230000007704 transition Effects 0.000 description 6
- SFLSHLFXELFNJZ-QMMMGPOBSA-N (-)-norepinephrine Chemical compound NC[C@H](O)C1=CC=C(O)C(O)=C1 SFLSHLFXELFNJZ-QMMMGPOBSA-N 0.000 description 5
- 108091006146 Channels Proteins 0.000 description 5
- 208000006550 Mydriasis Diseases 0.000 description 5
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 5
- 210000003484 anatomy Anatomy 0.000 description 5
- 230000001746 atrial effect Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 5
- 230000002146 bilateral effect Effects 0.000 description 5
- 230000007012 clinical effect Effects 0.000 description 5
- 208000027744 congestion Diseases 0.000 description 5
- 230000036541 health Effects 0.000 description 5
- 208000019622 heart disease Diseases 0.000 description 5
- 210000004185 liver Anatomy 0.000 description 5
- 239000003550 marker Substances 0.000 description 5
- 239000003176 neuroleptic agent Substances 0.000 description 5
- 229960002748 norepinephrine Drugs 0.000 description 5
- SFLSHLFXELFNJZ-UHFFFAOYSA-N norepinephrine Natural products NCC(O)C1=CC=C(O)C(O)=C1 SFLSHLFXELFNJZ-UHFFFAOYSA-N 0.000 description 5
- 230000000803 paradoxical effect Effects 0.000 description 5
- 230000007310 pathophysiology Effects 0.000 description 5
- 230000037361 pathway Effects 0.000 description 5
- 210000003281 pleural cavity Anatomy 0.000 description 5
- 210000001321 subclavian vein Anatomy 0.000 description 5
- 230000035900 sweating Effects 0.000 description 5
- 230000003685 thermal hair damage Effects 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- 206010037368 Pulmonary congestion Diseases 0.000 description 4
- 230000003213 activating effect Effects 0.000 description 4
- UCTWMZQNUQWSLP-UHFFFAOYSA-N adrenaline Chemical compound CNCC(O)C1=CC=C(O)C(O)=C1 UCTWMZQNUQWSLP-UHFFFAOYSA-N 0.000 description 4
- 210000003403 autonomic nervous system Anatomy 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 230000036760 body temperature Effects 0.000 description 4
- 210000000038 chest Anatomy 0.000 description 4
- 230000009091 contractile dysfunction Effects 0.000 description 4
- 230000002596 correlated effect Effects 0.000 description 4
- 210000003191 femoral vein Anatomy 0.000 description 4
- 230000001976 improved effect Effects 0.000 description 4
- 238000001802 infusion Methods 0.000 description 4
- 239000003978 infusion fluid Substances 0.000 description 4
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- 210000001370 mediastinum Anatomy 0.000 description 4
- 210000003205 muscle Anatomy 0.000 description 4
- 230000002182 neurohumoral effect Effects 0.000 description 4
- 230000004007 neuromodulation Effects 0.000 description 4
- 238000010587 phase diagram Methods 0.000 description 4
- 230000001766 physiological effect Effects 0.000 description 4
- 230000002035 prolonged effect Effects 0.000 description 4
- 208000013220 shortness of breath Diseases 0.000 description 4
- 239000011780 sodium chloride Substances 0.000 description 4
- 210000000952 spleen Anatomy 0.000 description 4
- 230000009885 systemic effect Effects 0.000 description 4
- 238000004448 titration Methods 0.000 description 4
- 210000001631 vena cava inferior Anatomy 0.000 description 4
- 210000002620 vena cava superior Anatomy 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 108060003345 Adrenergic Receptor Proteins 0.000 description 3
- 102000017910 Adrenergic receptor Human genes 0.000 description 3
- 208000031229 Cardiomyopathies Diseases 0.000 description 3
- 241000282412 Homo Species 0.000 description 3
- NNJVILVZKWQKPM-UHFFFAOYSA-N Lidocaine Chemical compound CCN(CC)CC(=O)NC1=C(C)C=CC=C1C NNJVILVZKWQKPM-UHFFFAOYSA-N 0.000 description 3
- 206010030113 Oedema Diseases 0.000 description 3
- 210000000709 aorta Anatomy 0.000 description 3
- 230000006793 arrhythmia Effects 0.000 description 3
- 206010003119 arrhythmia Diseases 0.000 description 3
- 210000004027 cell Anatomy 0.000 description 3
- 239000013043 chemical agent Substances 0.000 description 3
- 230000001447 compensatory effect Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- QTCANKDTWWSCMR-UHFFFAOYSA-N costic aldehyde Natural products C1CCC(=C)C2CC(C(=C)C=O)CCC21C QTCANKDTWWSCMR-UHFFFAOYSA-N 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000004064 dysfunction Effects 0.000 description 3
- 210000003414 extremity Anatomy 0.000 description 3
- ISTFUJWTQAMRGA-UHFFFAOYSA-N iso-beta-costal Natural products C1C(C(=C)C=O)CCC2(C)CCCC(C)=C21 ISTFUJWTQAMRGA-UHFFFAOYSA-N 0.000 description 3
- 229960004194 lidocaine Drugs 0.000 description 3
- 238000002595 magnetic resonance imaging Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000002107 myocardial effect Effects 0.000 description 3
- 230000007830 nerve conduction Effects 0.000 description 3
- 210000000944 nerve tissue Anatomy 0.000 description 3
- 230000002644 neurohormonal effect Effects 0.000 description 3
- 230000000701 neuroleptic effect Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 210000000496 pancreas Anatomy 0.000 description 3
- 230000036581 peripheral resistance Effects 0.000 description 3
- 230000004088 pulmonary circulation Effects 0.000 description 3
- 230000007115 recruitment Effects 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 150000003839 salts Chemical class 0.000 description 3
- 210000002460 smooth muscle Anatomy 0.000 description 3
- 210000002784 stomach Anatomy 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000025033 vasoconstriction Effects 0.000 description 3
- 210000001835 viscera Anatomy 0.000 description 3
- 206010006322 Breath holding Diseases 0.000 description 2
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 102000008186 Collagen Human genes 0.000 description 2
- 108010035532 Collagen Proteins 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 2
- 206010038748 Restrictive cardiomyopathy Diseases 0.000 description 2
- 239000000219 Sympatholytic Substances 0.000 description 2
- 108010057266 Type A Botulinum Toxins Proteins 0.000 description 2
- 206010047139 Vasoconstriction Diseases 0.000 description 2
- 210000004079 adrenergic fiber Anatomy 0.000 description 2
- 210000001367 artery Anatomy 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 210000004556 brain Anatomy 0.000 description 2
- 210000000170 cell membrane Anatomy 0.000 description 2
- 210000003169 central nervous system Anatomy 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 229920001436 collagen Polymers 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000009849 deactivation Effects 0.000 description 2
- 230000034994 death Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 229940030606 diuretics Drugs 0.000 description 2
- 231100000673 dose–response relationship Toxicity 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 210000003238 esophagus Anatomy 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 206010016256 fatigue Diseases 0.000 description 2
- 210000001105 femoral artery Anatomy 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000010304 firing Methods 0.000 description 2
- 238000002637 fluid replacement therapy Methods 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 210000002683 foot Anatomy 0.000 description 2
- 230000020169 heat generation Effects 0.000 description 2
- 206010020871 hypertrophic cardiomyopathy Diseases 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000003907 kidney function Effects 0.000 description 2
- 210000002429 large intestine Anatomy 0.000 description 2
- 210000005240 left ventricle Anatomy 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 230000014759 maintenance of location Effects 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000001404 mediated effect Effects 0.000 description 2
- 238000002483 medication Methods 0.000 description 2
- 210000004379 membrane Anatomy 0.000 description 2
- 239000012528 membrane Substances 0.000 description 2
- 230000002503 metabolic effect Effects 0.000 description 2
- 230000017074 necrotic cell death Effects 0.000 description 2
- 210000004126 nerve fiber Anatomy 0.000 description 2
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 210000000929 nociceptor Anatomy 0.000 description 2
- 108091008700 nociceptors Proteins 0.000 description 2
- 230000009279 non-visceral effect Effects 0.000 description 2
- 230000035479 physiological effects, processes and functions Effects 0.000 description 2
- 230000035790 physiological processes and functions Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 238000011176 pooling Methods 0.000 description 2
- 230000001144 postural effect Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000000306 recurrent effect Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000008085 renal dysfunction Effects 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 238000005549 size reduction Methods 0.000 description 2
- 210000000813 small intestine Anatomy 0.000 description 2
- 230000016160 smooth muscle contraction Effects 0.000 description 2
- 239000008223 sterile water Substances 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 230000008700 sympathetic activation Effects 0.000 description 2
- 210000000225 synapse Anatomy 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 210000002978 thoracic duct Anatomy 0.000 description 2
- 230000000451 tissue damage Effects 0.000 description 2
- 231100000827 tissue damage Toxicity 0.000 description 2
- 238000003325 tomography Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000003827 upregulation Effects 0.000 description 2
- UCTWMZQNUQWSLP-VIFPVBQESA-N (R)-adrenaline Chemical compound CNC[C@H](O)C1=CC=C(O)C(O)=C1 UCTWMZQNUQWSLP-VIFPVBQESA-N 0.000 description 1
- 229930182837 (R)-adrenaline Natural products 0.000 description 1
- 239000005541 ACE inhibitor Substances 0.000 description 1
- 208000004998 Abdominal Pain Diseases 0.000 description 1
- 208000012260 Accidental injury Diseases 0.000 description 1
- 206010002091 Anaesthesia Diseases 0.000 description 1
- 241000473391 Archosargus rhomboidalis Species 0.000 description 1
- 238000012935 Averaging Methods 0.000 description 1
- 102100032912 CD44 antigen Human genes 0.000 description 1
- 208000004990 Cardiorenal syndrome Diseases 0.000 description 1
- 208000017667 Chronic Disease Diseases 0.000 description 1
- 206010053567 Coagulopathies Diseases 0.000 description 1
- 206010061818 Disease progression Diseases 0.000 description 1
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 206010051283 Fluid imbalance Diseases 0.000 description 1
- 206010016803 Fluid overload Diseases 0.000 description 1
- 208000032843 Hemorrhage Diseases 0.000 description 1
- 208000029422 Hypernatremia Diseases 0.000 description 1
- 206010020751 Hypersensitivity Diseases 0.000 description 1
- 208000001953 Hypotension Diseases 0.000 description 1
- 206010061213 Iatrogenic injury Diseases 0.000 description 1
- 206010028311 Muscle hypertrophy Diseases 0.000 description 1
- 208000028389 Nerve injury Diseases 0.000 description 1
- 101710138657 Neurotoxin Proteins 0.000 description 1
- 102000019315 Nicotinic acetylcholine receptors Human genes 0.000 description 1
- 108050006807 Nicotinic acetylcholine receptors Proteins 0.000 description 1
- SNIOPGDIGTZGOP-UHFFFAOYSA-N Nitroglycerin Chemical compound [O-][N+](=O)OCC(O[N+]([O-])=O)CO[N+]([O-])=O SNIOPGDIGTZGOP-UHFFFAOYSA-N 0.000 description 1
- 239000000006 Nitroglycerin Substances 0.000 description 1
- 206010030124 Oedema peripheral Diseases 0.000 description 1
- 244000208734 Pisonia aculeata Species 0.000 description 1
- 208000002151 Pleural effusion Diseases 0.000 description 1
- 229920002614 Polyether block amide Polymers 0.000 description 1
- 206010037211 Psychomotor hyperactivity Diseases 0.000 description 1
- 206010056342 Pulmonary mass Diseases 0.000 description 1
- 206010037423 Pulmonary oedema Diseases 0.000 description 1
- 108091027981 Response element Proteins 0.000 description 1
- 206010039897 Sedation Diseases 0.000 description 1
- 206010071436 Systolic dysfunction Diseases 0.000 description 1
- 201000001943 Tricuspid Valve Insufficiency Diseases 0.000 description 1
- 206010044640 Tricuspid valve incompetence Diseases 0.000 description 1
- 206010046996 Varicose vein Diseases 0.000 description 1
- 206010066397 Visceral congestion Diseases 0.000 description 1
- 210000000683 abdominal cavity Anatomy 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- OIPILFWXSMYKGL-UHFFFAOYSA-N acetylcholine Chemical compound CC(=O)OCC[N+](C)(C)C OIPILFWXSMYKGL-UHFFFAOYSA-N 0.000 description 1
- 229960004373 acetylcholine Drugs 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000036982 action potential Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001919 adrenal effect Effects 0.000 description 1
- 210000001943 adrenal medulla Anatomy 0.000 description 1
- 230000001800 adrenalinergic effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 208000026935 allergic disease Diseases 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000037005 anaesthesia Effects 0.000 description 1
- 230000003444 anaesthetic effect Effects 0.000 description 1
- 229940044094 angiotensin-converting-enzyme inhibitor Drugs 0.000 description 1
- 210000003423 ankle Anatomy 0.000 description 1
- 210000002376 aorta thoracic Anatomy 0.000 description 1
- 208000006673 asthma Diseases 0.000 description 1
- 108091008698 baroreceptors Proteins 0.000 description 1
- 230000035581 baroreflex Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 208000034158 bleeding Diseases 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 210000000476 body water Anatomy 0.000 description 1
- 238000009835 boiling Methods 0.000 description 1
- 229940089093 botox Drugs 0.000 description 1
- 210000003129 brachiocephalic vein Anatomy 0.000 description 1
- -1 but not limited to Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 201000011510 cancer Diseases 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 230000005189 cardiac health Effects 0.000 description 1
- 230000002612 cardiopulmonary effect Effects 0.000 description 1
- 230000036996 cardiovascular health Effects 0.000 description 1
- 210000000748 cardiovascular system Anatomy 0.000 description 1
- 210000000845 cartilage Anatomy 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000035602 clotting Effects 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 210000002808 connective tissue Anatomy 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000018044 dehydration Effects 0.000 description 1
- 238000006297 dehydration reaction Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000003205 diastolic effect Effects 0.000 description 1
- 235000018823 dietary intake Nutrition 0.000 description 1
- 230000000916 dilatatory effect Effects 0.000 description 1
- 230000010339 dilation Effects 0.000 description 1
- 230000005750 disease progression Effects 0.000 description 1
- 230000008482 dysregulation Effects 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 238000004520 electroporation Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 229960005139 epinephrine Drugs 0.000 description 1
- 210000003722 extracellular fluid Anatomy 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 210000000609 ganglia Anatomy 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- 229960003711 glyceryl trinitrate Drugs 0.000 description 1
- 210000004013 groin Anatomy 0.000 description 1
- 230000036433 growing body Effects 0.000 description 1
- ACGDKVXYNVEAGU-UHFFFAOYSA-N guanethidine Chemical compound NC(N)=NCCN1CCCCCCC1 ACGDKVXYNVEAGU-UHFFFAOYSA-N 0.000 description 1
- 229960003602 guanethidine Drugs 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000037183 heart physiology Effects 0.000 description 1
- 230000002440 hepatic effect Effects 0.000 description 1
- 201000011200 hepatorenal syndrome Diseases 0.000 description 1
- 230000013632 homeostatic process Effects 0.000 description 1
- 230000003054 hormonal effect Effects 0.000 description 1
- 229940088597 hormone Drugs 0.000 description 1
- 239000005556 hormone Substances 0.000 description 1
- 230000009610 hypersensitivity Effects 0.000 description 1
- 230000036543 hypotension Effects 0.000 description 1
- 230000000642 iatrogenic effect Effects 0.000 description 1
- 238000001566 impedance spectroscopy Methods 0.000 description 1
- 238000001453 impedance spectrum Methods 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 230000008595 infiltration Effects 0.000 description 1
- 238000001764 infiltration Methods 0.000 description 1
- 230000002757 inflammatory effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 210000000876 intercostal muscle Anatomy 0.000 description 1
- 230000016507 interphase Effects 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 210000002977 intracellular fluid Anatomy 0.000 description 1
- 230000002262 irrigation Effects 0.000 description 1
- 238000003973 irrigation Methods 0.000 description 1
- 108010069264 keratinocyte CD44 Proteins 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 210000005246 left atrium Anatomy 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 210000003041 ligament Anatomy 0.000 description 1
- 238000002690 local anesthesia Methods 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000005923 long-lasting effect Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 231100000516 lung damage Toxicity 0.000 description 1
- 108700025647 major vault Proteins 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000003818 metabolic dysfunction Effects 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 230000005405 multipole Effects 0.000 description 1
- 230000012042 muscle hypertrophy Effects 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 208000031225 myocardial ischemia Diseases 0.000 description 1
- 230000008035 nerve activity Effects 0.000 description 1
- 230000008764 nerve damage Effects 0.000 description 1
- 210000000653 nervous system Anatomy 0.000 description 1
- 239000000712 neurohormone Substances 0.000 description 1
- 230000007658 neurological function Effects 0.000 description 1
- 239000002581 neurotoxin Substances 0.000 description 1
- 231100000618 neurotoxin Toxicity 0.000 description 1
- 239000002858 neurotransmitter agent Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000000474 nursing effect Effects 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000008058 pain sensation Effects 0.000 description 1
- 210000001002 parasympathetic nervous system Anatomy 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 210000003516 pericardium Anatomy 0.000 description 1
- 210000001428 peripheral nervous system Anatomy 0.000 description 1
- 238000001050 pharmacotherapy Methods 0.000 description 1
- 230000004962 physiological condition Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 208000007232 portal hypertension Diseases 0.000 description 1
- 230000008092 positive effect Effects 0.000 description 1
- 230000001242 postsynaptic effect Effects 0.000 description 1
- 210000001774 pressoreceptor Anatomy 0.000 description 1
- 230000003518 presynaptic effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000000069 prophylactic effect Effects 0.000 description 1
- 230000001107 psychogenic effect Effects 0.000 description 1
- 208000005333 pulmonary edema Diseases 0.000 description 1
- 210000004879 pulmonary tissue Anatomy 0.000 description 1
- 210000003492 pulmonary vein Anatomy 0.000 description 1
- 210000002321 radial artery Anatomy 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 230000003362 replicative effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000036387 respiratory rate Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 210000005241 right ventricle Anatomy 0.000 description 1
- 230000037390 scarring Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000036280 sedation Effects 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 210000002027 skeletal muscle Anatomy 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 210000003594 spinal ganglia Anatomy 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 210000001562 sternum Anatomy 0.000 description 1
- 239000000021 stimulant Substances 0.000 description 1
- 230000004206 stomach function Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000035488 systolic blood pressure Effects 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
- 210000000779 thoracic wall Anatomy 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 210000001170 unmyelinated nerve fiber Anatomy 0.000 description 1
- 210000001186 vagus nerve Anatomy 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
- 208000027185 varicose disease Diseases 0.000 description 1
- 230000004218 vascular function Effects 0.000 description 1
- 230000006442 vascular tone Effects 0.000 description 1
- 230000006498 vasomotor response Effects 0.000 description 1
- 230000008320 venous blood flow Effects 0.000 description 1
- 210000000264 venule Anatomy 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
- 239000011800 void material Substances 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images















































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/36014—External stimulators, e.g. with patch electrodes
- A61N1/36017—External stimulators, e.g. with patch electrodes with leads or electrodes penetrating the skin
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/0022—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00273—Anchoring means for temporary attachment of a device to tissue
- A61B2018/00279—Anchoring means for temporary attachment of a device to tissue deployable
- A61B2018/00285—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00434—Neural system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
- A61B2018/00648—Sensing and controlling the application of energy with feedback, i.e. closed loop control using more than one sensed parameter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1475—Electrodes retractable in or deployable from a housing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/024—Detecting, measuring or recording pulse rate or heart rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Cardiology (AREA)
- Heart & Thoracic Surgery (AREA)
- Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Otolaryngology (AREA)
- Plasma & Fusion (AREA)
- Neurosurgery (AREA)
- Pathology (AREA)
- Physiology (AREA)
- Neurology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Vascular Medicine (AREA)
- Surgical Instruments (AREA)
- Laser Surgery Devices (AREA)
- Electrotherapy Devices (AREA)
Description
本出願は、それぞれが参照により全体が本明細書に組み込まれる、2016年7月29日に出願された米国仮特許出願第62/368,912号、2016年10月21日に出願された米国仮特許出願第62/411,492号、及び2017年4月5日に出願された米国仮特許出願第62/482,142号に基づく優先権を主張する。
本明細書で言及された全ての刊行物及び特許出願は、恰も、個々の刊行物又は特許出願がそれぞれ特定的且つ個別に、参照により組み込まれると示されたかの如く参照により本明細書に援用される。
本発明は、内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法に関する。
1.神経アブレーション用のデバイス、特に、神経アブレーションによる心不全の治療用のデバイスであって、
a.少なくとも1つのアブレーション要素を有する血管内カテーテルと、
b.エネルギーをアブレーション要素に伝達できるエネルギー源と、
c.エネルギー源に作用し、エネルギー源を制御して、アブレーション要素を付勢することを含むコマンド手順を実行するように構成されたコントローラと、
を備えたデバイス。
i.近位領域と、
ii.可撓性シャフトと、
iii.遠位領域と、を備え、
可撓性シャフトは近位領域と遠位領域を接続し、患者の脈管系にアクセスするように構成され、
近位領域は、患者に対して外部である状態を保つように構成され、
遠位領域は、患者の脈管系を通って進められるように構成され、少なくとも1つのアブレーション要素を備えている、実施形態1に記載のデバイス。
a.アブレーション要素を付勢する、
b.刺激要素を付勢する、及び
c.検出要素を付勢する、
のうち少なくとも2つのステップを含むコマンド手順を実行させるように制御するように構成されている、先行実施形態3又は4又は5のいずれかに記載のデバイス。
a.アブレーション要素を付勢する、
b.刺激要素を付勢する、及び
c.検出要素を付勢する、
を含むコマンド手順を実行させるように制御するように構成されている、先行実施形態3又は4又は5又は6のいずれかに記載のデバイス。
a.全身静脈圧トランスデューサ、
b.肺静脈圧トランスデューサ、
c.肺動脈圧トランスデューサ、
d.少なくとも1つの心拍出量検出器、
e.少なくとも1つの血流モニタ、
f.又はそれらの組み合わせ
からなる群から選択される、先行実施形態3乃至14のいずれかに記載のデバイス。
a)少なくとも1つのアブレーション要素又は少なくとも1つの刺激要素を付勢して静脈の内壁を介して刺激を与えて隣接する神経を刺激するように、エネルギー源に命令し、
b)患者の血行動態又は生理的パラメータにおける変化を検出し、
c)少なくとも1つのアブレーション要素が、又は少なくとも1つの刺激要素が、正しい位置にあることを、検出された変化に基づいて決定する、
ことを含む、実施形態27又は28に記載のデバイス。
30.少なくとも1つのアブレーション要素が、又は少なくとも1つの刺激要素が、正しい位置にあることを、検出された変化に基づいて決定することは、以下の、
1.患者の血行動態又は生理的パラメータにおける検出された変化を、所定の許容値又は許容値の組と比較し、
2.患者の血行動態又は生理的パラメータにおける検出された変化が、許容値又は許容値の組に適合している場合に、少なくとも1つのアブレーション要素が、又は少なくとも1つの刺激要素が、正しい位置にあることを確定する、
サブステップを含む、実施形態29に記載のデバイス。
1.アブレーション電極それぞれから電気エネルギーを逐次印加し、
2.電気エネルギーを印加したときに、少なくとも1つの選択された血行動態パラメータ又は生理的パラメータに変化を引き起こすアブレーション電極のうち少なくとも1つを選択する、
ように命令することを含む、実施形態36又は37又は38に記載のデバイス。
1.刺激電極それぞれから電気エネルギーを逐次印加し、
2.電気エネルギーを印加したときに、少なくとも1つの選択された血行動態パラ
メータ又は生理的パラメータに変化を引き起こす刺激電極のうち少なくとも1つを選択する、
ように命令することを含む、実施形態36又は37又は38又は39に記載のデバイス。
1.刺激電極が電気エネルギーを静脈に印加しない間に選択された血行動態又は生理的パラメータのベースラインを記録し、
2.各刺激パルスに反応した選択された血行動態又は生理的パラメータの値を記録する、
ことを含む、実施形態36乃至40のうちいずれかに記載のデバイス。
1.アブレーション電極が電気エネルギーを静脈に印加しない間に選択された血行動態又は生理的パラメータのベースラインを記録し、
2.各刺激パルスに反応した選択された血行動態又は生理的パラメータの値を記録する、
ことを含む、実施形態36乃至41のうちいずれかに記載のデバイス。
1.選択された血行動態又は生理的パラメータの値が、ベースラインから閾値超大きいかどうか、任意選択的に、ベースラインから>20%であるかどうかを判断し、
2.選択された血行動態又は生理的パラメータをベースラインに、又はベースライン付近に戻させ、少なくとも3回の測定を反復し、少なくとも3回の刺激の平均測定を記録し、
3.標準誤差が+/-10%以内であれば、選択されたパラメータへの変更を確認する、
ことを含む、実施形態41又は42又は43又は44に記載のデバイス。
1.生成された画像を受信し、
2.生成された画像から、前記肋間静脈に相対した患者の肺の位置が所定距離内にあるかどうかを判断し、
3.患者の肺の位置が前記所定距離を超えている場合にのみ、エネルギー源が融除エネルギーを配給することを可能にする、
ように構成されている、先行実施形態49乃至59のいずれかに記載のデバイス。
1.生成されたソノグラムを受信し、
2.生成されたソノグラムから、肋間静脈に相対した患者の肺の位置が所定距離内にあるかどうかを判断し、
3.患者の肺の位置が前記所定距離を超えている場合にのみ、エネルギー源が融除エネルギーを配給することを可能にする、
ように構成される実施形態1乃至61のいずれかに記載のデバイス。
アブレーション要素に近接したアブレーションゾーンに存在する組織の物理的パラメータの少なくとも1つの測定値を受信又は決定する、
測定された物理的パラメータの前記値を少なくとも1つの基準値と比較する、
前記比較に基づいて、アブレーションゾーン内の肺組織の存在を検出する、
を含む肺の存在の検出手順を実行するように構成される実施形態1乃至64のいずれかに記載のデバイス。
-エネルギー源に、エネルギー源に接続されたカテーテル電極とエネルギー源に接続された分散電極との間、又はエネルギー源に接続された2つのカテーテル電極の間に電流を流させるように命令し、
-電気的パラメータセンサから物理的パラメータの少なくとも1つの測定値を受信する、
ように構成される実施形態65又は66又は67又は68に記載のデバイス。
‐エネルギー源に、前記音響エミッタからの発出音響信号を発出させるように命令し、
‐発出音響信号の結果として、音響受信機によって検出された音響信号に関する検出信号を、音響受信機から受信し、
‐前記発出信号と前記検出信号に基づいて物理的パラメータの値を決定する、
ように構成される実施形態72に記載のデバイス。
患者の換気に関連する信号を呼吸モニタから受信し、
呼吸モニタから来る前記信号から、以下の患者の換気パラメータのうち1つ以上を決定し、
・換気回数(時間単位ごとの呼吸)
・換気回数(時間単位ごとの総吸気量と総呼気量)
・各呼吸における排気開始時間
・各呼吸における吸気開始時間
・呼吸ごとの排気持続時間
・呼吸ごとの吸気持続時間
前記換気パラメータのうち1つ以上に基づいてアブレーションエネルギーを配給するように前記源を制御する、
ように構成されている実施形態97に記載のデバイス。
・換気回数(時間単位ごとの呼吸)
・換気回数(時間単位ごとの総吸気量と総呼気量)
・各呼吸における排気開始時間
・各呼吸における吸気開始時間
・呼吸ごとの排気持続時間
・呼吸ごとの吸気持続時間
のうち1つ以上を決定するように構成された自前のコンピューティングユニットを含み、
コントローラは前記換気パラメータのうち1つ以上を受信し、前記換気パラメータのうち1つ以上に基づいてアブレーションエネルギーを配給するように前記源を制御する、実施形態96又は97のいずれかに記載のデバイス。
近位領域、可撓性シャフト及び遠位領域を備えた血管内カテーテルを位置決めし、可撓性シャフトは近位領域と遠位領域を接続し、アクセス位置に相対した患者の腹部脈管系へのアクセスの為に十分な長さであり、近位領域は患者に対して外部である状態を保つように構成され、遠位領域は、患者の脈管系を通って進められるように構成され、血管の内壁と接触して腹部脈管系内で終端するような寸法であり、少なくとも1つのアブレーション要素、少なくとも1つの刺激要素及び少なくとも1つの検出要素を備え、
患者の脈管系を通って遠位領域を進め、
少なくとも1つのアブレーション要素を適用し、
患者から血管内カテーテルを除去する、ことを含む方法。
近位領域、可撓性シャフト及び遠位領域を備えた血管内カテーテルを位置決めし、可撓性シャフトは近位領域と遠位領域を接続し、アクセス位置に相対した患者の腹部脈管系へのアクセスの為に十分な長さであり、近位領域は患者に対して外部である状態を保つように構成され、遠位領域は、標的神経に隣接する患者の脈管系を通って進められるように構成され、血管の内壁と接触して腹部脈管系内で終端するような寸法であり、少なくとも1つのアブレーション要素、少なくとも1つの刺激要素及び少なくとも1つの検出要素を備え、
患者の脈管系を通って遠位領域を進め、静脈の内壁に、隣接する神経を刺激するのに十分な電気的刺激を印加し、少なくとも1つのアブレーション要素の位置決めが成功した適用を確認する為に生理変化を検出し、
隣接する神経を刺激する為に以前に十分であった電気的刺激を静脈の内壁に再印加して、標的神経の不可逆的アブレーションを確認し、
患者から血管内カテーテルを除去する、ことを含む方法。
図6A(矢状断面図)及び6B(2つ又は3つの脊椎レベル内の横隔膜より上のレベル、例えば、T10レベルでの横断図)は、幾つかの血管及び内臓神経の解剖学的関係の模式図である。奇静脈41は、胸脊柱(図7に、T1乃至T12と標示された胸椎骨55を含む)の側部を上り、上大静脈42及び下大静脈のほうに注ぐ。奇静脈系は、奇静脈41、半奇静脈43及び副半奇静脈44を含む(図7参照)。奇静脈の支流は後肋間静脈(本明細書では肋間静脈40とも呼ぶ)を含み、後肋間静脈は肋間腔に注ぐ。半奇静脈と副半奇静脈の支流は、左後肋間静脈(本明細書では肋間静脈40とも呼ぶ)を含む。これらの静脈、特に肋間静脈40は、内臓神経束の標的神経の少なくとも一部(例えば、大内臓神経45、小内臓神経46、最下内臓神経47、大内臓神経根48)を横断して非常に接近して通過する。GSN45は、腹腔神経節50につながるGSN根48として交感神経幹49から出現する節前線維から形成される為、交感神経幹49と腹腔神経節50の間でGSN45を形成するすべての節前線維を、簡略にする為、本明細書ではGSNと呼ぶ。同様に、交感神経幹49と腹腔神経節50の間の、大内臓神経、小内臓神経及び最下内臓神経を含む、胸内臓神経を形成するすべての節前線維を本明細書では胸内臓神経と呼ぶ。奇静脈41と肋椎関節54の間の肋間静脈40の図6Bに示した領域150は、GSN45及びGSN根48に近接している(例えば、一般的に、約1~5mmの距離194)。交感神経幹は肋椎関節54又は肋骨頚63付近である。図6Aには、大動脈51と横隔膜52も示されている。図6Bには、食道56、胸管57、迷走神経58、肋骨59、壁側胸膜60、胸膜61及び肺胸膜腔62及び肺65も示されている。
体内総水分の約5%は血液の形態で脈管系内にある。静脈系は総血液量の約70%を包含し、動脈系よりもおおよそ30倍コンプライアンスが高い。静脈コンプライアンスとは、内部圧力(例えば、dP/dV)の増加に応じて量を膨張増加させる中空臓器又は血管の能力の尺度である。量の調整には幾つかの機構が関与しており、最も重要なのは神経ホルモンである。動脈側では、流れ抵抗は抵抗血管によって調整される。交感神経系は、主に心肺及び動脈血圧反射機能の活性化及び不活性化によって、並びに循環ノルエピネフリンの変化によって全身血管抵抗(SVR)を決定するにあたり重要な役割を果たす。
血管を通って配給されるカテーテル又は他の長形医療デバイスを用いた血管内神経アブレーション、又は神経構造のアブレーション、特に、血管付近(例えば、多くの場合、内部血管壁から約5mm未満であるが、10~20mm程度離れている)の深内臓神経のアブレーションは、外科切除又は外科アブレーションよりも有利であり得る。例えば、血管内アブレーションは、侵襲性がより低く、手順においてより高速であり、患者の回復がより速い。本明細書では、用語「アブレーション」又は「融除する」(又はそれらの他の派生語)は、不可逆的組織壊死を引き起こすものとして定義される。動脈よりも静脈への介入がより安全と考えられる為、アブレーションエネルギーを配給する為に患者の静脈系を使用することが有益であり得る。静脈は、天然血液フィルタとして働く肺で終端する為、静脈内の血圧は、より低く、また、アブレーションからの出血及びデブリ又は凝固の危険を抑える。静脈は弾性がより高く、標的神経に相対した融除デバイスのより良い固定と並置を達成する為に閉塞及び伸張され得るということも有利である。特に、奇静脈又は半奇静脈の場合、更に肋間静脈の場合はより一層、静脈系では大いに冗長性があり、これらの静脈の閉塞は患者に対して危険でない。これは幾つかの動脈と対照的であり、動脈では閉塞が患者に危険とリスクを与える為、可能な限り回避又は極減される。
アブレーションのモダリティにかかわらず、デバイス、システム及び方法の実施形態は更に、アブレーションステップの前及び/又は後に安全性と効能の確認でアブレーション手順を支援するように構成されてよい。安全性の確認は、アブレーションエネルギー配給の範囲内の、非標的神経、器官若しくは解剖学的構造の検出又はそれらの不在の検出を含んでよい。技術的効能の確認は、アブレーションステップ前のアブレーションエネルギー配給の範囲内の標的神経の検出と、アブレーションステップ後の標的神経信号の不在の検出を含んでよい。手順効能の確認は、結果として得られる生理反応が、手順の望ましい臨床効果を表すものであるかを評価する為に、標的神経を一時的に遮断することを含み得る。




アブレーションに関する以下のいずれの方法、システム及びデバイスも、上記の刺激確認に関して述べたいずれの方法、システム及びデバイスにも組み込まれ得るる、又はそれらと併用され得る。
このセクションのいずれの方法、システム及びデバイスも、本明細書に記載のいずれの刺激確認及びアブレーション方法、デバイス及びシステムに組み込まれてよい。
血流と、血管(例えば、肋間静脈)の配置領域の収縮による電気的及び熱的変動性を低減する為の例示的方法は、標的神経を融除する為にアブレーションエネルギーを配給する前に静脈を意図的に閉じることである。冗長な静脈排出路経路により、患者を傷つけずに、幾つかの肋間静脈が閉塞又は閉鎖されてよく、閉塞又は閉鎖は恒久的であってもよい。血管の一部は、例えば、血管壁を加熱することによって、電気的信号若しくは、血管壁の平滑筋収縮を誘起する別の形態の刺激を印加することによって、又は血管内に真空を印加することによって、又は血管収縮剤を血管に配給することによって意図的に閉じられてよい。
限定はしないが、配置領域における血流を減少させる1つのモダリティは、静脈壁に十分な熱エネルギーを配給して、例えば静脈壁内のコラーゲン線維を変性させることによって、又は静脈壁の平滑筋収縮を刺激することによって静脈壁を閉鎖させることである。異なる目的に合わせて静脈を閉鎖する為に用いられ得るシステム及び方法は以前から開示されている。例えば、米国特許第3,301,258号は、静脈瘤を治療する為のシステムを記載している。開示されたシステムは、静脈内で展開されたプローブの2つの電極の間の静脈の区分に隣接した組織を介して電流を通し、電流は、静脈区分を閉鎖する為に静脈区分に十分な熱を生成する為のものである。しかしながら、このシステムは、神経の治療、組織の融除又は神経修飾療法を提供するように適合されたものとして意図されてはおらず、そのように記載されてはいない。実際、‘258号特許は、熱印加による付近の神経の機能の障害は一時的なものに過ぎないと教示しており、それは、本明細書に記載の使用方法及び療法とは特に反対であり、逆の教示をしている。従って、‘258号特許に記載される治療は、神経機能が治療後に回復することを可能にしている。
図40は、1つ以上の静脈閉鎖電極と1つ以上の別個のアブレーション要素を含むカテーテルの例示的実施形態を示す。カテーテル404は、軸方向に間隔を空けた1つ以上の静脈閉鎖電極405と、1つ以上の別個の経血管アブレーション電極406を備えている。静脈閉鎖電極は、図示の、また領域30に対して遠位の肋間静脈40のような標的血管内に位置決めされてよい。エネルギー(例えば、RF)は静脈閉鎖電極405から、例えば図42Aに示すようなエネルギー配給プロファイルを用いて、図示のように静脈閉鎖電極405の周りにぴったり沿って血管ルーメンを閉鎖又は縮小する為に、血管壁内で熱エネルギーを生成する為に配給されてよい。電極405は、アブレーションが実行されている間に閉鎖した静脈内の定位置に留まってよく、それが血管の閉塞を補助し得る。アブレーション電極406は、標的神経(複数可)の位置を範囲30内でマッピングする為の神経刺激電極としても機能してよい。静脈閉鎖電極(複数可)はシャフト407に接続されるか、又はシャフト407によって担持され、アブレーション電極(複数可)406はシャフト408に接続されるか、又はシャフト408によって担持され、その結果、静脈閉鎖電極(複数可)がその位置に留まりながら、アブレーション電極(複数可)406は範囲30内でスライドできる。例えば、図示のように、シャフト407は、アブレーション電極406とシャフト408のルーメン内を通ってよい。アブレーション電極406は、シャフト408をカテーテルの近位端から押すか引くことによって動かされてよい。例えば、シャフト408は、アブレーション電極406の長さにほぼ等しい増分でシャフト408を動かし従って電極406を動かし得るハンドル(図示せず)上のアクチュエータに接続されてよく、それは、神経刺激マッピング又は多数のアブレーションの形成のステップ中の範囲30のカバレージを促進し得る。アブレーション後に、カテーテルは血管から除去されて、部分的に閉じられた静脈から静脈閉鎖電極を除去し、それは、静脈が部分的に閉じられていたとしても静脈を通って血液が流れることを可能にさせ得る。任意選択的に、カテーテル404はガイドワイヤルーメン411を備えてよく、ガイドワイヤ410越しに配給される。X線不透過造影剤は、静脈40が十分に閉塞されたことを確認する為に例えばガイドワイヤルーメン411を通して閉塞された区分に対して遠位(上流)の肋間静脈に注入されてよい。任意選択的に、カテーテル404は図示のように配給シース409を介して配給されてもよい。任意選択的に、奇静脈41内の血流は本明細書に記載されるように閉塞されてもよく、又は、開口部64から逸らされてもよい。任意選択的に、カテーテル404は、図43Aに示すようにカテーテル440のサイドポート441から配給されて、開口部64に結合され得るカテーテル分岐点を形成してもよい。
図41A及び41Bに示された別の実施形態では、TSNアブレーション手順は、標的神経が交差する範囲30内にエネルギー配給要素417を位置決めし(図41A)、先ず静脈を閉鎖する為に範囲30内の静脈壁内で熱エネルギーを発生させる為に、エネルギー配給要素417を介してエネルギーを配給し、次に、エネルギー配給要素から、範囲30を取り囲む、又は範囲30に近接した組織にアブレーションエネルギーを配給して(図41B)、領域30の長さをカバーする為に多数の損傷418を形成して、標的神経45を融除することを含む。アブレーション範囲30内で静脈40を閉じることは、標的神経(複数可)45を融除する為に損傷の安全且つ有効な形成を促進する為に、電極(複数可)にわたる血流を減少又は除去できる。標的神経を融除する為のエネルギーを配給する前にアブレーション範囲内で静脈を閉鎖することは、エネルギー配給要素417と静脈壁の間の周方向並置も提供することとなり、それは、静脈周囲の首尾一貫した周方向アブレーションを促進し、それが効能を改善することにもなり得る。この方法向けに構成されたカテーテルは、ほぼ領域30の長さ(例えば、約3~4cm、約3cm、約1.5cm、約1~3cm)であるエネルギー配給要素を備えてよい。図示のように、エネルギー配給要素417は、シャフト419上に取り付けられシャフト419から軸方向に空間を空けて配置された多数のRF電極を備えている。多数の電極は単極モード又は双極モード向けに構成されてよい。図42A及び42Bに示されるように、単極モードでは、RFエネルギーは、静脈閉鎖の為のエネルギー配給プロファイルを用いて多数の電極から逐次配給されてよく、それに続いてアブレーションがある。RF電極は、アブレーション手順の技術的成功を評価する為の神経刺激電極としても機能してよい。エネルギー配給要素は、入り組んだ脈管系をうまく通る為に可撓性であってよい。代替的に、エネルギー配給要素は、金属コイル又はレーザーカット金属管などの単一の長形可撓性電極を備えてよい。代替的に、エネルギー配給要素は、直熱、マイクロ波又は光学的エネルギーなどの熱エネルギーを発生するその他のエネルギーモダリティを配給するように構成されてよい。
隣接する奇静脈を介した肋間静脈開口部(任意選択的に)への、及び標的肋間静脈への血流が減少又は除去された状態で、手順は、標的静脈構造を融除するステップに進んでよい。図42A及び42Bは、肋間静脈の一部分を閉鎖する為の、感知された温度及びインピーダンスに基づくエネルギー配給の出力の制御の実施形態(図42A)と、経血管標的神経アブレーションの実施形態(図42B)を示す。例えば、図38A乃至38Eとともに図42Aに示すように、RFエネルギー出力380は、定出力(例えば、10~20Wの範囲)の形式で、肋間静脈40がアブレーション電極362周囲で閉じた(383)又は収縮した兆候として、対応するインピーダンス381が上昇する(例えば、約150Ωから、約250~300Ωの範囲のより高いインピーダンスに)まで印加される。それに対応して、アブレーションカテーテル361に任意選択的な温度センサ375が装備されていた場合、感知された温度382は、肋間静脈40を通る血流367によって提供される対流冷却が低減又は除去されるにつれ増加する(例えば、体温から、約70~85℃の範囲のより高い温度に)。上記で論じ図38A、38B及び38Cで示したように、このステップは、標的肋間静脈の十分に長い区分(例えば、開口部64から、肋間静脈内への約3cmの範囲30、開口部64から、隣接する肋椎関節に整列した肋間静脈への位置までの範囲30)が閉鎖又は収縮するまで繰り返されてよい。次に、標的神経のアブレーションが、図38A乃至38Eとともに図42Bに示すように、温度制御式モダリティでエネルギーを印加することによって達成され得る。アブレーションコンソール363は、目標温度386に達するまで、増加したレベルの出力387を配給してもよい(例えば、約5~15Wの範囲の出力)。しかしながら、感知された温度388が目標温度386に達するか又は近づくにつれ、出力は、時間イベント390によって示されるようにより低いレベル(例えば、約2~10W)に降下することがある。アブレーションは、損傷が拡張して、標的神経45の位置まで達することを可能にする為に、より長期間にわたり続いてよい。図42C及び42Dは、アブレーション持続時間の増加につれて損傷深さが成長し続けることを実証する有限要素解析(FEA)結果を示す。図42Cは60秒でのFEMであり、それに対し、図42Dは同じエネルギー配給パラメータであるが、120秒まで継続されたFEMであり、肋間静脈壁397を超えて電極396から延長する55℃等温線395を示している。
幾つかの例において、標的肋間静脈を通る、又は奇静脈を通る血流の十分な減少は達成可能でない、又は望まれない。例えば、後事の反復したアブレーション手順を可能にする為に、標的肋間静脈のルーメン直径が部分的にのみ、又は可逆的に閉鎖又は縮小されることが望ましい可能性がある。別の場合には、静脈は十分に大きい為、その完全な閉鎖は所望の目標ではない場合がある。そのような場合、血流によってもたらされる冷却を克服する為に、より高い出力レベルが用いられてよい。しかしながら、アブレーション電極への炭化又は凝塊の蓄積を回避する為に、灌流が用いられてよい。灌流は、0.9%生理食塩水などの生理的適合及び無菌流体を、開ループ又は閉ループ手法のいずれかで注入することを含む。開ループ手法では、灌流液はエネルギー配給要素を冷却し、次に患者の血液循環に注入される。閉ループ手法では、灌流剤はエネルギー配給要素内部で循環する。開ループ手法では、患者に注入される灌流剤の体積流量に注意を払う必要があり得る。患者の状態によっては、自身の循環器系への大量の追加流体を蒙ることができない患者もいる可能性がある。その為、2~10ml/分などの低流量での開ループ灌流アブレーションシステムを作動させることが好ましい。
図43A乃至43Fに、TSNアブレーションカテーテルの別の実施形態が示されている。図43Bは、展開可能なバルーン448の表面上に取り付けられた多電極の形態のエネルギー配給要素(複数可)447を示す。バルーン448は肋間静脈40の標的領域30の内径にほぼ等しい直径を有してよく(例えば、2mm、2.5mm、3mm、3.5mm)、バルーンは、膨張されると、静脈を充満又は若干膨張させ、それで、血液がエネルギー配給要素(複数可)447にわたって流れることを防止し、エネルギー配給要素(複数可)を血管壁に確りと並置させて、血管の虚脱を防止し、エネルギー配給要素を標的神経に少し近づけて位置決めできる。これらの特徴は、エネルギー配給中の変動する熱及び電気的特性の効果を軽減することができ、それは、より正確、安全及び有効な神経アブレーション手順を促進し得る。更に、血管開存性を維持することにより、血液は、デバイスが除去された後で血管を流れることができ、後時に神経アブレーション手順を繰り返すことが必要な場合、デバイスが、開存した静脈に配給されてよい。図示のように、バルーン448は比較的長くて細型であり、エネルギー配給要素(複数可)447を、標的神経が交差し得る範囲30内に位置決めするように構成されている。例えば、バルーン448は、2.5~4cmの範囲(例えば、約3cm)の長さを有してよい。カテーテル用のバルーンを製造する為の材料と方法は当技術分野で知られている。バルーン448は、バルーン上に配置された膨張ポート450を有し、バルーンを膨張又は収縮させる為に空気又は生理食塩水などの流体を注入又は除去する為にカテーテルの近位領域へのルーメンと流体連通するシャフト449に取り付けられるかシャフト449によって担持されてよい。任意選択的に、シャフト449は、ガイワイヤを介して配給する為のルーメン451を備えてよい。ルーメン451は、バルーン448が静脈を十分に塞いでいるかを評価する為にX線不透過造影剤を肋間静脈40に注入する為にも用いられてもよい。図示のように、エネルギー配給要素(複数可)447は、バルーン448の表面上に実装された多数の電極(例えば、フレックス回路として製造された)を備えてよい。電極は、図43Bの線43C‐43Cに沿って採択した断面である、図43Cに図示した標的神経45に向く方向451(例えば、同じ方向、又は互いに対して0~45度の範囲の半径方向)にバルーン448が向くように、バルーン448の一側部に配向してよい。任意選択的に、エネルギー配給要素は双極又は多極又は多相系RF配給向けに構成された多数のエネルギー配給要素を備える。代替的に、エネルギー配給要素は、単一、長形、可撓性電極を備えてよい。代替的に、電極は、周縁方向のアブレーションを生成する為にバルーンの周囲に配向されてもよい。エネルギー配給要素(複数可)447は、カテーテルを通って、コンピュータ制御アブレーションコンソールに接続され得る場所であるカテーテルの近位領域に通る導体に電気的に接続されてもよく、コンピュータ制御アブレーションコンソールは、神経刺激信号をエネルギー配給要素(複数可)447に配給するようにも機能し得る。
本明細書の開示は、幾つかの実施形態において、アブレーションエネルギーを配給する前に静脈内の血流を減少させることができる方法及びデバイスを記載する。これらの実施形態いずれにおいても、患者の外部に配置され血管内のデバイスと通信するコンソール又は他の装置があってよい。コンソールは、メモリに記憶されてプロセッサによって実行可能なコンピュータ実行可能方法(例えば、アルゴリズム)を含んでよく、コンピュータ実行可能方法はルーメン縮小エネルギーモードとアブレーションエネルギーモードを含み、ルーメン縮小エネルギーモードは、開始されると、医療デバイスのエネルギー配給要素から第1のタイプのエネルギーを生成させて配給させるように適合され、アブレーションエネルギーモードは、開始されると、医療デバイスの第2のエネルギー配給要素から第2のタイプのエネルギーを生成させて配給させるように適合され、第2のタイプは第1のタイプとは異なり、エネルギー配給要素と第2のエネルギー配給要素は同じ要素であっても、又は医療デバイス上の異なる要素でもよい。異なるタイプのエネルギーはそれぞれ、ルーメン縮小ステップ及びアブレーションステップ用に適合され得る。
標的の静脈として、横隔膜に最も近い肋間静脈を選択する1つの理由は、融除エネルギー(例えば、熱エネルギー)からの肺への潜在的な損傷を極減することである。図6Bを参照すると、標的神経は幾つかの臓器及び組織によって包囲されている。脊椎骨、骨格筋、横隔膜及び壁側胸膜60などの、それらのうち幾つかは、高血流による熱から本質的に保護されているか、又は、健康又は生命へのリスクなしに瘢痕を維持できる。しかしながら。肺組織は比較的うまく灌流できず、熱を効率よく分散又は伝導することができない。肺は臓側胸膜61と呼ばれる薄い膜に封入されている。臓側胸膜がアブレーションによる熱によって損傷し穿孔されると、空気が胸膜腔62に逃げ込んで気胸が発生する可能性がある。臨床診療では、気胸は胸腔チューブの配置によって媒介されるが、気胸を全面的に回避するほうが好ましい。
〔付記1〕
経血管標的神経のアブレーションの為の装置であって、
血管ルーメン内に挿入されるように構成された長形シャフトに接続するように構成された配給デバイスを備え、前記配給デバイスが、
血管に沿った位置でのルーメンのサイズ又は血管に沿った位置での血流のうち少なくとも1つを減少させ、
前記標的神経のアブレーション向けに構成されたアブレーションエネルギーを配給する、
ように構成されている装置。
〔付記2〕
前記配給デバイスは、少なくともルーメン縮小エネルギーモードとアブレーションエネルギーモードで動作するように構成され、
前記ルーメン縮小エネルギーモードでは、前記配給デバイスは、第1のエネルギーが生成されて、エネルギー配給要素から配給されるように適合され、
前記アブレーションエネルギーモードでは、前記配給デバイスは、前記第1のエネルギーとは異なる第2のエネルギーを生成させて、前記又は更なるエネルギー配給要素から配給させるように適合されている、付記1に記載の装置。
〔付記3〕
前記長形シャフトが、
前記長形シャフトの一部分によって担持される幾つかの電極を備え、
前記配給デバイスが、
前記幾つかの電極にエネルギーを配給するように構成された電源と、
電源に接続されたコントローラを備え、前記コントローラは、以下のコントローラステップを実行するように構成されている:
前記配給デバイスがルーメン縮小エネルギーモードである場合、前記電源を、前記幾つかの電極のうち1つに、血管ルーメンのサイズの縮小を引き起こすように構成された第1のエネルギーを配給させるように制御し、
配給デバイスがアブレーションエネルギーモードである場合、前記電源を、前記幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こすように構成された第2のエネルギーを配給させるように制御する、ことを含む、付記2に記載の装置。
〔付記4〕
前記長形シャフトが、
前記長形シャフトの一部分によって担持される幾つかの電極と、
別の長形シャフトの一部分によって担持される更なる幾つかの電極を備えた別の長形シャフトと、を備え、
前記配給デバイスが、
前記幾つかの電極と、前記別の幾つかの電極にエネルギーを配給するように構成された電源と、
電源に接続されたコントローラを備え、前記コントローラは、以下のコントローラステップを実行するように構成される:
前記配給デバイスがルーメン縮小エネルギーモードである場合、前記電源を、前記幾つかの電極のうち1つに、血管ルーメンのサイズの縮小を引き起こすように構成された第1のエネルギーを配給させるように制御し、
配給デバイスがアブレーションエネルギーモードである場合、前記電源を、前記幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こすように構成された第2のエネルギーを配給させるように制御する、ことを含む付記2に記載の装置。
〔付記5〕
前記電源を、前記幾つかの電極のうち1つに、血管ルーメンのサイズの縮小を引き起こすように構成された第1のエネルギーを配給させるように制御することは、
前記幾つかの電極に電気的信号を配給して、
電極表面を所定温度に加熱する、
電極から刺激信号の発出を引き起こして欠陥を収縮させる、
のうち1つ以上を引き起こすことを含む付記3又は4に記載の装置。
〔付記6〕
前記電源を、前記幾つかの電極のうち1つに、血管ルーメンのサイズの縮小を引き起こすように構成された第1のエネルギーを配給させるように制御することは、高周波電流を配給することを含む、付記3又は4又は5に記載の装置。
〔付記7〕
前記電源を、前記幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こすように構成された第2のエネルギーを配給させるように制御することは、融除高周波電流を配給することを含む、付記5乃至6のいずれか一項と組み合わせた付記3に記載の装置。
〔付記8〕
前記電源を、前記更なる幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こすように構成された第2のエネルギーを配給させるように制御することは、融除高周波電流を配給することを含む、付記5乃至6のいずれか一項と組み合わせた付記4に記載の装置。
〔付記9〕
前記第2のエネルギーの融除高周波電流は、前記第1のエネルギーの高周波電流よりも低出力且つより長い持続時間で配給される、付記7又は8に記載の装置。
〔付記10〕
前記第1のエネルギーは10~20Wの範囲の出力で5~15秒の範囲の持続時間にわたるRFエネルギーであり、前記第2のエネルギーは2~10Wの範囲の出力で1~2分の範囲の持続時間にわたるRFエネルギーである、付記9に記載の装置。
〔付記11〕
前記電源は、前記第1のエネルギーと第2のエネルギーを同じ電極に逐次配給するように構成され、又は、前記幾つかの電極は少なくとも1つの血管制限要素と少なくとも1つのアブレーション要素を備え、更に、前記電源は、前記第1のエネルギーを前記血管制限要素に配給し、前記第2のエネルギーを前記アブレーション要素に配給するように構成される、付記5乃至7、9、10のいずれか一項に記載の装置。
〔付記12〕
長形シャフトと別の長形シャフトが互いに結合され、長形シャフトは別の長形シャフトに対してスライド可能であり、任意選択的に長形シャフトは別の長形シャフトの内部でスライド可能であり、その為、前記別の長形シャフトによって担持される別の幾つかの電極が、前記長形シャフトによって担持される前記幾つかの電極から距離を置いて位置決め可能となる、付記5乃至7、9、10のいずれか一項に記載の装置。
〔付記13〕
前記コントローラは、前記第1のエネルギーを、次に前記第2のエネルギーを逐次配給して、先ず前記血管ルーメンの閉塞又は部分閉塞を引き起こし、次に前記標的神経のアブレーションを引き起こすように構成される、付記3乃至12のいずれか一項に記載の装置。
〔付記14〕
前記長形シャフトは、
長形シャフトの一部分によって担持される幾つかの電極を備え、その結果、前記長形シャフトが血管ルーメンに挿入された状態で、幾つかの電極が標的神経に近接して位置決めされることができ、
前記配給デバイスが、
前記幾つかの電極にエネルギーを配給するように構成された電源と、真空源又は血管収縮剤源又はバルーン膨張流体の源のうち少なくとも1つを含む源に接続可能な通路な通路を備え、前記通路が幾つかの電極に近接して配置された開口を有する、又は前記通路が幾つかの電極に近接して配置されたバルーンを供給し、
更に、前記電源に接続され、前記源に接続可能なコントローラを備え、前記コントローラは、以下のコントローラステップ:
前記配給デバイスがルーメン縮小エネルギーモードである場合、前記源を、それぞれ、前記血管ルーメンのサイズ縮小を引き起こす為の、前記開口を通じた流体の吸引、又は、前記血管ルーメンのサイズ縮小を引き起こす為の、前記開口を通じた前記血管収縮剤の配給、又は、前記バルーンを膨張させ、前記血管ルーメンを閉塞する為の、前記バルーン膨張流体の供給、のうち1つを行なわせるように制御し、
前記配給デバイスがアブレーションエネルギーモードである場合、前記電源を、前記幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こさせるように構成されたエネルギーを配給するように制御する、
を実行するように構成された付記2に記載の装置。
〔付記15〕
前記コントローラは、前記源を、次に前記電源を逐次制御して、先ず、前記流体の吸引、又は、前記血管収縮剤の配給、又は、前記バルーン膨張流体の供給のうち1つを引き起こさせ、次に、前記幾つかの電極への前記エネルギーの配給を引き起こさせて、それによって先ず前記血管ルーメンの閉塞又は部分閉塞を引き起こし、次に前記標的神経のアブレーションを決定するように構成される、付記14に記載の装置。
〔付記16〕
前記電源を、前記幾つかの電極のうち1つ以上に、前記標的神経のアブレーションを引き起こすように構成されたエネルギーを配給するように制御することは、融除高周波電流を配給することを含む、付記14又は15に記載の装置。
〔付記17〕
前記長形シャフトは、使用時に前記血管ルーメン内に位置決め可能な遠位端を提示し、前記幾つかの電極は、前記電源に接続可能な少なくとも1つのアブレーション要素を備え、
前記装置は、
前記開口が、前記真空源を用いた流体の吸引を可能にすること、又は前記血管収縮剤源を用いた前記血管収縮剤の配給を可能にし、前記開口は、前記アブレーション要素よりも前記長形シャフトの遠位端に接近した前記長形シャフトの一部分に配置されるか、又は位置決め可能であること、又は、
前記長形シャフトの一部分に配置される、又は位置決め可能な前記バルーンは、アブレーション要素よりも長形シャフトの遠位端に接近していること、
のうちいずれかを提示する、付記14乃至16のいずれか一項に記載の装置。
〔付記18〕
前記通路はバルーン膨張流体の前記源と流体接続可能であって、前記幾つかの電極に近接して配置されたバルーンを供給し、更に、前記通路は前記バルーンを遠位に担持し、前記長形シャフトは前記通路をスライド可能に収容する、又は前記長形シャフトと前記通路は両方とも、共通のガイドシース内にスライド可能に収容されて、その結果、前記バルーンが、前記長形シャフトによって担持される前記幾つかの電極から距離を置いて位置決めされ、任意選択的に、前記バルーンは、前記幾つかの電極と比べてより遠位に位置決め可能である、付記14乃至17のいずれか一項に記載の装置。
〔付記19〕
前記コントローラは、以下のコントローラステップ:
前記電源を、前記幾つかの電極のうち1つ又は前記別の幾つかの電極に、胸内臓神経に向けた神経刺激信号を配給するように制御する、
刺激信号に対する生理反応の尺度を受信する、を実行するように構成され、前記刺激信号に対する生理反応の尺度は、前記装置の専用センサによって、幾つかの電極のうち1つによって、又は前記別の幾つかの電極のうち1つによって検出可能である、付記3乃至18のいずれか一項に記載の装置。
〔付記20〕
前記コントローラは更に、前記電源を、前記幾つかの電極のうち1つに、分離した時間間隔で複数回供給するように制御するコントローラステップを実行するように構成され、前記エネルギーは、前記標的神経のアブレーションを引き起こすように構成されている、付記3乃至19のいずれか一項に記載の装置。
〔付記21〕
前記幾つかの電極に近接した位置で長形シャフトに関連する、又は前記別の幾つかの電極に近接した位置で別の長形シャフトに関連する温度センサを備え、
前記温度センサはコントローラに接続され、前記コントローラは、以下のコントローラステップ:
前記温度センサから温度検出信号を受信する、
前記温度信号から、温度センサに接触している、又は温度センサ近傍にある組織の実温度を判断する、
実温度を目標温度と比較する、
前記電源を、配給デバイスがアブレーションエネルギーモードである場合に、実温度が目標温度に達するまで、前記幾つかの電極又は前記別の幾つかの電極に、特に5W~15Wの範囲の出力でのRFアブレーションエネルギーを配給するように制御する、
を実行するように構成される、付記3乃至20のいずれか一項に記載の装置。
〔付記22〕
前記長形シャフトは、前記幾つかの電極に近接した位置で前記長形シャフトに関連する、又は前記別の幾つかの電極に近接した位置で前記別の長形シャフトに関連するインピーダンスセンサを備え、
前記インピーダンスセンサは前記コントローラに接続可能であり、前記コントローラは、以下のコントローラステップ:
前記インピーダンスセンサからインピーダンス検出信号を受信し、
前記インピーダンス検出信号から、前記インピーダンスセンサに接触している、又は近接している組織の実インピーダンスを決定し、
前記実インピーダンスを目標インピーダンスと比較し、
前記組織内の実インピーダンスの、目標インピーダンスを超えた上昇に応答して、ルーメン縮小モードを中断するように電源又は源を制御し、前記目標インピーダンスは任意選択的に250~300オームの範囲である、
を実行するように構成される、付記3乃至21のいずれか一項に記載の装置。
〔付記23〕
前記長形シャフト部分が、5mm以下、好ましくは3mm以下の最大半径方向寸法を有する断面を呈する、付記1乃至21のいずれか一項に記載の装置。
〔付記24〕
前記長形シャフトは配給シース内にスライド可能に案内される、付記1乃至22のいずれか一項に記載の装置。
〔付記25〕
前記長形シャフトはガイドワイヤ越しに案内される、付記1乃至23のいずれか一項に記載の装置。
〔付記26〕
前記コントローラは、制御ユニットに接続されたメモリに記憶された実行可能なコンピュータプログラムを実行することができるデジタル制御ユニットである、付記3乃至24のいずれか一項に記載の装置。
〔付記27〕
前記長形シャフトを備えた付記1乃至25のいずれか一項に記載の装置。
〔付記28〕
前記源を備えた付記14乃至26のいずれか一項に記載の装置。
〔付記29〕
メモリに記憶されたコンピュータ実行可能プログラムであって、前記コンピュータ実行可能プログラムは、付記23の装置のコントローラによって実行された場合に、前記コントローラに、付記1乃至27に記載のいずれかのコントローラステップを実行させるように構成されているコンピュータ実行可能プログラム。
〔付記30〕
少なくとも心不全又は心不全の症状を治療する為の胸内臓神経の経血管アブレーションの方法であって、
アブレーション要素を担持する長形シャフトを、胸内臓神経に近接した肋間静脈へと進め、前記肋間静脈はルーメンを有し、
前記肋間静脈に沿った位置で前記ルーメンのサイズを縮小し、
前記縮小ステップの後で、前記アブレーション要素から胸内臓神経のほうにアブレーションエネルギーを配給し、
胸内臓神経の少なくとも一部分を前記アブレーションエネルギーで融除して少なくとも高血圧症を治療する、ことを含む方法。
〔付記31〕
前記ルーメンのサイズを縮小することは、前記位置で前記ルーメンを完全に閉塞することを含む付記29に記載の方法。
〔付記32〕
前記ルーメンのサイズを縮小することは、肋間静脈にエネルギーを配給することを含む付記29に記載の方法。
〔付記33〕
肋間静脈にエネルギーを配給することは、肋間静脈の少なくとも一部分を加熱することと、肋間静脈の少なくとも一部分に電気的信号を印加することのうち少なくとも1つを含む付記31に記載の方法。
〔付記34〕
前記ルーメンのサイズを縮小することは、肋間静脈の少なくとも一部分を機械的に刺激することと、肋間静脈の少なくとも少なくとも一部分に真空を印加することと、血管収縮薬を肋間静脈の少なくとも一部分に配給することとの少なくとも1つを含む付記29に記載の方法。
〔付記35〕
前記ルーメンのサイズを縮小することは、肋間静脈の平滑筋を収縮させることを含む付記29に記載の方法。
〔付記36〕
前記ルーメンのサイズを縮小することは、肋間静脈壁内のコラーゲン線維を変性させることを含む付記29に記載の方法。
〔付記37〕
更に、アブレーションエネルギーの配給を開始する前に、隣接する奇静脈から血流を逸らせるか、又は隣接する奇静脈系の一部分を少なくとも部分的に閉塞することを含む付記29に記載の方法。
〔付記38〕
隣接する奇静脈から血流を逸らせるか、又は隣接する奇静脈系の一部分を少なくとも部分的に閉塞することは、肋間静脈が奇静脈系に合流する開口部を閉塞することを含む付記36に記載の方法。
〔付記39〕
前記位置は、前記アブレーション要素から胸内臓神経のほうにアブレーションエネルギーを配給するときに肋間静脈内に前記アブレーション要素が位置決めされる位置に対して上流である付記29に記載の方法。
〔付記40〕
前記位置は、前記アブレーション要素から胸内臓神経のほうにアブレーションエネルギーを配給するときに肋間静脈内に前記アブレーション要素が位置決めされる位置と少なくとも部分的に重複する付記29に記載の方法。
〔付記41〕
前記アブレーションエネルギーを配給することは、融除高周波電流を配給することを含む付記29に記載の方法。
〔付記42〕
前記ルーメンのサイズを縮小することは、高周波電流を肋間静脈に配給することを含み、前記融除高周波電流は、前記ルーメンのサイズを縮小するときに配給される高周波電流よりも低い出力で、より長い持続時間にわたり配給される、付記40に記載の方法。
〔付記43〕
ルーメンのサイズを縮小することは、前記アブレーション要素からエネルギーを配給することを含む、付記29に記載の方法。
〔付記44〕
更に、胸内臓神経のほうに神経刺激信号を配給し、前記刺激信号に対する生理反応を測定することによって胸内臓神経への近接度を決定することを含む付記29に記載の方法。
〔付記45〕
痛覚線維を電気的に刺激せずに標的の胸内臓神経を電気的に刺激するように構成された付記43に記載の方法。
〔付記46〕
前記エネルギー配給電極は、前記標的胸内臓神経から0~5mm以内である肋間静脈内に位置決めされ、前記刺激信号は、0.05V~5Vで0.12ms~0.9msの範囲内のパルス持続時間の電圧を含む付記44に記載の方法。
〔付記47〕
前記刺激要素は3~8フレンチの外径と0.5mm~4mmの長さを有し、前記波形は、0.12msのパルス持続時間で30~500V/mの範囲の電界強度を生成するように構成される付記44に記載の方法。
〔付記48〕
アブレーションエネルギーを配給した後で、前記アブレーション要素を肋間静脈内で異なる位置に移動させ、前記アブレーション要素から胸内臓神経のほうにアブレーションエネルギーを再び配給することを更に含む付記29に記載の方法。
〔付記49〕
前記ルーメンのサイズを複数の位置で縮小することを更に含む付記29に記載の方法。
〔付記50〕
第2の長形シャフトを奇静脈内に位置決めすることを更に含み、アブレーション要素を担持する長形シャフトを肋間静脈内に進めることは、前記長形シャフトを前記第2の長形シャフトから遠ざかる方向に、肋間静脈内に延出させることを含む付記29に記載の方法。
〔付記51〕
血液を、肋間静脈が奇静脈系に合流する開口部から逸れる方向に分岐させることを更に含む付記29に記載の方法。
〔付記52〕
血管からの神経の、経血管アブレーションの為のコンピュータ実行可能方法であって、メモリに記憶されプロセッサによって実行可能なコンピュータ実行可能方法を含み、前記コンピュータ実行可能方法はルーメン縮小エネルギーモードとアブレーションエネルギーモードを含み、前記ルーメン縮小エネルギーモードは、開始されると、医療デバイスのエネルギー配給要素から第1のタイプのエネルギーを生成させて配給させるように適合され、前記アブレーションエネルギーモードは、開始されると、医療デバイスの第2のエネルギー配給要素から第2のタイプのエネルギーを生成させて配給させるように適合され、第2のタイプは第1のタイプとは異なり、前記エネルギー配給要素と前記第2のエネルギー配給要素は同じ要素であっても、又は医療デバイス上の異なる要素であってもよい方法。
〔付記53〕
メモリを含むコンソールを更に備えた付記51に記載の方法。
〔付記54〕
エネルギー配給要素を担持する医療デバイスを更に備え、コンピュータ実行可能方法は、前記エネルギー配給要素へのエネルギー配給をもたらすように適合されている、付記52に記載の方法。
〔付記55〕
前記アブレーションエネルギーモードは、前記ルーメン縮小エネルギーモードより低い出力のエネルギーを含み、より長時間にわたる、付記51に記載の方法。
〔付記56〕
前記ルーメン縮小モードは10~20Wの範囲の出力でのRFエネルギーを5~15秒の範囲の持続時間にわたり配給し、前記アブレーションエネルギーモードは2~10Wの範囲の出力でのRFエネルギーを1~2分の範囲の持続時間にわたり配給する、付記54に記載の方法。
〔付記57〕
前記アブレーションエネルギーモードは更に、目標温度に達するまで、5~15Wの範囲の出力でのRFエネルギーの初期配給を含む、付記54に記載の方法。
〔付記58〕
前記ルーメン縮小エネルギーモードは任意選択的に約150オームから250~300オームまでの組織インピーダンスの上昇に応答してエネルギー配給を停止するか、又は停止を開始するように適合されている、付記51に記載の方法。
〔付記59〕
コンピュータ実行可能方法は、入力を受け取ると、前記アブレーションエネルギーモードを開始するように適合されている、付記51に記載の方法。
〔付記60〕
前記コンピュータ実行可能方法は更に、入力を受け取ると、前記ルーメン縮小エネルギーモードを停止し、任意選択的に、前記アブレーションエネルギーモードを自動開始するように適合されている、付記51に記載の方法。
〔付記61〕
肋間静脈内から胸内臓神経を融除する方法であって、
ガイドワイヤ越しに配給シャフトを奇静脈内に血管内で位置決めし、前記配給シャフトは内部にサイドポートを有し、
前記配給シャフトを回転させて前記サイドポートを、奇静脈が肋間静脈に合流する開口部のほうに配向させ、
長形部材を、前記サイドポートから出して肋間静脈へと進め、前記長形部材はアブレーションエネルギー要素を担持し、
肋間静脈内の血流量を減少させ、
前記アブレーション要素から胸内臓神経のほうにアブレーションエネルギーを配給し、
胸内臓神経の少なくとも一部を融除する、ことを含む方法。
〔付記62〕
ガイドワイヤを、前記長形部材のルーメンを通って及び肋間静脈へと配給することを更に含む付記60に記載の方法。
〔付記63〕
長形部材を、前記サイドポートから出して肋間静脈へと進めることは、膨張可能なバルーンを担持する長形部材を進めることを含み、血流量を減少させることは、バルーンを膨張させることを含む、付記60に記載の方法。
〔付記64〕
前記バルーンを膨張させることは、前記アブレーションエネルギー要素を肋間静脈壁に接触させる、付記62に記載の方法。
〔付記65〕
前記バルーンを膨張させることは、前記バルーンを通して流体を循環させることを含む付記62に記載の方法。
〔付記66〕
前記配給シャフトを遠位に移動させて、肋間静脈と奇静脈の分岐点を係合することを更に含む付記60に記載の方法。
〔付記67〕
更に、前記長形部材のルーメンを通って、肋間静脈へと造影剤を配給して、肋間静脈が十分に閉塞されたかを判断することを含む付記60に記載の方法。
〔付記68〕
前記アブレーションエネルギーを配給することは、2~20Wの範囲の出力レベルのRFエネルギーを、30~240秒にわたり配給することを含む、付記60に記載の方法。
〔付記69〕
少なくとも1つの電極を担持するアブレーションカテーテルと、
少なくとも1つの電極に作動的に結合するように構成されたアブレーションエネルギーコンソールと、
患者の呼吸サイクルを感知する第1の組の出力信号を出力する生理的モニタと、
第1の組の信号を入力として受信して、第2の組の信号を生成するように構成されたコンピュータ制御コントローラを備え、
前記第2の組の信号は、アブレーションエネルギーコンソールによるアブレーションエネルギーの配給をアブレーションカテーテル電極に同期化する、ことを含む、胸内臓神経又は胸内臓神経根の血管内アブレーションの為のシステム。
〔付記70〕
胸内臓神経又は胸内臓神経根に近接して血管内に導入されるアブレーションカテーテルによって担持される電極に作動的に結合するように構成されたアブレーションエネルギーコンソールと、
患者の呼吸サイクルを感知する第1の組の信号を出力する生理的モニタと、
前記第1の組の信号を入力として受信して、第2の組の信号を生成するように構成されたコンピュータ制御コントローラを備え、
前記第2の組の信号は前記アブレーションエネルギーコンソールによるアブレーションエネルギーの配給を前記アブレーションカテーテル電極に同期化する、ことを含む胸内臓神経又は胸内臓神経根の血管内アブレーションの為のシステム。
〔付記71〕
アブレーションカテーテルを、胸内臓神経又は胸内臓神経根に近接して血管内に導入し、
前記アブレーションカテーテルを、アブレーションコンソールへの作動接続向けに構成し、
患者の呼吸サイクルに相関した生理的状態を監視し、
前記生理的状態に相関する第1の組の信号をコンピュータ制御コントローラに出力し、
前記コンピュータ制御コントローラによって第2の組の信号を生成し、
前記第2の組の信号を用いて、アブレーションエネルギーコンソールによるエネルギーの配給を同期化する、ことを含む胸内臓神経又は胸内臓神経根の融除方法。
〔付記72〕
アブレーションシステムであって、
アブレーションカテーテルに接続可能な信号発生器を含み、前記信号発生器が、
前記信号発生器と前記アブレーションカテーテルの間の電気的連通を可能にするように構成されたアダプタと、
コンピュータ実行可能方法を記憶するメモリと、
メモリに接続可能なコントローラを備え、前記コントローラは、コンピュータ実行可能方法を実行するように構成され、前記コンピュータ実行可能方法が、以下の、
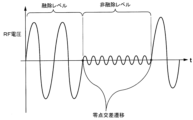
信号発生器によって受信された、受信インピーダンス測定信号に応答して、受信したインピーダンス測定信号が、肺が感度ゾーンにはないことを示す、又は、カテーテルによって担持されるアブレーション要素から安全な距離にあることを示すかどうかを判断するステップと、
肺が感度ゾーンにはないこと、又は、肺がアブレーション要素から安全な距離にあることの判断に応答して、アブレーションレベルでのアブレーション信号を発生させるステップと、
判断ステップを繰り返すステップと、
肺が感度ゾーンに不在ではないこと、又は、肺が前記アブレーション要素から安全な距離にないことの判断に反応して、アブレーションレベルでのアブレーション信号を中断するステップと、
判断ステップを繰り返すステップと、
前記中断ステップに引き続いた時点で、肺が感度ゾーンにはないこと、又は、肺が前記アブレーション要素から安全な距離にあることの判断に応答して、アブレーションレベルでのアブレーション信号を再発生させるステップと、
を含む、アブレーションシステム。
〔付記73〕
前記コントローラはアブレーションカテーテルのアブレーション要素に接続された電源に作用し、前記アブレーション信号の生成又は中断は、前記電源をそれぞれ、前記アブレーション要素に、対応する前記アブレーションエネルギーを送信させる、又は送信を停止させる、付記71に記載のアブレーションシステム。
〔付記74〕
更にアブレーションカテーテルを備えた付記71乃至72に記載のアブレーションシステム。
〔付記75〕
高血圧症及び心不全のうち少なくとも1つを治療する為に胸内臓神経又は胸内臓神経根を融除する方法であって、
長形医療デバイスを肋間静脈へと進め、前記長形医療デバイスはアブレーションエネルギー要素を担持し、
前記アブレーションエネルギー要素を、胸内臓神経又は胸内臓神経根に近接する位置に位置決めし、
前記アブレーションエネルギー要素から、胸内臓神経及び胸内臓神経根のうち少なくとも1つにアブレーションエネルギーを配給し、
胸内臓神経及び胸内臓神経根のうち少なくとも1つの少なくとも一部分を融除して、胸内臓神経及び胸内臓神経根のうち少なくとも1つの伝導を不可逆的に減少させる、ことを含む方法。
〔付記76〕
肋間静脈は脊髄周囲領域内のレベル8、9、10又は11肋間静脈である、付記74に記載の方法。
〔付記77〕
肋間静脈は患者の右側にある、付記74に記載の方法。
〔付記78〕
前記アブレーションエネルギーを配給することは、前記アブレーション要素から、肋間静脈が奇静脈から分岐する開口部から5cm以内にエネルギーを配給することを含む、付記74に記載の方法。
〔付記79〕
前記アブレーションエネルギーを配給することは、RF、マイクロ波、超音波、極低温、化学及びレーザーのエネルギータイプから少なくとも1つを配給することを含む、付記74に記載の方法。
〔付記80〕
肋間静脈内に位置決めされた第2のアブレーションエネルギー要素からアブレーションエネルギーを配給することを更に含む付記74に記載の方法。
〔付記81〕
前記アブレーションエネルギーを配給することは、肋間静脈が奇静脈から分岐する開口部と、肋間静脈が肋骨関節に交差する位置との間の領域において、前記アブレーション要素からエネルギーを配給することを含む、付記74に記載の方法。
〔付記82〕
電気的刺激、極低温一時刺激(stunning)、化学薬剤配給及び視覚X線不透過又はエコー源性マーカのイメージングステップのうち少なくとも1つを用いて、胸内臓神経及び胸内臓神経根のうち少なくとも1つに相対したアブレーションエネルギー要素の位置を確認することを更に含む付記74の方法。
〔付記83〕
痛覚線維を電気的に刺激せずに標的胸内臓神経を電気的に刺激するように構成された付記81に記載の方法。
〔付記84〕
エネルギー配給電極は、前記標的胸内臓神経から0~5mm以内である肋間静脈内に位置決めされ、刺激信号がエネルギー配給電極から配給され、刺激信号は、0.05V~5Vの範囲の電圧と、0.12msから0.9msの範囲のパルス持続時間を備えている付記82に記載の方法。
〔付記85〕
前記刺激要素は3~8フレンチの外径と0.5mm~4mmの長さを有し、前記波形は、0.12msのパルス持続時間で30~500V/mの範囲の電界強度を生成するように構成されることを含む付記82に記載の方法。
14,22 アブレーション要素
15 コンピュータコントローラ
16 アブレーションエネルギー源
17 ユーザインターフェース
18 電気的刺激エネルギー源
19 ディスプレイ
20 コンソール
21 換気モニタ
23,32 電気的刺激要素
25 肺検出要素
40 肋間静脈
41 奇静脈
42 大動脈
43 半奇静脈
45 GSN
49 交感神経幹
50 腹腔神経節
52 横隔膜
54 肋椎関節
55 胸椎骨
130 左鎖骨下静脈
131 ガイドワイヤ
140 カテーテル
141 アブレーション要素
143 展開可能な構造
146 刺激
150 アブレーション行路、領域
202 電極
255 シース
256 アブレーション電極
257 アブレーションカテーテル
291 超音波アブレーション要素
293 バルーン
294 レール
295 インピーダンスモニタ
300 TSNアブレーションカテーテル
301,302 電極
303 インピーダンス監視電極
305 偏向可能領域
306 ガイドワイヤ
307 方向
Claims (1)
- 経血管標的神経のアブレーションの為の装置であって、
血管の内側の空洞である血管ルーメン内に挿入されるように構成された長形シャフトに接続するように構成された配給デバイスを備え、前記配給デバイスが、
第1のエネルギーをエネルギー配給要素から生成させて配給させるためのルーメン縮小エネルギーモードでは、前記血管に沿った位置での前記血管ルーメンのサイズを減少させ、
前記第1のエネルギーとは異なる第2のエネルギーを前記エネルギー配給要素又は別のエネルギー配給要素から生成させて配給させるためのアブレーションエネルギーモードでは、前記血管に沿った位置での前記血管ルーメンの前記サイズが減少している間に、前記標的神経のアブレーション向けに構成されたアブレーションエネルギーを配給する、
ように構成されている装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023007759A JP2023040300A (ja) | 2016-07-29 | 2023-01-23 | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 |
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662368912P | 2016-07-29 | 2016-07-29 | |
| US62/368,912 | 2016-07-29 | ||
| US201662411492P | 2016-10-21 | 2016-10-21 | |
| US62/411,492 | 2016-10-21 | ||
| US201762482142P | 2017-04-05 | 2017-04-05 | |
| US62/482,142 | 2017-04-05 | ||
| PCT/US2017/044747 WO2018023132A1 (en) | 2016-07-29 | 2017-07-31 | Devices, systems, and methods for treatment of heart failure by splanchnic nerve ablation |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023007759A Division JP2023040300A (ja) | 2016-07-29 | 2023-01-23 | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019527121A JP2019527121A (ja) | 2019-09-26 |
| JP2019527121A5 JP2019527121A5 (ja) | 2020-09-10 |
| JP7217230B2 true JP7217230B2 (ja) | 2023-02-02 |
Family
ID=61017627
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019526210A Active JP7217230B2 (ja) | 2016-07-29 | 2017-07-31 | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 |
| JP2023007759A Pending JP2023040300A (ja) | 2016-07-29 | 2023-01-23 | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023007759A Pending JP2023040300A (ja) | 2016-07-29 | 2023-01-23 | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US11154354B2 (ja) |
| EP (1) | EP3490442A4 (ja) |
| JP (2) | JP7217230B2 (ja) |
| CN (2) | CN109843160B (ja) |
| AU (2) | AU2017301911B2 (ja) |
| CA (1) | CA3031766A1 (ja) |
| WO (1) | WO2018023132A1 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11389232B2 (en) | 2006-06-28 | 2022-07-19 | Kardium Inc. | Apparatus and method for intra-cardiac mapping and ablation |
| US9119633B2 (en) | 2006-06-28 | 2015-09-01 | Kardium Inc. | Apparatus and method for intra-cardiac mapping and ablation |
| US8906011B2 (en) | 2007-11-16 | 2014-12-09 | Kardium Inc. | Medical device for use in bodily lumens, for example an atrium |
| US10827977B2 (en) | 2012-05-21 | 2020-11-10 | Kardium Inc. | Systems and methods for activating transducers |
| US9693832B2 (en) | 2012-05-21 | 2017-07-04 | Kardium Inc. | Systems and methods for selecting, activating, or selecting and activating transducers |
| US9198592B2 (en) | 2012-05-21 | 2015-12-01 | Kardium Inc. | Systems and methods for activating transducers |
| GB2532044A (en) | 2014-11-06 | 2016-05-11 | Phagenesis Ltd | Catheter for recovery of dysphagia |
| US10722184B2 (en) | 2014-11-17 | 2020-07-28 | Kardium Inc. | Systems and methods for selecting, activating, or selecting and activating transducers |
| US10368936B2 (en) | 2014-11-17 | 2019-08-06 | Kardium Inc. | Systems and methods for selecting, activating, or selecting and activating transducers |
| US10376308B2 (en) | 2015-02-05 | 2019-08-13 | Axon Therapies, Inc. | Devices and methods for treatment of heart failure by splanchnic nerve ablation |
| US10207110B1 (en) | 2015-10-13 | 2019-02-19 | Axon Therapies, Inc. | Devices and methods for treatment of heart failure via electrical modulation of a splanchnic nerve |
| EP3490442A4 (en) | 2016-07-29 | 2020-03-25 | Axon Therapies, Inc. | DEVICES, SYSTEMS AND METHODS FOR THE TREATMENT OF HEART FAILURE BY ABLATION OF SPLANCHNIC NERVE |
| US10561461B2 (en) * | 2017-12-17 | 2020-02-18 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| US11751939B2 (en) | 2018-01-26 | 2023-09-12 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| EP3590428B1 (de) * | 2018-07-06 | 2022-10-19 | Siemens Healthcare GmbH | Verfahren und bildgebendes gerät zum erzeugen eines roadmap-bildes |
| EP3823548A4 (en) * | 2018-07-19 | 2022-07-13 | The University Of Sydney | LESION-FORMING ABLATION DEVICE |
| CN113164074A (zh) * | 2018-12-21 | 2021-07-23 | 美敦力公司 | 急性心力衰竭监测和治疗 |
| EP3685772A1 (en) * | 2019-01-24 | 2020-07-29 | Aorticlab Sarl | Device for the treatment of tissue calcification |
| AU2020296866A1 (en) | 2019-06-20 | 2021-10-14 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| US20210138239A1 (en) | 2019-09-25 | 2021-05-13 | Swift Sync, Llc | Transvenous Intracardiac Pacing Catheter |
| JP2023501255A (ja) * | 2019-11-01 | 2023-01-18 | テルモ カーディオバスキュラー システムズ コーポレイション | 半自律的な医療システムおよび方法 |
| US11413090B2 (en) | 2020-01-17 | 2022-08-16 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| EP3909640A1 (en) * | 2020-05-12 | 2021-11-17 | Surgicen SLU | Medical device for spinal cord stimulation |
| CN111790041A (zh) * | 2020-05-25 | 2020-10-20 | 襄阳市中心医院 | 一种双隧道技术经颈内静脉留置picc导管方法 |
| CN111653363A (zh) * | 2020-06-23 | 2020-09-11 | 南京诺源医疗器械有限公司 | 一种基于仿真温度场的微波消融术中疗效评估方法 |
| CN111772773B (zh) * | 2020-06-23 | 2021-11-30 | 广州启骏生物科技有限公司 | 环肺动脉刺激消融导管 |
| US12076071B2 (en) | 2020-08-14 | 2024-09-03 | Kardium Inc. | Systems and methods for treating tissue with pulsed field ablation |
| US20220061913A1 (en) | 2020-08-28 | 2022-03-03 | Biosense Webster (Israel) Ltd. | Proximal Electrode Cooling |
| WO2022045530A1 (ko) * | 2020-08-28 | 2022-03-03 | 재단법인 오송첨단의료산업진흥재단 | 신경 차단을 위한 고주파 수술 기기 및 시스템 |
| US11992681B2 (en) | 2020-11-20 | 2024-05-28 | Phagenesis Limited | Devices, systems, and methods for treating disease using electrical stimulation |
| US20220323142A1 (en) * | 2020-12-23 | 2022-10-13 | Axon Therapies, Inc. | Methods, systems and devices for endovascular electroporation of a greater splanchnic nerve |
| US11980756B2 (en) | 2021-01-20 | 2024-05-14 | Swift Sync, Inc. | Transvenous intracardiac pacing catheter |
| US20220313981A1 (en) * | 2021-04-06 | 2022-10-06 | Phagenesis Limited | Pharyngeal electrical stimulation devices, systems, and methods |
| EP4108197A1 (en) | 2021-06-24 | 2022-12-28 | Gradient Denervation Technologies | Systems for treating tissue |
| US20230200637A1 (en) * | 2021-12-29 | 2023-06-29 | Dorna Hakimimehr | Devices and methods for endoscopic neuroablation in the tympanic cavity |
| US11672595B1 (en) * | 2022-06-15 | 2023-06-13 | Corveus Medical, Inc. | Systems and methods for interrupting nerve activity to treat a medical condition |
| CN115105759A (zh) * | 2022-07-12 | 2022-09-27 | 四川大学华西医院 | 一种利用放射源的心肌病理组织致快速心律失常治疗导管 |
| CN117426857A (zh) * | 2022-07-14 | 2024-01-23 | 波士顿科学医疗器械有限公司 | 治疗静脉曲张的具有可扩张元件和双极电极的消融导管 |
| WO2024191830A1 (en) * | 2023-03-13 | 2024-09-19 | Edwards Lifesciences Corporation | Heart preload modulation |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008510530A (ja) | 2004-08-25 | 2008-04-10 | バイリス メディカル カンパニー インコーポレイテッド | 医療用プローブアセンブリ及びエネルギー伝達システム |
| JP2009500052A (ja) | 2005-06-20 | 2009-01-08 | アブレーション フロンティアズ,インコーポレーテッド | アブレーションカテーテル |
| US20120265198A1 (en) | 2010-11-19 | 2012-10-18 | Crow Loren M | Renal nerve detection and ablation apparatus and method |
| US20120289369A1 (en) | 2011-05-14 | 2012-11-15 | Fogarty Shaun P | Launchable flying device |
Family Cites Families (263)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3301258A (en) | 1963-10-03 | 1967-01-31 | Medtronic Inc | Method and apparatus for treating varicose veins |
| US4403985A (en) | 1981-05-12 | 1983-09-13 | The United States Of America As Represented By The Department Of Health And Human Services | Jet controlled catheter |
| US4862891A (en) | 1988-03-14 | 1989-09-05 | Canyon Medical Products | Device for sequential percutaneous dilation |
| US5649974A (en) | 1992-07-27 | 1997-07-22 | Angeion Corporation | Low profile defibrillation catheter |
| US5860974A (en) | 1993-07-01 | 1999-01-19 | Boston Scientific Corporation | Heart ablation catheter with expandable electrode and method of coupling energy to an electrode on a catheter shaft |
| US5840076A (en) | 1996-04-12 | 1998-11-24 | Ep Technologies, Inc. | Tissue heating and ablation systems and methods using electrode structures with distally oriented porous regions |
| US5797903A (en) | 1996-04-12 | 1998-08-25 | Ep Technologies, Inc. | Tissue heating and ablation systems and methods using porous electrode structures with electrically conductive surfaces |
| US5928229A (en) | 1993-11-08 | 1999-07-27 | Rita Medical Systems, Inc. | Tumor ablation apparatus |
| US5458626A (en) | 1993-12-27 | 1995-10-17 | Krause; Horst E. | Method of electrical nerve stimulation for acceleration of tissue healing |
| US5658282A (en) * | 1994-01-18 | 1997-08-19 | Endovascular, Inc. | Apparatus for in situ saphenous vein bypass and less-invasive varicose vein treatment |
| US5447529A (en) | 1994-01-28 | 1995-09-05 | Philadelphia Heart Institute | Method of using endocardial impedance for determining electrode-tissue contact, appropriate sites for arrhythmia ablation and tissue heating during ablation |
| US5462545A (en) | 1994-01-31 | 1995-10-31 | New England Medical Center Hospitals, Inc. | Catheter electrodes |
| US5454840A (en) | 1994-04-05 | 1995-10-03 | Krakovsky; Alexander A. | Potency package |
| US6044846A (en) | 1994-06-24 | 2000-04-04 | Edwards; Stuart D. | Method to treat esophageal sphincters |
| US5740808A (en) | 1996-10-28 | 1998-04-21 | Ep Technologies, Inc | Systems and methods for guilding diagnostic or therapeutic devices in interior tissue regions |
| US5569198A (en) | 1995-01-23 | 1996-10-29 | Cortrak Medical Inc. | Microporous catheter |
| US6409722B1 (en) | 1998-07-07 | 2002-06-25 | Medtronic, Inc. | Apparatus and method for creating, maintaining, and controlling a virtual electrode used for the ablation of tissue |
| US5800484A (en) | 1995-08-15 | 1998-09-01 | Rita Medical Systems, Inc. | Multiple antenna ablation apparatus with expanded electrodes |
| US5925038A (en) | 1996-01-19 | 1999-07-20 | Ep Technologies, Inc. | Expandable-collapsible electrode structures for capacitive coupling to tissue |
| US5891136A (en) | 1996-01-19 | 1999-04-06 | Ep Technologies, Inc. | Expandable-collapsible mesh electrode structures |
| US6475213B1 (en) | 1996-01-19 | 2002-11-05 | Ep Technologies, Inc. | Method of ablating body tissue |
| US5836874A (en) | 1996-04-08 | 1998-11-17 | Ep Technologies, Inc. | Multi-function electrode structures for electrically analyzing and heating body tissue |
| US5868736A (en) | 1996-04-12 | 1999-02-09 | Ep Technologies, Inc. | Systems and methods to control tissue heating or ablation with porous electrode structures |
| US5830213A (en) | 1996-04-12 | 1998-11-03 | Ep Technologies, Inc. | Systems for heating and ablating tissue using multifunctional electrode structures |
| WO1997025918A1 (en) | 1996-01-19 | 1997-07-24 | Ep Technologies, Inc. | Electrode structures formed from flexible, porous, or woven materials |
| US5961513A (en) | 1996-01-19 | 1999-10-05 | Ep Technologies, Inc. | Tissue heating and ablation systems and methods using porous electrode structures |
| US6071278A (en) | 1996-02-28 | 2000-06-06 | Ep Technologies, Inc. | Tissue heating and ablation systems and methods using porous electrode structures with specified electrical resistivities |
| US5846239A (en) | 1996-04-12 | 1998-12-08 | Ep Technologies, Inc. | Tissue heating and ablation systems and methods using segmented porous electrode structures |
| US5871483A (en) | 1996-01-19 | 1999-02-16 | Ep Technologies, Inc. | Folding electrode structures |
| GB9610765D0 (en) * | 1996-05-23 | 1996-07-31 | Axon Anthony T R | Improvements in or relating to endoscopes |
| US6743197B1 (en) | 1996-07-10 | 2004-06-01 | Novasys Medical, Inc. | Treatment of discrete tissues in respiratory, urinary, circulatory, reproductive and digestive systems |
| US5704908A (en) | 1996-10-10 | 1998-01-06 | Genetronics, Inc. | Electroporation and iontophoresis catheter with porous balloon |
| US5904651A (en) | 1996-10-28 | 1999-05-18 | Ep Technologies, Inc. | Systems and methods for visualizing tissue during diagnostic or therapeutic procedures |
| US5722403A (en) | 1996-10-28 | 1998-03-03 | Ep Technologies, Inc. | Systems and methods using a porous electrode for ablating and visualizing interior tissue regions |
| RU2127075C1 (ru) | 1996-12-11 | 1999-03-10 | Корженевский Александр Владимирович | Способ получения томографического изображения тела и электроимпедансный томограф |
| US6076012A (en) | 1996-12-19 | 2000-06-13 | Ep Technologies, Inc. | Structures for supporting porous electrode elements |
| US5938660A (en) | 1997-06-27 | 1999-08-17 | Daig Corporation | Process and device for the treatment of atrial arrhythmia |
| WO1999002096A1 (en) | 1997-07-08 | 1999-01-21 | The Regents Of The University Of California | Circumferential ablation device assembly and method |
| US6500174B1 (en) | 1997-07-08 | 2002-12-31 | Atrionix, Inc. | Circumferential ablation device assembly and methods of use and manufacture providing an ablative circumferential band along an expandable member |
| US6401719B1 (en) * | 1997-09-11 | 2002-06-11 | Vnus Medical Technologies, Inc. | Method of ligating hollow anatomical structures |
| US6200312B1 (en) | 1997-09-11 | 2001-03-13 | Vnus Medical Technologies, Inc. | Expandable vein ligator catheter having multiple electrode leads |
| US6911028B2 (en) * | 1998-10-28 | 2005-06-28 | John H. Shadduck | Medical instrument working end and method for endoluminal treatments |
| US6685732B2 (en) | 1998-03-31 | 2004-02-03 | Innercool Therapies, Inc. | Method and device for performing cooling- or cryo-therapies for, e.g., angioplasty with reduced restenosis or pulmonary vein cell necrosis to inhibit atrial fibrillation employing microporous balloon |
| US6058331A (en) | 1998-04-27 | 2000-05-02 | Medtronic, Inc. | Apparatus and method for treating peripheral vascular disease and organ ischemia by electrical stimulation with closed loop feedback control |
| US7599736B2 (en) | 2001-07-23 | 2009-10-06 | Dilorenzo Biomedical, Llc | Method and apparatus for neuromodulation and physiologic modulation for the treatment of metabolic and neuropsychiatric disease |
| US6123718A (en) | 1998-11-02 | 2000-09-26 | Polymerex Medical Corp. | Balloon catheter |
| US6425877B1 (en) | 1999-04-02 | 2002-07-30 | Novasys Medical, Inc. | Treatment of tissue in the digestive circulatory respiratory urinary and reproductive systems |
| US20050010095A1 (en) | 1999-04-05 | 2005-01-13 | Medtronic, Inc. | Multi-purpose catheter apparatus and method of use |
| US6890332B2 (en) | 1999-05-24 | 2005-05-10 | Csaba Truckai | Electrical discharge devices and techniques for medical procedures |
| US6885888B2 (en) | 2000-01-20 | 2005-04-26 | The Cleveland Clinic Foundation | Electrical stimulation of the sympathetic nerve chain |
| WO2001066177A1 (fr) | 2000-03-08 | 2001-09-13 | Dr. Japan Co., Ltd. | Canule d'introduction de diagnostic ou de therapie |
| US6569151B1 (en) | 2000-03-10 | 2003-05-27 | Kensey Nash Corporation | Device for connecting a catheter or other tubular member onto a guide-wire without access to the ends of the guide-wire |
| US6454766B1 (en) | 2000-05-05 | 2002-09-24 | Scimed Life Systems, Inc. | Microporous electrode structure and method of making the same |
| US6395325B1 (en) | 2000-05-16 | 2002-05-28 | Scimed Life Systems, Inc. | Porous membranes |
| WO2001087154A1 (en) | 2000-05-18 | 2001-11-22 | Nuvasive, Inc. | Tissue discrimination and applications in medical procedures |
| US6890315B1 (en) | 2000-05-23 | 2005-05-10 | Chf Solutions, Inc. | Method and apparatus for vein fluid removal in heart failure |
| US6569160B1 (en) | 2000-07-07 | 2003-05-27 | Biosense, Inc. | System and method for detecting electrode-tissue contact |
| US6656174B1 (en) | 2000-07-20 | 2003-12-02 | Scimed Life Systems, Inc. | Devices and methods for creating lesions in blood vessels without obstructing blood flow |
| US7054689B1 (en) | 2000-08-18 | 2006-05-30 | Advanced Bionics Corporation | Fully implantable neurostimulator for autonomic nerve fiber stimulation as a therapy for urinary and bowel dysfunction |
| US8086314B1 (en) | 2000-09-27 | 2011-12-27 | Cvrx, Inc. | Devices and methods for cardiovascular reflex control |
| US6638275B1 (en) | 2000-10-05 | 2003-10-28 | Medironic, Inc. | Bipolar ablation apparatus and method |
| US7285199B2 (en) | 2000-10-31 | 2007-10-23 | Hitachi Chemical Research Center, Inc. | Apparatus and method for electrophoretic microspot concentration |
| US6832114B1 (en) | 2000-11-21 | 2004-12-14 | Advanced Bionics Corporation | Systems and methods for modulation of pancreatic endocrine secretion and treatment of diabetes |
| US20020087152A1 (en) | 2001-01-04 | 2002-07-04 | Endocare, Inc. | Systems and methods for delivering a probe into tissue |
| DE60222870T2 (de) | 2001-02-06 | 2008-05-15 | Medtronic Vascular, Inc., Santa Rosa | Vorrichtung für transluminale eingriffe mit geführten kathetern oder anderen geräten, die die gefässwande durchdringen |
| US6648883B2 (en) | 2001-04-26 | 2003-11-18 | Medtronic, Inc. | Ablation system and method of use |
| US6972016B2 (en) | 2001-05-01 | 2005-12-06 | Cardima, Inc. | Helically shaped electrophysiology catheter |
| US20020198520A1 (en) | 2001-06-20 | 2002-12-26 | Scimed Life Systems, Inc. | Irrigation sheath |
| US7778703B2 (en) | 2001-08-31 | 2010-08-17 | Bio Control Medical (B.C.M.) Ltd. | Selective nerve fiber stimulation for treating heart conditions |
| GB0121117D0 (en) | 2001-08-31 | 2001-10-24 | Smiths Group Plc | Fluid gauging |
| JP4229621B2 (ja) | 2002-03-05 | 2009-02-25 | 修 加藤 | 薬液注入カテーテル |
| US7937145B2 (en) | 2002-03-22 | 2011-05-03 | Advanced Neuromodulation Systems, Inc. | Dynamic nerve stimulation employing frequency modulation |
| US7551964B2 (en) | 2002-03-22 | 2009-06-23 | Leptos Biomedical, Inc. | Splanchnic nerve stimulation for treatment of obesity |
| US7239912B2 (en) | 2002-03-22 | 2007-07-03 | Leptos Biomedical, Inc. | Electric modulation of sympathetic nervous system |
| US7236822B2 (en) | 2002-03-22 | 2007-06-26 | Leptos Biomedical, Inc. | Wireless electric modulation of sympathetic nervous system |
| US7689276B2 (en) | 2002-09-13 | 2010-03-30 | Leptos Biomedical, Inc. | Dynamic nerve stimulation for treatment of disorders |
| US7702386B2 (en) | 2002-03-22 | 2010-04-20 | Leptos Biomedical, Inc. | Nerve stimulation for treatment of obesity, metabolic syndrome, and Type 2 diabetes |
| US7689277B2 (en) | 2002-03-22 | 2010-03-30 | Leptos Biomedical, Inc. | Neural stimulation for treatment of metabolic syndrome and type 2 diabetes |
| US8347891B2 (en) | 2002-04-08 | 2013-01-08 | Medtronic Ardian Luxembourg S.A.R.L. | Methods and apparatus for performing a non-continuous circumferential treatment of a body lumen |
| US7162303B2 (en) * | 2002-04-08 | 2007-01-09 | Ardian, Inc. | Renal nerve stimulation method and apparatus for treatment of patients |
| US7653438B2 (en) | 2002-04-08 | 2010-01-26 | Ardian, Inc. | Methods and apparatus for renal neuromodulation |
| US7860570B2 (en) | 2002-06-20 | 2010-12-28 | Boston Scientific Neuromodulation Corporation | Implantable microstimulators and methods for unidirectional propagation of action potentials |
| US7427280B2 (en) | 2002-09-06 | 2008-09-23 | Medtronic, Inc. | Method, system and device for treating disorders of the pelvic floor by delivering drugs to various nerves or tissues |
| IL152574A (en) | 2002-10-31 | 2009-09-22 | Transpharma Medical Ltd | A system for passing through the skin of dry items or dried medicines |
| US7112219B2 (en) | 2002-11-12 | 2006-09-26 | Myocor, Inc. | Devices and methods for heart valve treatment |
| US8814793B2 (en) | 2002-12-03 | 2014-08-26 | Neorad As | Respiration monitor |
| US7273479B2 (en) | 2003-01-15 | 2007-09-25 | Cryodynamics, Llc | Methods and systems for cryogenic cooling |
| US6984232B2 (en) | 2003-01-17 | 2006-01-10 | St. Jude Medical, Daig Division, Inc. | Ablation catheter assembly having a virtual electrode comprising portholes |
| US6960207B2 (en) | 2003-01-21 | 2005-11-01 | St Jude Medical, Daig Division, Inc. | Ablation catheter having a virtual electrode comprising portholes and a porous conductor |
| US7166088B2 (en) | 2003-01-27 | 2007-01-23 | Heuser Richard R | Catheter introducer system |
| US20050015132A1 (en) * | 2003-04-16 | 2005-01-20 | Itzhak Kronzon | Combined transesophageal echocardiography and transesophageal cardioversion probe |
| US7569626B2 (en) | 2003-06-05 | 2009-08-04 | Dfine, Inc. | Polymer composites for biomedical applications and methods of making |
| US7149574B2 (en) | 2003-06-09 | 2006-12-12 | Palo Alto Investors | Treatment of conditions through electrical modulation of the autonomic nervous system |
| US20150011834A1 (en) | 2003-07-31 | 2015-01-08 | Cook Medical Technologies Llc | System and method for introducing multiple medical devices |
| US7104989B2 (en) | 2003-09-05 | 2006-09-12 | Medtronic, Inc. | RF ablation catheter including a virtual electrode assembly |
| US7736362B2 (en) | 2003-09-15 | 2010-06-15 | Boston Scientific Scimed, Inc. | Catheter balloons |
| US7418292B2 (en) | 2003-10-01 | 2008-08-26 | Medtronic, Inc. | Device and method for attenuating an immune response |
| US20050075702A1 (en) | 2003-10-01 | 2005-04-07 | Medtronic, Inc. | Device and method for inhibiting release of pro-inflammatory mediator |
| US7970475B2 (en) | 2003-10-15 | 2011-06-28 | Rmx, Llc | Device and method for biasing lung volume |
| US7282050B2 (en) | 2003-10-31 | 2007-10-16 | Medtronic, Inc. | Ablation of exterior of stomach to treat obesity |
| US7282051B2 (en) | 2004-02-04 | 2007-10-16 | Boston Scientific Scimed, Inc. | Ablation probe for delivering fluid through porous structure |
| US20050245923A1 (en) | 2004-04-29 | 2005-11-03 | Medtronic, Inc. | Biopolar virtual electrode for transurethral needle ablation |
| WO2006007048A2 (en) | 2004-05-04 | 2006-01-19 | The Cleveland Clinic Foundation | Methods of treating medical conditions by neuromodulation of the sympathetic nervous system |
| US7330762B2 (en) | 2004-06-07 | 2008-02-12 | Neuro And Cardiac Technologies, Llc | Method and system for providing pulsed electrical stimulation to provide therapy for erectile/sexual dysfunction, prostatitis, prostatitis pain, and chronic pelvic pain |
| US7226447B2 (en) | 2004-06-23 | 2007-06-05 | Smith & Nephew, Inc. | Electrosurgical generator |
| US9387313B2 (en) | 2004-08-03 | 2016-07-12 | Interventional Spine, Inc. | Telescopic percutaneous tissue dilation systems and related methods |
| US7623924B2 (en) | 2004-08-31 | 2009-11-24 | Leptos Biomedical, Inc. | Devices and methods for gynecologic hormone modulation in mammals |
| EP1804902A4 (en) | 2004-09-10 | 2008-04-16 | Cleveland Clinic Foundation | INTRALUMINAL ELECTRODE ASSEMBLY |
| CN101600471B (zh) * | 2004-10-05 | 2012-11-07 | 阿迪安公司 | 肾神经调节的方法和装置 |
| US8676326B1 (en) | 2004-10-21 | 2014-03-18 | Pacesetter, Inc | Implantable device with responsive vascular and cardiac controllers |
| US8066702B2 (en) | 2005-01-11 | 2011-11-29 | Rittman Iii William J | Combination electrical stimulating and infusion medical device and method |
| US7918795B2 (en) | 2005-02-02 | 2011-04-05 | Gynesonics, Inc. | Method and device for uterine fibroid treatment |
| US20060200121A1 (en) | 2005-03-03 | 2006-09-07 | Mowery Thomas M | Navigable, multi-positional and variable tissue ablation apparatus and methods |
| US20060224118A1 (en) | 2005-03-31 | 2006-10-05 | Morris Mary M | Medical fluid delivery system |
| JP4958896B2 (ja) | 2005-04-21 | 2012-06-20 | アスマティックス,インコーポレイテッド | エネルギー送出のための制御方法および装置 |
| WO2007005976A1 (en) | 2005-07-01 | 2007-01-11 | Hansen Medical, Inc. | Robotic catheter system |
| TW200800223A (en) | 2005-12-21 | 2008-01-01 | Shire Pharmaceuticals Inc | Transdermal delivery of meptazinol |
| US20090036794A1 (en) | 2005-12-29 | 2009-02-05 | Rikshospitalet-Radiumhospitalet Hf | Method and apparatus for determining local tissue impedance for positioning of a needle |
| EP1973596A4 (en) | 2006-01-09 | 2010-01-20 | Windcrest Llc | APPARATUS FOR CONTROLLING VASCULAR GUIDING WIRE |
| US7711430B2 (en) | 2006-02-10 | 2010-05-04 | Electrocore Llc | Methods and apparatus for treating anaphylaxis using electrical modulation |
| BRPI0709844A2 (pt) | 2006-03-29 | 2011-07-26 | Catholic Healthcare West | estimulaÇço elÉtrica por microrrajadas dos nervos cranianos para o tratamento de condiÇÕes mÉdicas |
| US8007496B2 (en) | 2006-05-26 | 2011-08-30 | Boston Scientific Scimed, Inc. | Method of therapeutically treating tissue while preventing perfusion/ventilation of the tissue |
| US8114071B2 (en) | 2006-05-30 | 2012-02-14 | Arthrocare Corporation | Hard tissue ablation system |
| US8295926B2 (en) | 2006-06-02 | 2012-10-23 | Advanced Neuromodulation Systems, Inc. | Dynamic nerve stimulation in combination with other eating disorder treatment modalities |
| PL2037840T3 (pl) | 2006-06-28 | 2012-09-28 | Medtronic Ardian Luxembourg | Systemy do termicznie indukowanej neuromodulacji nerek |
| US8556888B2 (en) * | 2006-08-04 | 2013-10-15 | INTIO, Inc. | Methods and apparatuses for performing and monitoring thermal ablation |
| US20080114335A1 (en) | 2006-08-23 | 2008-05-15 | William Flickinger | Medical Device Guide |
| CA2749074A1 (en) | 2006-09-01 | 2008-05-29 | Usv Limited | Process for the preparation of sevelamer hydrochloride and formulation thereof |
| US8636715B2 (en) | 2006-09-25 | 2014-01-28 | Medtronic Vascular, Inc. | High torque, low profile catheters and methods for transluminal interventions |
| JP5312337B2 (ja) * | 2006-10-18 | 2013-10-09 | べシックス・バスキュラー・インコーポレイテッド | 標的組織の選択的な処置のための調節されたrfエネルギーおよび電気的な組織の特徴付け |
| WO2008070189A2 (en) | 2006-12-06 | 2008-06-12 | The Cleveland Clinic Foundation | Method and system for treating acute heart failure by neuromodulation |
| US8979837B2 (en) | 2007-04-04 | 2015-03-17 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Flexible tip catheter with extended fluid lumen |
| US11395694B2 (en) | 2009-05-07 | 2022-07-26 | St. Jude Medical, Llc | Irrigated ablation catheter with multiple segmented ablation electrodes |
| US10220187B2 (en) | 2010-06-16 | 2019-03-05 | St. Jude Medical, Llc | Ablation catheter having flexible tip with multiple flexible electrode segments |
| US8831716B2 (en) | 2007-09-11 | 2014-09-09 | Cardiac Pacemakers, Inc. | Histogram-based thoracic impedance monitoring |
| US8676362B2 (en) | 2007-09-11 | 2014-03-18 | Intel Corporation | Encapsulation of high definition audio data over an input/output interconnect |
| US8155744B2 (en) * | 2007-12-13 | 2012-04-10 | The Cleveland Clinic Foundation | Neuromodulatory methods for treating pulmonary disorders |
| EP2222374B1 (en) | 2007-12-21 | 2012-06-20 | Elekta AB (PUBL) | Apparatus for respiration state gated brachytherapy |
| US9199075B1 (en) | 2008-02-07 | 2015-12-01 | Respicardia, Inc. | Transvascular medical lead |
| US9245182B2 (en) | 2008-03-28 | 2016-01-26 | International Business Machines Corporation | Enhancing data in a screenshot |
| EP2662116B1 (en) * | 2008-05-09 | 2022-09-21 | Nuvaira, Inc. | Systems and assemblies for treating a bronchial tree |
| US8414508B2 (en) | 2008-10-30 | 2013-04-09 | Vytronus, Inc. | System and method for delivery of energy to tissue while compensating for collateral tissue |
| US20150105659A1 (en) | 2008-11-11 | 2015-04-16 | Covidien Lp | Energy delivery device and methods of use |
| US8611496B2 (en) | 2008-11-12 | 2013-12-17 | University Of Tsukuba | Radiation treatment system |
| CN102271603A (zh) | 2008-11-17 | 2011-12-07 | 明诺医学股份有限公司 | 得知或未得知组织形态的选择性能量积累 |
| US20100168820A1 (en) | 2008-12-02 | 2010-07-01 | Leptos Biomedical Inc. | Automatic threshold assesment utilizing patient feedback |
| US8465479B2 (en) | 2009-01-09 | 2013-06-18 | Ncontact Surgical, Inc. | Method and devices for performing biatrial coagulation |
| WO2010085456A1 (en) | 2009-01-20 | 2010-07-29 | Guided Delivery Systems Inc. | Anchor deployment devices and related methods |
| US8994536B2 (en) | 2009-02-25 | 2015-03-31 | Xanthia Global Limited | Wireless physiology monitor |
| US20100241113A1 (en) | 2009-03-20 | 2010-09-23 | Boston Scientific Scimed, Inc. | Protecting the phrenic nerve while ablating cardiac tissue |
| US20100249702A1 (en) | 2009-03-24 | 2010-09-30 | Abbott Cardiovascular Systems Inc. | Porous catheter balloon and method of making same |
| US9002427B2 (en) | 2009-03-30 | 2015-04-07 | Lifewave Biomedical, Inc. | Apparatus and method for continuous noninvasive measurement of respiratory function and events |
| US8321030B2 (en) | 2009-04-20 | 2012-11-27 | Advanced Neuromodulation Systems, Inc. | Esophageal activity modulated obesity therapy |
| RU2011142447A (ru) | 2009-04-22 | 2013-05-27 | Меркатор МедСистемс, Инк. | Применение гуанетидина для лечения гипертензии посредством локальной сосудистой доставки |
| US8340772B2 (en) | 2009-05-08 | 2012-12-25 | Advanced Neuromodulation Systems, Inc. | Brown adipose tissue utilization through neuromodulation |
| US20100305664A1 (en) | 2009-06-01 | 2010-12-02 | Wingeier Brett M | Methods and Devices for Adrenal Stimulation |
| JP5567131B2 (ja) | 2009-07-27 | 2014-08-06 | カーディアック ペースメイカーズ, インコーポレイテッド | 血液量再配分によって心不全を治療するための医療用デバイス |
| US20110028962A1 (en) | 2009-07-31 | 2011-02-03 | Randell Werneth | Adjustable pulmonary vein ablation catheter |
| US8617228B2 (en) | 2009-10-23 | 2013-12-31 | Medtronic Cryocath Lp | Method and system for preventing nerve injury during a medical procedure |
| CN112089394A (zh) | 2009-10-27 | 2020-12-18 | 努瓦拉公司 | 具有可冷却的能量发射组件的递送装置 |
| EP2493569B1 (en) | 2009-10-30 | 2015-09-30 | ReCor Medical, Inc. | Apparatus for treatment of hypertension through percutaneous ultrasound renal denervation |
| WO2011060200A1 (en) | 2009-11-11 | 2011-05-19 | Innovative Pulmonary Solutions, Inc. | Systems, apparatuses, and methods for treating tissue and controlling stenosis |
| US8911439B2 (en) | 2009-11-11 | 2014-12-16 | Holaira, Inc. | Non-invasive and minimally invasive denervation methods and systems for performing the same |
| US8920415B2 (en) | 2009-12-16 | 2014-12-30 | Biosense Webster (Israel) Ltd. | Catheter with helical electrode |
| WO2011078676A1 (en) | 2009-12-23 | 2011-06-30 | Hitops Gmbh | New use of pulsed radio frequency |
| US8818508B2 (en) | 2010-03-12 | 2014-08-26 | Medtronic, Inc. | Dosing vagal nerve stimulation therapy in synchronization with transient effects |
| CA2746948C (en) | 2010-07-21 | 2019-01-15 | Diros Technology Inc. | Advanced multi-purpose catheter probes for diagnostic and therapeutic procedures |
| US9408661B2 (en) * | 2010-07-30 | 2016-08-09 | Patrick A. Haverkost | RF electrodes on multiple flexible wires for renal nerve ablation |
| JP2012030010A (ja) | 2010-08-03 | 2012-02-16 | Terumo Corp | 穿刺針およびその製造方法 |
| WO2012019156A1 (en) | 2010-08-05 | 2012-02-09 | Medtronic Ardian Luxembourg S.A.R.L. | Cryoablation apparatuses, systems, and methods for renal neuromodulation |
| US20120065554A1 (en) | 2010-09-09 | 2012-03-15 | Michael Pikus | Dual Balloon Ablation Catheter with Vessel Deformation Arrangement for Renal Nerve Ablation |
| US20120065506A1 (en) | 2010-09-10 | 2012-03-15 | Scott Smith | Mechanical, Electromechanical, and/or Elastographic Assessment for Renal Nerve Ablation |
| TWI556849B (zh) | 2010-10-21 | 2016-11-11 | 美敦力阿福盧森堡公司 | 用於腎臟神經協調的導管裝置 |
| CN103313671B (zh) | 2010-10-25 | 2017-06-06 | 美敦力Af卢森堡有限责任公司 | 用于神经调节治疗的估算及反馈的装置、系统及方法 |
| EP2632378B1 (en) | 2010-10-25 | 2018-10-17 | Medtronic Ardian Luxembourg S.à.r.l. | Catheter apparatuses having multi-electrode arrays for renal neuromodulation and associated systems |
| US20120116354A1 (en) | 2010-11-08 | 2012-05-10 | Heuser Richard R | Devices and methods for small vessel access |
| US8473051B1 (en) | 2010-12-29 | 2013-06-25 | Cardialen, Inc. | Low-energy atrial cardioversion therapy with controllable pulse-shaped waveforms |
| US20130226201A1 (en) | 2011-01-11 | 2013-08-29 | Amsel Medical Corporation | Method and apparatus for occluding a blood vessel |
| US20140058294A1 (en) | 2011-03-04 | 2014-02-27 | Rainbow Medical Ltd. | Tissue treatment and monitoring by application of energy |
| US20140012251A1 (en) | 2011-03-07 | 2014-01-09 | Tidal Wave Technology, Inc. | Ablation devices and methods |
| CN102670264B (zh) * | 2011-03-15 | 2015-05-13 | 迈克尔·格特纳 | 神经的能量调节 |
| US9271678B2 (en) | 2011-04-08 | 2016-03-01 | Siemens Aktiengesellschaft | Constrained registration for motion compensation in atrial fibrillation ablation procedures |
| US8909316B2 (en) | 2011-05-18 | 2014-12-09 | St. Jude Medical, Cardiology Division, Inc. | Apparatus and method of assessing transvascular denervation |
| US20130035682A1 (en) | 2011-08-02 | 2013-02-07 | Sirius Medicine, Llc | Noninvasive Nerve Ablation |
| JP2014524305A (ja) | 2011-08-18 | 2014-09-22 | スペクトラ メディカル デバイスィズ,インク. | 高周波ニードルのためのイントロデューサ |
| US9278196B2 (en) | 2011-08-24 | 2016-03-08 | Ablative Solutions, Inc. | Expandable catheter system for vessel wall injection and muscle and nerve fiber ablation |
| US8702619B2 (en) | 2011-08-26 | 2014-04-22 | Symap Holding Limited | Mapping sympathetic nerve distribution for renal ablation and catheters for same |
| AU2012303696B2 (en) | 2011-08-26 | 2014-05-29 | Symap Medical (Suzhou), Ltd | System and method for locating and identifying functional nerves innervating wall of arteries |
| CN202637103U (zh) * | 2011-08-26 | 2013-01-02 | 王捷 | 具有肾神经标测功能的导管 |
| US9125668B2 (en) | 2011-09-14 | 2015-09-08 | Boston Scientific Scimed Inc. | Ablation device with multiple ablation modes |
| EP2755588B1 (en) | 2011-09-14 | 2016-05-18 | Boston Scientific Scimed, Inc. | Ablation device with ionically conductive balloon |
| WO2013055537A1 (en) * | 2011-10-11 | 2013-04-18 | Boston Scientific Scimed, Inc. | Ablation catheter with insulated tip |
| US20130096550A1 (en) * | 2011-10-18 | 2013-04-18 | Boston Scientific Scimed, Inc. | Ablative catheter with electrode cooling and related methods of use |
| US9629675B2 (en) | 2011-10-19 | 2017-04-25 | Confluent Medical Technologies, Inc. | Tissue treatment device and related methods |
| AU2012347470B2 (en) | 2011-12-09 | 2017-02-02 | Medtronic Ireland Manufacturing Unlimited Company | Therapeutic neuromodulation of the hepatic system |
| CN104066395B (zh) * | 2011-12-15 | 2017-09-05 | 里兰斯坦福初级大学理事会 | 用于治疗肺动脉高血压的设备和方法 |
| US9037259B2 (en) | 2011-12-23 | 2015-05-19 | Vessix Vascular, Inc. | Methods and apparatuses for remodeling tissue of or adjacent to a body passage |
| WO2013119547A1 (en) | 2012-02-09 | 2013-08-15 | Therix Medical Development, Ltd. | Occlusion access system |
| EP2822648A2 (en) | 2012-03-07 | 2015-01-14 | Enteromedics Inc. | Devices for regulation of blood pressure and heart rate |
| US9439598B2 (en) | 2012-04-12 | 2016-09-13 | NeuroMedic, Inc. | Mapping and ablation of nerves within arteries and tissues |
| US9113929B2 (en) | 2012-04-19 | 2015-08-25 | St. Jude Medical, Cardiology Division, Inc. | Non-electric field renal denervation electrode |
| CN104519817B (zh) | 2012-04-24 | 2017-11-10 | 西比姆公司 | 用于颈动脉体摘除的血管内导管和方法 |
| US20130289369A1 (en) | 2012-04-27 | 2013-10-31 | Volcano Corporation | Methods and Apparatus for Renal Neuromodulation |
| US20130296836A1 (en) | 2012-05-02 | 2013-11-07 | Enigma Medical, Inc. | System and method of pre-aortic ganglion ablation |
| US20130331813A1 (en) | 2012-05-02 | 2013-12-12 | Enigma Medical, Inc. | System and method of trans-abdominal pre-aortic ganglion ablation |
| US9439722B2 (en) * | 2012-05-09 | 2016-09-13 | Biosense Webster (Israel) Ltd. | Ablation targeting nerves in or near the inferior vena cava and/or abdominal aorta for treatment of hypertension |
| EP2866669A4 (en) | 2012-06-30 | 2016-04-20 | Cibiem Inc | ABLATION OF CAROTID BODY VIA DIRECTED ENERGY |
| EP2874555A1 (en) | 2012-07-17 | 2015-05-27 | Boston Scientific Scimed, Inc. | Renal nerve modulation catheter design |
| WO2014021926A1 (en) | 2012-07-31 | 2014-02-06 | Abhi Vase | System and method for autonimic blood pressure regulation |
| CN104540465A (zh) | 2012-08-24 | 2015-04-22 | 波士顿科学西美德公司 | 带有含单独微孔隙区域的球囊的血管内导管 |
| US20140088588A1 (en) | 2012-09-26 | 2014-03-27 | Boston Scientific Scimed, Inc. | Systems and methods for controlling energy application |
| CN104812325A (zh) | 2012-09-26 | 2015-07-29 | 波士顿科学国际有限公司 | 用于肾神经消融支持多个电极的具有肋脊结构的导管 |
| US8740849B1 (en) | 2012-10-29 | 2014-06-03 | Ablative Solutions, Inc. | Peri-vascular tissue ablation catheter with support structures |
| US9301795B2 (en) | 2012-10-29 | 2016-04-05 | Ablative Solutions, Inc. | Transvascular catheter for extravascular delivery |
| US10004557B2 (en) | 2012-11-05 | 2018-06-26 | Pythagoras Medical Ltd. | Controlled tissue ablation |
| WO2014097300A1 (en) | 2012-12-20 | 2014-06-26 | Shlomo Ben-Haim | Multi point treatment probes and methods of using thereof |
| US9615878B2 (en) | 2012-12-21 | 2017-04-11 | Volcano Corporation | Device, system, and method for imaging and tissue characterization of ablated tissue |
| US9050010B2 (en) | 2012-12-31 | 2015-06-09 | Biosense Webster (Israel) Ltd. | Double loop lasso with single puller wire for bi-directional actuation |
| CN108159564A (zh) | 2013-01-28 | 2018-06-15 | 重塑生命科学股份有限公司 | 把疗法施加于患者靶神经的系统 |
| JP6453769B2 (ja) * | 2013-02-07 | 2019-01-16 | 上▲海▼魅▲麗▼▲緯▼叶医▲療▼科技有限公司 | 高周波焼灼方法、システム及び高周波焼灼設備 |
| US20140303617A1 (en) | 2013-03-05 | 2014-10-09 | Neuro Ablation, Inc. | Intravascular nerve ablation devices & methods |
| WO2014143571A1 (en) * | 2013-03-11 | 2014-09-18 | Boston Scientific Scimed, Inc. | Medical devices for modulating nerves |
| WO2014150887A1 (en) | 2013-03-15 | 2014-09-25 | Cibiem, Inc. | Endovascular catheters for carotid body ablation utilizing an ionic liquid stream |
| US9179973B2 (en) | 2013-03-15 | 2015-11-10 | St. Jude Medical, Cardiology Division, Inc. | Feedback systems and methods for renal denervation utilizing balloon catheter |
| WO2014150595A1 (en) | 2013-03-15 | 2014-09-25 | Medtronic Ardian Luxembourg S.A.R.L. | Direct heat ablation catheter |
| US9179974B2 (en) | 2013-03-15 | 2015-11-10 | Medtronic Ardian Luxembourg S.A.R.L. | Helical push wire electrode |
| WO2014189887A2 (en) | 2013-05-20 | 2014-11-27 | Mayo Foundation For Medical Education And Research | Devices and methods for ablation of tissue |
| EP3003191A4 (en) * | 2013-06-05 | 2017-02-08 | Metavention, Inc. | Modulation of targeted nerve fibers |
| US9895539B1 (en) | 2013-06-10 | 2018-02-20 | Nevro Corp. | Methods and systems for disease treatment using electrical stimulation |
| JP2015002920A (ja) | 2013-06-21 | 2015-01-08 | 株式会社パイオラックスメディカルデバイス | ガイドワイヤ挿入装置 |
| WO2015021304A2 (en) * | 2013-08-07 | 2015-02-12 | Cibiem, Inc. | Carotid body ablation via directed energy |
| WO2015022668A2 (en) | 2013-08-14 | 2015-02-19 | La Vita Technologies Ltd. | Methods and apparatuses for treating auto-immune diseases by ablative neuromodulation |
| US11446524B2 (en) | 2013-09-12 | 2022-09-20 | Nuvaira Inc. | Systems, devices, and methods for treating a pulmonary disease with ultrasound energy |
| US9931046B2 (en) | 2013-10-25 | 2018-04-03 | Ablative Solutions, Inc. | Intravascular catheter with peri-vascular nerve activity sensors |
| RU2016121165A (ru) | 2013-11-19 | 2017-12-25 | Этикон, Инк. | Торакоскопические способы лечения заболевания бронхов |
| WO2015079448A1 (en) | 2013-12-01 | 2015-06-04 | Cardiologic Innovations Ltd | A patient monitoring system |
| JP2015119830A (ja) | 2013-12-24 | 2015-07-02 | テルモ株式会社 | ガイディングカテーテルおよびアブレーションカテーテル |
| EP2907464A1 (en) | 2014-02-12 | 2015-08-19 | Perseus-Biomed Inc. | Methods and systems for treating nerve structures |
| EP2946728A1 (en) | 2014-05-20 | 2015-11-25 | SLE Limited | Electrode array with perforated backing |
| US10791924B2 (en) | 2014-08-10 | 2020-10-06 | Autonomix Medical, Inc. | ANS assessment systems, kits, and methods |
| CN104257426B (zh) | 2014-09-02 | 2017-09-05 | 远见企业有限公司 | 一种带密封阀的肾动脉去交感神经冷盐水射频消融导管 |
| US10383683B2 (en) | 2014-10-20 | 2019-08-20 | Asahi Medical Technologies, Inc. | Redirecting delivery catheter and methods of use thereof |
| WO2016084081A2 (en) | 2014-11-26 | 2016-06-02 | Sonievie Ltd. | Devices and methods for pulmonary hypertension treatment |
| EP3226795B1 (en) | 2014-12-03 | 2020-08-26 | Metavention, Inc. | Systems for modulating nerves or other tissue |
| DE102014018107B4 (de) | 2014-12-09 | 2022-03-10 | Drägerwerk AG & Co. KGaA | Vorrichtung zur Verarbeitung von tomografischen Daten zur Darstellung eines Therapieverlaufs |
| US10376308B2 (en) | 2015-02-05 | 2019-08-13 | Axon Therapies, Inc. | Devices and methods for treatment of heart failure by splanchnic nerve ablation |
| WO2016132340A1 (en) | 2015-02-22 | 2016-08-25 | Renal Dynamics Ltd. | Flexible treatment catheter |
| EP3288626A4 (en) | 2015-04-27 | 2019-01-23 | Reflex Medical Inc. | SYSTEMS AND METHODS FOR SYMPATHETIC CARDIO-PULMONARY NEUROMODULATION |
| US20170035990A1 (en) | 2015-08-04 | 2017-02-09 | Kevin Swift | Endoluminal fluid delivery device and method |
| US20170049989A1 (en) | 2015-08-18 | 2017-02-23 | Leonardo Kapural | Methods and kits for treating dysmotility |
| US10207110B1 (en) | 2015-10-13 | 2019-02-19 | Axon Therapies, Inc. | Devices and methods for treatment of heart failure via electrical modulation of a splanchnic nerve |
| WO2017074920A1 (en) | 2015-10-27 | 2017-05-04 | Mayo Foundation For Medical Education And Research | Devices and methods for ablation of tissue |
| CA3006451A1 (en) | 2015-12-03 | 2017-06-08 | University Of Pittsburgh-Of The Commonwealth System Of Higher Education | Device and method for nerve block by local cooling to room temperature |
| US20170202614A1 (en) | 2016-01-20 | 2017-07-20 | Rainbow Medical Ltd. | Catheter guidance and procedure planning |
| US11534610B2 (en) | 2016-02-02 | 2022-12-27 | Reshape Lifesciences Inc. | High-frequency low duty cycle patterns for neural regulation |
| US20170252101A1 (en) | 2016-03-04 | 2017-09-07 | St. Jude Medical, Cardiology Division, Inc. | Systems and methods for intraprocedural evaluation of renal denervation |
| EP3490442A4 (en) | 2016-07-29 | 2020-03-25 | Axon Therapies, Inc. | DEVICES, SYSTEMS AND METHODS FOR THE TREATMENT OF HEART FAILURE BY ABLATION OF SPLANCHNIC NERVE |
| US9743984B1 (en) | 2016-08-11 | 2017-08-29 | Thermedical, Inc. | Devices and methods for delivering fluid to tissue during ablation therapy |
| US10751543B2 (en) | 2016-12-22 | 2020-08-25 | Cardiac Pacemakers, Inc. | Azygos, internal thoracic, and/or intercostal vein implantation and use of medical devices |
| WO2018125822A2 (en) | 2016-12-28 | 2018-07-05 | Coridea, Llc | Apparatus to treat cardiopulmonary disease |
| US10561461B2 (en) | 2017-12-17 | 2020-02-18 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| US11751939B2 (en) | 2018-01-26 | 2023-09-12 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
| US11413090B2 (en) | 2020-01-17 | 2022-08-16 | Axon Therapies, Inc. | Methods and devices for endovascular ablation of a splanchnic nerve |
-
2017
- 2017-07-31 EP EP17835432.0A patent/EP3490442A4/en active Pending
- 2017-07-31 AU AU2017301911A patent/AU2017301911B2/en active Active
- 2017-07-31 CA CA3031766A patent/CA3031766A1/en active Pending
- 2017-07-31 US US16/318,447 patent/US11154354B2/en active Active
- 2017-07-31 CN CN201780059625.7A patent/CN109843160B/zh active Active
- 2017-07-31 WO PCT/US2017/044747 patent/WO2018023132A1/en unknown
- 2017-07-31 CN CN202210441796.9A patent/CN114711957A/zh active Pending
- 2017-07-31 JP JP2019526210A patent/JP7217230B2/ja active Active
-
2021
- 2021-10-26 US US17/452,305 patent/US11801092B2/en active Active
-
2022
- 2022-10-27 AU AU2022259789A patent/AU2022259789A1/en active Pending
-
2023
- 2023-01-23 JP JP2023007759A patent/JP2023040300A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008510530A (ja) | 2004-08-25 | 2008-04-10 | バイリス メディカル カンパニー インコーポレイテッド | 医療用プローブアセンブリ及びエネルギー伝達システム |
| JP2009500052A (ja) | 2005-06-20 | 2009-01-08 | アブレーション フロンティアズ,インコーポレーテッド | アブレーションカテーテル |
| US20120265198A1 (en) | 2010-11-19 | 2012-10-18 | Crow Loren M | Renal nerve detection and ablation apparatus and method |
| US20120289369A1 (en) | 2011-05-14 | 2012-11-15 | Fogarty Shaun P | Launchable flying device |
Also Published As
| Publication number | Publication date |
|---|---|
| US11801092B2 (en) | 2023-10-31 |
| WO2018023132A8 (en) | 2018-09-13 |
| EP3490442A4 (en) | 2020-03-25 |
| US20220257315A1 (en) | 2022-08-18 |
| US20200179045A1 (en) | 2020-06-11 |
| JP2019527121A (ja) | 2019-09-26 |
| CN109843160A (zh) | 2019-06-04 |
| CN114711957A (zh) | 2022-07-08 |
| JP2023040300A (ja) | 2023-03-22 |
| CA3031766A1 (en) | 2018-02-01 |
| AU2017301911A1 (en) | 2019-02-07 |
| EP3490442A1 (en) | 2019-06-05 |
| AU2022259789A1 (en) | 2022-12-15 |
| AU2017301911B2 (en) | 2022-07-28 |
| CN109843160B (zh) | 2022-04-15 |
| US11154354B2 (en) | 2021-10-26 |
| WO2018023132A1 (en) | 2018-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7217230B2 (ja) | 内臓神経アブレーションによる心不全の治療の為のデバイス、システム及び方法 | |
| US11844569B1 (en) | Methods and devices for endovascular ablation of a splanchnic nerve | |
| US11864826B2 (en) | Devices and methods for treatment of heart failure by splanchnic nerve ablation | |
| EP3902494B1 (en) | Devices for endovascular ablation of a splanchnic nerve | |
| WO2014008489A1 (en) | Devices and systems for carotid body ablation | |
| US20220323142A1 (en) | Methods, systems and devices for endovascular electroporation of a greater splanchnic nerve | |
| WO2024200141A1 (en) | Focused ultrasound stimulation for renal denervation | |
| CA3162954A1 (en) | Methods and devices for endovascular ablation of a splanchnic nerve |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200731 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210622 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210915 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220426 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220721 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7217230 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |