JP7161976B2 - 作業車両用の自動走行システム - Google Patents
作業車両用の自動走行システム Download PDFInfo
- Publication number
- JP7161976B2 JP7161976B2 JP2019114955A JP2019114955A JP7161976B2 JP 7161976 B2 JP7161976 B2 JP 7161976B2 JP 2019114955 A JP2019114955 A JP 2019114955A JP 2019114955 A JP2019114955 A JP 2019114955A JP 7161976 B2 JP7161976 B2 JP 7161976B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- vehicle body
- vehicle
- control unit
- center
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 claims description 36
- 238000005507 spraying Methods 0.000 description 83
- 235000013399 edible fruits Nutrition 0.000 description 44
- 239000007921 spray Substances 0.000 description 43
- 238000000034 method Methods 0.000 description 39
- 230000008569 process Effects 0.000 description 36
- 238000012545 processing Methods 0.000 description 32
- 239000007788 liquid Substances 0.000 description 23
- 239000002420 orchard Substances 0.000 description 22
- 230000015654 memory Effects 0.000 description 19
- 238000012937 correction Methods 0.000 description 17
- 238000009434 installation Methods 0.000 description 16
- 239000000126 substance Substances 0.000 description 16
- 238000004891 communication Methods 0.000 description 14
- 238000001514 detection method Methods 0.000 description 14
- 238000010295 mobile communication Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 11
- 238000003860 storage Methods 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 6
- 241000220225 Malus Species 0.000 description 3
- 244000269722 Thea sinensis Species 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 239000002689 soil Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 235000009024 Ceanothus sanguineus Nutrition 0.000 description 2
- 240000003553 Leptospermum scoparium Species 0.000 description 2
- 235000015459 Lycium barbarum Nutrition 0.000 description 2
- 241000219094 Vitaceae Species 0.000 description 2
- 235000021016 apples Nutrition 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 235000021021 grapes Nutrition 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000007480 spreading Effects 0.000 description 2
- 235000013311 vegetables Nutrition 0.000 description 2
- 208000019300 CLIPPERS Diseases 0.000 description 1
- 244000025254 Cannabis sativa Species 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 240000008042 Zea mays Species 0.000 description 1
- 235000005824 Zea mays ssp. parviglumis Nutrition 0.000 description 1
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 208000021930 chronic lymphocytic inflammation with pontine perivascular enhancement responsive to steroids Diseases 0.000 description 1
- 235000005822 corn Nutrition 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000009333 weeding Methods 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/02—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
- G01S19/47—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement the supplementary measurement being an inertial measurement, e.g. tightly coupled inertial
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/027—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising intertial navigation means, e.g. azimuth detector
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D46/00—Picking of fruits, vegetables, hops, or the like; Devices for shaking trees or shrubs
- A01D46/04—Picking of fruits, vegetables, hops, or the like; Devices for shaking trees or shrubs of tea
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D46/00—Picking of fruits, vegetables, hops, or the like; Devices for shaking trees or shrubs
- A01D46/30—Robotic devices for individually picking crops
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01G—HORTICULTURE; CULTIVATION OF VEGETABLES, FLOWERS, RICE, FRUIT, VINES, HOPS OR SEAWEED; FORESTRY; WATERING
- A01G25/00—Watering gardens, fields, sports grounds or the like
- A01G25/09—Watering arrangements making use of movable installations on wheels or the like
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M7/00—Special adaptations or arrangements of liquid-spraying apparatus for purposes covered by this subclass
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
Description
作業車両の傾斜情報を取得する慣性計測装置と、前記作業車両を目標経路に従って自動走行させる自動走行制御部とを備え、
前記作業車両には、地面から離れて位置する作業対象部に対して所定の作業を行う作業装置が備えられており、
前記自動走行制御部は、前記作業装置における作業中心の高度情報と前記傾斜情報とに基づいてオフセット量を算出し、前記オフセット量に基づいて前記目標経路に対する前記作業車両の位置を制御する点にある。
前記作業装置には、前記作業対象部の通過を許容する空間が備えられるとともに、前記空間を通過する前記作業対象部に対して左右の側方から所定の作業を行う左右の作業部が備えられており、
前記自動走行制御部は、前記作業対象部が前記空間を通過する際に、当該作業対象部が前記左右の作業部に接触するのを抑制可能な前記オフセット量を算出する点にある。
前記作業車両には、前記高度情報が異なる複数の作業装置が備えられており、
前記自動走行制御部は、前記複数の作業装置の平均高度情報を前記高度情報として前記オフセット量を算出する点にある。
前記作業車両には、前記高度情報が異なる複数の作業装置が備えられており、
前記自動走行制御部は、前記複数の作業装置のうちの一つの前記高度情報に基づいて前記オフセット量を算出する点にある。
この構成により、前アンテナユニット15は、前側のボルト53などによる各支持プレート51との連結を解除した後、後側のボルト53などによる各支持プレート51との連結を緩めることで、図15に実線で示す車体上方の使用位置から図15に二点鎖線で示す車体前方の格納位置に位置変更することができる。
この構成により、後アンテナユニット16は、後側のボルト56などによる各支持プレート55との連結を解除した後、後側のボルト56などによる各支持プレート55との連結を緩めることで、車体上方の使用位置から車体後方の格納位置に位置変更することができる。
この構成により、左右の前照灯58は、それらの照明方向を上下方向と左右方向とに調整することができる。又、図15に示すように、前アンテナユニット15を図15に実線で示す使用位置から図15に二点鎖線で示す格納位置に位置変更させる場合には、左右の前照灯58を、前向きの使用位置から横外向きの退避位置に位置変更しておくことにより、前アンテナユニット15と左右の前照灯58との干渉を回避することができる。
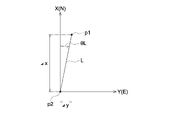
尚、この作業車両Vにおいては、前述したように、後GNSS受信機5Dが測定する後アンテナ位置p2を基準にして車体1の現在位置を算出していることから、後GNSSアンテナ5Bの設置位置(以下、後アンテナ設置位置と称する)を基準にした車体位置補正処理に関する自動走行制御部40の制御作動について説明する。
具体的には、自動走行制御部40は、
〔数式1〕

〔数式2〕

本発明の別実施形態について説明する。
尚、以下に説明する各別実施形態の構成は、それぞれ単独で適用することに限らず、他の別実施形態の構成と組み合わせて適用することも可能である。
4R 作業部(右側)
5E 慣性計測装置
40 自動走行制御部
P 目標経路
pw 作業中心
V 作業車両
W 作業装置
Za 作業対象部
Δp オフセット量
Claims (4)
- 作業車両の傾斜情報を取得する慣性計測装置と、前記作業車両を目標経路に従って自動走行させる自動走行制御部とを備え、
前記作業車両には、地面から離れて位置する作業対象部に対して所定の作業を行う作業装置が備えられており、
前記自動走行制御部は、前記作業装置における作業中心の高度情報と前記傾斜情報とに基づいてオフセット量を算出し、前記オフセット量に基づいて前記目標経路に対する前記作業車両の位置を制御する作業車両用の自動走行システム。 - 前記作業装置には、前記作業対象部の通過を許容する空間が備えられるとともに、前記空間を通過する前記作業対象部に対して左右の側方から所定の作業を行う左右の作業部が備えられており、
前記自動走行制御部は、前記作業対象部が前記空間を通過する際に、当該作業対象部が前記左右の作業部に接触するのを抑制可能な前記オフセット量を算出する請求項1に記載の作業車両用の自動走行システム。 - 前記作業車両には、前記高度情報が異なる複数の作業装置が備えられており、
前記自動走行制御部は、前記複数の作業装置の平均高度情報を前記高度情報として前記オフセット量を算出する請求項1又は2に記載の作業車両用の自動走行システム。 - 前記作業車両には、前記高度情報が異なる複数の作業装置が備えられており、
前記自動走行制御部は、前記複数の作業装置のうちの一つの前記高度情報に基づいて前記オフセット量を算出する請求項1又は2に記載の作業車両用の自動走行システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019114955A JP7161976B2 (ja) | 2019-06-20 | 2019-06-20 | 作業車両用の自動走行システム |
| EP20826035.6A EP3987898A4 (en) | 2019-06-20 | 2020-06-17 | AUTOMATED DRIVE SYSTEM FOR WORK VEHICLE |
| PCT/JP2020/023848 WO2020256033A1 (ja) | 2019-06-20 | 2020-06-17 | 作業車両用の自動走行システム |
| US17/620,699 US20220244731A1 (en) | 2019-06-20 | 2020-06-17 | Automated Driving System for Work Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019114955A JP7161976B2 (ja) | 2019-06-20 | 2019-06-20 | 作業車両用の自動走行システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021002171A JP2021002171A (ja) | 2021-01-07 |
| JP7161976B2 true JP7161976B2 (ja) | 2022-10-27 |
Family
ID=73995086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019114955A Active JP7161976B2 (ja) | 2019-06-20 | 2019-06-20 | 作業車両用の自動走行システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220244731A1 (ja) |
| EP (1) | EP3987898A4 (ja) |
| JP (1) | JP7161976B2 (ja) |
| WO (1) | WO2020256033A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022183965A (ja) * | 2021-05-31 | 2022-12-13 | ヤンマーホールディングス株式会社 | 作業機械 |
| JP2022183962A (ja) * | 2021-05-31 | 2022-12-13 | ヤンマーホールディングス株式会社 | 経路決定方法、経路決定システム、及び経路決定プログラム |
| CN114158351A (zh) * | 2021-11-30 | 2022-03-11 | 武冈市翰岭茶叶种植有限公司 | 一种茶叶自动采摘设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60188610U (ja) * | 1984-05-28 | 1985-12-13 | トヨタ自動車株式会社 | コンプライアンスステア抑制装置 |
| JPS6294726U (ja) * | 1985-12-06 | 1987-06-17 | ||
| JPH0229205U (ja) * | 1988-08-18 | 1990-02-26 | ||
| JPH0477906A (ja) * | 1990-07-20 | 1992-03-12 | Ishikawajima Shibaura Mach Co Ltd | 自動走行作業車の操向制御装置 |
| JP3359799B2 (ja) * | 1995-11-02 | 2002-12-24 | 株式会社日立製作所 | 無人移動作業機械の制御方式 |
| JP5790988B2 (ja) * | 2011-05-02 | 2015-10-07 | 株式会社新屋園芸 | 自走式防除機 |
| EP3125058A4 (en) * | 2014-03-28 | 2018-01-03 | Yanmar Co., Ltd. | Autonomously traveling work vehicle |
| JP6641191B2 (ja) * | 2016-02-23 | 2020-02-05 | ヤンマー株式会社 | 作業車両 |
| CN107198499B (zh) * | 2016-03-18 | 2021-03-05 | 松下电器(美国)知识产权公司 | 自主移动装置、自主移动方法以及自主移动系统 |
| JP6692692B2 (ja) | 2016-05-24 | 2020-05-13 | ヤンマー株式会社 | 自律走行経路生成システム |
| WO2018202634A1 (en) * | 2017-05-02 | 2018-11-08 | Agco International Gmbh | Guidance working depth compensation for implement |
| EP3729937B1 (en) * | 2017-12-19 | 2023-07-05 | Kubota Corporation | Autonomous travel work machine |
| US11277956B2 (en) * | 2018-07-26 | 2022-03-22 | Bear Flag Robotics, Inc. | Vehicle controllers for agricultural and industrial applications |
-
2019
- 2019-06-20 JP JP2019114955A patent/JP7161976B2/ja active Active
-
2020
- 2020-06-17 WO PCT/JP2020/023848 patent/WO2020256033A1/ja active Application Filing
- 2020-06-17 EP EP20826035.6A patent/EP3987898A4/en active Pending
- 2020-06-17 US US17/620,699 patent/US20220244731A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20220244731A1 (en) | 2022-08-04 |
| WO2020256033A1 (ja) | 2020-12-24 |
| JP2021002171A (ja) | 2021-01-07 |
| EP3987898A1 (en) | 2022-04-27 |
| EP3987898A4 (en) | 2023-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7139503B2 (ja) | 経路生成方法 | |
| JP7192060B2 (ja) | 自動走行方法 | |
| JP7161976B2 (ja) | 作業車両用の自動走行システム | |
| US10295998B2 (en) | Agricultural work vehicle | |
| US9148995B2 (en) | Spray boom height control system | |
| KR102140854B1 (ko) | 자율 주행 작업 차량의 주행 경로 설정 방법 | |
| KR102121646B1 (ko) | 포장 상태 검지 시스템 | |
| JP2016095660A (ja) | 無人作業システム | |
| JP2004008186A (ja) | 農業用作業車 | |
| JP7256080B2 (ja) | 作業車両 | |
| JP2004016010A (ja) | 農業用作業車 | |
| US20220382291A1 (en) | Route Generation Method, Route Generation Device, and Route Generation Program | |
| US20220382292A1 (en) | Route Determination Method, Route Determination System, And Route Determination Program | |
| EP4248725A1 (en) | Work machine control method, work machine control program, and work machine | |
| EP4104651A1 (en) | Automatic traveling method, automatic traveling system, and automatic traveling program | |
| CN115474590A (zh) | 喷洒机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20200814 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221017 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7161976 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |