JP7148511B2 - 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム - Google Patents
組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム Download PDFInfo
- Publication number
- JP7148511B2 JP7148511B2 JP2019524870A JP2019524870A JP7148511B2 JP 7148511 B2 JP7148511 B2 JP 7148511B2 JP 2019524870 A JP2019524870 A JP 2019524870A JP 2019524870 A JP2019524870 A JP 2019524870A JP 7148511 B2 JP7148511 B2 JP 7148511B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment
- needle
- probe
- tines
- real
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 76
- 238000002679 ablation Methods 0.000 title description 11
- 238000012544 monitoring process Methods 0.000 title description 3
- 230000008520 organization Effects 0.000 title 1
- 238000011282 treatment Methods 0.000 claims description 280
- 239000000523 sample Substances 0.000 claims description 168
- 238000002560 therapeutic procedure Methods 0.000 claims description 51
- 230000001225 therapeutic effect Effects 0.000 claims description 23
- 230000004044 response Effects 0.000 claims description 15
- 230000007246 mechanism Effects 0.000 claims description 12
- 238000003384 imaging method Methods 0.000 description 55
- 201000010260 leiomyoma Diseases 0.000 description 28
- 206010046798 Uterine leiomyoma Diseases 0.000 description 14
- 210000004291 uterus Anatomy 0.000 description 14
- 210000003484 anatomy Anatomy 0.000 description 12
- 230000000875 corresponding effect Effects 0.000 description 10
- 230000033001 locomotion Effects 0.000 description 8
- 238000002604 ultrasonography Methods 0.000 description 7
- 230000000007 visual effect Effects 0.000 description 6
- 230000001276 controlling effect Effects 0.000 description 5
- 210000000754 myometrium Anatomy 0.000 description 5
- 238000003825 pressing Methods 0.000 description 5
- 239000003814 drug Substances 0.000 description 4
- 239000003550 marker Substances 0.000 description 4
- 230000001105 regulatory effect Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000000315 cryotherapy Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 206010011878 Deafness Diseases 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 238000013473 artificial intelligence Methods 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000011443 conventional therapy Methods 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 2
- 229940079593 drug Drugs 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 230000001404 mediated effect Effects 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 229940124597 therapeutic agent Drugs 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 241001422033 Thestylus Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 231100000895 deafness Toxicity 0.000 description 1
- 210000004696 endometrium Anatomy 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 208000016354 hearing loss disease Diseases 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000000968 medical method and process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002632 myometrial effect Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/1815—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/02—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/042—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating using additional gas becoming plasma
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00184—Moving parts
- A61B2018/00202—Moving parts rotating
- A61B2018/00208—Moving parts rotating actively driven, e.g. by a motor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00559—Female reproductive organs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00898—Alarms or notifications created in response to an abnormal condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00904—Automatic detection of target tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00982—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combined with or comprising means for visual or photographic inspections inside the body, e.g. endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1425—Needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1475—Electrodes retractable in or deployable from a housing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/363—Use of fiducial points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Plasma & Fusion (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Robotics (AREA)
- Gynecology & Obstetrics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Human Computer Interaction (AREA)
- Biophysics (AREA)
- Surgical Instruments (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
本願は、米国仮出願第62/421,669号(2017年11月14日出願)の利益を主張し、上記出願は、参照により本明細書に組み込まれる。
なし
本発明は、概して、医療方法および装置に関する。より具体的には、本発明は、治療される組織の画像上に投影された治療および安全境界を使用して、針の展開を制御する方法およびシステムに関する。
本発明は、例えば、以下を提供する。
(項目1)
治療構造を組織内で展開する方法であって、前記方法は、
治療されるべき解剖学的特徴を含む前記組織のリアルタイム画像をコントローラに接続されたディスプレイ上に提供することと、
プローブが前記解剖学的特徴の近傍に位置付けられているとき、展開可能治療構造を有する前記プローブを表示することと、
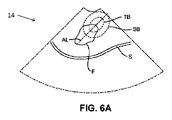
治療領域または安全領域のうちの少なくとも1つを前記リアルタイム画像上に投影することと、
前記リアルタイム画像上の前記治療領域および/または安全領域の前記投影された画像の投影された境界のサイズまたは位置のうちの少なくとも1つを調節することであって、前記投影された境界のサイズおよび/または位置を調節することは、前記プローブのハンドル上の第1のユーザインターフェースのユーザ調節を含む、ことと、
前記治療構造が前記プローブから展開されているとき、前記展開可能治療構造を前記リアルタイム画像上に表示することと
を含み、
前記治療構造は、前記投影された境界が調節された後、前記投影された境界内で治療を提供するために前記プローブおよび前記組織に対して位置付けられ、
前記プローブは、前記組織内の前記解剖学的特徴の近傍に位置付けられ、前記治療構造は、前記プローブのハンドル上の第2のユーザインターフェースのユーザ動作によって、前記プローブから展開され、前記第2のユーザインターフェースを調節することによる前記プローブからの前記治療構造の展開は、前記投影された境界の前記サイズおよび/または位置を調節するための前記第1のユーザインターフェースの前記調節から独立している、方法。
(項目2)
治療を提供するために前記治療構造が前記プローブおよび前記組織に対して位置付けられた後、前記投影された境界のサイズまたは前記位置のうちの少なくとも1つを再調節することをさらに含む、項目1に記載の方法。
(項目3)
前記投影された境界の位置は、前記プローブを前記解剖学的特徴に対して手動で再位置付けすることによって調節される、項目1に記載の方法。
(項目4)
前記プローブの前記ハンドルの前記第1のユーザインターフェースは、ジョイスティックまたは指向性パッドを備えている、項目1に記載の方法。
(項目5)
前記投影された境界の前記サイズおよび/または位置を調節することは、前記投影された境界の前記サイズを調節することを含み、前記投影された境界の前記サイズは、前記ジョイスティックまたは指向性パッドが第1の方向に押され、前記投影された境界を拡大すること、または、前記ジョイスティックまたは指向性パッドが前記第1の方向と反対の第2の方向に押され、前記投影された境界を縮小することのうちの1つ以上によって調節される、項目4に記載の方法。
(項目6)
前記ジョイスティックまたは指向性パッドは、前記投影された境界の前記サイズおよび/または位置が調節されているとき、前記プローブの前記ハンドルに対して静止したままである、項目5に記載の方法。
(項目7)
前記投影された境界の前記サイズおよび/または位置を調節することは、前記投影された境界の前記位置を調節することを含み、前記投影された境界の前記位置は、前記ジョイスティックまたは指向性パッドが第3の方向に押され、前記投影された境界を前進させること、または、前記ジョイスティックまたは指向性パッドが前記第3の方向と反対の第4の方向に押され、前記投影された境界を後退させることのうちの1つ以上によって調節される、項目4に記載の方法。
(項目8)
前記ジョイスティックまたは指向性パッドは、前記投影された境界の前記サイズおよび/または位置が調節されているとき、前記プローブのハンドルに対して静止したままである、項目7に記載の方法。
(項目9)
前記プローブの前記ハンドル上の前記第2のユーザインターフェースは、前記治療構造に結合された1つ以上のスライダ機構を備えている、項目1に記載の方法。
(項目10)
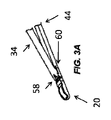
前記治療構造は、針構造を備えている、項目1に記載の方法。
(項目11)
前記治療プローブは、前記針構造から前進可能な複数のタインをさらに備え、前記方法は、前記複数のタインが展開されているとき、前記複数のタインのリアルタイム位置を検出することと、前記検出されたリアルタイム位置に応答して、前記複数のタインの仮想表現を前記リアルタイム画像上に表示することとをさらに含む、項目10に記載の方法。
(項目12)
前記治療領域または前記安全領域のうちの前記少なくとも1つを前記リアルタイム画像上に投影することは、前記複数のタインのための1つ以上のタイン停止インジケータを前記リアルタイム画像上に投影することを含む、項目11に記載の方法。
(項目13)
前記複数のタインの前記仮想表現が前記タイン停止インジケータと出会うように、前記複数のタインを前進させることをさらに含む、項目12に記載の方法。
(項目14)
前記複数のタインが、前記複数のタインの前記仮想表現が前記タイン停止インジケータと出会うように前進させられた後、前記ハンドルの前記第1のユーザインターフェースを調節し、前記タイン停止インジケータの位置を調節することをさらに含む、項目13に記載の方法。
(項目15)
前記複数のタインのための前記1つ以上の停止位置は、治療されるべき解剖学的特徴内にあるように構成されている、項目12に記載の方法。
(項目16)
前記治療プローブのサーボモータを駆動し、前記複数のタインを展開することをさらに含む、項目11に記載の方法。
(項目17)
前記複数のタインを前記リアルタイム画像上に表示することは、前記複数のタインのリアルタイム位置を検出することと、前記検出されたリアルタイム位置に応答して、前記複数のタインの仮想表現を表示することとを含む、項目11に記載の方法。
(項目18)
前記複数のタインの前記仮想表現の位置をリアルタイムで更新することをさらに含む、項目17に記載の方法。
(項目19)
エネルギーを前記複数のタインを通して送達し、前記解剖学的特徴を治療することをさらに含む、項目11に記載の方法。
(項目20)
治療電力または治療時間のうちの少なくとも1つを制御し、前記組織治療の範囲を前記治療領域および/または安全領域内に限定することをさらに含む、項目19に記載の方法。
(項目21)
エネルギーを前記治療構造を通して送達し、前記解剖学的特徴を治療することをさらに含む、項目1に記載の方法。
(項目22)
治療電力または治療時間のうちの少なくとも1つを制御し、前記組織治療の範囲を前記治療領域および/または安全領域内に限定することをさらに含む、項目21に記載の方法。
(項目23)
前記プローブのサーボモータを駆動し、前記治療構造を展開することをさらに含む、項目1に記載の方法。
(項目24)
前記治療領域または前記安全領域のうちの少なくとも1つを前記リアルタイム画像上に投影することは、前記治療構造のための1つ以上の停止位置を前記リアルタイム画像上に投影することを含む、項目1に記載の方法。
(項目25)
前記治療構造のための前記1つ以上の停止位置は、治療されるべき解剖学的特徴の近傍またはその中にあるように構成されている、項目24に記載の方法。
(項目26)
前記治療構造を前記リアルタイム画像上に表示することは、前記治療構造のリアルタイム位置を検出することと、前記検出されたリアルタイム位置に応答して、前記治療構造の仮想表現を表示することとを含む、項目24に記載の方法。
(項目27)
前記治療構造の前記仮想表現の位置をリアルタイムで更新することをさらに含む、項目26に記載の方法。
(項目28)
前記治療構造の前記仮想表現が前記針停止インジケータと出会うように、前記治療構造を前進させることをさらに含む、項目26に記載の方法。
(項目29)
前記針構造の前記仮想表現が前記針停止インジケータと出会うように、前記針構造が前進させられた後、前記ハンドルの前記第1のユーザインターフェースを調節し、前記針停止インジケータの位置を調節することをさらに含む、項目28に記載の方法。
(項目30)
組織内の解剖学的特徴を治療するためのシステムであって、前記システムは、
ハンドル、プローブ本体、および前記解剖学的特徴を治療するために前記プローブ本体から展開可能な治療構造を備えているプローブと、
前記プローブに結合されたリアルタイムディスプレイと
を備え、
前記リアルタイムディスプレイは、リアルタイム画像を表示し、前記展開された治療構造と治療領域または安全領域のうちの少なくとも1つとを前記リアルタイム画像上に投影するように構成され、
前記ハンドルは、前記治療領域または安全領域のうちの少なくとも1つの1つ以上の境界のサイズまたは位置のうちの1つ以上のものを調節するための第1のユーザインターフェースを備え、
前記ハンドルは、前記治療構造を前記プローブから展開するための第2のユーザインターフェースを備え、前記第2のユーザインターフェースを調節することによる前記プローブからの前記治療構造の展開は、前記投影された境界の前記サイズおよび/または位置を調節するための前記第1のユーザインターフェースの前記調節から独立している、
システム。
(項目31)
前記治療構造は、針構造を備えている、項目30に記載のシステム。
(項目32)
前記プローブは、前記針構造から展開可能な複数のタインをさらに備えている、項目31に記載のシステム。
(項目33)
前記リアルタイムディスプレイは、前記複数のタインの検出された位置に応答して、前記複数のタインの仮想表現を表示するように構成されている、項目32に記載のシステム。
(項目34)
前記治療プローブは、前記複数のタインの位置を検出するための1つ以上のセンサを備えている、項目33に記載のシステム。
(項目35)
前記リアルタイムディスプレイは、前記複数のタインのための1つ以上のタイン停止インジケータを示すように構成されている、項目32に記載のシステム。
(項目36)
前記ハンドルの前記第1のユーザインターフェースは、前記複数のタインの前記仮想表現が前記1つ以上のタイン停止インジケータと出会うように、前記複数のタインが展開された後、前記1つ以上のタイン停止インジケータを再位置付けするために調節されるように構成されている、項目35に記載のシステム。
(項目37)
前記治療プローブは、前記複数のタインを駆動するためのサーボを備えている、項目32に記載のシステム。
(項目38)
前記第2のユーザインターフェースは、前記治療構造に結合された1つ以上のスライド機構を備えている、項目30に記載のシステム。
(項目39)
前記治療プローブは、前記治療構造を駆動するためのサーボを備えている、項目30に記載のシステム。
(項目40)
前記リアルタイムディスプレイは、前記治療構造の検出された位置に応答して、前記治療構造の仮想表現を表示するように構成されている、項目30に記載のシステム。
(項目41)
前記治療プローブは、前記治療構造の位置を検出するための1つ以上のセンサを備えている、項目40に記載のシステム。
(項目42)
前記リアルタイムディスプレイは、前記針構造のための停止インジケータを示すように構成されている、項目40に記載のシステム。
(項目43)
前記ハンドルの前記第1のユーザインターフェースは、前記治療構造の前記仮想表現が前記停止インジケータと出会うように、前記治療構造が展開された後、前記停止インジケータを再位置付けするために調節されるように構成されている、項目42に記載のシステム。
(項目44)
前記第1のユーザインターフェースは、前記治療プローブのハンドル上のジョイスティックまたは指向性パッドを備えている、項目30に記載のシステム。
(項目45)
前記ジョイスティックまたは指向性パッドは、第1の方向に押され、前記投影された境界を拡大するように構成され、前記ジョイスティックまたは指向性パッドは、前記第1の方向と反対の第2の方向に押され、前記投影された境界を縮小するように構成されている、項目44に記載のシステム。
(項目46)
前記ジョイスティックまたは指向性パッドは、第3の方向に押され、前記投影された境界を前進させるように構成され、前記ジョイスティックまたは指向性パッドは、前記第3の方向と反対の第4の方向に押され、前記投影された境界を後退させるように構成されている、項目44に記載のシステム。
本明細書で記述される全ての出版物、特許、および特許出願は、各個別出版物、特許、および特許出願が、参照することにより組み込まれるように具体的かつ個別に示された場合と同一の程度に、参照することにより本明細書に組み込まれる。
Claims (19)
- 組織内の解剖学的特徴を治療するためのシステムであって、前記システムは、
ハンドル、プローブ本体、および前記解剖学的特徴を治療するために前記プローブ本体から展開可能な治療構造を備えているプローブと、
前記プローブに結合されたリアルタイムディスプレイと
を備え、
前記リアルタイムディスプレイは、リアルタイム画像を表示し、前記展開された治療構造と治療領域または安全領域のうちの少なくとも1つとを前記リアルタイム画像上に投影するように構成され、
前記ハンドルは、前記治療領域または安全領域のうちの前記少なくとも1つの1つ以上の境界のサイズおよび位置の両方を調節するための第1のユーザインターフェースを備え、前記第1のユーザインターフェースは、前記1つ以上の境界の前記サイズおよび位置の両方を同時に調節するように動作可能であり、
前記ハンドルは、前記治療構造を前記プローブから展開するための第2のユーザインターフェースを備え、前記第2のユーザインターフェースを調節することによる前記プローブからの前記治療構造の展開は、前記1つ以上の境界の前記サイズおよび位置を調節するための前記第1のユーザインターフェースの前記調節から独立している、システム。 - 前記治療構造は、針構造を備えている、請求項1に記載のシステム。
- 前記プローブは、前記針構造から展開可能な複数のタインをさらに備えている、請求項2に記載のシステム。
- 前記タインは、前記解剖学的特徴を治療するためのエネルギーを送達するように構成されている、請求項3に記載のシステム。
- 前記リアルタイムディスプレイは、前記複数のタインの検出された位置に応答して、前記複数のタインの仮想表現を表示するように構成されている、請求項3または請求項4に記載のシステム。
- 前記治療プローブは、前記複数のタインの位置を検出するための1つ以上のセンサを備えている、請求項3~5のいずれかに記載のシステム。
- 前記リアルタイムディスプレイは、前記複数のタインのための1つ以上のタイン停止インジケータを示すように構成されている、請求項3~6のいずれかに記載のシステム。
- 前記ハンドルの前記第1のユーザインターフェースは、前記複数のタインの前記仮想表現が前記1つ以上のタイン停止インジケータと出会うように、前記複数のタインが展開された後、前記1つ以上のタイン停止インジケータを再位置付けするために調節されるように構成されている、請求項7に記載のシステム。
- 前記治療プローブは、前記複数のタインを駆動するためのサーボを備えている、請求項3~8のいずれかに記載のシステム。
- 前記第2のユーザインターフェースは、前記治療構造に結合された1つ以上のスライド機構を備えている、請求項1~9のいずれかに記載のシステム。
- 前記治療プローブは、前記治療構造を駆動するためのサーボを備えている、請求項1~10のいずれかに記載のシステム。
- 前記リアルタイムディスプレイは、前記治療構造の検出された位置に応答して、前記治療構造の仮想表現を表示するように構成されている、請求項1~11のいずれかに記載のシステム。
- 前記治療プローブは、前記治療構造の位置を検出するための1つ以上のセンサを備えている、請求項1~12のいずれかに記載のシステム。
- 前記リアルタイムディスプレイは、前記治療構造のための停止インジケータを示すように構成されている、請求項1~13のいずれかに記載のシステム。
- 前記ハンドルの前記第1のユーザインターフェースは、前記治療構造の前記仮想表現が前記停止インジケータと出会うように、前記治療構造が展開された後、前記停止インジケータを再位置付けするために調節されるように構成されている、請求項14に記載のシステム。
- 前記第1のユーザインターフェースは、前記治療プローブの前記ハンドル上のジョイスティックまたは指向性パッドを備えている、請求項1~15のいずれかに記載のシステム。
- 前記ジョイスティックまたは指向性パッドは、第1の方向に押され、前記1つ以上の境界を拡大するように構成され、前記ジョイスティックまたは指向性パッドは、前記第1の方向と反対の第2の方向に押され、前記1つ以上の境界を縮小するように構成されている、請求項16に記載のシステム。
- 前記ジョイスティックまたは指向性パッドは、第3の方向に押され、前記1つ以上の境界を前進させるように構成され、前記ジョイスティックまたは指向性パッドは、前記第3の方向と反対の第4の方向に押され、前記1つ以上の境界を後退させるように構成されている、請求項16または請求項17に記載のシステム。
- 前記ジョイスティックまたは指向性パッドは、前記1つ以上の境界の前記サイズおよび位置が調節されているとき、前記治療プローブの前記ハンドルに対して静止したままであるように構成されている、請求項16~18のいずれかに記載のシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022063288A JP2022082707A (ja) | 2016-11-14 | 2022-04-06 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
| JP2024032047A JP2024061751A (ja) | 2016-11-14 | 2024-03-04 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662421669P | 2016-11-14 | 2016-11-14 | |
| US62/421,669 | 2016-11-14 | ||
| PCT/US2017/061366 WO2018089923A1 (en) | 2016-11-14 | 2017-11-13 | Methods and systems for real-time planning and monitoring of ablation needle deployment in tissue |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022063288A Division JP2022082707A (ja) | 2016-11-14 | 2022-04-06 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019534104A JP2019534104A (ja) | 2019-11-28 |
| JP2019534104A5 JP2019534104A5 (ja) | 2020-12-24 |
| JP7148511B2 true JP7148511B2 (ja) | 2022-10-05 |
Family
ID=62106224
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019524870A Active JP7148511B2 (ja) | 2016-11-14 | 2017-11-13 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
| JP2022063288A Withdrawn JP2022082707A (ja) | 2016-11-14 | 2022-04-06 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
| JP2024032047A Pending JP2024061751A (ja) | 2016-11-14 | 2024-03-04 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022063288A Withdrawn JP2022082707A (ja) | 2016-11-14 | 2022-04-06 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
| JP2024032047A Pending JP2024061751A (ja) | 2016-11-14 | 2024-03-04 | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US11219483B2 (ja) |
| EP (2) | EP3537968B1 (ja) |
| JP (3) | JP7148511B2 (ja) |
| KR (1) | KR20190086485A (ja) |
| CN (2) | CN110234274B (ja) |
| AU (1) | AU2017356228B2 (ja) |
| CA (1) | CA3043490A1 (ja) |
| WO (1) | WO2018089923A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10643371B2 (en) * | 2014-08-11 | 2020-05-05 | Covidien Lp | Treatment procedure planning system and method |
| EP3328308B1 (en) * | 2016-09-27 | 2019-05-29 | Brainlab AG | Efficient positioning of a mechatronic arm |
| CN115715689A (zh) | 2016-11-11 | 2023-02-28 | 杰尼索尼克斯公司 | 组织受控治疗及与组织和/或治疗数据的动态交互和比较 |
| EP3537968B1 (en) | 2016-11-14 | 2023-07-19 | Gynesonics, Inc. | Systems for real-time planning and monitoring of ablation needle deployment in tissue |
| WO2019094808A1 (en) * | 2017-11-09 | 2019-05-16 | Acessa Health Inc. | System for controlling ablation treatment and visualization |
| AU2019262183A1 (en) | 2018-05-04 | 2020-09-10 | Hologic, Inc. | Biopsy needle visualization |
| US11071601B2 (en) * | 2019-11-11 | 2021-07-27 | Procept Biorobotics Corporation | Surgical probes for tissue resection with robotic arms |
| CN110882057B (zh) * | 2019-12-11 | 2023-01-20 | 南京亿高微波系统工程有限公司 | 一种退针布针系统及其定位方法 |
| EP4076261A1 (en) * | 2019-12-19 | 2022-10-26 | Sony Group Corporation | Robotic arm system, method and computer program |
| US10856841B1 (en) | 2020-01-24 | 2020-12-08 | King Saud University | Ultrasonic imaging probe |
| US11123046B1 (en) * | 2020-05-05 | 2021-09-21 | Techsomed Medical Technologies Ltd. | Monitoring thermal ablation using registration of B-mode ultrasound images |
| KR102405967B1 (ko) * | 2020-06-11 | 2022-06-07 | 인하대학교 산학협력단 | 실시간 영상기술 기반 전기장 인가 시스템 및 방법 |
| CN117301044B (zh) * | 2023-08-31 | 2024-07-19 | 北京纳通医用机器人科技有限公司 | 末端工具的运动控制方法、装置、设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001340350A (ja) | 2000-03-28 | 2001-12-11 | Aloka Co Ltd | 医療システム |
| WO2009049082A1 (en) | 2007-10-12 | 2009-04-16 | Gynesonics, Inc. | Methods and systems for controlled deployment of needles in tissue |
| WO2014039795A1 (en) | 2012-09-07 | 2014-03-13 | Gynesonics, Inc. | Methods and systems for controlled deployment of needle structures in tissue |
| JP2015528114A (ja) | 2012-07-20 | 2015-09-24 | ラテック イ/エスLattec I/S | 乾燥スティックデバイスおよびサンプル中の分析物の決定方法 |
Family Cites Families (64)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5590658A (en) | 1995-06-29 | 1997-01-07 | Teratech Corporation | Portable ultrasound imaging system |
| US5964709A (en) | 1995-06-29 | 1999-10-12 | Teratech Corporation | Portable ultrasound imaging system |
| CA2225784A1 (en) | 1995-06-30 | 1997-01-23 | Boston Scientific Corporation | Ultrasound imaging catheter with a cutting element |
| US6050992A (en) | 1997-05-19 | 2000-04-18 | Radiotherapeutics Corporation | Apparatus and method for treating tissue with multiple electrodes |
| ITMI991608A1 (it) | 1999-07-21 | 2001-01-21 | Thermo Med 2000 Kft | Sonda elettrochirurgica per il trattamento di tumori mediante radiofrequenza |
| US7387628B1 (en) | 2000-09-15 | 2008-06-17 | Boston Scientific Scimed, Inc. | Methods and systems for focused bipolar tissue ablation |
| US6540677B1 (en) | 2000-11-17 | 2003-04-01 | Bjorn A. J. Angelsen | Ultrasound transceiver system for remote operation through a minimal number of connecting wires |
| EP1385439A1 (en) | 2001-05-10 | 2004-02-04 | Rita Medical Systems, Inc. | Rf tissue ablation apparatus and method |
| US6969354B1 (en) | 2001-09-25 | 2005-11-29 | Acuson Corporation | Adaptable intraoperative or endocavity ultrasound probe |
| DE60112591T2 (de) | 2001-11-23 | 2006-05-18 | Nucletron B.V. | Automatische bildgesteuerte Einrichtung zur Einführung einer Kanüle in einen menschlichen oder tierischen Körper zur Strahlentherapie im diesem Körper |
| US8221321B2 (en) | 2002-06-07 | 2012-07-17 | Verathon Inc. | Systems and methods for quantification and classification of fluids in human cavities in ultrasound images |
| US6944490B1 (en) | 2002-09-25 | 2005-09-13 | Advanced Cardiovascular Systems, Inc. | Apparatus and method for positioning and delivering a therapeutic tool to the inside of a heart |
| US6936048B2 (en) | 2003-01-16 | 2005-08-30 | Charlotte-Mecklenburg Hospital Authority | Echogenic needle for transvaginal ultrasound directed reduction of uterine fibroids and an associated method |
| JP4847442B2 (ja) | 2004-04-02 | 2011-12-28 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 3d撮像のための超音波腔内プローブ |
| NL1027678C2 (nl) | 2004-12-07 | 2006-06-12 | Benedictus Christiaan Schoot | Inrichting en werkwijze voor onderzoek van een lichaamsholte. |
| US7918795B2 (en) | 2005-02-02 | 2011-04-05 | Gynesonics, Inc. | Method and device for uterine fibroid treatment |
| US7517346B2 (en) | 2005-02-08 | 2009-04-14 | Boston Scientific Scimed, Inc. | Radio frequency ablation system with integrated ultrasound imaging |
| US8377041B2 (en) | 2005-02-28 | 2013-02-19 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US7963941B2 (en) | 2005-04-12 | 2011-06-21 | Wilk Peter J | Intra-abdominal medical method and associated device |
| US20090043295A1 (en) | 2005-06-06 | 2009-02-12 | Ams Research Corporation | Fibroid Treatment Methods and Devices |
| US8512333B2 (en) | 2005-07-01 | 2013-08-20 | Halt Medical Inc. | Anchored RF ablation device for the destruction of tissue masses |
| US8512330B2 (en) | 2005-07-01 | 2013-08-20 | Halt Medical Inc. | Ablation method |
| US8080009B2 (en) | 2005-07-01 | 2011-12-20 | Halt Medical Inc. | Radio frequency ablation device for the destruction of tissue masses |
| US7874986B2 (en) | 2006-04-20 | 2011-01-25 | Gynesonics, Inc. | Methods and devices for visualization and ablation of tissue |
| US9357977B2 (en) | 2006-01-12 | 2016-06-07 | Gynesonics, Inc. | Interventional deployment and imaging system |
| US7815571B2 (en) | 2006-04-20 | 2010-10-19 | Gynesonics, Inc. | Rigid delivery systems having inclined ultrasound and needle |
| JP4812458B2 (ja) | 2006-02-15 | 2011-11-09 | 株式会社東芝 | 超音波診断装置及び治療支援装置 |
| JP4768494B2 (ja) | 2006-03-31 | 2011-09-07 | テルモ株式会社 | 画像診断装置およびその処理方法 |
| US8206300B2 (en) | 2008-08-26 | 2012-06-26 | Gynesonics, Inc. | Ablation device with articulated imaging transducer |
| US20100056926A1 (en) | 2008-08-26 | 2010-03-04 | Gynesonics, Inc. | Ablation device with articulated imaging transducer |
| US10595819B2 (en) | 2006-04-20 | 2020-03-24 | Gynesonics, Inc. | Ablation device with articulated imaging transducer |
| US8298145B2 (en) | 2006-08-01 | 2012-10-30 | Gynesonics, Inc. | Peri-capsular fibroid treatment |
| US20090131790A1 (en) * | 2007-05-15 | 2009-05-21 | Gynesonics, Inc. | Systems and methods for deploying echogenic components in ultrasonic imaging fields |
| CN101801275B (zh) | 2007-08-15 | 2013-04-24 | 皇家飞利浦电子股份有限公司 | 用于产生组织部分附近的加热尖头的图像的方法和设备 |
| JP5490706B2 (ja) | 2007-10-26 | 2014-05-14 | ユニバーシティ オブ バージニア パテント ファウンデーション | 超音波エネルギーおよびマイクロバブルを使用する治療およびイメージング用システムおよびその関連方法 |
| JP5304986B2 (ja) | 2008-03-31 | 2013-10-02 | 株式会社日立メディコ | 超音波診断装置 |
| US20090287081A1 (en) * | 2008-04-29 | 2009-11-19 | Gynesonics , Inc | Submucosal fibroid ablation for the treatment of menorrhagia |
| US8663130B2 (en) | 2008-05-28 | 2014-03-04 | Technion Researh & Development Foundation Ltd. | Ultrasound guided robot for flexible needle steering |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US9089287B2 (en) | 2008-12-30 | 2015-07-28 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Image-guided ablation system and method for monitoring an ablation procedure |
| US8287485B2 (en) | 2009-01-28 | 2012-10-16 | Olympus Medical Systems Corp. | Treatment system for surgery and control method of treatment system for surgery |
| US11284931B2 (en) | 2009-02-03 | 2022-03-29 | Tsunami Medtech, Llc | Medical systems and methods for ablating and absorbing tissue |
| US8690776B2 (en) | 2009-02-17 | 2014-04-08 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image guided surgery |
| US8262574B2 (en) | 2009-02-27 | 2012-09-11 | Gynesonics, Inc. | Needle and tine deployment mechanism |
| JP5560283B2 (ja) | 2009-10-30 | 2014-07-23 | 株式会社日立メディコ | 超音波診断装置、被検体の診断対象部位の疾患の評価用画像生成方法、及び被検体の診断対象部位の疾患の評価用画像生成プログラム |
| US20120071794A1 (en) * | 2010-09-20 | 2012-03-22 | Alma Lasers Ltd. | Robotic System for Delivering Energy for Treatment of Skin of a Subject |
| ES2900584T3 (es) * | 2010-12-23 | 2022-03-17 | Bard Access Systems Inc | Sistema para guiar un instrumento rígido |
| EP2671512A4 (en) | 2011-02-01 | 2015-07-29 | Konica Minolta Inc | ULTRASONIC PROBE OF BODY CAVITY |
| EP2696786B1 (en) | 2011-04-12 | 2020-07-08 | Thermedical, Inc. | Devices for remote temperature monitoring in fluid enhanced ablation therapy |
| US8814796B2 (en) | 2012-01-10 | 2014-08-26 | Hologic, Inc. | System and method for tissue ablation in a body cavity |
| US20150173619A1 (en) * | 2012-04-17 | 2015-06-25 | Collage Medical Imaging Ltd. | Organ mapping system using an optical coherence tomography probe |
| US9439627B2 (en) | 2012-05-22 | 2016-09-13 | Covidien Lp | Planning system and navigation system for an ablation procedure |
| US9955946B2 (en) | 2014-03-12 | 2018-05-01 | Cibiem, Inc. | Carotid body ablation with a transvenous ultrasound imaging and ablation catheter |
| US20150150497A1 (en) | 2012-07-18 | 2015-06-04 | Mor Research Applications Ltd. | Intrauterine device |
| US9615878B2 (en) | 2012-12-21 | 2017-04-11 | Volcano Corporation | Device, system, and method for imaging and tissue characterization of ablated tissue |
| WO2014120923A1 (en) | 2013-01-31 | 2014-08-07 | Muffin Incorporated | 3d catheter-based ultrasound assembly with gimbal-mount transducer and single-coil drive |
| US10555719B2 (en) | 2013-03-12 | 2020-02-11 | St. Jude Medical Puerto Rico Llc | Ultrasound assisted needle puncture mechanism |
| US9198707B2 (en) | 2013-03-15 | 2015-12-01 | Warsaw Orthopedic, Inc. | Nerve and soft tissue ablation device and method |
| US9198719B2 (en) | 2013-09-30 | 2015-12-01 | Gyrus Acmi, Inc. | Electrosurgical fibroid ablation system and method |
| CN112515609A (zh) | 2013-11-14 | 2021-03-19 | Clph有限责任公司 | 用于心外膜成像和注射的设备、系统和方法 |
| KR102356719B1 (ko) | 2014-12-01 | 2022-01-27 | 삼성메디슨 주식회사 | 초음파 영상 장치 및 그 동작 방법 |
| US20160278740A1 (en) | 2015-03-23 | 2016-09-29 | Hyland Software, Inc. | Ultrasound imaging system and method |
| US10362965B2 (en) | 2015-04-22 | 2019-07-30 | Acclarent, Inc. | System and method to map structures of nasal cavity |
| EP3537968B1 (en) | 2016-11-14 | 2023-07-19 | Gynesonics, Inc. | Systems for real-time planning and monitoring of ablation needle deployment in tissue |
-
2017
- 2017-11-13 EP EP17870152.0A patent/EP3537968B1/en active Active
- 2017-11-13 KR KR1020197016636A patent/KR20190086485A/ko active IP Right Grant
- 2017-11-13 CN CN201780080655.6A patent/CN110234274B/zh active Active
- 2017-11-13 AU AU2017356228A patent/AU2017356228B2/en not_active Ceased
- 2017-11-13 CA CA3043490A patent/CA3043490A1/en active Pending
- 2017-11-13 WO PCT/US2017/061366 patent/WO2018089923A1/en active Application Filing
- 2017-11-13 US US15/811,520 patent/US11219483B2/en active Active
- 2017-11-13 EP EP23178101.4A patent/EP4275636A3/en active Pending
- 2017-11-13 CN CN202311313022.9A patent/CN117481800A/zh active Pending
- 2017-11-13 JP JP2019524870A patent/JP7148511B2/ja active Active
-
2021
- 2021-12-03 US US17/542,176 patent/US20220287763A1/en active Pending
-
2022
- 2022-04-06 JP JP2022063288A patent/JP2022082707A/ja not_active Withdrawn
-
2024
- 2024-03-04 JP JP2024032047A patent/JP2024061751A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001340350A (ja) | 2000-03-28 | 2001-12-11 | Aloka Co Ltd | 医療システム |
| WO2009049082A1 (en) | 2007-10-12 | 2009-04-16 | Gynesonics, Inc. | Methods and systems for controlled deployment of needles in tissue |
| JP2011500164A (ja) | 2007-10-12 | 2011-01-06 | ガイネソニックス, インコーポレイテッド | 組織内における針の制御された展開のための方法およびシステム |
| JP2015528114A (ja) | 2012-07-20 | 2015-09-24 | ラテック イ/エスLattec I/S | 乾燥スティックデバイスおよびサンプル中の分析物の決定方法 |
| WO2014039795A1 (en) | 2012-09-07 | 2014-03-13 | Gynesonics, Inc. | Methods and systems for controlled deployment of needle structures in tissue |
| JP2015529114A (ja) | 2012-09-07 | 2015-10-05 | ガイネソニックス, インコーポレイテッド | 組織における針構造の制御された展開のための方法およびシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4275636A2 (en) | 2023-11-15 |
| US11219483B2 (en) | 2022-01-11 |
| JP2022082707A (ja) | 2022-06-02 |
| EP3537968A4 (en) | 2019-10-30 |
| CN110234274A (zh) | 2019-09-13 |
| KR20190086485A (ko) | 2019-07-22 |
| CA3043490A1 (en) | 2018-05-17 |
| AU2017356228A1 (en) | 2019-05-30 |
| EP3537968A1 (en) | 2019-09-18 |
| JP2024061751A (ja) | 2024-05-08 |
| WO2018089923A1 (en) | 2018-05-17 |
| EP3537968B1 (en) | 2023-07-19 |
| US20220287763A1 (en) | 2022-09-15 |
| CN117481800A (zh) | 2024-02-02 |
| AU2017356228B2 (en) | 2022-12-01 |
| US20180132927A1 (en) | 2018-05-17 |
| JP2019534104A (ja) | 2019-11-28 |
| CN110234274B (zh) | 2023-11-03 |
| EP4275636A3 (en) | 2023-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7148511B2 (ja) | 組織内でのアブレーション針展開のリアルタイム計画および監視の方法およびシステム | |
| US11583243B2 (en) | Methods and systems for controlled deployment of needle structures in tissue | |
| JP2023021242A (ja) | ドップラー超音波を用いたアブレーション進行過程の監視のための方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201112 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211020 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220825 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220922 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7148511 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |