JP7141706B2 - カスタマイズされた装置を設計および作製するための方法およびシステム - Google Patents
カスタマイズされた装置を設計および作製するための方法およびシステム Download PDFInfo
- Publication number
- JP7141706B2 JP7141706B2 JP2018557165A JP2018557165A JP7141706B2 JP 7141706 B2 JP7141706 B2 JP 7141706B2 JP 2018557165 A JP2018557165 A JP 2018557165A JP 2018557165 A JP2018557165 A JP 2018557165A JP 7141706 B2 JP7141706 B2 JP 7141706B2
- Authority
- JP
- Japan
- Prior art keywords
- points
- customized
- base portion
- target
- bone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 202
- 210000000988 bone and bone Anatomy 0.000 claims description 138
- 230000006870 function Effects 0.000 claims description 105
- 238000004519 manufacturing process Methods 0.000 claims description 68
- 238000013461 design Methods 0.000 claims description 51
- 238000010146 3D printing Methods 0.000 claims description 26
- 239000000654 additive Substances 0.000 claims description 19
- 230000000996 additive effect Effects 0.000 claims description 19
- 238000004590 computer program Methods 0.000 claims description 16
- 238000005520 cutting process Methods 0.000 claims description 12
- 238000005452 bending Methods 0.000 claims description 10
- 238000012986 modification Methods 0.000 claims description 9
- 230000004048 modification Effects 0.000 claims description 9
- 238000003801 milling Methods 0.000 claims description 7
- 125000006850 spacer group Chemical group 0.000 claims description 6
- 239000007943 implant Substances 0.000 claims description 3
- 210000003484 anatomy Anatomy 0.000 description 41
- 238000011960 computer-aided design Methods 0.000 description 38
- 239000013598 vector Substances 0.000 description 37
- 238000005259 measurement Methods 0.000 description 25
- 206010017076 Fracture Diseases 0.000 description 20
- 239000012634 fragment Substances 0.000 description 20
- 238000002595 magnetic resonance imaging Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 18
- 208000010392 Bone Fractures Diseases 0.000 description 15
- 238000004891 communication Methods 0.000 description 15
- 230000000694 effects Effects 0.000 description 15
- 238000003860 storage Methods 0.000 description 14
- 208000009782 Plagiocephaly Diseases 0.000 description 13
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 10
- 230000000399 orthopedic effect Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 230000000875 corresponding effect Effects 0.000 description 9
- 210000003423 ankle Anatomy 0.000 description 8
- 238000002591 computed tomography Methods 0.000 description 8
- 230000002159 abnormal effect Effects 0.000 description 7
- 238000004422 calculation algorithm Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 238000001356 surgical procedure Methods 0.000 description 7
- 238000011882 arthroplasty Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005553 drilling Methods 0.000 description 6
- 230000004927 fusion Effects 0.000 description 6
- 230000003993 interaction Effects 0.000 description 6
- 210000003127 knee Anatomy 0.000 description 6
- 238000007639 printing Methods 0.000 description 6
- 210000003625 skull Anatomy 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 210000005036 nerve Anatomy 0.000 description 5
- 238000005457 optimization Methods 0.000 description 5
- 230000036407 pain Effects 0.000 description 5
- 239000007787 solid Substances 0.000 description 5
- 230000003068 static effect Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 4
- 230000007547 defect Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000002980 postoperative effect Effects 0.000 description 4
- 238000013456 study Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 210000000623 ulna Anatomy 0.000 description 4
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 3
- 230000001413 cellular effect Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 230000001054 cortical effect Effects 0.000 description 3
- 230000002950 deficient Effects 0.000 description 3
- 238000012938 design process Methods 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 210000002683 foot Anatomy 0.000 description 3
- 238000002513 implantation Methods 0.000 description 3
- 230000008676 import Effects 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- 230000001009 osteoporotic effect Effects 0.000 description 3
- 239000004417 polycarbonate Substances 0.000 description 3
- 229920000515 polycarbonate Polymers 0.000 description 3
- 239000004626 polylactic acid Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 239000010936 titanium Substances 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 206010061246 Intervertebral disc degeneration Diseases 0.000 description 2
- 239000004372 Polyvinyl alcohol Substances 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000037182 bone density Effects 0.000 description 2
- 238000005094 computer simulation Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 210000002758 humerus Anatomy 0.000 description 2
- 229910052500 inorganic mineral Inorganic materials 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 239000011707 mineral Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 229920000747 poly(lactic acid) Polymers 0.000 description 2
- 229920002451 polyvinyl alcohol Polymers 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000010187 selection method Methods 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 238000013179 statistical model Methods 0.000 description 2
- 239000003826 tablet Substances 0.000 description 2
- 229910052719 titanium Inorganic materials 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 238000010200 validation analysis Methods 0.000 description 2
- 206010002091 Anaesthesia Diseases 0.000 description 1
- 102000007350 Bone Morphogenetic Proteins Human genes 0.000 description 1
- 108010007726 Bone Morphogenetic Proteins Proteins 0.000 description 1
- 241000282465 Canis Species 0.000 description 1
- 229910000684 Cobalt-chrome Inorganic materials 0.000 description 1
- 229910001200 Ferrotitanium Inorganic materials 0.000 description 1
- 125000000174 L-prolyl group Chemical group [H]N1C([H])([H])C([H])([H])C([H])([H])[C@@]1([H])C(*)=O 0.000 description 1
- 208000006670 Multiple fractures Diseases 0.000 description 1
- 208000008558 Osteophyte Diseases 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 206010049514 Traumatic fracture Diseases 0.000 description 1
- WAIPAZQMEIHHTJ-UHFFFAOYSA-N [Cr].[Co] Chemical compound [Cr].[Co] WAIPAZQMEIHHTJ-UHFFFAOYSA-N 0.000 description 1
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000037005 anaesthesia Effects 0.000 description 1
- 229920000249 biocompatible polymer Polymers 0.000 description 1
- 230000037237 body shape Effects 0.000 description 1
- 230000008468 bone growth Effects 0.000 description 1
- 229940112869 bone morphogenetic protein Drugs 0.000 description 1
- 230000010072 bone remodeling Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 230000001684 chronic effect Effects 0.000 description 1
- 239000010952 cobalt-chrome Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007850 degeneration Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 210000005069 ears Anatomy 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000003100 immobilizing effect Effects 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000007620 mathematical function Methods 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 231100000862 numbness Toxicity 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 210000000278 spinal cord Anatomy 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000010897 surface acoustic wave method Methods 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 210000002303 tibia Anatomy 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images

































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/5044—Designing or manufacturing processes
- A61F2/5046—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, finite-element analysis or CAD-CAM techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7059—Cortical plates
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/80—Cortical plates, i.e. bone plates; Instruments for holding or positioning cortical plates, or for compressing bones attached to cortical plates
- A61B17/8061—Cortical plates, i.e. bone plates; Instruments for holding or positioning cortical plates, or for compressing bones attached to cortical plates specially adapted for particular bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/3094—Designing or manufacturing processes
- A61F2/30942—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, CT or NMR scans, finite-element analysis or CAD-CAM techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F5/00—Orthopaedic methods or devices for non-surgical treatment of bones or joints; Nursing devices; Anti-rape devices
- A61F5/01—Orthopaedic devices, e.g. splints, casts or braces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F5/00—Orthopaedic methods or devices for non-surgical treatment of bones or joints; Nursing devices; Anti-rape devices
- A61F5/01—Orthopaedic devices, e.g. splints, casts or braces
- A61F5/0102—Orthopaedic devices, e.g. splints, casts or braces specially adapted for correcting deformities of the limbs or for supporting them; Ortheses, e.g. with articulations
- A61F5/0104—Orthopaedic devices, e.g. splints, casts or braces specially adapted for correcting deformities of the limbs or for supporting them; Ortheses, e.g. with articulations without articulation
- A61F5/0118—Orthopaedic devices, e.g. splints, casts or braces specially adapted for correcting deformities of the limbs or for supporting them; Ortheses, e.g. with articulations without articulation for the arms, hands or fingers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F5/00—Orthopaedic methods or devices for non-surgical treatment of bones or joints; Nursing devices; Anti-rape devices
- A61F5/01—Orthopaedic devices, e.g. splints, casts or braces
- A61F5/10—Devices for correcting deformities of the fingers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/30—Auxiliary operations or equipment
- B29C64/386—Data acquisition or data processing for additive manufacturing
- B29C64/393—Data acquisition or data processing for additive manufacturing for controlling or regulating additive manufacturing processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y50/00—Data acquisition or data processing for additive manufacturing
- B33Y50/02—Data acquisition or data processing for additive manufacturing for controlling or regulating additive manufacturing processes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/18—Image warping, e.g. rearranging pixels individually
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B2017/568—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor produced with shape and dimensions specific for an individual patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/102—Modelling of surgical devices, implants or prosthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/3094—Designing or manufacturing processes
- A61F2/30942—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, CT or NMR scans, finite-element analysis or CAD-CAM techniques
- A61F2002/30943—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, CT or NMR scans, finite-element analysis or CAD-CAM techniques using mathematical models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/3094—Designing or manufacturing processes
- A61F2/30942—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, CT or NMR scans, finite-element analysis or CAD-CAM techniques
- A61F2002/30952—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, CT or NMR scans, finite-element analysis or CAD-CAM techniques using CAD-CAM techniques or NC-techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/5044—Designing or manufacturing processes
- A61F2/5046—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, finite-element analysis or CAD-CAM techniques
- A61F2002/5047—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, finite-element analysis or CAD-CAM techniques using mathematical models
- A61F2002/5049—Computer aided shaping, e.g. rapid prototyping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/5044—Designing or manufacturing processes
- A61F2/5046—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, finite-element analysis or CAD-CAM techniques
- A61F2002/505—Designing or manufacturing processes for designing or making customized prostheses, e.g. using templates, finite-element analysis or CAD-CAM techniques using CAD-CAM techniques or NC-techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/41—Medical
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2219/00—Indexing scheme for manipulating 3D models or images for computer graphics
- G06T2219/20—Indexing scheme for editing of 3D models
- G06T2219/2021—Shape modification
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Vascular Medicine (AREA)
- Manufacturing & Machinery (AREA)
- Surgery (AREA)
- Materials Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Transplantation (AREA)
- Cardiology (AREA)
- Geometry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Computer Graphics (AREA)
- Nursing (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Neurology (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Robotics (AREA)
- Architecture (AREA)
- Prostheses (AREA)
- Processing Or Creating Images (AREA)
- Image Generation (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
Description
ターゲット形状の第2のデジタルモデルをインポートする工程と、
前記ターゲット形状に基づいて前記第1のデジタルモデルを修正してカスタマイズされた装置の前記第3のデジタルモデルを生成する工程であって、
一般的なベース部分の第1のデジタルモデルに関連づけられたソース点集合の相対位置およびターゲット形状に射影された同じ点の相対位置に基づいてワーピング補間関数を決定すること、および
ワーピング補間関数を前記一般的なベース部分の全ての頂点に適用して前記カスタマイズされた装置の前記第3のデジタルモデルを生成すること
を含む工程と、
を含み、前記カスタマイズされた装置の第3のデジタルモデルは前記ターゲット形状に適合するように構成されている方法を提供する。
一般的なベース部分の第1のデジタルファイルをインポートする工程と、
ターゲット形状の第2のデジタルファイルをインポートする工程と、
前記ターゲット形状に基づいて前記第1のデジタルファイルを修正してカスタマイズされた装置のデジタルモデルを生成する工程であって、
対応するソース点位置を有する一般的なベース部分に関連づけられた点集合の相対位置および対応するターゲット点位置を有するターゲット形状に関連づけられた同じ点の相対位置を決定する前記一般的なベース部分と前記ターゲット形状との間の射影に基づいて、ワーピング補間関数を決定すること、および
前記ワーピング補間関数を前記一般的なベース部分の全ての点に適用して前記カスタマイズされた装置の前記デジタルモデルを生成すること
を含む工程と、
を含み、前記カスタマイズされた装置のデジタルモデルは前記ターゲット形状に適合するように構成されている方法を提供する。
一般的なベース部分の第1のデジタルファイルをインポートする工程であって、前記第1のデジタルファイルは3D印刷に適した三角形分割頂点境界表現である工程と、
患者に関する患者パラメータのセットをインポートする工程と、
前記患者パラメータに基づいて前記一般的なベース部分の全ての頂点をワープしてカスタマイズされた医療装置のデジタルモデルを生成する工程と、
前記カスタマイズされた装置の前記デジタルモデルをコンピュータ支援製造(CAM)装置にエクスポートする工程と、
前記カスタマイズされた装置を前記CAM装置によって製造する工程と
を含む方法を提供する。
プロセッサと、
前記プロセッサで実行するための
一般的なベース部分の第1のデジタルファイルをインポートする工程、
ターゲット形状の第2のデジタルファイルをインポートする工程、
前記ターゲット形状に基づいて前記第1のデジタルファイルを修正してカスタマイズされた装置のデジタルモデルを生成する工程であって、
対応するソース点位置を有する一般的なベース部分に関連づけられた点集合の相対位置および対応するターゲット点位置を有するターゲット形状に射影された同じ点の相対位置を決定する前記一般的なベース部分と前記ターゲット形状との間の射影に基づいて、ワーピング補間関数を決定すること、および
ワーピング補間関数を前記一般的なベース部分の前記点に適用して前記カスタマイズされた装置の前記デジタルモデルを生成すること
を含む工程と、
のための命令を含むコンピュータプログラムを格納するためのメモリと
を備え、前記カスタマイズされた装置の前記デジタルモデルは前記ターゲット形状に適合するように構成されているシステムを提供する。
コンピュータ支援製造(CAM)装置と、
プロセッサと、
前記プロセッサで実行するための
一般的なベース部分の第1のデジタルファイルをインポートする工程であって、前記第1のデジタルファイルは3D印刷に適した三角形分割頂点境界表現である工程と、
患者に関する患者パラメータのセットをインポートする工程と、
前記患者パラメータに基づいて前記一般的なベース部分の全ての頂点をワープしてカスタマイズされた医療装置のデジタルモデルを生成する工程と、
前記カスタマイズされた装置の前記デジタルモデルを前記CAM装置にエクスポートする工程と、
のための命令を含むコンピュータプログラムを格納するためのメモリと、
を備え、前記CAM装置は、前記エクスポートされたデジタルモデルに基づいて前記カスタマイズされた装置を製造するように構成されているシステムを提供する。
1)ベースモデルの設計特徴を維持し、
2)限界寸法(例えばプレートの厚さ)を維持し、
3)自動化システム(一般的な/ベース装置ファイルと共に格納されたソース点ファイル)を有し、それによりユーザの影響/誤りの可能性をなくすか減らすことによって結果を標準化し、かつ
4)特に付加製造(3D印刷)およびCNC機械加工の新しい可能な技術のために最適化された出力ファイルを意図的に生成する。
1)この製造方法は幾何学的複雑さが増しても単純な幾何学的形状よりも製造するのに追加費用がかからないことを意味する。例えば、最適化された内部格子設計などにより好適な装置の剛性を維持しながらも部分重量を減らすために高い幾何学的複雑さを用いる場合、複雑な部分の印刷は、この部分を作り出すために使用される材料が少なくなるので、幾何学的に単純な中実部分を印刷するよりも安価である。このように3D印刷により設計の複雑さを高めることが可能になる。
2)従来のロボット構築ライン製造プロセスでは、新しい設計の製造のために製造ラインを構築するのに時間がかかり、かつそれにより高価になる。成形および鋳造製造プロセスの場合、当該装置設計の最初の型を製造するのは高価である。製造ラインまたは型が構築されると、各個々の装置を製造するのはさらに安価になる。これは付加製造プロセスの場合には該当せず、付加製造プロセスでは、例えば100コピーの同じ(マスタ)設計として100個のカスタマイズされたバージョンの装置を製造するための1単位当たりのコストは同じある(CAD時間は考慮しない)。これにより、付加製造プロセスは装置のカスタマイズに対して実証可能な利点がある製造装置に適用されやすくなる。1つのそのような分野は生物医学装置産業であり、そこでは数多くの研究により患者固有の計画、ガイドおよび装置の使用により患者の臨床結果が向上することが証明されている。
現在のところ、3D表面をCADで表す2つの主な方法、すなわちパラメトリック曲面および等値面(ポリゴン細分割、多くの場合、三角形分割点)が存在する。どちらも異なる種類の境界表現(すなわち体積を取り囲む表面)を記述し、どちらも3D座標点によって構成される。境界表現はボリューム画像データとは異なり、CTもしくはMRIスキャンによって取得されたDICOM画像からのグレースケール値を閾値処理することによって得られる。
パラメトリック曲面は、ベジェ、B-スプラインおよび非一様有理Bスプライン(NURBS)曲線/表面などの曲線および/または表面から構築することができる。これらの場合の曲線および表面は、以下の3つの異なる種類の点によって決定される。
a)境界周囲(表面)または端部(曲線)を定める点(生物医学の事例では標識点であってもよい);表面/曲線は3D空間においてこれらの点に交わるように制約されている(NURBS曲線の構築の例については図16Aを参照、ここでは、点1(sP1)および点4(eP4)は境界を定める点であり、sは「開始」を表し、eは「終了」を表す)
b)(重みを持つ)制御点(各制御点が有する表面曲率に対する制御レベルを決定するように重み付けられている);点を定める境界内の表面/曲線の曲率は重みを持つ制御点の位置決め、数および相対的重み付けによって決定される(図16Aは、境界を定める開始(sP1)点と終了(eP4)点との間に制御点としてc1P2およびc2P3を示している。(濃い灰色の実線の)曲線の経路は境界を定める点と制御点との相互関係によって描かれている。図16Aは、sP1とeP4との間の0.5の点に曲線を示している。この0.5における曲線の位置は(より大きな)破線に沿った0.5の位置によって与えられ、これは両方の点線に沿った道の0.5の点の間の接続として定められ、(次に)これはsP1→c1P2とc1P2→c2P3との間の距離の0.5の点(左側の点線が得られる)とc1P2→c2P3とc2P3→eP4との間の距離の0.5(右側の点線が得られる)との接続として定められている)、および
c)いくつかの表面/曲線では、曲率はノット点に近い場合に表面の曲率を制約する「ノット」によっても制御される(この数学の一分野およびこのように表面を記述するその関連用語は木造船建築から生まれたものであり、ここでは、船体のリブを構成するように延び、かつ船にその外部船体形状を与える各梁の曲率は、木材の中の節によって作り出される梁における硬い領域を考慮しながら、湿らせた梁をそれぞれ両端に固定し、かつウェイトを吊るして梁の曲がり具合を制御することによって生成される)
等値面は、関連する接続情報により3D点または頂点によって作成される表面である。接続情報は、ソフトウェアにどの点およびどの順序でこれらの点を使用してポリゴン表面を構築することができるかを教える。ポリゴン表面は3つ以上の頂点から構築することができるが、ポリゴン表面が3つの頂点のみから構築されている、言い換えると三角形として構築されている場合、全てのポリゴンが平らであるということが保証される(図16Bに示されている表面の三角形分割表示については図16C~図16Eを参照)。
CADモデルで表される三角形分割表面とパラメトリックにモデル化された表面との違いは些細なものではないが、表面を3Dモデルでどのように表すか、および点の移動がモデルに対して何をもたらすかは基本的なことである。単一の点をNURBS表面などのパラメトリック表面において移動させると、同じ形状の三角形分割表面において単一の点を移動させる場合とは非常に異なる結果が達成される(図16Cおよび図16Eと比較して図16Bを参照)。図16Eは、図16Bにおけるパラメトリック(NURBS)表面と形状において比較可能な高解像度三角形分割表面表現を示す。図16Cは、(図16Dおよび図16Eに図示されているような)同じ形状の低解像度の三角形分割表面であり、ここでは、単一の点を動かした場合の当該装置の表面に対する効果が図16Dおよび図16Eに示されている高解像度の三角形分割表面の場合よりも容易に観察される(表面欠陥、表面に穴が形成される可能性およびスパイク状の形態の効果は、高解像度の三角形分割表面において同じである)。
本開示は、元のベース形状をターゲット形状に一致させるように変更させる方法を提供する。本明細書に詳述されている有限要素方法および多変量スプライン法ならびにワーピング補間関数法などの、これを達成するためのいくつかの方法が存在する。有限要素方法および多変量スプライン法はどちらも通常は、メッシュにおいて三角形のそれぞれを構成している点の連立方程式を解いてメッシュの全体的歪みを計算することに基づいている。これにより直ちにコンピュータでの計算が重くなり、従って、幾何学的に正確な解剖学的装置または生物医学装置モデルなどにおいてメッシュが多くの点を有する場合に遅くなる。対照的に、ワーピング補間関数法は三角形分割を必要としないため計算するのがさらに速くなる。
次に、本開示の様々な実施形態について説明する。CADワークフローは、以下のユーザとの対話によって開始する。
1)ユーザはどんな種類の処置をモデル化するかを定める。この例では、以下の処置セットがユーザによる選択のために利用可能である。
a.骨断片の再位置合わせを行わないプレートによる骨折固定
b.骨断片の再位置合わせを行うプレートによる骨折固定
c.骨断片の再位置合わせを行わない髄内(IM)釘による骨折固定
d.骨断片の再位置合わせを行う髄内(IM)釘による骨折固定
e.単一の関節表面置換
f.関節全置換術
g.外部副木、支持装具または矯正器具
h.頸部プレート
i.椎体固定のための椎体間ケージ
j.フランジを有するプレート
k.真の3Dカスタム
2)ユーザは異常な体の一部の3D再構築物をソフトウェアにインポートする。この再構築は、体の一部の境界表示等値面を生成するためのグレースケール閾値処理済DICOMデータ(通常はCTまたはMRI)により得られる。
3)ユーザは、カスタマイズされるベース装置のパラメトリックまたは等値面(三角形分割頂点)表示および射影のための当該装置の関連する予め定められた点(適用可能であれば)をソフトウェアにインポートする。
椎間板の高さが減少する慢性椎間板変性の事例では、この位置で脊髄から出ている神経根に圧力が加わる可能性がある。この圧力により、痺れ、神経が終了する場所にある組織における刺痛および/または脊椎の周りの局所化疼痛が生じる可能性がある。
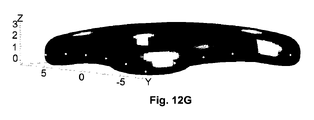
図12A~図12Hは、2つの頸椎を固定させる意図でそれらを安定化させるために使用される前頸部プレートへの本方法の適用を示す。そのような事例では、椎間板の高さの減少により、孔を介して脊柱管から側方に出ている神経の圧迫痛が生じる可能性がある。椎骨に取り付けられる図12Aに示すような前方プレートにより、変性位置を安定化させ、椎間板の高さを回復させ、かつ神経出口を広くするのを助けることができる。図12Aに示すように、前頸部プレートは椎体に取り付けられることが多く、ネジによって適所に保持される。これらのネジは椎体の皮質骨(外殻)を通って椎体内部の海綿状すなわちスポンジ状の骨の中まで入る。
椎体間ケージは椎体間の高さを回復させるための「スペーサ」として使用される。中心の穴は、時には骨形成タンパク質(骨成長の刺激を助けるためのBMP)または脱ミネラル化骨と共に使用される骨「粉砕物」(自家移植片または同種移植片;「粉砕された」骨)などの材料で「充填」されることが多い。これらは全て、固定の成功の確率を最大化することを目指しており、ここでは骨が対向する椎体の2つの終板から成長して中央で合体する。但し、固定は保証されていない(図13Bの1および2を参照、13Bの2における2つの椎体の間の白色の線は固定の欠如を示している)。
a)当該装置と終板との接触表面積を最大化し、それにより終板骨が弱ってケージを椎体に中に沈下させ得る高い応力(応力=力/領域)の「ホットスポット」を最小化し、
b)当該プレートが周囲の患者解剖学的構造内の所望の/計画された場所の中に自然に「入り込む」ことで、当該プレートのより良好な位置決めが可能になり、これにより、ケージ沈下の可能性を再び増加させ得るケージに加えられる計画されていない「軸外」荷重の発生が減少する
からである。


a)当該装置の質量中心であるグローバルx,y,z=0,0,0への平行移動(方程式(1)および方程式(2)と同様)、および
b)点(1)および(3)*-1の法線ベクトルが位置合わせされるような点(3)の周りでの回転
によってグローバル座標系軸に自動的に位置合わせされる。
これは以下の方程式によって達成される。



この例では、当該装置のソース点を定める。これらのソース点は元の装置ファイルに付随するファイルに格納されているか、あるいは、当該装置の境界ボックスから計算された標準化された格子によってソース点を定めることができる(図6Aの605を参照)。さらなる選択肢として、点(3)と同一面内にある点の等距離サブセットとしてソース点を定めることができ、あるいは、グラフィカルユーザインタフェースとの対話を介してユーザがソース点を選択することができる。格子アルゴリズムはPC軸の極限にある点および中間点を含む(図6Aの605を参照)。
この例では、装置をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある質量中心と位置合わせする(上記方程式(1)~(10)および図11Aおよび図11Bを参照)。次いで、図11Cに示すようにユーザは予め定められ測定値を入力する。本方法は、各測定レベルにおいて予め定められた一般的な装置設計格子をユーザによって定められた測定値に一致するように変更し、放射基底補間フィールドを確立する(図11Dおよび図11E)。
この例では、本方法は、装置をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある当該装置の質量中心と位置合わせする。次いで、ユーザは、予め定められた曲線パラメータ/測定値を入力する。これらのパラメータは、曲線半径の形態または所望の曲線周囲上の3点の形態、またはその上に当該装置の2つの端部が置かれている平坦な表面/平面からの曲線の中間(高い)点における距離の形態であってもよい。
当該装置をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある質量中心と位置合わせする。ターゲット形態をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある質量中心と位置合わせする。装置およびターゲットが所望どおりに位置合わせされ/装置ソース点のターゲット形態への有効な射影を達成するように、装置/ターゲット位置および位置合わせを必要に応じて調節する(図13Hを参照)。
当該装置をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある質量中心と位置合わせする。この場合、当該装置は、当該ベース装置として「正常な」子供の頭部の形状を有する斜頭症「ヘルメット」である。この「正常な」頭部形状は、子供の頭部形状のデータベースから取得することができ、それは斜頭の子供の頭部形状に年齢および性別的に一致し、「ソース」形態としての役割を果たす。「ターゲット」形態をグローバルx,y,z=0,0,0(装置のx軸=長さ、y軸=幅、z軸=深さである)にある質量中心と位置合わせする。本実施形態では、ターゲット形態は子供の斜頭形状である。
本開示の方法は、多くの異なる産業において多くの用途を有し得る。医療分野に関しては、少なくとも以下の用途が想定される。
a)骨断片の再位置合わせを行わないか最小の骨断片の再位置合わせを行うプレートによる骨折固定
例:1)中手骨の骨折および小さいプレートによる固定、および
例:2)下顎関節頭の骨折
b)骨断片の再位置合わせを行う骨折または骨切り術後のプレートによる固定
例:1)図6A~図6Cに示す橈骨の事例
c)骨断片の再位置合わせを行わないか最小の骨断片の再位置合わせを行う髄内(IM)釘による骨折固定
例:1)頭頸部構成要素を含む大腿の髄内(IM)釘、および
例:2)上腕骨のIM釘
d)骨断片の再位置合わせを行う髄内(IM)釘による骨折または骨切り術後の固定
例:1)大腿の髄内(IM)釘、および
例:2)上腕骨のIM釘
e)単一の関節表面置換
例:1)股関節の大腿骨頭、および
2)上腕骨の頭部
f)関節全置換術
例:1)股関節
例:2)膝
例:3)足首、および
例:4)肩
g)椎体間スペーサ
例:1)頸部/胸部/腰部の椎体間スペーサ
h)外部副木、支持装具または矯正器具
例:1)指用副木1、指用副木2
例:2)アンクルブレース、および
例:3)足矯正器具
i)フランジを有するプレートまたはカップ
例:1)フランジを有する寛骨臼カップ、および
例:2)フランジを有するプレート
j)人工補綴物ソケット
k)斜頭症ヘルメット
Claims (15)
- 一般的な装置のデジタルモデルを修正するための方法であって、前記方法は、
一般的なベース部分の第1のデジタルファイルをインポートする工程と、
ターゲット形状の第2のデジタルファイルをインポートする工程と、
前記ターゲット形状に基づいて前記第1のデジタルファイルを修正してカスタマイズされた装置のデジタルモデルを生成する工程であって、前記修正は、
前記一般的なベース部分と前記ターゲット形状との間の射影に基づいてワーピング補間関数を決定することであって、前記射影は、前記一般的なベース部分に関連づけられたソース点集合の相対位置、および前記ターゲット形状に関連づけられた同じ点の相対位置を決定し、前記一般的なベース部分に関連づけられたソース点集合は、対応するソース点位置を有し、前記ターゲット形状に関連づけられた同じ点は、対応するターゲット点位置を有すること、および
前記ワーピング補間関数を前記一般的なベース部分の全ての点に適用して前記カスタマイズされた装置のデジタルモデルを生成することであって、前記カスタマイズされた装置のデジタルモデルは、前記ターゲット形状に適合するように構成されていること
を含む工程と、
を含む、方法。 - 前記一般的なベース部分の第1のデジタルファイルは、予め定められたソース点位置のセットに関連づけられる、請求項1に記載の方法。
- 前記方法は、前記ターゲット形状に基づいて、前記一般的なベース部分に関連づけられたソース点位置を計算する工程をさらに含み、
前記射影は、前記ターゲット形状から前記一般的なベース部分に前記ターゲット点位置を射影して前記ソース点位置を計算することを含む、
請求項1に記載の方法。 - 前記射影は、
前記一般的なベース部分から前記ターゲット形状に前記ソース点位置を射影して前記ターゲット点位置を計算すること
を含む、請求項1に記載の方法。 - 前記カスタマイズされた装置のデジタルモデルをコンピュータ支援製造(CAM)装置にエクスポートするさらなる工程であって、前記CAM装置は、エクスポートされたモデルに基づいて前記カスタマイズされた装置を製造するように構成されており、前記CAM装置は、3D印刷のための付加製造装置、コンピュータ数値制御(CNC)マシンフライス加工装置、CNC旋盤、CNCルータ、CNC鋸、液圧プレス、およびCNC曲げ加工機からなる群から選択される工程
を含む、請求項1乃至4のいずれか1項に記載の方法。 - 前記ワーピング関数は、さらに入力パラメータのセットに基づいており、前記入力パラメータのセットは、前記カスタマイズされた装置が適合しなければならない1つ以上の寸法、倍率、および空間の点または次元のうちの少なくとも1つを含む、請求項1乃至5のいずれか1項に記載の方法。
- 前記ターゲット形状は、
(i)体の一部の理想的な骨モデル、
(ii)体の一部のサーフェススキャン、および
(iii)1つ以上のパラメータのセットであって、前記1つ以上のパラメータのセットは、長さ寸法、および倍率のうちの少なくとも1つを含む、パラメータのセット
から選択される、請求項1乃至6のいずれか1項に記載の方法。 - 前記一般的なベース部分は、副木、プレート、ロッド、カップ、補綴物、ブレース、埋め込み物、矯正器具、ヘルメット、およびケージからなる群から選択される、請求項1乃至7のいずれか1項に記載の方法。
- 前記カスタマイズされた装置は、ブレース、副木、切断ガイド、冶具、補綴物、カラー、ヘルメット、外科用プレート、ロッド、カップ、および椎体間スペーサからなる群から選択される、請求項1乃至8いずれか1項に記載の方法。
- 前記第1のデジタルファイルは三角形分割頂点境界表現であり、前記修正は、前記ワーピング補間関数を前記一般的なベース部分の全ての頂点に適用する、請求項1乃至9いずれか1項に記載の方法。
- 一般的な医療装置を修正して患者用のカスタマイズされた医療装置を製造するためのシステムであって、前記システムは、
コンピュータ支援製造(CAM)装置と、
プロセッサと、
前記プロセッサ上での実行のためのコンピュータプログラムを格納するためのメモリであって、前記コンピュータプログラムは、
一般的なベース部分の第1のデジタルファイルをインポートすることと、
ターゲット形状の第2のデジタルファイルをインポートすることと、
前記ターゲット形状に基づいて前記第1のデジタルファイルを修正してカスタマイズされた装置のデジタルモデルを生成することであって、前記修正は、
前記一般的なベース部分と前記ターゲット形状との間の射影に基づいてワーピング補間関数を決定することであって、前記射影は、前記一般的なベース部分に関連づけられたソース点集合の相対位置、および前記ターゲット形状に関連づけられた同じ点の相対位置を決定し、前記一般的なベース部分に関連づけられたソース点集合は、対応するソース点位置を有し、前記ターゲット形状に関連づけられた同じ点は、対応するターゲット点位置を有すること、
前記ワーピング補間関数を前記一般的なベース部分の全ての点に適用して前記カスタマイズされた装置のデジタルモデルを生成することであって、前記カスタマイズされた装置のデジタルモデルは、前記ターゲット形状に適合するように構成されていること、および
前記医療装置のカスタマイズされたデジタルモデルを前記コンピュータ支援製造(CAM)装置にエクスポートするためのさらなる命令であって、前記CAM装置は、エクスポートされカスタマイズされたデジタルモデルに基づいて前記医療装置を製造するように構成されており、前記CAM装置は、3D印刷のための付加製造装置、コンピュータ数値制御(CNC)マシンフライス加工装置、CNC旋盤、CNCルータ、CNC鋸、液圧プレス、およびCNC曲げ加工機からなる群から選択されること
のための命令を含む、メモリと、
を備える、システム。 - 前記第1のデジタルファイルは三角形分割頂点境界表現であり、前記修正は、前記ワーピング補間関数を前記一般的なベース部分の全ての頂点に適用する、請求項11に記載のシステム。
- 前記一般的なベース部分の第1のデジタルファイルは、前記一般的なベース部分のための設計マスタファイルである、請求項11または請求項12のどちらか1項に記載のシステム。
- 前記ワーピング関数は、さらに入力パラメータのセットに基づいており、前記入力パラメータのセットは、前記医療装置が適合しなければならない1つ以上の寸法、倍率、および空間の点または次元のうちの少なくとも1つを含む、請求項11乃至13のいずれか1項に記載のシステム。
- 前記ターゲット形状は、
(i)体の一部の理想的な骨モデル、
(ii)体の一部のサーフェススキャン、および
(iii)1つ以上のパラメータのセットであって、前記1つ以上のパラメータのセットは、長さ寸法、および倍率のうちの少なくとも1つを含む、パラメータのセット
から選択され、
さらに、前記一般的なベース部分は、副木、プレート、ロッド、カップ、補綴物、ブレース、埋め込み物、矯正器具、ヘルメット、およびケージからなる群から選択される、請求項11乃至14のいずれか1項に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2016900216 | 2016-01-25 | ||
| AU2016900216A AU2016900216A0 (en) | 2016-01-25 | Method and system for designing and fabricating a customised device | |
| PCT/AU2017/050056 WO2017127887A1 (en) | 2016-01-25 | 2017-01-25 | Method and system for desi gni ng and fabr icati ng a customi sed device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019511068A JP2019511068A (ja) | 2019-04-18 |
| JP2019511068A5 JP2019511068A5 (ja) | 2020-03-05 |
| JP7141706B2 true JP7141706B2 (ja) | 2022-09-26 |
Family
ID=59396792
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018557165A Active JP7141706B2 (ja) | 2016-01-25 | 2017-01-25 | カスタマイズされた装置を設計および作製するための方法およびシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11331205B2 (ja) |
| EP (1) | EP3407817B1 (ja) |
| JP (1) | JP7141706B2 (ja) |
| AU (2) | AU2017212147B2 (ja) |
| CA (1) | CA3012390C (ja) |
| WO (1) | WO2017127887A1 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10710356B2 (en) * | 2017-03-30 | 2020-07-14 | Cranial Technologies, Inc. | Apparatus for point of service manufacture of custom cranial remodeling devices |
| US10514680B2 (en) * | 2017-07-31 | 2019-12-24 | General Electric Company | System and method for controlling an additive manufacturing system |
| US10314597B2 (en) | 2017-08-24 | 2019-06-11 | Limacorporate S.P.A. | Ankle arthroplasty systems and methods |
| DE102017131323A1 (de) * | 2017-12-27 | 2019-06-27 | Mecuris GmbH | Computerimplementiertes Verfahren und System zur Herstellung einer orthopädischen Versorgung |
| KR20210124957A (ko) * | 2018-10-12 | 2021-10-15 | 메사추세츠 인스티튜트 오브 테크놀로지 | 재료들의 탄성 변형 엔지니어링 |
| US11337798B2 (en) * | 2018-12-06 | 2022-05-24 | Colorado Seminary Which Owns And Operates The University Of Denver | Optimization of replacement heart valve leaflets |
| US11986251B2 (en) | 2019-09-13 | 2024-05-21 | Treace Medical Concepts, Inc. | Patient-specific osteotomy instrumentation |
| WO2021051098A1 (en) | 2019-09-13 | 2021-03-18 | Inmotus Medical Llc | Patient-specific surgical methods and instrumentation |
| IT201900022866A1 (it) | 2019-12-03 | 2021-06-03 | Antonio Puce | Metodo per la realizzazione di un supporto ortopedico. |
| EP3831323A1 (en) * | 2019-12-05 | 2021-06-09 | Universiteit Antwerpen | Improved implantable plate and method of manufacturing thereof |
| CN111241707B (zh) * | 2020-02-14 | 2023-07-07 | 中国航空制造技术研究院 | 一种复杂曲面五轴数控加工全路径铣削力的计算方法 |
| US11507056B1 (en) * | 2020-04-06 | 2022-11-22 | Lockheed Martin Corporation | System and method for three-dimensional (3D) computer-aided manufacturing (CAM) of an ensemble of pilot equipment and garments |
| EP4157117A1 (en) * | 2020-05-29 | 2023-04-05 | Materialise NV | Implant for correcting a defect of a bone structure with navigation fiducials |
| US11760029B2 (en) * | 2020-06-23 | 2023-09-19 | Continuous Composites Inc. | Systems and methods for controlling additive manufacturing |
| FI20205808A1 (en) * | 2020-08-20 | 2022-02-21 | Taika3D Oy | Assistive device and procedure for designing an orthotic or prosthetic product |
| KR102413390B1 (ko) * | 2020-10-06 | 2022-06-30 | 주식회사 코렌텍 | 맞춤형 거골 임플란트 |
| CZ2020636A3 (cs) * | 2020-11-27 | 2022-06-08 | Invent Medical Group, S.R.O. | 3D tištěná ortéza pro hlezno a nohu a proces její výroby |
| CN113656909B (zh) * | 2021-08-05 | 2023-09-15 | 大明重工有限公司 | 一种折弯仿真及模具估价方法 |
| AU2021221798A1 (en) * | 2021-08-25 | 2023-03-16 | 3Dmorphic Pty Ltd | Integrally formed medical devices |
| EP4392989A1 (en) * | 2021-08-25 | 2024-07-03 | 3Dmorphic PTY Ltd | A method and medical implant |
| US12064850B2 (en) | 2021-12-30 | 2024-08-20 | Saint-Gobain Abrasives, Inc. | Abrasive articles and methods for forming same |
| JP7497895B2 (ja) | 2022-07-25 | 2024-06-11 | 株式会社3D Printing Corporation | 形状変更システム、形状変更方法、プログラム、及び製造実行システム |
| CN115530813B (zh) * | 2022-10-20 | 2024-05-10 | 吉林大学 | 用于人体上身多关节三维运动测试分析的标记系统 |
| CN115998491B (zh) * | 2023-03-24 | 2023-07-28 | 北京爱康宜诚医疗器材有限公司 | 椎间融合器 |
| CN118154544A (zh) * | 2024-03-12 | 2024-06-07 | 深圳市金洲精工科技股份有限公司 | 刀具检测方法、装置、计算机设备和存储介质 |
| CN118121302B (zh) * | 2024-05-07 | 2024-09-03 | 北京理贝尔生物工程研究所有限公司 | 治疗胫骨平台骨折解剖型钢板的设计方法及内固定装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060094951A1 (en) | 2003-06-11 | 2006-05-04 | David Dean | Computer-aided-design of skeletal implants |
| JP2007313852A (ja) | 2006-05-29 | 2007-12-06 | Mitsubishi Electric Engineering Co Ltd | 金型修正システム |
| JP2010211680A (ja) | 2009-03-12 | 2010-09-24 | Honda Motor Co Ltd | モデルデータの修正方法 |
| US20110282473A1 (en) | 2008-04-30 | 2011-11-17 | Otismed Corporation | System and method for image segmentation in generating computer models of a joint to undergo arthroplasty |
| JP2012518519A (ja) | 2009-02-25 | 2012-08-16 | モハメッド ラシュワン マーフォーズ | カスタマイズされた整形外科用インプラント及び関連方法並びに変形可能な関節テンプレート |
| US20120230566A1 (en) | 1999-08-11 | 2012-09-13 | Case Western Reserve University | Producing a three dimensional model of an implant |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7702380B1 (en) * | 1999-11-03 | 2010-04-20 | Case Western Reserve University | System and method for producing a three-dimensional model |
| US6608631B1 (en) * | 2000-05-02 | 2003-08-19 | Pixar Amination Studios | Method, apparatus, and computer program product for geometric warps and deformations |
| US8457930B2 (en) * | 2009-04-15 | 2013-06-04 | James Schroeder | Personalized fit and functional designed medical prostheses and surgical instruments and methods for making |
| US9642633B2 (en) * | 2010-06-29 | 2017-05-09 | Mighty Oak Medical, Inc. | Patient-matched apparatus and methods for performing surgical procedures |
| WO2012027185A1 (en) * | 2010-08-25 | 2012-03-01 | Siemens Corporation | Semi-automatic customization of plates for internal fracture fixation |
| US10130378B2 (en) * | 2011-05-11 | 2018-11-20 | The Cleveland Clinic Foundation | Generating patient specific instruments for use as surgical aids |
| BR112014001295A2 (pt) * | 2011-07-20 | 2017-02-21 | Smith & Nephew Inc | sistemas e métodos para otimizar o ajuste de um implante à anatomia |
| US10610299B2 (en) * | 2011-12-14 | 2020-04-07 | Stryker European Holdings I, Llc | Technique for generating a bone plate design |
| US9198770B2 (en) * | 2013-07-31 | 2015-12-01 | Globus Medical, Inc. | Artificial disc devices and related methods of use |
| CN111991122B (zh) * | 2013-10-15 | 2024-04-09 | 穆罕默德·拉什万·马赫福兹 | 骨骼重建和骨外科植入物 |
| US10460508B2 (en) * | 2014-06-12 | 2019-10-29 | Siemens Healthcare Gmbh | Visualization with anatomical intelligence |
-
2017
- 2017-01-25 AU AU2017212147A patent/AU2017212147B2/en active Active
- 2017-01-25 CA CA3012390A patent/CA3012390C/en active Active
- 2017-01-25 JP JP2018557165A patent/JP7141706B2/ja active Active
- 2017-01-25 US US16/072,790 patent/US11331205B2/en active Active
- 2017-01-25 WO PCT/AU2017/050056 patent/WO2017127887A1/en active Application Filing
- 2017-01-25 EP EP17743489.1A patent/EP3407817B1/en active Active
-
2022
- 2022-03-08 AU AU2022201602A patent/AU2022201602B2/en active Active
- 2022-04-05 US US17/658,030 patent/US11963889B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120230566A1 (en) | 1999-08-11 | 2012-09-13 | Case Western Reserve University | Producing a three dimensional model of an implant |
| US20060094951A1 (en) | 2003-06-11 | 2006-05-04 | David Dean | Computer-aided-design of skeletal implants |
| JP2007313852A (ja) | 2006-05-29 | 2007-12-06 | Mitsubishi Electric Engineering Co Ltd | 金型修正システム |
| US20110282473A1 (en) | 2008-04-30 | 2011-11-17 | Otismed Corporation | System and method for image segmentation in generating computer models of a joint to undergo arthroplasty |
| JP2012518519A (ja) | 2009-02-25 | 2012-08-16 | モハメッド ラシュワン マーフォーズ | カスタマイズされた整形外科用インプラント及び関連方法並びに変形可能な関節テンプレート |
| JP2010211680A (ja) | 2009-03-12 | 2010-09-24 | Honda Motor Co Ltd | モデルデータの修正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2022201602A1 (en) | 2022-03-31 |
| US11963889B2 (en) | 2024-04-23 |
| WO2017127887A8 (en) | 2017-09-08 |
| AU2022201602B2 (en) | 2024-02-15 |
| US20210205099A1 (en) | 2021-07-08 |
| AU2017212147B2 (en) | 2021-12-09 |
| EP3407817B1 (en) | 2024-03-13 |
| WO2017127887A9 (en) | 2019-10-10 |
| CA3012390A1 (en) | 2017-08-03 |
| EP3407817A1 (en) | 2018-12-05 |
| EP3407817A4 (en) | 2019-12-25 |
| US11331205B2 (en) | 2022-05-17 |
| JP2019511068A (ja) | 2019-04-18 |
| CA3012390C (en) | 2023-02-21 |
| US20220226130A1 (en) | 2022-07-21 |
| WO2017127887A1 (en) | 2017-08-03 |
| AU2017212147A1 (en) | 2018-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7141706B2 (ja) | カスタマイズされた装置を設計および作製するための方法およびシステム | |
| EP2709540B1 (en) | Generating patient specific instruments for use as surgical aids | |
| US9474582B2 (en) | Personalized orthopedic implant CAD model generation | |
| US7837621B2 (en) | Computer-aided bone distraction | |
| Yuan et al. | Design, development and clinical validation of computer-aided surgical simulation system for streamlined orthognathic surgical planning | |
| JP2015531253A (ja) | 個別患者向けインプラント技術 | |
| US20040068187A1 (en) | Computer-aided orthopedic surgery | |
| US20060094951A1 (en) | Computer-aided-design of skeletal implants | |
| Green et al. | A practical guide to image processing in the creation of 3D models for orthopedics | |
| Chen et al. | A semi-automatic computer-aided method for surgical template design | |
| Vitković et al. | The parametric model of the human mandible coronoid process created by method of anatomical features | |
| Balwan et al. | Development of patient specific knee joint implant | |
| Stojkovic et al. | Personalized orthopedic surgery design challenge: human bone redesign method | |
| Stojković et al. | User defined geometric feature for the creation of the femoral neck enveloping surface | |
| Soni et al. | Design and analysis of customized fixation plate for femoral shaft | |
| WO2013177675A1 (en) | Post-manufacturing inspection of machined object | |
| Vitković et al. | Contact Surface Model Parameterization of the Extra-Articular Distal Humerus Plate | |
| Kallemeyn et al. | Advancements in spine FE mesh development: toward patient-specific models | |
| Lin et al. | [Retracted] Application of Digital Orthopedic Technology in Orthopedic Trauma | |
| Sciortino et al. | Statistical shape modelling as a tool for medical reverse engineering | |
| DeVries et al. | IA-FEMESH: anatomic FE models—a check of mesh accuracy and validity | |
| Bagaria et al. | Using 3D-printed Patient-optimized Surgical Tools (3D POST) for complex hip and knee arthroplasty | |
| WO2024098158A1 (en) | Spine correction appliances, and systems and methods for their manufacture | |
| CN118141514A (zh) | 针对膝关节置换的股骨畸形下肢三维模型构建方法和装置 | |
| Vitkovic et al. | Extra-Articular Distal Humerus Plate 3D Model Creation by Using the Method of Anatomical Features. Materials 2023, 16, 5409 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180920 |
|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20180921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210316 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210614 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210816 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211102 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7141706 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |