JP7128329B2 - クレーン運転補助システムおよびクレーン運転補助方法 - Google Patents
クレーン運転補助システムおよびクレーン運転補助方法 Download PDFInfo
- Publication number
- JP7128329B2 JP7128329B2 JP2021112114A JP2021112114A JP7128329B2 JP 7128329 B2 JP7128329 B2 JP 7128329B2 JP 2021112114 A JP2021112114 A JP 2021112114A JP 2021112114 A JP2021112114 A JP 2021112114A JP 7128329 B2 JP7128329 B2 JP 7128329B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- drone
- control
- camera
- crane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Control And Safety Of Cranes (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
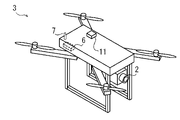
2 カメラ
3 ドローン
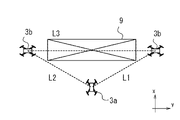
3a 主ドローン
3b 従ドローン
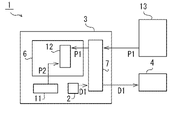
4 モニタ
5 運転室
6 制御機構
7 通信機構
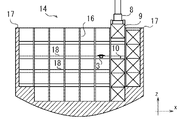
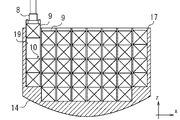
8 スプレッダ
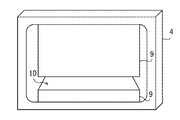
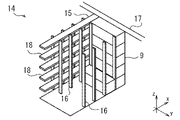
9 コンテナ
10 コンテナ載置面
11 位置情報取得機構
12 取得部
13 管理システム
14 コンテナ船
15 隔壁
16 セルガイド
17 甲鈑
18 通路
19 側壁
P1 (コンテナ載置面の)位置情報
P2 (ドローンの)位置情報
D1 画像データ
x 短手方向
y 長手方向
z 上下方向
L1、L2、L3 相対距離
Claims (7)
- コンテナクレーンのスプレッダにより荷役されるコンテナを撮影するカメラと、前記コンテナクレーンの運転室に設置されて前記カメラによる撮影画像が表示されるモニタとを備えたクレーン運転補助システムにおいて、
周囲との距離を測定する複数の距離センサと前記カメラとが設置されるドローンとこのドローンを制御する制御機構とを備えていて、
荷役対象の前記コンテナが載置されるコンテナ載置面の近傍に前記ドローンを待機させて、荷役対象の前記コンテナの側面を前記ドローンの前記カメラで撮影させる撮影制御と、
前記距離センサに周囲の障害物までの距離を測定させてこの距離が所定の値よりも小さくならない状態に前記ドローンの位置を制御する衝突防止制御とを行なう構成を前記制御機構が有していて、
前記制御機構が撮影制御と衝突防止制御とを同時並行で行う構成を有することを特徴とするクレーン運転補助システム。 - コンテナクレーンのスプレッダにより荷役されるコンテナを撮影するカメラと、前記コンテナクレーンの運転室に設置されて前記カメラによる撮影画像が表示されるモニタとを備えたクレーン運転補助システムにおいて、
前記カメラが設置されるドローンとこのドローンを制御する制御機構とを備えていて、
荷役対象の前記コンテナが載置されるコンテナ載置面の近傍に前記ドローンを待機させて、荷役対象の前記コンテナの側面を前記ドローンの前記カメラで撮影させる撮影制御と、
前記ドローンが自身の位置情報を取得する位置情報取得機構を有していて、前記コンテナ載置面の位置情報と前記ドローンの位置情報とを取得する取得部を前記制御機構が有していて、前記取得部で得られる情報に基づいて前記コンテナ載置面の近傍に前記ドローンを移動させる移動制御と、
コンテナヤードに設置されていて前記コンテナ載置面の位置情報を格納する管理システムから取得される前記コンテナ載置面の位置情報、および前記管理システムに予め記憶されているコンテナ船の側壁の位置の情報に基づき、前記コンテナ載置面の長手方向の側面を撮影できる位置に前記ドローンが移動可能か否かを判断して、前記ドローンが移動可能である場合は前記コンテナの長辺方向の側面を撮影する長手方向撮影制御を選択して、前記ドローンが移動不可能である場合は前記コンテナの短辺方向の側面を撮影する短辺方向撮影制御を選択する選択制御とを行う構成を前記制御機構が有することを特徴とするクレーン運転補助システム。 - 前記選択制御により前記ドローンの移動位置が決定された後に、この移動位置に向けて前記移動制御により前記ドローンを移動させる構成を前記制御機構が有する請求項2に記載のクレーン運転補助システム。
- コンテナ船の前後方向で船倉を区切る隔壁の内部に通路が予め形成されていて、
前記制御機構が、前記通路の中で前記ドローンを飛行させる構成を有する請求項1~3のいずれかに記載のクレーン運転補助システム。 - 前記制御機構が、コンテナ船の甲鈑よりも低い船倉の中でのみ前記ドローンを飛行させて、甲鈑よりも高い位置に前記ドローンが侵入することを制限する空域制限制御を行う構成を有していて、
前記制御機構で取得される前記コンテナ載置面の位置情報が前記甲鈑よりも高い位置であった場合、前記モニタの画像を前記ドローンの前記カメラから作業員のカメラに自動で切り替える制御を行う構成を有する請求項1~4のいずれかに記載のクレーン運転補助システム。 - コンテナクレーンのスプレッダにより荷役されるコンテナをカメラで撮影して、この撮影画像を前記コンテナクレーンの運転室のモニタに表示するクレーン運転補助方法において、
周囲との距離を測定する複数の距離センサと前記カメラとをドローンに設置して、荷役対象の前記コンテナが載置されるコンテナ載置面の近傍に前記ドローンを待機させて、荷役対象の前記コンテナの側面を前記ドローンの前記カメラで撮影させる撮影制御と、
前記距離センサに周囲の障害物までの距離を測定させてこの距離が所定の値よりも小さくならない状態に前記ドローンの位置を制御する衝突防止制御とを行う構成を有するとともに、
撮影制御と衝突防止制御とを同時並行で行う構成を有することを特徴とするクレーン運転補助方法。 - コンテナクレーンのスプレッダにより荷役されるコンテナをカメラで撮影して、この撮影画像を前記コンテナクレーンの運転室のモニタに表示するクレーン運転補助方法において、
前記カメラをドローンに設置して、荷役対象の前記コンテナが載置されるコンテナ載置面の近傍に前記ドローンを待機させて、荷役対象の前記コンテナの側面を前記ドローンの前記カメラで撮影させる撮影制御と、
荷役対象の前記コンテナが載置されるコンテナ載置面の位置情報と前記ドローンの位置情報とに基づいて前記コンテナ載置面の近傍に前記ドローンを移動させる移動制御と、
コンテナヤードに設置されていて前記コンテナ載置面の位置情報を格納する管理システムから取得される前記コンテナ載置面の位置情報、および前記管理システムに予め記憶されているコンテナ船の側壁の位置の情報に基づき、前記コンテナ載置面の長手方向の側面を撮影できる位置に前記ドローンが移動可能か否かを判断して、前記ドローンが移動可能である場合は前記コンテナの長辺方向の側面を撮影する長手方向撮影制御を選択して、前記ドローンが移動不可能である場合は前記コンテナの短辺方向の側面を撮影する短辺方向撮影制御を選択する選択制御とを行うことを特徴とするクレーン運転補助方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021112114A JP7128329B2 (ja) | 2018-03-13 | 2021-07-06 | クレーン運転補助システムおよびクレーン運転補助方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018045805A JP6910316B2 (ja) | 2018-03-13 | 2018-03-13 | クレーン運転補助システムおよびクレーン運転補助方法 |
| JP2021112114A JP7128329B2 (ja) | 2018-03-13 | 2021-07-06 | クレーン運転補助システムおよびクレーン運転補助方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018045805A Division JP6910316B2 (ja) | 2018-03-13 | 2018-03-13 | クレーン運転補助システムおよびクレーン運転補助方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021169372A JP2021169372A (ja) | 2021-10-28 |
| JP7128329B2 true JP7128329B2 (ja) | 2022-08-30 |
Family
ID=67992263
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018045805A Active JP6910316B2 (ja) | 2018-03-13 | 2018-03-13 | クレーン運転補助システムおよびクレーン運転補助方法 |
| JP2021112114A Active JP7128329B2 (ja) | 2018-03-13 | 2021-07-06 | クレーン運転補助システムおよびクレーン運転補助方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018045805A Active JP6910316B2 (ja) | 2018-03-13 | 2018-03-13 | クレーン運転補助システムおよびクレーン運転補助方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP6910316B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7548749B2 (ja) * | 2020-07-30 | 2024-09-10 | 住友重機械搬送システム株式会社 | 自動クレーンシステム、及び自動クレーンシステムの制御方法 |
| JP7521359B2 (ja) * | 2020-09-29 | 2024-07-24 | コベルコ建機株式会社 | 遠隔操作支援装置及び遠隔操作支援システム |
| AU2021273629A1 (en) * | 2020-12-16 | 2022-06-30 | Aurora Flight Sciences Corporation, a subsidiary of The Boeing Company | Aircraft sensor system synchronization |
| CN114217606B (zh) * | 2021-11-15 | 2024-05-28 | 武汉港迪智能技术有限公司 | 一种门座起重机远程智能化控制系统及其方法 |
| JP7786549B2 (ja) * | 2022-03-11 | 2025-12-16 | 日本電気株式会社 | 制御装置、飛翔体、制御方法及びプログラム |
| JP7740801B2 (ja) * | 2022-04-08 | 2025-09-17 | 住友建機株式会社 | 道路機械 |
| JP7839694B2 (ja) * | 2022-06-14 | 2026-04-02 | 株式会社タダノインフラソリューションズ | 連続アンローダの状態監視・衝突防止方法および状態監視・衝突防止装置 |
| CN116924244A (zh) * | 2023-06-28 | 2023-10-24 | 三一海洋重工有限公司 | 起重机作业方法、起重机控制系统及集装箱起重机 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016204058A (ja) | 2015-04-15 | 2016-12-08 | 三井造船株式会社 | クレーン運転補助システムおよびクレーン運転補助方法 |
| JP2017078575A (ja) | 2015-10-19 | 2017-04-27 | エナジー・ソリューションズ株式会社 | 検査システム、及び検査方法 |
| JP2017087916A (ja) | 2015-11-09 | 2017-05-25 | 株式会社プロドローン | 無人移動体の操縦方法および無人移動体監視装置 |
| US20170345320A1 (en) | 2016-05-31 | 2017-11-30 | Dronomy Ltd. | Monitoring a Construction Site Using an Unmanned Aerial Vehicle |
| JP2017226259A (ja) | 2016-06-21 | 2017-12-28 | 株式会社日立製作所 | 管路施設点検飛行体と、それを用いた管路施設点検システム |
| JP2019048681A (ja) | 2017-09-08 | 2019-03-28 | 住友重機械搬送システム株式会社 | 荷役搬送システム、荷役搬送装置、および荷役搬送方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005138952A (ja) * | 2003-11-06 | 2005-06-02 | Mitsubishi Heavy Ind Ltd | ヤードクレーンの運転方法、および運転システム |
| JP2018188250A (ja) * | 2017-04-28 | 2018-11-29 | Jfeエンジニアリング株式会社 | 荷役機械の操作支援方法及び装置並びに保守作業支援方法及び装置 |
-
2018
- 2018-03-13 JP JP2018045805A patent/JP6910316B2/ja active Active
-
2021
- 2021-07-06 JP JP2021112114A patent/JP7128329B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016204058A (ja) | 2015-04-15 | 2016-12-08 | 三井造船株式会社 | クレーン運転補助システムおよびクレーン運転補助方法 |
| JP2017078575A (ja) | 2015-10-19 | 2017-04-27 | エナジー・ソリューションズ株式会社 | 検査システム、及び検査方法 |
| JP2017087916A (ja) | 2015-11-09 | 2017-05-25 | 株式会社プロドローン | 無人移動体の操縦方法および無人移動体監視装置 |
| US20170345320A1 (en) | 2016-05-31 | 2017-11-30 | Dronomy Ltd. | Monitoring a Construction Site Using an Unmanned Aerial Vehicle |
| JP2017226259A (ja) | 2016-06-21 | 2017-12-28 | 株式会社日立製作所 | 管路施設点検飛行体と、それを用いた管路施設点検システム |
| JP2019048681A (ja) | 2017-09-08 | 2019-03-28 | 住友重機械搬送システム株式会社 | 荷役搬送システム、荷役搬送装置、および荷役搬送方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019156575A (ja) | 2019-09-19 |
| JP2021169372A (ja) | 2021-10-28 |
| JP6910316B2 (ja) | 2021-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7128329B2 (ja) | クレーン運転補助システムおよびクレーン運転補助方法 | |
| US12406221B2 (en) | Enhanced systems, apparatus, and methods for positioning of an airborne relocatable communication hub supporting a plurality of wireless devices | |
| EP3033293B1 (en) | Method and system for automatically landing containers on a landing target using a container crane | |
| JP6481178B2 (ja) | クレーンの遠隔運転方法及びクレーンの遠隔運転装置 | |
| KR20200013352A (ko) | 도킹스테이션 부에서 드론을 원격 조종하여 자동 착륙하는 능동 유도형 도킹스테이션 및 겸용 차량 | |
| JP6925731B2 (ja) | 荷役搬送システム、荷役搬送装置、および荷役搬送方法 | |
| JP6309481B2 (ja) | クレーンの運転支援方法及びクレーンの運転支援装置 | |
| JP6971893B2 (ja) | コンテナターミナル及びその運用方法 | |
| KR102931591B1 (ko) | 비행체 자동 착륙 시스템 | |
| KR102463548B1 (ko) | 유선 드론을 이용한 부재 인식 시스템 | |
| JP2024168510A (ja) | 飛行体補助装置の昇降システム | |
| JP2025103189A (ja) | 監視システム | |
| JP6711554B2 (ja) | 無人搬送システム | |
| CN120122639A (zh) | 任务调度方法、任务执行方法、系统及自移动设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210727 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220818 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7128329 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |