JP7121925B2 - 連結装置、連結走行装置及び自律走行装置 - Google Patents
連結装置、連結走行装置及び自律走行装置 Download PDFInfo
- Publication number
- JP7121925B2 JP7121925B2 JP2018167985A JP2018167985A JP7121925B2 JP 7121925 B2 JP7121925 B2 JP 7121925B2 JP 2018167985 A JP2018167985 A JP 2018167985A JP 2018167985 A JP2018167985 A JP 2018167985A JP 7121925 B2 JP7121925 B2 JP 7121925B2
- Authority
- JP
- Japan
- Prior art keywords
- claw
- self
- connection
- propelled robot
- carriage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Landscapes
- Handcart (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
Description
例えば、特許文献1には、連結対象であるカゴ台車に連結部材である爪部材を引掛けて連結する連結装置が記載されている。
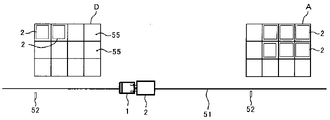
図1は、実施形態の自律移動装置である自走ロボット1と、連結対象であるカゴ台車2との説明図である。
本実施形態は、カゴ台車2のような被牽引台車に自動で接続して、牽引することで、所望の搬送先へ被牽引台車を自動搬送する自走ロボット1のような自律移動装置と、この自走ロボット1を用いた搬送システムに関する実施形態である。
磁気センサ3及び測域センサ9は、自走ロボット1の周辺環境を認識する環境認識手段である。
カゴ台車2は、カゴ部20を保持する底板22と、四角形状の底板22の四隅に配置されたキャスター23と、カゴ部20の側面に配置されたID表示パネル21とを備える。
ID表示パネル21は、カゴ台車2に取り付けられており、搬送位置などの情報もしくはテーブル参照によって認識できるID情報を読み取れるようになっている。マーカーのIDの表示方法は一般的なバーコードやQRコード(登録商標)が使える。また、IDとしてカラーコードや、濃淡バーコードによって単位面積当たりの情報量を増やすことで、より遠くから認識できるようになる。
図2(a)は、カゴ台車2にIDがカラーコードからなるマーカーを表示するID表示パネル21が配置された例の斜視図である。図2(b)はカラーコードの一例の説明図であり、図2(c)は濃淡バーコードの一例の説明図である。
QRコードやカラーコードはバーコードと異なり、カメラを使った読み取りを行うことで、コードのID情報とともにカメラによって撮像された撮像画像に基づいてカメラに対するID表示パネル21の位置情報を同時に取得することができる。このため、読み取る対象物(本実施形態ではID表示パネル21)が置かれている位置を認識することができる。
自走ロボット1による搬送動作は、次の(1)~(3)の三つの作業に分割される。
(1)仮置きエリアでの搬送対象の探索および連結。
(2)走行エリアの走行。
(3)保管エリアでの保管場所探索と荷卸し。
図4に示す搬送システムは、走行エリア50と、仮置きエリアAと、第一保管エリアBと、第二保管エリアCとを備える。走行エリア50には自走ロボット1の誘導用の磁気テープまたは光学テープがライン状に設けられ、自走ロボット1が走行する本線51が設けられている。本線51上には自走ロボット1のスタート位置Sがある。また、走行エリア50における仮置きエリアA、第一保管エリアB及び第二保管エリアCの入り口には、本線51の近傍に番地マーク52が配置されている。
まず、本線51上に移動体である自走ロボット1を配置してライン認識できている状態でスタートさせることで、自走ロボット1は本線51に沿った走行を開始する(S1)。本線51を走行中はラインの位置を見て指定速度で走行する。仮置きエリアAの番地マーク52を探索しながら走行し、仮置きエリアAの番地マーク52を検出したら(S2で「Yes」)停止する。
自走ロボット1は、本線51が設けられた走行エリア50から仮置きエリアAに進入すると、走行しながら、仮置きされているカゴ台車2のID表示パネル21のマーカーを読み取り、カゴ台車2のリストを生成する。このとき、ID、XY座標及び搬送先を記録し、優先順位があれば一緒に記録する。そして、仮置きエリアAの終端の番地マークで走行停止し、生成したカゴ台車2のリストから搬送対象を選定し(S4)、選定した搬送対象のカゴ台車2との連結動作を開始する(S5)。
自走ロボット1は、本線51が設けられた走行エリア50から保管エリア(BまたはC)に進入すると、走行しながら、保管されているカゴ台車2のID表示パネル21のマーカーを読み取り、カゴ台車2のリストを生成する。このとき、IDとXY座標、搬送先、および優先順位があれば一緒に記録する。次に、保管エリア(BまたはC)の終端の番地マークで走行停止し、生成したカゴ台車2のリストから空き番地を探す(S11)。そして、空き番地の中から搬送中のカゴ台車2を車庫入れする番地を選定し(S12)、選定した空き番地への車庫入れ動作を開始する(S13)。
連結を解除したら保管エリア(BまたはC)から本線51に戻り、再び仮置きエリアAの探索を開始する。
仮置きエリアA、保管エリア(BまたはC)は本線51から外れた位置に配置する。エリア内を探索走行するための走行ライン53と停止マーク54とを付けておく。カゴ台車2を置く位置(駐車場55)には、枠線やマークを付けておき、人が置き易くする。自走ロボット1は、仮置きエリアAまたは保管エリア(BまたはC)に進入したら停止マーク54を検知するまで走行ライン53上をライン誘導によって走行する。
自走ロボット1は、移動しながら測域センサ9を使って置いてあるカゴ台車2を探索しリスト化し、停止マーク54を見つけたら停止して、連結対象のカゴ台車2または車庫入れを行う番地(駐車場55)を選定する。
車庫入れ動作の場合は、駐車場55の番地のXY座標に位置決めするように環境認識をしながら移動しても良いし、位置決め用のラインを敷設して、ラインによる位置決めを行っても良い。
変形例の搬送システムでは、仮置きエリアAと保管エリアDとが本線51のすぐ横にある構成である。変形例では、自走ロボット1は、本線51を走行したまま、仮置きエリアAや保管エリアDのエリア内の探索を行う。仮置きエリアA内に搬送対象となるカゴ台車2を見つけたら、本線51上からカゴ台車2への連結動作に移行する。また、保管エリアDに対しても、本線51上から空き番地を探索して、車庫入れ動作を行う。
具体的には、連結する対象にマーカーを取り付けて、自律移動装置に取り付けた距離情報の取得装置によってマーカーを認識し、マーカーの位置座標を算出することで、連結位置の認識を行う。そして、認識した連結位置で停止するように、自律移動装置の駆動を制御して位置決めを行う。
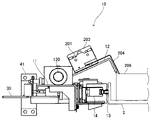
図8は、連結装置10の説明図であり、図8(a)は連結爪12が開いた状態の連結装置10の斜視図であり、図8(b)は連結爪12が閉じた状態の連結装置10の斜視図であり、図8(c)は連結装置10の上面図である。
固定板材30は自走ロボット1のロボット本体部100に対して連結装置10を固定する部材であり、固定ネジ穴30aでロボット本体部100のフレームにネジ止めすることで固定する。
連結爪12と磁石13との両方を用いるのは、以下の理由による。
すなわち、連結爪12だけでは連結動作のタイミングが計れずに自走ロボット1の高精度な位置決めが必要になり、磁石13だけでは搬送対象であるカゴ台車2の重量が大きい場合に搬送中に離れることがあるためである。
第一のステップとして、自走ロボット1をカゴ台車2に対して一定の距離でかつ略正対した姿勢になるように駆動する。
第二のステップとして、略正対した姿勢のままでカゴ台車に向かって速度を落として進む。
第三のステップとして、カゴ台車2のフレームに対する磁石13の吸着が確認された後に自走ロボット1を停止させると共に、連結爪12を動作させて固定する。
磁石13としては、回動部材11に複数個配置することが好ましい。これは以下の理由による。
すなわち、カゴ台車2における連結対象となるフレームは、一般的に高さ方向に短く、幅方向に長い。これに対し汎用の磁石は円筒型また角型のものが多いので、例えば小型の磁石を二個横方向に並べて使うことで、横長のフレームに対して磁力を作用させる面を大きくでき、大型の磁石を一個用いるよりも安価で確実に吸着させることができる。
図10に示す断面では、回動部材11はL字型の断面となっており、水平方向に延在する回動部材11の後側(連結時の連結対象側、図10中の右側)の端部で折れ曲がり、鉛直下方に延在する回動部材磁石取付部11aを形成している。
また、連結装置10は、磁石保持シャフト131bを介して回動部材磁石取付部11aに保持された磁石13が下方に移動して磁石保持シャフト131bが傾くことを防止する構成として磁石13の下面を保持する磁石下面保持部を備える。
自走ロボット1がカゴ台車2に対して傾いた状態で連結しようとしている場合に、磁石13の吸着力によって回動部材11が回動する前に、磁石13の角が片当たりすることでカゴ台車2のフレームを突いてしまう可能性がある。これに対して、本実施形態の連結装置では、弾性部材によって片当たりした磁石13の向きを変えることができるので、より確実に吸着させることができる。
図11(a)は、連結後の連結爪12が閉じた状態(図8(b)の状態)を示し、図11(b)は、連結前の連結爪12が開いた状態(図8(a)の状態)を示している。
連結爪12の動作を行う構成としては、カゴ台車2のフレーム等のカゴ台車2の一部に引掛けて、カゴ台車2を牽引または押圧することができる構成であればよい。本実施形態の連結装置10では、連結爪12の動作を行う構成として、直動シリンダによる機構を用いる。
連結動作を行う際には、まず、連結爪12の先端がカゴ台車2のフレームに引掛らないように上方に退避させておき、磁石13による吸着後に連結爪シャフト120の回動によって連結爪12の先端がカゴ台車2のフレーム高さに掛かるように下ろす。
連結を解除する動作を行う際には、同様に連結爪シャフト120を連結動作とは逆方向に回動させることで連結爪12の先端を上げる。
電動シリンダ121における移動部であって、電動シリンダ121の駆動によって上下方向に移動するシリンダ部123の先端は図11中の下側端部であり、シリンダ部123は所定の長さの範囲で伸縮させることができる。
図11(a)に示す状態から電動シリンダ121の駆動によりシリンダ部123が縮むと、上下動伝達部材125が上方に移動し、その上端が接触する凸状板材126を上方に押し上げる。これにより、凸状板材126が固定された上下動伝達板材127が上方に引き上げられ、上下動伝達板材127が固定された連結爪シャフト120が図11中の反時計回り方向に回転する。この回転によって連結爪シャフト120に固定された連結爪12も連結爪シャフト120を中心に図11中の反時計回り方向に回転して、図11(b)に示すように連結爪12が開いた状態となる。
図12は、連結爪12の先端形状の説明図であり、図12(a)は上述した実施形態の連結装置10で用いた先端の曲がった部分が一枚の形状の説明図であり、図12(b)は先端の曲がった部分が二枚の形状の説明図である。
一方、図12(b)に示す先端の曲がった部分が二枚の形状では、二枚の曲がった部分の間にカゴ台車2のフレームを挟み込んで保持することができる。このため、自走ロボット1がカゴ台車2を牽引する場合だけでなく、自走ロボット1がカゴ台車2を所定の位置に押し入れるような動作を伴う場合に、より安定した動作を行うのに適した構成である。
本実施形態では、連結時にバンパー40の先端が磁石13よりも先にカゴ台車2に接触しないように、磁石13よりもバンパー40が出っ張らない配置としている。また、連結爪12によるカゴ台車2との連結後に、バンパー40を伸ばすように駆動する構成としても良い。これにより、自走ロボット1による牽引搬送中のカゴ台車2の挙動をより安定させることができる。
このようなバンパー40を配置することで、カゴ台車2と自走ロボット1との接触を防止し、接触に起因する損傷を防ぐことが可能となる。
このため、連結装置10の連結爪12としては、カゴ台車2の連結面の中心に対して、二つの連結爪12がカゴ部20の縦フレームに干渉しない間隔となるように配置する。そして、上述したID表示パネル21をカゴ台車2の連結面における横方向の中心となる位置に設置し、このID表示パネル21の位置を測域センサ9を用いて認識することで、二つの連結爪12を縦フレームに干渉させずに連結させることが可能となる。
これに対して、本実施形態の自走ロボット1では、連結対象であるカゴ台車2に対して完全に正対して静止した状態でなくても、引掛け部材である連結爪12による連結固定動作を行うことができる。
また、連結走行装置としては、連結した連結対象を牽引する構成に限らず、連結対象を押して移動させたり、持ち上げて移動させたりする構成であってもよい。
次に、上述した実施形態の連結装置10に本発明を適用した一つ目の実施例(以下、「実施例1」と呼ぶ)について説明する。
図13及び図14は、実施例1の連結装置10の斜視図であり、図13は、連結爪12が閉じた状態の説明図である。図14は、連結爪12が開いた状態の説明図である。
実施例1の連結装置10は、検知手段である接触検知センサ201を備える。図13及び図14では、便宜的に電動シリンダ121及び直動シリンダ保持部材122を取り外した状態の連結装置10を示している。
接触検知センサ201は、センサの筐体からレバー204が連結爪12の先端側に向けて突き出しており、連結爪12に対してレバー204が図15(a)中の矢印「I」方向に所定の量変位するとスイッチが入るようになっている。
さらに、連結爪12と積載物が接触した状態では、連結爪12が所定の位置まで回転できずにカゴ台車2のフレームに連結爪12を引掛けることができない。そのままではカゴ台車2と自走ロボット1とが連結できず、自走ロボット1のみで動いてしまうことになり、所望の機能が達成できない。
そのため連結爪12が回転を始め、ある一定時間経過した後は接触検知センサ201の信号は無視することで誤検知を防ぐことができる。接触検知センサ201の信号を無視するタイミングとしては、回転を始めてから一定時間経過後でもよいし、連結爪12の回転状態や連結爪シャフト120の回転状態の検出結果に基づいた所定の回転量回転後でもよい。連結爪12をカゴ台車2のフレームに引っ掛ける連結動作の中で接触検知センサ201の信号を無視するタイミングを設けることで誤検知を防ぐことができる。
次に、上述した実施形態の連結装置10に本発明を適用した二つ目の実施例(以下、「実施例2」と呼ぶ)について説明する。
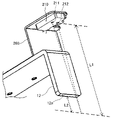
図20は、実施例2の連結装置10が備える連結爪12の先端近傍の拡大斜視図である。
実施例2では、非接触検知センサ210として検知距離(図20中の矢印「L1」)が100[mm]程度のものを用いているが、これに限るものではない。そして、実施例2では、爪先端12aよりも矢印「L2」分(20[mm])だけ、先行側を検知できるように、非接触検知センサ210をブラケット203を介して連結爪12に取り付けている。
実施例1及び実施例2の連結装置10を備える自走ロボット1は、連結爪12によってカゴ台車2等の連結対象と確実に連結でき、連結対象上の荷物206等の搬送物に対して外観品質を落とすことの無いように搬送物を連結対象によって搬送できる。
退避位置から連結位置へと移動することによってカゴ台車2等の連結対象に連結する連結爪12等の連結部材を備える連結装置10等の連結装置において、退避位置から連結位置へと連結部材が移動する経路上の荷物206等の物体の有無を検知する接触検知センサ201または非接触検知センサ210等の検知手段を備えることを特徴とするものである。
これによれば、連結部材が移動する経路上にある物体に連結部材が接触する前に、検知手段によって物体を検知することができる。このため、検知結果に基づいて連結部材の連結位置への移動を停止する制御等、検知した物体に連結部材が接触することを防止する制御が可能となり、連結部材が連結対象以外の物体に接触することを防止することが可能となる。
態様1において、検知手段が、連結部材に設置されていることを特徴とするものである。
これによれば、連結部材がどの位置にあっても連結部材が移動する経路上にある物体の有無を検知することが可能となる。
態様1または2において、連結部材の移動に伴い、検知手段による連結装置における検知領域が変化することを特徴とするものである。
これによれば、連結部材がどの位置にあっても連結部材が移動する経路上にある物体の有無を検知することが可能となる。
態様1乃至3の何れかの態様において、検知手段の検知領域は、退避位置から連結位置へと移動する前記連結部材の移動方向前方であることを特徴とするものである。
これによれば、退避位置から連結位置へと移動する連結動作の際に、連結部材の前方に位置する物体の有無を検知できる。これにより、連結部材の連結動作の際の障害物となり得る物体を予め検知することが可能となる。
態様1乃至4の何れかの態様において、検知手段が、移動経路上に物体を検知した場合は、連結位置への連結部材の移動を停止し、連結部材が前記退避位置に移動することを特徴とするものである。
これによれば、連結部材の移動経路上に物体がある場合であっても、それを検知した際に連結部材を退避位置に戻すことで、作業者等によって移動経路上の物体を移動させ易くなる。移動経路上の物体を移動させることで、再度の連結動作によって、連結装置と連結対象との連結が可能となる。
態様1乃至5の何れかの態様において、連結部材が退避位置から連結位置へと移動する際に検知手段の検知領域に物体が存在しても、検知手段が物体の有無を判断しないタイミングを有することを特徴とすることを特徴とするものである。
これによれば、カゴ台車2の底板等の連結対象の一部が検知手段の検知領域に位置する状態を、連結部材の経路上に、連結部材の移動の妨げとなる物体があると誤検知することを防止できる。
動力モータ7及び駆動車輪71等の移動手段と、カゴ台車2等の連結対象と連結する連結手段と、を備える自走ロボット1等の連結走行装置において、連結手段として、態様1乃至6の何れかの態様に係る連結装置10等の連結装置を備えることを特徴とするものである。
これによれば、荷物206等の連結対象に載置された物体に連結部材が接触することを防止することが可能な連結走行装置を実現することができる。また、連結部材が移動する経路上に物体が存在するときには、連結部材の連結位置への移動を停止し、作業者等に経路上の物体を移動させることで、経路上の物体によって連結が行えないままの状態となることを防止できる。よって、連結走行装置と連結対象とを確実に連結することが可能となる。
動力モータ7及び駆動車輪71等の移動手段と、カゴ台車2等の連結対象と連結する連結手段とを有する連結移動手段と、移動手段を制御するコントローラ4等の制御手段とを備える自走ロボット1等の自律走行装置において、連結移動手段として、態様7に係る連結走行装置の構成を備えることを特徴とするものである。
これによれば、連結対象に載置された物体に連結部材が接触することを防止することが可能な自律走行装置を実現することができる。また、検知手段が連結部材の移動経路上の物体を検知しない間は、作業者が介在しなくても自律走行装置と連結対象とを連結でき、自律走行によって連結対象を搬送することが可能となる。
2 カゴ台車
3 磁気センサ
4 コントローラ
5 カメラ
7 動力モータ
8 モータドライバ
9 測域センサ
10 連結装置
11 回動部材
11a 回動部材磁石取付部
11e 回動部材前端部
12 連結爪
12a 爪先端
13 磁石
14 マイクロスイッチ
20 カゴ部
21 表示パネル
22 底板
23 キャスター
30 固定板材
30a 固定ネジ穴
31 軸保持部
32 回動範囲規制部材
40 バンパー
40a ゴム
40b バンパーシャフト
41 バンパー固定部
50 走行エリア
51 本線
52 番地マーク
53 走行ライン
54 停止マーク
55 駐車場
71 駆動車輪
72 従動車輪
100 ロボット本体部
111 回動軸
113 ベアリングホルダ
120 連結爪シャフト
121 電動シリンダ
122 直動シリンダ保持部材
123 シリンダ部
124 上下動接続部材
125 上下動伝達部材
126 凸状板材
127 上下動伝達板材
131 磁石保持部材
131a 磁石保持突き当て部
131b 磁石保持シャフト
132 第一バネ
133 第二バネ
201 接触検知センサ
203 ブラケット
204 レバー
204a レバー先端
206 荷物
210 非接触検知センサ
211 投光部
212 受光部
1000 物流倉庫
1001 プラットフォーム
1002 エレベータ
2000 トラック
A 仮置きエリア
B 第一保管エリア
C 第二保管エリア
D 保管エリア
M 作業者
S スタート位置
Claims (7)
- 退避位置から連結位置へと移動することによって連結対象に連結する連結部材を備える連結装置において、
前記退避位置から前記連結位置へと前記連結部材が移動する移動経路上の物体の有無を検知する検知手段を備え、
前記連結部材が前記退避位置から前記連結位置へと移動する際に前記検知手段の検知領域に前記物体が存在しても、前記検知手段が前記物体の有無を判断しないタイミングを有することを特徴とする連結装置。 - 請求項1の連結装置において、
前記検知手段が、前記連結部材に設置されていることを特徴とする連結装置。 - 請求項1または2の連結装置において、
前記連結部材の移動に伴い、前記検知手段による前記連結装置における検知領域が変化することを特徴とする連結装置。 - 請求項1乃至3の何れか一項に記載の連結装置において、
前記検知手段の検知領域は、前記退避位置から前記連結位置へと移動する前記連結部材の移動方向前方であることを特徴とする連結装置。 - 請求項1乃至4の何れか一項に記載の連結装置において、
前記検知手段が、前記移動経路上に前記物体を検知した場合は、前記連結位置への前記連結部材の移動を停止し、前記連結部材が前記退避位置に移動することを特徴とする連結装置。 - 移動手段と、
連結対象と連結する連結手段と、を備える連結走行装置において、
前記連結手段として、請求項1乃至5の何れか一項に記載の連結装置を備えることを特徴とする連結走行装置。 - 移動手段と、連結対象に連結する連結手段とを有する連結移動手段と、
前記移動手段を制御する制御手段とを備える自律走行装置において、
前記連結移動手段として、請求項6に記載の連結走行装置を備えることを特徴とする自律走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167985A JP7121925B2 (ja) | 2018-09-07 | 2018-09-07 | 連結装置、連結走行装置及び自律走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167985A JP7121925B2 (ja) | 2018-09-07 | 2018-09-07 | 連結装置、連結走行装置及び自律走行装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020040459A JP2020040459A (ja) | 2020-03-19 |
| JP7121925B2 true JP7121925B2 (ja) | 2022-08-19 |
Family
ID=69797259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018167985A Active JP7121925B2 (ja) | 2018-09-07 | 2018-09-07 | 連結装置、連結走行装置及び自律走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7121925B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025032824A1 (ja) * | 2023-08-10 | 2025-02-13 | 株式会社Fuji | 無人搬送車 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160158942A1 (en) | 2014-12-09 | 2016-06-09 | Bizzy Robots, Inc. | Robotic Touch Perception |
| JP2018090084A (ja) | 2016-12-02 | 2018-06-14 | 株式会社リコー | 連結装置、連結走行装置及び自律走行装置 |
-
2018
- 2018-09-07 JP JP2018167985A patent/JP7121925B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160158942A1 (en) | 2014-12-09 | 2016-06-09 | Bizzy Robots, Inc. | Robotic Touch Perception |
| JP2018090084A (ja) | 2016-12-02 | 2018-06-14 | 株式会社リコー | 連結装置、連結走行装置及び自律走行装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020040459A (ja) | 2020-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6792819B2 (ja) | 連結装置、連結走行装置及び自律走行装置 | |
| JP7004248B2 (ja) | 連結装置、連結移動装置及び自律移動装置 | |
| CA3172332A1 (en) | Method for controlling an automatic guided vehicle and control system adapted to execute the method | |
| US12515342B2 (en) | Adaptive mobile robot behavior based on payload | |
| JP7318244B2 (ja) | 自律移動装置、プログラムおよび自律移動装置による搬送対象物の選択方法 | |
| JP7400315B2 (ja) | 識別部材、識別部材を用いた自律走行装置と搬送対象物の連結システム及び識別部材を用いた自律走行装置と搬送対象物の連結方法 | |
| JP7112803B1 (ja) | 搬送システム、及び搬送制御方法 | |
| EP3656702A1 (en) | Mobile industrial robot with security system for pallet docketing | |
| JP7474419B2 (ja) | 連結装置、連結移動装置、自律移動装置及び誘導システム | |
| JP7207046B2 (ja) | 自律移動装置、誘導システムおよび自律移動装置の移動方法 | |
| JP7121925B2 (ja) | 連結装置、連結走行装置及び自律走行装置 | |
| US20230202817A1 (en) | Control method for mobile object, mobile object, and computer-readable storage medium | |
| US20240338038A1 (en) | Load handling system and load handling method | |
| JP2020191008A (ja) | 自律移動装置および自律移動装置における搬送情報読取方法 | |
| JP2024128140A (ja) | 移動体の制御方法、移動体、移動制御システム及びプログラム | |
| JP7365573B2 (ja) | 連結装置、連結移動装置及び自律移動装置 | |
| JP7595744B2 (ja) | 移動システム及び管理装置 | |
| JP7135883B2 (ja) | 移動体走行システム | |
| JP7360619B2 (ja) | 連結装置、連結移動装置及び自律移動装置 | |
| JP7575836B1 (ja) | 搬送装置 | |
| EP4628428A1 (en) | Automated guided vehicle | |
| JP7509490B1 (ja) | 連結装置 | |
| JP7702771B1 (ja) | 連結装置 | |
| JP7627535B1 (ja) | 走行制御方法、走行制御システム及びプログラム | |
| JP2025113788A (ja) | 無人搬送車および無人搬送車の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220506 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220708 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220721 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7121925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |