JP7119084B2 - スライドラックグリッパ装置 - Google Patents
スライドラックグリッパ装置 Download PDFInfo
- Publication number
- JP7119084B2 JP7119084B2 JP2020524845A JP2020524845A JP7119084B2 JP 7119084 B2 JP7119084 B2 JP 7119084B2 JP 2020524845 A JP2020524845 A JP 2020524845A JP 2020524845 A JP2020524845 A JP 2020524845A JP 7119084 B2 JP7119084 B2 JP 7119084B2
- Authority
- JP
- Japan
- Prior art keywords
- slide rack
- gripper
- finger
- slide
- rack
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/34—Microscope slides, e.g. mounting specimens on microscope slides
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0028—Gripping heads and other end effectors with movable, e.g. pivoting gripping jaw surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0033—Gripping heads and other end effectors with gripping surfaces having special shapes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0033—Gripping heads and other end effectors with gripping surfaces having special shapes
- B25J15/0042—V-shaped gripping surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0093—Program-controlled manipulators co-operating with conveyor means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/023—Cartesian coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G29/00—Rotary conveyors, e.g. rotating discs, arms, star-wheels or cones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/902—Devices for picking-up and depositing articles or materials provided with drive systems incorporating rotary and rectilinear movements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/905—Control arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/365—Control or image processing arrangements for digital or video microscopes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N2035/00089—Magazines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N2035/00099—Characterised by type of test elements
- G01N2035/00138—Slides
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0412—Block or rack elements with a single row of samples
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0439—Rotary sample carriers, i.e. carousels
- G01N2035/0441—Rotary sample carriers, i.e. carousels for samples
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- General Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Pathology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Microscoopes, Condenser (AREA)
Description
本願は、2017年11月30日に出願された米国仮特許出願第62/593,135号の優先権を主張するものであり、完全に記載されているかのように参照により本明細書に援用される。
図1Aは、本発明の一実施形態によるラックスペーサ20を有する例示的なスライドラック30カルーセル10、およびスライドガラス40を有するスライドラック30を示す斜視図である。示される実施形態では、カルーセル10は、カルーセル基部50の上面に取り付けられ、カルーセル基部50の上面から上方に延在する複数のラックスペーサ20を含む。一実施形態では、各ラックスペーサ20は、オペレータの手がスライドラック30をカルーセル10に挿入し、カルーセル10から取り除くことを可能にする、および/またはスライドラック30グリッパの部分が、スライドラック30をカルーセル10に挿入し、カルーセル10から取り除くことを可能にするように構成されたラックスペーサ凹部60を含む。隣接する複数のラックスペーサ20は、スライドラック30がおもにカルーセル基部50の上面に載るように、スライドラック30を中に配置できるラックスロット70を画定する。一実施形態では、カルーセル基部50の上面は、カルーセル基部50の外部領域からカルーセル基部50の中心領域に向かって下方に傾斜する。スライドガラス40は、スライドラック30内でさまざまなスロットを占有し、一実施形態では、スライドガラス40は、有利なことにカルーセル基部50の上面の角度およびスライドラック30の対応する角度に従って斜めに配置される。さらに、カルーセル10は、複数のラックスペーサ20のそれぞれの上部に固定される中心リングを含む。
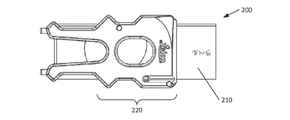
図2は、一実施形態による第1の製造業者からのスライドガラス210を有する例示的な1x3スライドラック200を示す上面図である。示される実施形態では、1x3のスライドラック200は、1x3スライドラック200の側面から外向きに延在する1つ以上のスライドラック突起部220を含む。
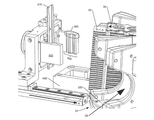
図6Aは、本発明の一実施形態による例示的なスライドラックグリッパ装置400を示す斜視図である。示されている実施形態では、スライドラックグリッパ装置400は、基部に取り付けられる(本明細書ではグリッパモータと呼ぶ)第1のモータ410を含む。基部420は、基部420から上方に延在するフィンガマウント430を支持する。グリッパモータ410は、フィンガマウント430を直線フィンガマウント430軸に沿って移動させるように構成され、直線フィンガマウント430軸により、フィンガマウント430は、複数のスライドラック30を収容するカルーセルに向かっておよびカルーセルから離れて移動する。
一実施形態では、デジタルスライドスキャナ装置のスライドラック30グリッパ装置は、基部および基部420に取り付けられたフィンガマウント430を含む。フィンガマウント430は、フィンガマウント430軸と呼ぶ場合がある第1のリニア軸に沿って移動するように構成される。また、スライドラック30グリッパ装置は、基部420に取り付けられ、フィンガマウント430を第1のリニア軸に沿って動かすように構成された第1のモータ410を含む。また、スライドラック30グリッパ装置は、フィンガマウント430に取り付けられた複数のグリッパフィンガ450も含む。グリッパフィンガ450は、第2のリニア軸と第3のリニア軸に沿って移動するように構成される。第2のリニア軸は、グリッパフィンガ450高さ軸と呼ばれる場合があり、第3のリニア軸は、グリッパフィンガ450把持軸と呼ばれる場合がある。本実施形態では、各グリッパフィンガ450はスライドラック30係合面を含み、第1のグリッパフィンガ450のスライドラック30係合面は、第3のリニア軸に沿って第2のグリッパフィンガ450のスライドラック30係合面に対向する。また、スライドラック30グリッパ装置は、フィンガマウント430に取り付けられ、複数のグリッパフィンガ450を第2のリニア軸に沿って動かすように構成され、第1のグリッパフィンガ450および第2のグリッパフィンガ450を第3のリニア軸に沿って反対方向で動かして、スライドラック30を把持または解放するようにさらに構成された第2のモータ440も含む。
本明細書に説明されるさまざまな実施形態は、図7A~図7Dに関連して説明するようなデジタルパソロジー走査装置を使用し、実施し得る。
Claims (20)
- スライドラックカルーセルからデジタルスライドスキャナ装置の走査ステージにスライドラックを搬送するためのスライドラックグリッパ装置であって、前記スライドラックグリッパ装置は、
基部と、
前記基部に取り付けられ、第1のリニア軸に沿って移動するように構成されたフィンガマウントと、
前記基部に取り付けられ、前記フィンガマウントを前記第1のリニア軸に沿って動かすように構成された第1のモータと、
前記フィンガマウントに取り付けられ、第2のリニア軸および第3のリニア軸に沿って移動するように構成された複数のグリッパフィンガと、
前記フィンガマウントに取り付けられ、前記第2のリニア軸に沿って前記複数のグリッパフィンガを動かすように構成された第2のモータと、
を備え、
各グリッパフィンガは、前記第2のリニア軸を横切る方に延在し、スライドラック係合面を備え、第1のグリッパフィンガの前記スライドラック係合面は、前記第3のリニア軸に沿って第2のグリッパフィンガの前記スライドラック係合面に対向し、
前記第2のモータは、前記第1のグリッパフィンガおよび前記第2のグリッパフィンガを、前記第3のリニア軸に沿って反対方向で動かして、前記スライドラックカルーセル内に配置されているスライドラックを把持または解放するようにさらに構成される、
スライドラックグリッパ装置。 - 前記第1のグリッパフィンガの前記スライドラック係合面は、前記スライドラックの第1の側面から延在する1つ以上のスライドラック突起部に係合するように構成された1つ以上のフィンガ突起部を備える、
請求項1に記載のスライドラックグリッパ装置。 - 前記第1のグリッパフィンガの前記1つ以上のフィンガ突起部は、前記スライドラックが水平面に対して斜めに配置されるとき、前記スライドラックの前記第1の側面から延在する前記1つ以上のスライドラック突起部を把持するように構成される、
請求項2に記載のスライドラックグリッパ装置。 - 前記第2のグリッパフィンガの前記スライドラック係合面は、前記スライドラックの第2の側面から延在する1つ以上のスライドラック突起部に係合するように構成された1つ以上のフィンガ突起部を備える、
請求項2に記載のスライドラックグリッパ装置。 - 前記第2のグリッパフィンガの前記1つ以上のフィンガ突起部は、前記スライドラックが水平面に対して斜めに配置されるとき、前記スライドラックの前記第2の側面から延在する前記1つ以上のスライドラック突起部を把持するように構成される、
請求項4に記載のスライドラックグリッパ装置。 - 前記複数のグリッパフィンガのそれぞれは、そのそれぞれのスライドラック係合面に1つ以上のフィンガ突起部を備え、前記1つ以上のフィンガ突起部は、前記スライドラックの側面から延在する1つ以上のスライドラック突起部に係合するように構成される、
請求項1に記載のスライドラックグリッパ装置。 - 前記複数のグリッパフィンガのそれぞれの前記1つ以上のフィンガ突起部は、前記スライドラックが水平面に対して斜めに配置されるとき、前記スライドラックの前記側面から延在する前記1つ以上のスライドラック突起部を把持するように構成される、
請求項6に記載のスライドラックグリッパ装置。 - 前記第1のリニア軸は、前記第2のリニア軸および前記第3のリニア軸に直交する、
請求項1に記載のスライドラックグリッパ装置。 - 前記第2のリニア軸は、前記第1のリニア軸および前記第3のリニア軸に直交する、
請求項1に記載のスライドラックグリッパ装置。 - 前記第3のリニア軸は、前記第1のリニア軸および前記第2のリニア軸に直交する、
請求項1に記載のスライドラックグリッパ装置。 - 各リニア軸は、他の2つのリニア軸に直交する、
請求項1に記載のスライドラックグリッパ装置。 - 前記スライドラックグリッパ装置は、前記第2のリニア軸に沿って延在し、1つ以上のスライドガラスをスライドラック内に固定するように構成されたスライドリテーナをさらに備える、
請求項1に記載のスライドラックグリッパ装置。 - 前記スライドラックグリッパ装置は、前記スライドラックカルーセルからのスライドラックの除去後に、スライドラックを支持するように構成されたスライドラックプラットフォームをさらに備える、
請求項1に記載のスライドラックグリッパ装置。 - 前記スライドラックグリッパ装置は、前記フィンガマウントに固定された1つ以上のスライドラックセンサをさらに備え、前記スライドラックセンサは、スライドラックの存在を検知するように構成される、
請求項1に記載のスライドラックグリッパ装置。 - 方法であって、前記方法は、
複数のスライドラックを、デジタルスライドスキャナ装置と動作可能に結合されたスライドラックカルーセル内に保管するステップであって、各スライドラックが複数のスライドガラスを支持するステップと、
第1のスライドガラスを前記デジタルスライドスキャナ装置の走査ステージに搬送するステップと、
を含み、
前記搬送するステップは、
スライドラックグリッパのフィンガマウントに取り付けられた第1のグリッパフィンガおよび前記フィンガマウントに取り付けられた第2のグリッパフィンガを、直線グリッパフィンガ把持軸に沿って、前記第1のグリッパフィンガのスライドラック係合面と、前記第2のグリッパフィンガのスライドラック係合面と、の間の所定の距離に動かすことと、
前記第1のグリッパフィンガを前記第1のスライドガラスを支持する第1のスライドラックの第1の側面上の第1のラックスペーサ凹部に配置するために、および、前記第2のグリッパフィンガを前記第1のスライドラックの第2の側面上の第2のラックスペーサ凹部に配置するために、前記フィンガマウントを第1の直線フィンガマウント軸に沿って動かすことと、
前記第1のグリッパフィンガおよび前記第2のグリッパフィンガが、前記第1のスライドラックのそれぞれの第1の側面および第2の側面に配置された後に、前記第1のグリッパフィンガおよび前記第2のグリッパフィンガを互いに向けて、前記直線グリッパフィンガ把持軸に沿って動かして、前記第1のグリッパフィンガの前記スライドラック係合面を前記第1のスライドラックの第1の面と接触させ、前記第2のグリッパフィンガの前記スライドラック係合面を前記第1のスライドラックの第2の面と接触させることと、
前記第1のグリッパフィンガおよび前記第2のグリッパフィンガの前記それぞれのスライドラック係合面と、前記第1のスライドラックの前記第1の面および前記第2の面と、の間の接触の後に、前記フィンガマウントを前記第1の直線フィンガマウント軸に沿って動かして、前記第1のスライドラックを前記スライドラックカルーセルから取り除くことと、
前記第1のスライドラックを前記スライドラックカルーセルから取り除いた後に、前記第1のスライドラックを前記走査ステージに向けて搬送することと、
によって行われる、
方法。 - 2つ以上のグリッパフィンガを前記直線グリッパフィンガ把持軸に沿って動かすことは、前記2つ以上のグリッパフィンガを互いに向かって動かすことを含む、
請求項15に記載の方法。 - 2つ以上のグリッパフィンガを前記直線グリッパフィンガ把持軸に沿って動かすことは、前記2つ以上のグリッパフィンガを互いから離して動かすことを含む、
請求項15に記載の方法。 - 1つ以上の一連の命令を記憶した非一時的コンピュータ可読媒体であって、前記1つ以上の一連の命令は、1つ以上のプロセッサに、
複数のスライドラックを、デジタルスライドスキャナ装置と動作可能に結合されたスライドラックカルーセル内に保管するステップであって、各スライドラックが複数のスライドガラスを支持するステップと、
第1のスライドガラスを前記デジタルスライドスキャナ装置の走査ステージに搬送するステップと、
を実行させ、
前記搬送するステップは、
スライドラックグリッパのフィンガマウントに取り付けられた第1のグリッパフィンガおよび前記フィンガマウントに取り付けられた第2のグリッパフィンガを、直線グリッパフィンガ把持軸に沿って、前記第1のグリッパフィンガのスライドラック係合面と、前記第2のグリッパフィンガのスライドラック係合面と、の間の所定の距離に動かすことと、
前記第1のグリッパフィンガを前記第1のスライドガラスを支持する第1のスライドラックの第1の側面上の第1のラックスペーサ凹部に配置するために、および、前記第2のグリッパフィンガを前記第1のスライドラックの第2の側面上の第2のラックスペーサ凹部に配置するために、前記フィンガマウントを第1の直線フィンガマウント軸に沿って動かすことと、
前記第1のグリッパフィンガおよび前記第2のグリッパフィンガが、前記第1のスライドラックのそれぞれの第1の側面および第2の側面に配置された後に、前記第1のグリッパフィンガおよび前記第2のグリッパフィンガを互いに向けて、前記直線グリッパフィンガ把持軸に沿って動かして、前記第1のグリッパフィンガの前記スライドラック係合面を前記第1のスライドラックの第1の面と接触させ、前記第2のグリッパフィンガの前記スライドラック係合面を前記第1のスライドラックの第2の面と接触させることと、
前記第1のグリッパフィンガおよび前記第2のグリッパフィンガの前記それぞれのスライドラック係合面と、前記第1のスライドラックの前記第1の面および前記第2の面と、の間の接触の後に、前記フィンガマウントを前記第1の直線フィンガマウント軸に沿って動かして、前記第1のスライドラックを前記スライドラックカルーセルから取り除くことと、
前記第1のスライドラックを前記スライドラックカルーセルから取り除いた後に、前記第1のスライドラックを前記走査ステージに向けて搬送することと、
によって行う、
非一時的コンピュータ可読媒体。 - 2つ以上のグリッパフィンガを前記直線グリッパフィンガ把持軸に沿って動かすことは、前記2つ以上のグリッパフィンガを互いに向かって動かすことを含む、
請求項18に記載の媒体。 - 2つ以上のグリッパフィンガを前記直線グリッパフィンガ把持軸に沿って動かすことは、前記2つ以上のグリッパフィンガを互いから離して動かすことを含む、
請求項18に記載の媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762593135P | 2017-11-30 | 2017-11-30 | |
| US62/593,135 | 2017-11-30 | ||
| PCT/US2018/063461 WO2019109028A1 (en) | 2017-11-30 | 2018-11-30 | Slide rack gripper apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021503098A JP2021503098A (ja) | 2021-02-04 |
| JP7119084B2 true JP7119084B2 (ja) | 2022-08-16 |
Family
ID=66664282
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020524845A Active JP7119084B2 (ja) | 2017-11-30 | 2018-11-30 | スライドラックグリッパ装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11597612B2 (ja) |
| EP (1) | EP3625571B1 (ja) |
| JP (1) | JP7119084B2 (ja) |
| CN (2) | CN111344574A (ja) |
| AU (1) | AU2018374379B2 (ja) |
| WO (1) | WO2019109028A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7119084B2 (ja) | 2017-11-30 | 2022-08-16 | ライカ バイオシステムズ イメージング インコーポレイテッド | スライドラックグリッパ装置 |
| WO2019109032A1 (en) * | 2017-12-01 | 2019-06-06 | Leica Biosystems Imaging, Inc. | Fixed reference edge system for slide loading and unloading |
| FR3093020A1 (fr) * | 2019-02-25 | 2020-08-28 | Valeo Systemes Thermiques | Procédé d’assemblage d’un dispositif de chauffage, ventilation et/ou climatisation pour véhicule automobile |
| CN110271861B (zh) * | 2019-06-27 | 2020-12-15 | 安徽智汇和科技服务有限公司 | 一种转运机械手 |
| JP7558174B2 (ja) | 2019-08-06 | 2024-09-30 | ライカ バイオシステムズ イメージング インコーポレイテッド | スライドスキャナの制御 |
| CN114503066A (zh) | 2019-08-06 | 2022-05-13 | 徕卡生物系统成像股份有限公司 | 用于载玻片扫描仪控制的图形用户界面 |
| JP7579259B2 (ja) * | 2019-08-06 | 2024-11-07 | ライカ バイオシステムズ イメージング インコーポレイテッド | オートローダ軸のストール検出 |
| US11465151B2 (en) * | 2020-02-07 | 2022-10-11 | Mikroscan Technologies Inc. | Method and apparatus for handling slides |
| WO2022011604A1 (zh) * | 2020-07-15 | 2022-01-20 | 深圳华大智造科技股份有限公司 | 自动化建库系统 |
| CN111977353B (zh) * | 2020-07-23 | 2022-03-04 | 金华科生物技术河北有限公司 | 可调节型试纸送样装置 |
| US20240010448A1 (en) * | 2020-12-08 | 2024-01-11 | Sony Group Corporation | Glass slide conveyance device and glass slide image capturing system |
| US20240286297A1 (en) * | 2021-07-06 | 2024-08-29 | Hitachi High-Tech Corporation | Glass slide transport device |
| CN113624684B (zh) * | 2021-08-04 | 2022-06-24 | 杭州医派智能科技有限公司 | 一种病理切片扫描仪 |
| CN114132750B (zh) * | 2022-01-28 | 2022-04-22 | 儒克生物科技常州有限公司 | 荧光检测系输送系统 |
| CN114268729B (zh) * | 2022-03-03 | 2022-04-29 | 立川(深圳)智能科技设备有限公司 | 一种大面积aoi线扫相机机构 |
| JP2025511774A (ja) * | 2022-04-05 | 2025-04-16 | ベンタナ メディカル システムズ, インコーポレイテッド | 病理スライド自動化システム及び方法 |
| CN114770564B (zh) * | 2022-06-16 | 2022-09-02 | 江苏俊超电动车配件制造有限公司 | 一种旋转式电动车轮毂冷却机械手 |
| CN115922777B (zh) * | 2023-03-15 | 2023-06-09 | 西安蜂鸟中试科技有限公司 | 用于智能设备中试生产线的转运输送机械臂 |
| CN118209386B (zh) * | 2024-04-10 | 2025-05-02 | 深圳官芯生物科技有限公司 | 一种细胞检测装置 |
| KR20260006363A (ko) | 2024-07-04 | 2026-01-13 | 주식회사 뷰웍스 | 슬라이드 스캐너 및 슬라이드 스캐너의 오토 티칭 방법 |
| CN121632967A (zh) * | 2026-02-05 | 2026-03-10 | 杭州迪英加科技有限公司 | 一种多功能病理切片扫描理片机 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012177803A (ja) | 2011-02-25 | 2012-09-13 | Olympus Corp | スライドガラス搬送装置 |
| JP2012242384A (ja) | 2011-05-13 | 2012-12-10 | Leica Biosystems Nussloch Gmbh | ラックを移送するためのリニア移送機構を備えた試料スライドの処理装置 |
| JP2014526712A (ja) | 2011-09-09 | 2014-10-06 | ベンタナ メディカル システムズ, インコーポレイテッド | イメージングシステム、カセッテ、およびこれを使用する方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5971018A (ja) | 1982-10-15 | 1984-04-21 | Ikegami Tsushinki Co Ltd | 自動顕微鏡装置 |
| US6395554B1 (en) * | 1999-09-03 | 2002-05-28 | Packard Instrument Company | Microarray loading/unloading system |
| US6592324B2 (en) | 2001-02-26 | 2003-07-15 | Irm, Llc | Gripper mechanism |
| EP1463611A2 (en) * | 2001-10-31 | 2004-10-06 | Thermo CRS Ltd. | A robotic device for loading laboratory |
| NO20045625D0 (no) | 2004-12-23 | 2004-12-23 | Torstein Ljungmann | Holdeanordning for objektglass med vevsprover |
| US20060246576A1 (en) | 2005-04-06 | 2006-11-02 | Affymetrix, Inc. | Fluidic system and method for processing biological microarrays in personal instrumentation |
| DE102005042214A1 (de) | 2005-09-05 | 2007-03-22 | Leica Microsystems Nussloch Gmbh | Aufnahme- und Übergabestation für eingedeckte Objektträger |
| US9164113B2 (en) * | 2009-08-07 | 2015-10-20 | Siemens Healthcare Diagnostics Inc. | Methods, systems, and apparatus adapted to transfer sample containers |
| US8360355B2 (en) | 2010-08-04 | 2013-01-29 | The Boeing Company | Wing-to-body fairing with spray-on foam and noise reduction method |
| DE102010054360B4 (de) * | 2010-12-13 | 2018-09-20 | Leica Biosystems Nussloch Gmbh | Vorrichtung, Rackwendermodul, System und Verfahren zum Wenden von Racks |
| DE102010061611B3 (de) | 2010-12-29 | 2012-02-16 | Leica Biosystems Nussloch Gmbh | Identifizierung von Objektträgern |
| DE102011110250B4 (de) | 2011-05-13 | 2019-05-16 | Leica Biosystems Nussloch Gmbh | Greifvorrichtung zum Transportieren von Racks |
| DE102012007134B3 (de) | 2012-04-10 | 2013-05-16 | Märzhäuser Wetzlar GmbH & Co. KG | Objektträger-Bevorratungs- und -Bereitstellungs-Vorrichtung |
| DE102012008242A1 (de) * | 2012-04-25 | 2013-10-31 | Giesecke & Devrient Gmbh | Greifeinrichtung zum Greifen von Blattgut |
| JP6171984B2 (ja) | 2014-03-07 | 2017-08-02 | 株式会社ダイフク | 物品支持装置 |
| CN205600546U (zh) * | 2016-03-23 | 2016-09-28 | 新昌新天龙纽尚精密轴承有限公司 | 一种可移动的轴承夹持装置 |
| US10338365B2 (en) * | 2016-08-24 | 2019-07-02 | Optrascan, Inc. | Slide storage, retrieval, transfer, and scanning system for a slide scanner |
| CN107081521B (zh) * | 2017-06-15 | 2019-11-05 | 武汉天琪激光设备制造有限公司 | 一种用于激光切管机的托举下料管材装置 |
| JP7119084B2 (ja) | 2017-11-30 | 2022-08-16 | ライカ バイオシステムズ イメージング インコーポレイテッド | スライドラックグリッパ装置 |
-
2018
- 2018-11-30 JP JP2020524845A patent/JP7119084B2/ja active Active
- 2018-11-30 CN CN201880069815.1A patent/CN111344574A/zh active Pending
- 2018-11-30 EP EP18884764.4A patent/EP3625571B1/en active Active
- 2018-11-30 AU AU2018374379A patent/AU2018374379B2/en active Active
- 2018-11-30 US US16/624,196 patent/US11597612B2/en active Active
- 2018-11-30 CN CN202510154026.XA patent/CN120039621A/zh active Pending
- 2018-11-30 WO PCT/US2018/063461 patent/WO2019109028A1/en not_active Ceased
-
2023
- 2023-01-30 US US18/102,993 patent/US20230174321A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012177803A (ja) | 2011-02-25 | 2012-09-13 | Olympus Corp | スライドガラス搬送装置 |
| JP2012242384A (ja) | 2011-05-13 | 2012-12-10 | Leica Biosystems Nussloch Gmbh | ラックを移送するためのリニア移送機構を備えた試料スライドの処理装置 |
| JP2014526712A (ja) | 2011-09-09 | 2014-10-06 | ベンタナ メディカル システムズ, インコーポレイテッド | イメージングシステム、カセッテ、およびこれを使用する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2018374379B2 (en) | 2021-03-04 |
| JP2021503098A (ja) | 2021-02-04 |
| EP3625571B1 (en) | 2024-04-10 |
| US11597612B2 (en) | 2023-03-07 |
| AU2018374379A1 (en) | 2020-07-16 |
| EP3625571A1 (en) | 2020-03-25 |
| US20230174321A1 (en) | 2023-06-08 |
| CN111344574A (zh) | 2020-06-26 |
| WO2019109028A1 (en) | 2019-06-06 |
| CN120039621A (zh) | 2025-05-27 |
| EP3625571A4 (en) | 2021-03-03 |
| US20200109015A1 (en) | 2020-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7119084B2 (ja) | スライドラックグリッパ装置 | |
| US11422141B2 (en) | Slide rack clamp apparatus | |
| JP7288115B2 (ja) | スライド在庫調べおよび再挿入システム | |
| JP7004813B2 (ja) | スライドの搬入および搬出のための固定基準エッジシステム | |
| CN110799880B (zh) | 用于不同大小的载片的可调节载片台 | |
| JP7119085B2 (ja) | 衝撃再走査システム | |
| JP2020535478A (ja) | 2回通過式マクロ画像 | |
| CN111279200A (zh) | 载片架转盘 | |
| EP3625568B1 (en) | Carousel for slides with different sizes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200507 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210628 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220328 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20220603 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7119084 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |