JP7009230B2 - 非破壊検査装置及び非破壊検査方法 - Google Patents
非破壊検査装置及び非破壊検査方法 Download PDFInfo
- Publication number
- JP7009230B2 JP7009230B2 JP2018009071A JP2018009071A JP7009230B2 JP 7009230 B2 JP7009230 B2 JP 7009230B2 JP 2018009071 A JP2018009071 A JP 2018009071A JP 2018009071 A JP2018009071 A JP 2018009071A JP 7009230 B2 JP7009230 B2 JP 7009230B2
- Authority
- JP
- Japan
- Prior art keywords
- detector
- rays
- subject
- ray source
- destructive inspection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- PAFZNILMFXTMIY-UHFFFAOYSA-N NC1CCCCC1 Chemical compound NC1CCCCC1 PAFZNILMFXTMIY-UHFFFAOYSA-N 0.000 description 1
Images





Landscapes
- Escalators And Moving Walkways (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Measurement Of Radiation (AREA)
Description
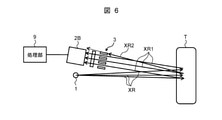
図1は、第1の実施の形態によるX線検査装置の構成例を示す概念図である。第1の実施の形態によるX線検査装置は、X線を照射するX線源1、検出器2、ソーラースリット3、第1のフィルタ4、第2のフィルタ5及び処理部9を備える。なお、処理部9の詳細については後述する。
第2の実施の形態によるX線検査装置は、第1の実施の形態によるX線検査装置とほぼ同様の構成及び動作については説明を省略し、以下、両者の相違点を中心として説明する。
第3の実施の形態によるX線検査装置は、上述した各実施の形態によるX線検査装置とほぼ同様の構成及び動作については説明を省略し、以下、両者の相違点を中心として説明する。
第4の実施の形態によるX線検査装置は、上述した各実施の形態によるX線検査装置とほぼ同様の構成及び動作については説明を省略し、以下、両者の相違点を中心として説明する。
第5の実施の形態によるX線検査装置は、上述した各実施の形態によるX線検査装置とほぼ同様の構成及び動作については説明を省略し、以下、両者の相違点を中心として説明する。
第6の実施の形態によるX線検査装置は、上述した各実施の形態によるX線検査装置とほぼ同様の構成及び動作については説明を省略し、以下、両者の相違点を中心として説明する。
上記実施形態は、本発明を説明するための例示であり、本発明をこれらの実施形態にのみ限定する趣旨ではない。本発明は、その趣旨を逸脱しない限り、様々な形態で実施することができる。例えば、上記実施形態では、エスカレータのハンドレールを例として説明したが、これに限定されるものではない。被写体Tの表面に検査装置を添わせることで検査が可能であることから、上述したエスカレータのハンドレールの他にも、配管の亀裂若しくはジョイント部のずれ、または、壁若しくは床面の探傷へ適用することができる。
Claims (14)
- X線を照射するX線源と、
被写体の位置を基準として前記X線源の近傍側に設置されており前記X線源から照射されたX線が前記被写体で散乱した後方散乱X線を検出する検出器と、
前記検出器と前記被写体との間における前記検出器の前に設置されたソーラースリットと、
前記X線源と前記被写体との間における前記X線源の前に設置された第1のフィルタと、
前記検出器と前記被写体との間における前記検出器の前に設置された第2のフィルタと、
前記検出器による検出結果をクラスタリングした実行結果に基づく後方散乱X線で表される前記被写体の内部の断面構造を表す後方散乱X線画像を所定基準と比較することで正常及び異常の判定を実施する処理部と、
を備えることを特徴とする非破壊検査装置。 - 前記第1のフィルタは、
前記X線源のターゲットから発生する前記照射X線のエネルギーを特性X線が入射しない第1の帯域に限定して該第1の帯域外のエネルギーの特性X線をフィルタリングする金属を材質とすることを特徴とする請求項1に記載の非破壊検査装置。 - 前記第1のフィルタは、
前記X線源のターゲットの材質を構成する元素の一つ下の原子番号の元素を材質とすることを特徴とする請求項1に記載の非破壊検査装置。 - 前記第2のフィルタは、
前記被写体から発生し前記検出器に入射するX線のエネルギーを蛍光X線が入射しない第2の帯域に限定して該第2の帯域外のエネルギーの蛍光X線をフィルタリングする金属を材質とすることを特徴とする請求項1に記載の非破壊検査装置。 - 前記第2のフィルタは、
前記被写体の材質を構成する元素の一つ下の原子番号の元素を材質とすることを特徴とする請求項1に記載の非破壊検査装置。 - 前記ソーラースリットは、
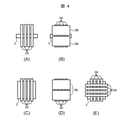
複数のスリット板が一方向に並列に配列する構造であることを特徴とする請求項1に記載の非破壊検査装置。 - 前記ソーラースリットは、
複数のスリット板が互いに垂直な2方向に並列に配列する格子状の構造であることを特徴とする請求項1に記載の非破壊検査装置。 - 前記ソーラースリットを構成しているスリット板のピッチが前記検出器の画素ピッチの倍数であることを特徴とする請求項1に記載の非破壊検査装置。
- 前記検出器は、各画素が1次元に配列するライン状の検出器であることを特徴とする請求項1に記載の非破壊検査装置。
- 前記検出器は、各画素が2次元に配列するエリア状の検出器であることを特徴とする請求項1に記載の非破壊検査装置。
- 前記ソーラースリットの方向が前記被写体へのX線の入射方向に対して45度であることを特徴とする請求項1に記載の非破壊検査装置。
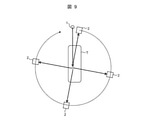
- 前記ソーラースリットと前記検出器との組み合わせが複数設置されており、前記ソーラースリットと前記検出器の複数の組み合わせが、前記被写体へのX線の入射方向に対して線対称な位置に配置されていることを特徴とする請求項1に記載の非破壊検査装置。
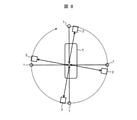
- 前記ソーラースリットと前記検出器との組み合わせが複数設置されており、前記ソーラースリットと前記検出器との複数の組み合わせが、前記被写体へのX線の入射方向に対して前記被写体を中心として放射状に設置されていることを特徴とする請求項1に記載の非破壊検査装置。
- X線源がX線を照射する照射ステップと、
被写体の位置を基準として前記X線源の近傍側に検出器を配置する検出器配置ステップ
と、
前記検出器と前記被写体との間における前記検出器の前にソーラースリットを設置するーラースリット配置ステップと、
前記X線源と前記被写体との間における前記X線源の前に第1のフィルタを設置する第1のフィルタ配置ステップと、
前記検出器と前記被写体との間における前記検出器の前に第2のフィルタを設置する第2のフィルタ配置ステップと、
前記検出器を用いて、前記X線源から照射されたX線が前記被写体で散乱した後方散乱X線を検出する検出ステップと、
処理部が、前記検出器による検出結果をクラスタリングした実行結果に基づく後方散乱X線で表される前記被写体の内部の断面構造を表す後方散乱X線画像を所定基準と比較することで正常及び異常の判定を実施する処理ステップと、
を有することを特徴とする非破壊検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018009071A JP7009230B2 (ja) | 2018-01-23 | 2018-01-23 | 非破壊検査装置及び非破壊検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018009071A JP7009230B2 (ja) | 2018-01-23 | 2018-01-23 | 非破壊検査装置及び非破壊検査方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019128204A JP2019128204A (ja) | 2019-08-01 |
| JP7009230B2 true JP7009230B2 (ja) | 2022-01-25 |
Family
ID=67473098
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018009071A Active JP7009230B2 (ja) | 2018-01-23 | 2018-01-23 | 非破壊検査装置及び非破壊検査方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7009230B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024005926A (ja) * | 2022-06-30 | 2024-01-17 | 株式会社日立ビルシステム | X線検査装置、エスカレーター検査装置及び方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000055839A (ja) | 1998-08-05 | 2000-02-25 | Nippon Steel Corp | 蛍光x線分析装置 |
| JP2001091699A (ja) | 1999-07-23 | 2001-04-06 | Koninkl Philips Electronics Nv | 可変コリメータを有する放射分析用装置 |
| JP2001208705A (ja) | 2000-01-27 | 2001-08-03 | Mitsubishi Heavy Ind Ltd | 散乱x線式欠陥検出装置及びx線検出装置 |
| JP2007010559A (ja) | 2005-07-01 | 2007-01-18 | Axion Japan:Kk | 放射線用コリメータ、放射線検出装置、及び放射線用コリメータの製造方法 |
| JP2008203245A (ja) | 2007-01-23 | 2008-09-04 | Sii Nanotechnology Inc | X線分析装置及びx線分析方法 |
| JP2012013423A (ja) | 2010-06-29 | 2012-01-19 | Nippon Steel Corp | X線応力測定装置 |
| JP2013253969A (ja) | 2012-05-22 | 2013-12-19 | Aribex Inc | 3d散乱撮像に用いるハンドヘルドx線システム |
| JP2017009356A (ja) | 2015-06-18 | 2017-01-12 | 新東工業株式会社 | 残留応力測定装置及び残留応力測定方法 |
| JP2017510827A (ja) | 2013-12-22 | 2017-04-13 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 堆積用監視システム及びその操作方法 |
| JP2017142261A (ja) | 2017-04-13 | 2017-08-17 | 国立研究開発法人物質・材料研究機構 | X線撮像装置及びその使用方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5832200A (ja) * | 1981-08-20 | 1983-02-25 | ワコー電子株式会社 | 特性x線の単色性を強める方法 |
| NL2009049C2 (en) * | 2012-06-21 | 2013-12-24 | Entech Scient B V | Method and device for identifying unknown substances in an object. |
-
2018
- 2018-01-23 JP JP2018009071A patent/JP7009230B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000055839A (ja) | 1998-08-05 | 2000-02-25 | Nippon Steel Corp | 蛍光x線分析装置 |
| JP2001091699A (ja) | 1999-07-23 | 2001-04-06 | Koninkl Philips Electronics Nv | 可変コリメータを有する放射分析用装置 |
| JP2001208705A (ja) | 2000-01-27 | 2001-08-03 | Mitsubishi Heavy Ind Ltd | 散乱x線式欠陥検出装置及びx線検出装置 |
| JP2007010559A (ja) | 2005-07-01 | 2007-01-18 | Axion Japan:Kk | 放射線用コリメータ、放射線検出装置、及び放射線用コリメータの製造方法 |
| JP2008203245A (ja) | 2007-01-23 | 2008-09-04 | Sii Nanotechnology Inc | X線分析装置及びx線分析方法 |
| JP2012013423A (ja) | 2010-06-29 | 2012-01-19 | Nippon Steel Corp | X線応力測定装置 |
| JP2013253969A (ja) | 2012-05-22 | 2013-12-19 | Aribex Inc | 3d散乱撮像に用いるハンドヘルドx線システム |
| JP2017510827A (ja) | 2013-12-22 | 2017-04-13 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 堆積用監視システム及びその操作方法 |
| JP2017009356A (ja) | 2015-06-18 | 2017-01-12 | 新東工業株式会社 | 残留応力測定装置及び残留応力測定方法 |
| JP2017142261A (ja) | 2017-04-13 | 2017-08-17 | 国立研究開発法人物質・材料研究機構 | X線撮像装置及びその使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019128204A (ja) | 2019-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7885381B2 (en) | Method for inspecting pipes, and radiographic non-destructive inspection apparatus | |
| JP2000321221A (ja) | Ctシステムで投影データを作成する方法およびシステム | |
| JP2009525084A (ja) | X線システムを用いた投影画像および断層撮影画像の作成方法 | |
| US20150377804A1 (en) | Collection of tomographic inspection data using compton scattering | |
| CN101960297B (zh) | X射线计算机断层成像装置和采用x射线计算机断层成像检测对象的方法 | |
| Ghandourah et al. | Evaluation of welding imperfections with X-ray computed laminography for NDT inspection of carbon steel plates | |
| JP2008275352A (ja) | 配管の検査方法及び配管の検査装置 | |
| EP2711695B1 (en) | Method of getting a tomogram used by X-ray computed tomography and X-ray computed tomography system based on its method | |
| EP2679989A2 (en) | X-ray CT system for measuring three dimensional shapes and measuring method of three dimensional shapes by X-ray CT system | |
| JP2007508559A (ja) | 扇ビーム・コヒーレント散乱コンピュータ断層撮影法 | |
| JP7009230B2 (ja) | 非破壊検査装置及び非破壊検査方法 | |
| US20190025231A1 (en) | A method of detection of defects in materials with internal directional structure and a device for performance of the method | |
| JP2013205267A (ja) | X線断層撮影方法およびx線断層撮影装置 | |
| US8858076B2 (en) | Multi-step contrast sensitivity gauge | |
| JP2009276142A (ja) | 放射線検査システム及び放射線検査の撮像方法 | |
| JP2024005926A (ja) | X線検査装置、エスカレーター検査装置及び方法 | |
| JP5610885B2 (ja) | X線撮像装置および撮像方法 | |
| JP2009276285A (ja) | 放射線断層撮影装置および放射線断層撮影方法 | |
| Ghandourah et al. | Evaluation of Welding Defects with X-ray Digital Laminography for NDT inspection of Carbon Steel Plate | |
| JP5030056B2 (ja) | 非破壊検査方法及び装置 | |
| JP4062232B2 (ja) | X線ct装置及びx線ct装置による撮像方法 | |
| Ewert et al. | X-ray tomographic in-service inspection of girth welds-The European project TomoWELD | |
| JP5492634B2 (ja) | 放射線断層撮影方法および放射線断層撮影装置 | |
| JP3787347B2 (ja) | 伝熱管群検査装置 | |
| WO2018092256A1 (ja) | X線インライン検査システム及びx線インライン検査システムの撮像方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210601 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7009230 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |