JP6986337B2 - 可変磁束モータ - Google Patents
可変磁束モータ Download PDFInfo
- Publication number
- JP6986337B2 JP6986337B2 JP2016140198A JP2016140198A JP6986337B2 JP 6986337 B2 JP6986337 B2 JP 6986337B2 JP 2016140198 A JP2016140198 A JP 2016140198A JP 2016140198 A JP2016140198 A JP 2016140198A JP 6986337 B2 JP6986337 B2 JP 6986337B2
- Authority
- JP
- Japan
- Prior art keywords
- inner rotor
- outer stator
- skew angle
- axial direction
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
(a)ロータに電気伝導体を用いるインダクションモータ(IM)、
(b)ロータの表面に永久磁石を貼り付けた表面磁石型(Surface Permanent Magnet; SPM)モータ、
(c)ロータの内部に永久磁石が埋め込まれた磁石埋込型(Interior Permanent Magnet; IPM)モータ
などの様々な構造を持つものが知られている。
内部に磁石が埋め込まれたロータと、
回転時にロータシャフトに+z軸方向の軸方向力が発生するように、スロットにスキューを設けたステータと、
ロータシャフトを−z軸方向に付勢するバネ機構と、
モータの回転数に応じて軸方向のロータシャフト保持位置を変えるガバナ機構と
を備えたラジアルモータが開示されている。
(a)低速回転時には、ロータシャフトの軸方向力(+z方向)がバネ機構のセット荷重(−z方向)より大きくなるため、ロータシャフトが+z方向に変位し、ロータシャフトの圧力板がバネホルダに接触したところで変位が停止する点、
(b)高速回転時には、ロータシャフトの軸方向力がバネ機構のセット荷重より小さくなり、かつ遠心力の増大によってガバナ機構が開くために、ロータシャフトが−z方向に変位する点、及び、
(c)高速回転時にロータシャフトが−z方向に変位することによって、ギャップ磁束が減少し、弱め界磁を実現できる点
が記載されている。
(a)円筒形を有する磁石面の外周面の円周方向に沿って、交互にN極とS極に着磁し、
(b)磁石本体の下側の端面寄りの部分に急峻な傾斜(スキュー)を付し、
(c)磁石本体の上側の端面寄りの部分及び中央の部分では穏やかな傾斜を設けた
リング型永久磁石が開示されている。
同文献には、ステータ及びロータの双方に傾斜の異なる領域を設けることによって、コギングトルクを低減することができる点が記載されている。
(a)高保磁力部のスキュー角度を最適スキュー角度理論値もしくはそれ以上とし、
(b)低保磁力部のスキュー角度を最適スキュー角度理論値よりも小さいスキュー角度で
スキュー着磁をする円筒又はリング磁石の着磁方法が開示されている。
同文献には、
(A)円筒又はリング磁石は、軸方向の磁石特性が一様ではないため、一様にスキュー着磁してしまうと、コギングトルクを十分に低減できない点、及び、
(B)一様でない磁石特性に合わせて、スキュー角度を理論値に対して増減させると、コギングトルクを十分に低減できる点
が記載されている。
(1)前記可変磁束モータは、
2n個(n≧1)の磁極を備えたインナーロータと、
前記インナーロータに対して回転磁界を作用させるためのコイルが内蔵されたアウターステータと、
前記アウターステータを前記インナーロータの軸方向に沿って相対移動させる相対移動手段と
を備えている。
(2)前記インナーロータは、前記アウターステータの内周面に対向する表面に接合されたリング磁石を備え、
前記リング磁石は、前記インナーロータの円周方向に沿って交互にN極又はS極に着磁されており、
前記リング磁石の軸方向の長さは、前記アウターステータの軸方向の長さの2倍以上である。
(3)前記リング磁石は、
0°≦θ≦1°(但し、θはスキュー角)であるp個(p≧1)の高磁束領域(Ap)と、
1°<θ≦180°/nであるq個(q≧1)の中・低磁束領域(Bq)と
を備えている。
但し、「前記スキュー角θ」とは、
(a)前記アウターステータを前記インナーロータの軸方向の任意の位置に固定し、
(b)前記アウターステータの上端を通り、かつ前記インナーロータの軸方向に対して垂直な平面と前記リング磁石の表面に形成された前記磁極間の1つの境界線との交点(A点)、並びに、前記アウターステータの下端を通り、かつ前記インナーロータの軸方向に対して垂直な平面と前記境界線との交点(B点)を求め、
(c)前記A点及び前記B点を前記インナーロータの軸方向に対して垂直な断面に投影した場合において、
前記インナーロータの中心(C点)と投影された前記A点とを結ぶ線(AC線)と、前記C点と投影された前記B点とを結ぶ線(BC線)とのなす角をいう。
例えば、インナーロータの表面に、
(a)低速域で最高効率が得られる領域(第1高磁束領域(A1))、
(b)中速域で最高効率が得られる領域(第1中・低磁束領域(B1))、及び
(c)高速域で最高効率が得られる領域(第2中・低磁束領域(B2))
を設けた場合において、モータの回転数に応じてアウターステータの位置を制御すると、広い回転数域で使用することができ、かつ、広い回転数域に渡って高効率が得られる。
[1. 可変磁束モータ]
本発明に係る可変磁束モータは、以下の構成を備えている。
(1)前記可変磁束モータは、
2n個(n≧1)の磁極を備えたインナーロータと、
前記インナーロータに対して回転磁界を作用させるためのコイルが内蔵されたアウターステータと、
前記アウターステータを前記インナーロータの軸方向に沿って相対移動させる相対移動手段と
を備えている。
(2)前記インナーロータは、前記アウターステータの内周面に対向する表面に接合されたリング磁石を備え、
前記リング磁石は、前記インナーロータの円周方向に沿って交互にN極又はS極に着磁されており、
前記リング磁石の軸方向の長さは、前記アウターステータの軸方向の長さの2倍以上である。
(3)前記リング磁石は、
0°≦θ≦1°(但し、θはスキュー角)であるp個(p≧1)の高磁束領域(Ap)と、
1°<θ≦180°/nであるq個(q≧1)の中・低磁束領域(Bq)と
を備えている。
[1.1.1. 磁極数]
インナーロータは、2n個(n≧1)の磁極を備えている。磁極の数は、特に限定されるものではなく、目的に応じて最適な個数を選択することができる。一般に、磁極の数が多くなるほど、コイルに鎖交する磁束の切替回数が増える。各極における磁石量の減り分を考慮しても、同じ回転数では、磁極の数が多くなるほど、トルク、及び発電量が向上する。このような効果を得るためには、磁極の数は、4極以上が好ましい。磁極の数は、さらに好ましくは、8極以上である。
一方、磁極の数が多くなりすぎると、ステータ形状と巻線が複雑になり、モータ体格が肥大化するという問題があり、特に小型モータで顕著になる。従って、磁極の数は、16極以下が好ましい。磁極の数は、さらに好ましくは、12極以下である。
インナーロータは、アウターステータの内周面に対向する表面に接合されたリング磁石を備えている。また、リング磁石は、インナーロータの円周方向に沿って交互にN極又はS極に着磁されている。
本発明において、リング磁石の軸方向の長さ(HR)は、アウターステータの軸方向の長さ(HS)の2倍以上である。この点が、従来とは異なる。一般に、HRが長くなるほど、スキュー角θの可変制御が容易となる。HRは、好ましくは、HSの3倍以上である。
一方、HRを必要以上に大きくしても、実益がない。従って、HRは、HSの20倍以下が好ましい。HRは、さらに好ましくは、HSの10倍以下である。
本発明において、リング磁石は、
(a)0°≦θ≦1°(但し、θはスキュー角)であるp個(p≧1)の高磁束領域(Ap)と、
(b)1°<θ≦180°/nであるq個(q≧1)の中・低磁束領域(Bq)と
を備えている。
(a)アウターステータ40をインナーロータ20の軸方向の任意の位置に固定する。
(b)アウターステータ40の上端を通り、かつインナーロータ20の軸方向に対して垂直な平面とリング磁石26の表面に形成された磁極間の1つの境界線26aとの交点(A点)、並びに、アウターステータ40の下端を通り、かつインナーロータ20の軸方向に対して垂直な平面と境界線26aとの交点(B点)を求める。
(c)A点及びB点をインナーロータ20の軸方向に対して垂直な断面に投影する。
(d)インナーロータ20の中心(C点)と投影されたA点とを結ぶ線(AC線)と、C点と投影されたB点とを結ぶ線(BC線)とのなす角を、スキュー角θと定義する。
最大のギャップ磁束を得るためには、スキュー角θは、0°が好ましい。スキュー角θが0°より大きい場合であっても、相対的に大きなギャップ磁束が得られる。しかしながら、スキュー角θが過度に大きくなると、低速回転域において高トルクが得られない。従って、高磁束領域(Ap)のスキュー角θは、1°以下が好ましい。スキュー角θは、さらに好ましくは、0.5°以下である。
誘起電圧(逆起電力)を小さくするためには、中・低磁束領域(Bq)のスキュー角θは大きいほど良い。具体的には、中・低磁束領域(Bq)のスキュー角θは、1°超が好ましい。スキュー角θは、さらに好ましくは、45°/n(=方形波着磁の最大誘起電圧が25%となる角度)以上である。
一方、スキュー角θが1個の磁極当たりの角度(=360°/2n)を超えると、ギャップ磁束がかえって増大する。従って、中・低磁束領域(Bq)のスキュー角θは、180°/n以下が好ましい。
(a)前記θが単調増加している単調増加領域、及び/又は、
(b)前記θが単調減少している単調減少領域
を備えているのが好ましい。
0°≦θ≦1°である第1高磁束領域(A1)と、
1°<θ<120°/nである第1中・低磁束領域(B1)と、
120°/n≦θ≦180°/nである第2中・低磁束領域(B2)と、
を備えているのが好ましい。
第1中・低磁束領域(B1)のスキュー角θは、さらに好ましくは、60°/n≦θ<120°/nである。
また、「120°/n(=2×360°/(3×2n))」は、同一回転数で比較したときに、A1領域で発生する誘起電圧の約1/3の誘起電圧となるスキュー角を表す。
0°≦θ≦1°である第1高磁束領域(A1)と、
15°≦θ<30°である第1中・低磁束領域(B1)と、
30°≦θ≦45°である第2中・低磁束領域(B2)と、
を備えているものが好ましい。
図2(a)は、スキュー角θがリング磁石26の上端から下端に向かって単調増加している例であり、磁極間の境界線26aは、曲線状に変化している。リング磁石26の上端の領域は、スキュー角θが最小となる高磁束領域(Ap)である。リング磁石26の下端の領域は、スキュー角θが最大となる中・低磁束領域(Bq)である。さらに、リング磁石26の中央の領域は、スキュー角θがApとBqの中間の値となる中・低磁束領域(Bq')である。
アウターステータは、中央にインナーロータを挿入するための貫通穴を備えており、貫通穴の内表面には、界磁コイルの鉄芯となるティースが放射状に配置されている。また、アウターステータは、インナーロータに対して回転磁界を作用させるためのコイルが内蔵されている。本発明において、アウターステータの構造(例えば、ティースの構造、コイルの巻き線方式など)は、特に限定されるものではなく、目的に応じて最適な構造を選択することができる。
本発明に係る可変磁束モータは、アウターステータをインナーロータの軸方向に沿って相対移動させる相対移動手段を備えている。相対移動手段の構造は、アウターステータを相対移動させることが可能な限りにおいて、特に限定されない。相対移動手段は、インナーロータの軸方向の移動を制限し、アウターロータをインナーロータの軸方向に沿って移動可能なものでも良い。あるいは、相対移動手段は、アウターロータの軸方向の移動を制限し、インナーロータを軸方向に移動させるものでも良い。インナーロータと負荷との接続を容易にするには、相対移動手段は、アウターステータをインナーロータの軸方向に沿って移動させるものが好ましい。
[2.1. 構成]
図3に、本発明の一実施の形態に係る可変磁束モータの断面模式図を示す。図3において、可変磁束モータ10は、インナーロータ20と、アウターステータ40と、相対移動手段50とを備えている。インナーロータ20及びアウターステータ40は、可変磁束モータ10の主電動機を構成する。
左右のブラケット30、34は、リニア移動ガイド36、38で連結されている。リニア移動ガイド36、38は、アウターステータ40を軸方向に移動させる相対移動手段50の一部を構成する。
図4に、可変磁束モータの制御方法を説明するためのブロック図を示す。まず、図示しない各種センサーを用いて、主電動機の現在の情報(例えば、主電動機の回転情報、主電動機の出力トルク情報、主電動機の固定子(アウターステータ40)の位置情報など)を取得し、コントローラに入力する。また、別のセンサー(図示せず)を用いて、主電動機の出力先操作情報(例えば、電気自動車の場合は、アクセルやブレーキの操作情報)を取得し、コントローラに入力する。
図5に、従来のIPMモータの回転数(RPM)とトルク(Nm)との関係を示す(出展: Evaluation of the 2010 Toyota Prius hybrid synergy drive syste. Thecnical report, Oak Ridge National Laboratory (2011))。IPMモータは、広い回転数域で使用することができ、かつ、トルクも大きいことで知られている。しかしながら、従来のモータは、いずれも最高効率域が1箇所のみである。そのため、回転数及び/又はトルクが最高効率域を外れると、効率が低下するという問題がある。図5に示す例では、回転数が約5,000rpm、トルクが約60Nmである領域が最高効率域であり、ほぼ100%に近い効率が得られる。しかしながら、この領域を外れると、効率は低下する。
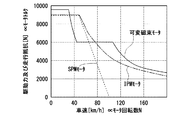
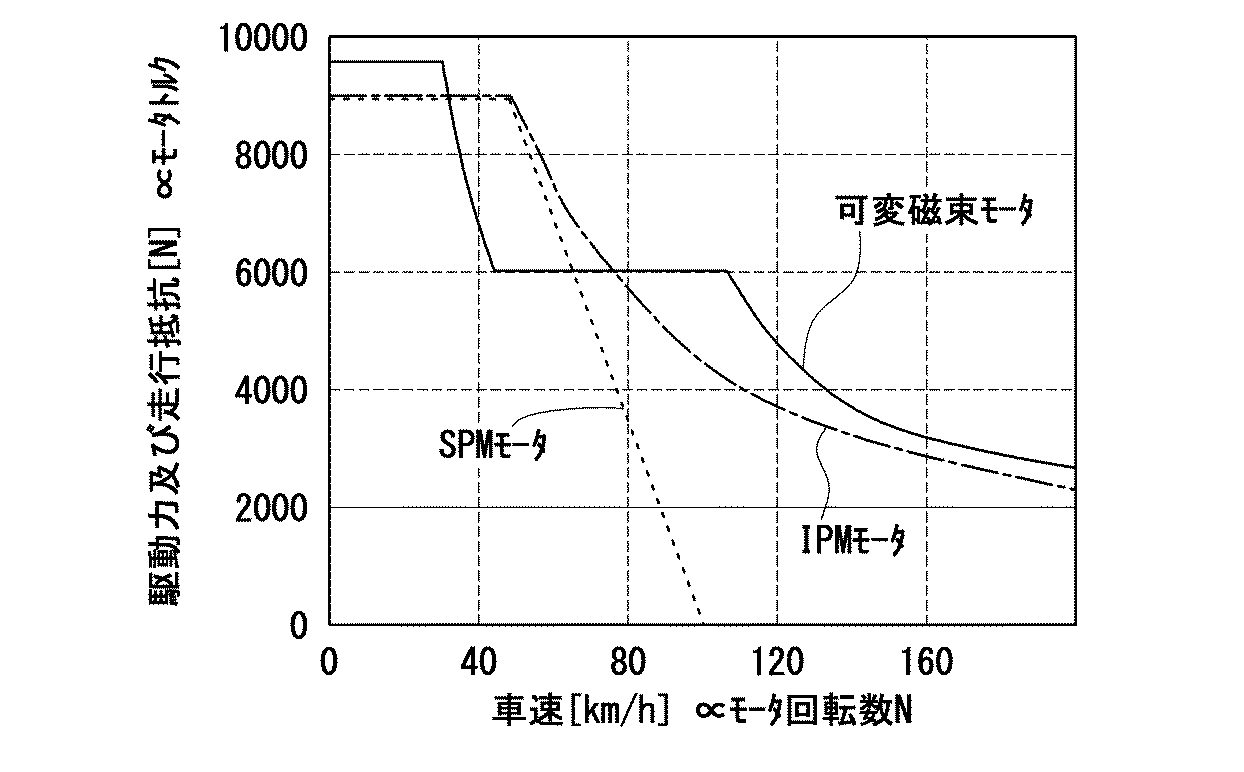
一方、中・高速域においては、高回転数に特化した機器定数が選択されている。そのため、30〜70km/h程度の中速域において、トルクはSPMモータよりも低くなっている。しかしながら、70km/h以上の高速域においては、従来のIPMモータよりも高いトルクが得られている。
これに対し、本発明に係る可変磁束モータは、複数個の機器定数を持ち、回転数域に応じて最適な機器定数を選択することができる。そのため、機器定数の設定及び選択を最適化すると、その効率は、全回転数域においてIPMモータのそれを超える。
例えば、インナーロータの表面に、
(a)低速域で最高効率が得られる領域(第1高磁束領域(A1))、
(b)中速域で最高効率が得られる領域(第1中・低磁束領域(B1))、及び
(c)高速域で最高効率が得られる領域(第2中・低磁束領域(B2))
を設けた場合において、モータの回転数に応じてアウターステータの位置を制御すると、広い回転数域で使用することができ、かつ、広い回転数域に渡って高効率が得られる。
[1. 試験方法]
リング磁石26を着磁する際に部位によってスキュー角θを変化させ、リング磁石26の表面に以下の3つの磁束領域を形成した。これを図3に示す可変磁束モータ10に組み込んだ。
(a)スキュー角θが0°である第1高磁束領域(A1)。
(b)スキュー角θが15°である第1中・低磁束領域(B1)。
(c)スキュー角θが30°である第2中・低磁束領域(B2)。
(1)対応回転数域を4等分割し、低速側から数えて2、3、4番目に相当する回転数を選択する。例えば、対応回転数域が0〜5000rpmである場合、回転数として、1250rpm、2500rpm、及び3750rpmを選択する。以下、このようにして選択された回転数を「平均対象回転数」という。
(2)平均対象回転数におけるトルクの範囲(0トルクから最大トルクまで)を4等分割し、低トルク側から数えて2、3、4番目に相当するトルクを選択する。例えば、最大トルクが400Nmである場合(すなわち、平均対象回転数におけるトルクの範囲が0〜400Nmである場合)、トルクとして、100Nm、200Nm、及び300Nmを選択する。以下、このようにして選択したトルクを「平均対象トルク」という。
(3)平均対象回転数と平均対象トルクのマトリックス各9点の動作点における効率をそれぞれ求め、その平均値を「平均効率」とする。
表1に、結果を示す。表1より、以下のことがわかる。
(1)実施例1では、回転数に応じてアウターステータ40の位置を移動させ、スキュー角θを変化させた。そのため、実施例1は、いずれの回転数域においても、比較例1に比べて、最大トルク及び平均効率が高くなった。
(2)比較例1の回転数は、10,000rpmが上限であった。一方、実施例1の回転数は、10,000rpmを超えた。
20 インナーロータ
26 リング磁石
40 アウターステータ
50 相対移動手段
Claims (1)
- 以下の構成を備えた可変磁束モータ。
(1)前記可変磁束モータは、
2n個(n≧1)の磁極を備えたインナーロータと、
前記インナーロータに対して回転磁界を作用させるためのコイルが内蔵されたアウターステータと、
前記アウターステータを前記インナーロータの軸方向に沿って相対移動させる相対移動手段と
を備えている。
(2)前記インナーロータは、前記アウターステータの内周面に対向する表面に接合され
たリング磁石を備え、
前記リング磁石は、前記インナーロータの円周方向に沿って交互にN極又はS極に着磁
され、前記N極と前記S極の間の境界線の前記リング磁石における周方向の位置は、前記
リング磁石の一端から他端に向かって連続的な単調変化となっており、
前記リング磁石の軸方向の長さは、前記アウターステータの軸方向の長さの2倍以上で
ある。
(3)前記相対移動により、スキュー角θは、
0°≦θ≦1°であるp個(p≧1)の領域Apと、1°<θ≦180/nであるq個(q≧1)の領域Bqとの間で変化する。
但し、「前記スキュー角θ」とは、
(a)前記アウターステータを前記インナーロータの軸方向の任意の位置(ただし、前記
アウターステータの一端及び他端は、前記インナーロータの一端及び他端を超えない)に
固定し、
(b)前記アウターステータの一端を通り、かつ前記インナーロータの軸方向に対して垂
直な平面と前記リング磁石の表面に形成された前記磁極間の1つの境界線との交点(A点
)、並びに、前記アウターステータの他端を通り、かつ前記インナーロータの軸方向に対
して垂直な平面と前記境界線との交点(B点)を求め、
(c)前記A点及び前記B点を前記インナーロータの軸方向に対して垂直な断面に、前
記インナーロータの上方から投影した場合において、
前記インナーロータの中心(C点)と投影された前記A点とを結ぶ線(AC線)と、前
記C点と投影された前記B点とを結ぶ線(BC線)とのなす角をいう。
(4)前記アウターステータの一端が軸方向において前記インナーロータの一端と同じ位置にある状態から、前記アウターステータの他端が軸方向において前記インナーロータの他端と同じ位置にある状態まで、前記相対移動させた際の前記スキュー角θの変化が、下記のいずれかである。
(a)前記アウターステータの一端が、軸方向において前記インナーロータの一端と同じ位置にあるときのスキュー角θが領域Apであり、この位置からの前記相対移動により、スキュー角θが単調増加し、前記アウターステータの他端が、軸方向において前記インナーロータの他端と同じ位置にあるときのスキュー角θが領域Bqとなる。
(b)前記アウターステータの一端が、軸方向において前記インナーロータの一端と同じ位置にあるときのスキュー角θが領域Apであり、この位置からの前記相対移動により、スキュー角θが単調増加して領域Bqとなり、その後、領域Apとなり、その後、領域Bqとなった後、単調減少し、前記アウターステータの他端が、軸方向において前記インナーロータの他端と同じ位置にあるときのスキュー角θが領域Apとなる。
(c)前記アウターステータの一端が、軸方向において前記インナーロータの一端と同じ位置にあるときのスキュー角θが領域Bqであり、この位置からの前記相対移動により、スキュー角θが単調減少し領域Apとなった後、単調増加し、前記アウターステータの他端が、軸方向において前記インナーロータの他端と同じ位置にあるときのスキュー角θが領域Bqとなる。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016140198A JP6986337B2 (ja) | 2016-07-15 | 2016-07-15 | 可変磁束モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016140198A JP6986337B2 (ja) | 2016-07-15 | 2016-07-15 | 可変磁束モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018011473A JP2018011473A (ja) | 2018-01-18 |
| JP6986337B2 true JP6986337B2 (ja) | 2021-12-22 |
Family
ID=60993543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016140198A Active JP6986337B2 (ja) | 2016-07-15 | 2016-07-15 | 可変磁束モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6986337B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102307818B1 (ko) * | 2020-01-17 | 2021-10-01 | 계명대학교 산학협력단 | 스테이터 시프팅을 이용한 전동기 장치 및 그 제어 방법 |
-
2016
- 2016-07-15 JP JP2016140198A patent/JP6986337B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018011473A (ja) | 2018-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4623471B2 (ja) | 回転電動機 | |
| Rasmussen et al. | Motor integrated permanent magnet gear with a wide torque-speed range | |
| CN105305751B (zh) | 双定子无轴承五相无刷直流电机 | |
| US20120038236A1 (en) | Permanent Magnet Rotating Electric Machine and Electric Car Using the Same | |
| US7969057B2 (en) | Synchronous motor with rotor having suitably-arranged field coil, permanent magnets, and salient-pole structure | |
| JP2009207333A (ja) | ランデル型ロータ型モータ | |
| JP2002262534A (ja) | 回転電機及びそれを搭載した車両 | |
| CN105141092A (zh) | 一种磁齿轮型双定子混合永磁记忆电机 | |
| JP2012130223A (ja) | 同期モータ | |
| JP2000350393A (ja) | 永久磁石モータ | |
| CN105141091A (zh) | 一种双定子双功率绕组聚磁式混合永磁记忆电机 | |
| JP4635829B2 (ja) | 永久磁石式電動機 | |
| JP5842852B2 (ja) | 回転電機制御システム及び回転電機の制御方法 | |
| JP6986337B2 (ja) | 可変磁束モータ | |
| CN105914981B (zh) | 一种电动车混合励磁轮毂电机 | |
| JP2004166369A (ja) | 回転電機 | |
| JPH1146471A (ja) | 磁石式ブラシレス電動機 | |
| JP2010148257A (ja) | モータ | |
| JP2009065803A (ja) | 磁石同期機 | |
| WO2015186442A1 (ja) | 磁石励磁回転電機システム | |
| US11705796B2 (en) | Electric motor | |
| JP4459886B2 (ja) | ステータおよびモータ | |
| JP2002191157A (ja) | 永久磁石併用同期回転機 | |
| JP2007209197A (ja) | Ipmモータ | |
| JP4808529B2 (ja) | 電動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191224 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200422 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200422 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200511 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200512 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200722 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200728 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20201027 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210308 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20210420 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20210629 |
|
| C302 | Record of communication |
Free format text: JAPANESE INTERMEDIATE CODE: C302 Effective date: 20210728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210818 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20210818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210820 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20211012 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20211019 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20211124 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20211124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6986337 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |