JP6983713B2 - 光学式センサ、およびその光学式センサを備えた装置 - Google Patents
光学式センサ、およびその光学式センサを備えた装置 Download PDFInfo
- Publication number
- JP6983713B2 JP6983713B2 JP2018072602A JP2018072602A JP6983713B2 JP 6983713 B2 JP6983713 B2 JP 6983713B2 JP 2018072602 A JP2018072602 A JP 2018072602A JP 2018072602 A JP2018072602 A JP 2018072602A JP 6983713 B2 JP6983713 B2 JP 6983713B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- optical sensor
- resin
- sensor according
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 41
- 238000001514 detection method Methods 0.000 claims description 73
- 229920005989 resin Polymers 0.000 claims description 33
- 239000011347 resin Substances 0.000 claims description 33
- 239000000463 material Substances 0.000 claims description 16
- 230000001133 acceleration Effects 0.000 claims description 15
- 230000009471 action Effects 0.000 claims description 11
- 229920002050 silicone resin Polymers 0.000 claims description 3
- 239000012790 adhesive layer Substances 0.000 claims description 2
- 239000003822 epoxy resin Substances 0.000 claims description 2
- 239000011521 glass Substances 0.000 claims description 2
- 239000010410 layer Substances 0.000 claims description 2
- 229920000647 polyepoxide Polymers 0.000 claims description 2
- 239000004925 Acrylic resin Substances 0.000 claims 1
- 229920000178 Acrylic resin Polymers 0.000 claims 1
- 229920000728 polyester Polymers 0.000 claims 1
- 229920002803 thermoplastic polyurethane Polymers 0.000 claims 1
- 238000006073 displacement reaction Methods 0.000 description 37
- 239000011159 matrix material Substances 0.000 description 8
- 239000006059 cover glass Substances 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000011109 contamination Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 238000001723 curing Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 238000003848 UV Light-Curing Methods 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229920001225 polyester resin Polymers 0.000 description 1
- 239000004645 polyester resin Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229920001187 thermosetting polymer Polymers 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/16—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge
- G01B11/161—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge by interferometric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/24—Measuring force or stress, in general by measuring variations of optical properties of material when it is stressed, e.g. by photoelastic stress analysis using infrared, visible light, ultraviolet
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/166—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using photoelectric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/226—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to manipulators, e.g. the force due to gripping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/093—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by photoelectric pick-up
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Manipulator (AREA)
Description
基部と、作用部と、
前記基部と前記作用部のいずれか一方に反射体、他方に光源と受光素子を備えた検出部、を有し、
前記検出部と前記反射体の間が光透過性材料によって満たされており、
前記光源から出射し前記反射体によって反射された光を前記受光素子で検出することで力および/または加速度を検知することを特徴とする。
本発明に係る光学式センサは、基部と、作用部と、前記基部と前記作用部のいずれか一方に反射体、他方に光源と受光素子を備えた検出部、を有している。検出部と反射体の間が光透過性材料によって満たされており、光源から出射し反射体によって反射された光を受光素子で検出することで力および/または加速度を検知する。光透過性材料はさまざまな材料を用いて良いが、力あるいは加速度を検知するにあたり適度な弾性を有するという観点で樹脂であることが好ましい。
S1(A)=S1(A+)−S1(A−) … (1)
S1(B)=S1(B+)−S1(B−) … (2)
Φ=ATAN2[S1(A),S1(B)] … (3)
式(3)において、ATAN2[Y,X]は、象限を判別して0〜2π位相に変換する逆正接演算関数である。
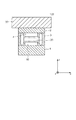
光学式センサの一例として、本実施形態における加速度センサ102の構成を図3に示す。加速度センサ102は、実施形態1の構成に加え、おもり部材30が作用部2に固定されている。基部1は加速度の測定対象に固定される。センサ部102は、図中X方向に印加される加速度を検出し、加速度に応じた信号を出力する。このおもり部材を設けることで力あるいは加速度の感度を向上させ、また光学式センサ自体の共振周波数を調整することが可能である。
光学式センサの一例として、本実施形態における加速度センサ102、速度センサ102、振動センサ102の構成を図4(a)に示す。第2の実施形態と同様、おもり部材30が作用部2に固定されている。
光学式センサの一例として、本実施形態は、6軸力覚センサへの適用例である。

光学式センサの一例として本実施形態は6軸力覚センサの別の適用例である。本実施形態におけるセンサ101の機構部、回路基板の構成は第4の実施形態のものと同様である。
光学式センサの一例として本実施形態は6軸力覚センサの別の適用例である。
本発明の光学式センサを備えた装置の一例として、次に、図11を参照して、本発明の実施形態7におけるロボットアーム搬送装置について説明する。図11は、本実施形態におけるロボットアーム搬送装置400の構成図であり、実施形態4〜6で説明したセンサ101を備えたロボットアーム搬送装置400を示している。
2 作用部
3 支持部材
4 スケール
10 検出部
20 光透過性樹脂
101 センサ
Claims (12)
- 基部と、
作用部と、
前記基部と前記作用部のいずれか一方に反射体、前記基部と前記作用部の他方に光源と受光素子、を備えた検出部と、
を有し、
前記検出部と前記反射体の空間は、光透過性材料と空気の界面が含まれないように、前記光透過性材料によって満たされ、
前記空間には、前記光源から出て、前記検出部で反射され、前記受光素子に至る光路が含まれ、及び 前記光源から出射し前記反射体によって反射された光を前記受光素子で検出することで力および加速度の少なくともいずれか一方を検知することを特徴とする光学式センサ。 - 前記基部と前記作用部とを支持する支持部材をさらに備えることを特徴とする請求項1に記載の光学式センサ。
- 前記作用部に設けられたおもり部材をさらに備えることを特徴とする請求項1または2に記載の光学式センサ。
- 前記光透過性材料の屈折率は1.2以上2.0以下である請求項1乃至3のいずれか1項に記載の光学式センサ。
- 前記光透過性材料は可視光を遮蔽し、赤外光を透過する請求項1乃至4のいずれか1項に記載の光学式センサ。
- 前記光透過性材料は光透過性樹脂であることを特徴とする請求項1乃至5のいずれか1項に記載の光学式センサ。
- 前記光透過性樹脂は、シリコーン樹脂、ウレタン系樹脂、アクリル系樹脂、エポキシ系樹脂あるいはポリエステルである請求項6に記載の光学式センサ。
- 前記光透過性樹脂は透明粘着層と透明樹脂層を有するゲルシートであることを特徴とする請求項6または7に記載の光学式センサ。
- 前記受光素子はアレイ状に構成されており、前記反射体は回折格子を備える請求項1乃至8のいずれか1項に記載の光学式センサ。
- 前記光透過性材料は、樹脂又はガラスであることを特徴とする請求項1乃至9のいずれか1項に記載の光学式センサ。
- 動作可能な可動部と、
請求項1乃至10のいずれか1項に記載の光学式センサと、
前記可動部を制御する制御部と、を有することを特徴とする装置。 - 前記可動部はロボットアームである請求項11記載の装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018072602A JP6983713B2 (ja) | 2018-04-04 | 2018-04-04 | 光学式センサ、およびその光学式センサを備えた装置 |
| US16/372,208 US10969284B2 (en) | 2018-04-04 | 2019-04-01 | Optical sensor and apparatus including optical sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018072602A JP6983713B2 (ja) | 2018-04-04 | 2018-04-04 | 光学式センサ、およびその光学式センサを備えた装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019184315A JP2019184315A (ja) | 2019-10-24 |
| JP2019184315A5 JP2019184315A5 (ja) | 2021-04-08 |
| JP6983713B2 true JP6983713B2 (ja) | 2021-12-17 |
Family
ID=68095973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018072602A Active JP6983713B2 (ja) | 2018-04-04 | 2018-04-04 | 光学式センサ、およびその光学式センサを備えた装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10969284B2 (ja) |
| JP (1) | JP6983713B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7223354B2 (ja) * | 2019-10-24 | 2023-02-16 | 株式会社安川電機 | トルクセンサ、ロボット、トルク算出方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60209128A (ja) * | 1984-04-02 | 1985-10-21 | Oki Electric Ind Co Ltd | 感圧センサ |
| JPS6141938A (ja) * | 1984-08-03 | 1986-02-28 | Oki Electric Ind Co Ltd | 二次元感圧センサ |
| JPS61228681A (ja) * | 1985-04-01 | 1986-10-11 | Sharp Corp | 光結合半導体装置 |
| US20090159799A1 (en) * | 2007-12-19 | 2009-06-25 | Spectral Instruments, Inc. | Color infrared light sensor, camera, and method for capturing images |
| WO2009089236A2 (en) * | 2008-01-08 | 2009-07-16 | Certainteed Corporation | Photovoltaic module |
| JP5489538B2 (ja) * | 2009-06-03 | 2014-05-14 | キヤノン株式会社 | 力覚センサ |
| JP5948025B2 (ja) * | 2010-08-06 | 2016-07-06 | 株式会社半導体エネルギー研究所 | 液晶表示装置 |
| JP5602582B2 (ja) * | 2010-10-27 | 2014-10-08 | キヤノン株式会社 | 力覚センサ |
| US9377900B1 (en) * | 2012-06-18 | 2016-06-28 | Amazon Technologies, Inc. | Optical touch sensor |
| JP2015197357A (ja) * | 2014-04-01 | 2015-11-09 | キヤノン株式会社 | 光学式力角センサおよびこれを用いた装置 |
| US10444866B2 (en) * | 2016-11-14 | 2019-10-15 | Microsoft Technology Licensing, Llc | Force sensor for a stylus |
-
2018
- 2018-04-04 JP JP2018072602A patent/JP6983713B2/ja active Active
-
2019
- 2019-04-01 US US16/372,208 patent/US10969284B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019184315A (ja) | 2019-10-24 |
| US20190310151A1 (en) | 2019-10-10 |
| US10969284B2 (en) | 2021-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11002625B2 (en) | Multi-axis force sensor | |
| JP5489538B2 (ja) | 力覚センサ | |
| US9366587B2 (en) | Optical force sensor and apparatus using optical force sensor | |
| CN104040313B (zh) | 传感器装置 | |
| JP6843726B2 (ja) | 力覚センサ及びロボット | |
| US11402285B2 (en) | Force sensor and device provided with force sensor | |
| Hendrich et al. | 3D printed low-cost force-torque sensors | |
| WO2021033455A1 (ja) | 力センサ、及びそれを含むセンサアレイ並びに把持装置 | |
| JP6983713B2 (ja) | 光学式センサ、およびその光学式センサを備えた装置 | |
| WO2021085098A1 (ja) | 光学式センサおよび光学式センサモジュール | |
| JP5606270B2 (ja) | 力覚センサ | |
| US20220364938A1 (en) | Force sensor and robot including same | |
| US8159681B2 (en) | Measuring device for determining the relative offset between two components | |
| Frishman et al. | A Multi-Axis FBG-Based Tactile Sensor for Gripping in Space | |
| US20230072012A1 (en) | Multi-axis fiber bragg grating sensors and systems | |
| JP2005114717A (ja) | 光学式エンコーダ | |
| JP2023033106A (ja) | 光受信ユニット | |
| JPH1139088A (ja) | 光学式入力装置 | |
| JPH09236406A (ja) | 位置検出デバイスおよび位置検出装置 | |
| CN114815225A (zh) | 一种基于柔性万向支撑和压电陶瓷组成的快速反射镜系统 | |
| JP2011163942A (ja) | 光ファイバセンサ、圧力センサ及びエンドエフェクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210301 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210301 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211026 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211124 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6983713 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |