JP6955854B2 - 車両用制御装置 - Google Patents
車両用制御装置 Download PDFInfo
- Publication number
- JP6955854B2 JP6955854B2 JP2016190573A JP2016190573A JP6955854B2 JP 6955854 B2 JP6955854 B2 JP 6955854B2 JP 2016190573 A JP2016190573 A JP 2016190573A JP 2016190573 A JP2016190573 A JP 2016190573A JP 6955854 B2 JP6955854 B2 JP 6955854B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- unit
- occupant
- movement
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Braking Elements And Transmission Devices (AREA)
- Hybrid Electric Vehicles (AREA)
- Regulating Braking Force (AREA)
- Mechanical Control Devices (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
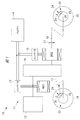
以下、本発明の実施の形態を図面に基づいて詳細に説明する。図1はハイブリッド車両10が備えるパワーユニット11の一例を示す概略図である。
続いて、ハイブリッド車両10の制御系30について説明する。図2はハイブリッド車両10の制御系30の一例を示すブロック図である。なお、図2において、図1に示す部品と同じ部品については、同一の符号を付してその説明を省略する。
ところで、ハイブリッド車両10を壁等に寄せて駐車する場合などには、アクセルペダルやブレーキペダルの繊細な操作が乗員に対して求められる。特に、上り坂や下り坂においては、車両が重力で移動する虞があることから、より繊細なアクセル操作やブレーキ操作が求められていた。このようなアクセル操作やブレーキ操作を解消する観点から、ハイブリッド車両10には、制御モードの1つとして、アクセル操作やブレーキ操作を行わずに車両を設定距離で移動させる移動モードが設定されている。そして、ハイブリッド車両10には、移動モードを実行するため、本発明の一実施の形態である車両用制御装置50が設けられている。
以下、制御ユニット31によって実行される移動モードについて説明する。図4は移動モードの実行および停止の判定手順の一例を示すフローチャートである。また、図5は移動モードの実行手順の一例を示すフローチャートである。
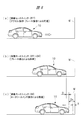
図8(a)〜(c)は移動モードの実行状況の一例を示す説明図である。図8(a)〜(c)には、前進するハイブリッド車両10を壁Wに近づけて停止させる状況が示されている。
12 エンジン
18 前輪(車輪)
20 後輪(車輪)
22 電動ブレーキユニット(ブレーキ機構)
31 制御ユニット
42 モータ制御部
44 ブレーキ制御部
50 車両用制御装置
51 モード開始判定部
52 移動距離設定部(距離設定部)
53 車両移動制御部(モータ制御部,ブレーキ制御部)
63 ロータリースイッチ(手動操作部)
72 操作感付与機構(操作感付与部)
MG2 第2モータジェネレータ(走行用モータ)
D 移動距離
D1 移動距離
D2 移動距離
Claims (4)
- 車両を設定距離で移動させる移動モードを実行する車両用制御装置であって、
乗員の操作に基づいて、前記移動モードを開始するモード開始判定部と、
乗員に回転操作される操作ホイールを備え、前記移動モードで車両を移動させる際に前記操作ホイールが操作される手動操作部と、
前記手動操作部が備える前記操作ホイールの1ノッチの操作毎に、乗員に操作感を与える操作感付与部と、
前記手動操作部が備える前記操作ホイールの操作ノッチ数に基づいて、前記車両の移動距離を設定する距離設定部と、
前記距離設定部によって前記移動距離が設定されると、前記移動距離に基づいて走行用モータを回転させるモータ制御部と、
車輪を制動する制動状態にブレーキ機構を制御し、前記車輪を解放する解放状態に前記ブレーキ機構を制御するブレーキ制御部と、
を有し、
前記ブレーキ制御部は、
前記移動モードにおいて前記走行用モータが回転する際に、前記ブレーキ機構を制動状態から解放状態に制御し、
前記移動モードにおいて前記走行用モータが停止する際に、前記ブレーキ機構を解放状態から制動状態に制御する、
車両用制御装置。 - 請求項1に記載の車両用制御装置において、
前記モード開始判定部は、乗員のセレクト操作によって前進レンジまたは後退レンジが選択され、乗員によるアクセル操作が解除され、乗員によるブレーキ操作が行われ、かつ前記車両が停止した状態のもとで、乗員の操作に基づき前記移動モードを開始する、
車両用制御装置。 - 請求項1または2に記載の車両用制御装置において、
前記モータ制御部は、
乗員のセレクト操作によって前進レンジが選択されている場合に、前記移動距離に基づいて前記走行用モータを前進側に回転させ、
乗員のセレクト操作によって後退レンジが選択されている場合に、前記移動距離に基づいて前記走行用モータを後退側に回転させる、
車両用制御装置。 - 請求項1〜3のいずれか1項に記載の車両用制御装置において、
前記車両は、エンジンを備えるハイブリッド車両であり、
前記移動モードにおいて、前記エンジンを停止させる、
車両用制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016190573A JP6955854B2 (ja) | 2016-09-29 | 2016-09-29 | 車両用制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016190573A JP6955854B2 (ja) | 2016-09-29 | 2016-09-29 | 車両用制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018057145A JP2018057145A (ja) | 2018-04-05 |
| JP6955854B2 true JP6955854B2 (ja) | 2021-10-27 |
Family
ID=61837312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016190573A Active JP6955854B2 (ja) | 2016-09-29 | 2016-09-29 | 車両用制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6955854B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020195239A (ja) * | 2019-05-29 | 2020-12-03 | ヤマハ発動機株式会社 | 電動車両 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4133349B2 (ja) * | 2003-01-07 | 2008-08-13 | 株式会社豊田自動織機 | 車両の走行制御装置 |
| JP2005057962A (ja) * | 2003-08-07 | 2005-03-03 | Nissan Motor Co Ltd | モータ制御装置 |
| JP4596254B2 (ja) * | 2005-06-13 | 2010-12-08 | アイシン精機株式会社 | 運転支援装置 |
| JP2016062309A (ja) * | 2014-09-18 | 2016-04-25 | オークマ株式会社 | 手動パルスハンドル |
-
2016
- 2016-09-29 JP JP2016190573A patent/JP6955854B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018057145A (ja) | 2018-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105691399B (zh) | 车辆自动驶出停车位的控制 | |
| CN108454608B (zh) | 在松开制动器的情况下保持发动机自动停止的自定义电驻车制动响应 | |
| US9643606B2 (en) | Vehicle control in traffic conditions | |
| JP6828580B2 (ja) | 車両の制御装置 | |
| EP2902247B1 (en) | Drive device for electric vehicle | |
| CN110778710B (zh) | 用于辅助换出驻车挡的车辆驻车系统及方法 | |
| GB2389090A (en) | Auxiliary drive system opposing downhill motion | |
| CN110576851A (zh) | 驻车辅助装置 | |
| CN106458057B (zh) | 用于控制车辆的动力传动系的方法以及相应的装置和车辆 | |
| JP7256462B2 (ja) | 駐車支援装置 | |
| US10894540B2 (en) | Vehicle control apparatus | |
| CN107097784A (zh) | 一种能实现汽车低速自动通过狭窄道路的系统及方法 | |
| JP2019043209A (ja) | 操舵支援装置 | |
| JP2007083993A (ja) | ハイブリッド車両の発進時段差乗り越え検出装置および段差乗り越え発進時駆動力制御装置 | |
| JP6549958B2 (ja) | 自動運転装置 | |
| JP2019194088A (ja) | 自動車走行制御用ペダルの操作ミス自動修正装置 | |
| JP6955854B2 (ja) | 車両用制御装置 | |
| JP2017095048A (ja) | エネルギーフローの表示装置及び表示方法 | |
| JP2017082884A (ja) | 車両制御装置 | |
| JP5460017B2 (ja) | 電気自動車制御装置 | |
| CN107269835B (zh) | 混合动力车辆的变速控制装置 | |
| JP2010149698A (ja) | 車両用制動力制御装置及びその方法 | |
| JP2005319990A (ja) | 車両の列に後続時の運転補助機能 | |
| JP2009273325A (ja) | ハイブリッド車およびその制御方法 | |
| EP4083475B1 (en) | Vehicle park-lock control method and park-lock control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190612 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200616 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6955854 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |