JP6954907B2 - モータ駆動カートを用いた倉庫自動化システムおよび方法 - Google Patents
モータ駆動カートを用いた倉庫自動化システムおよび方法 Download PDFInfo
- Publication number
- JP6954907B2 JP6954907B2 JP2018529121A JP2018529121A JP6954907B2 JP 6954907 B2 JP6954907 B2 JP 6954907B2 JP 2018529121 A JP2018529121 A JP 2018529121A JP 2018529121 A JP2018529121 A JP 2018529121A JP 6954907 B2 JP6954907 B2 JP 6954907B2
- Authority
- JP
- Japan
- Prior art keywords
- cart
- person
- product
- warehouse
- carts
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
- B65G1/1375—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses the orders being assembled on a commissioning stacker-crane or truck
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS], computer integrated manufacturing [CIM]
- G05B19/4189—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS], computer integrated manufacturing [CIM] characterised by the transport system
- G05B19/41895—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS], computer integrated manufacturing [CIM] characterised by the transport system using automatic guided vehicles [AGV]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS], computer integrated manufacturing [CIM]
- G05B19/4189—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS], computer integrated manufacturing [CIM] characterised by the transport system
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
- G06Q10/0875—Itemisation or classification of parts, supplies or services, e.g. bill of materials
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/32—Operator till task planning
- G05B2219/32392—Warehouse and loading, unloading station and shop and machining centers and in out buffer
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
Description
本願は、米国仮特許出願第62/263,966号(2015年12月7日出願)に対する優先権およびその利益を主張し、上記出願は、その全体が参照により本明細書に引用される。
種々の実施形態では、本発明は、倉庫自動化システムおよび方法に関する。特に、システムおよび方法は、倉庫運営生産性を改良する。
本発明は、例えば、以下を提供する。
(項目1)
倉庫運営生産性を改良するように適合された倉庫自動化システムであって、前記システムは、
倉庫内で製品を運送するための複数のカートと、
コントローラと
を備え、
前記コントローラは、前記複数のカートのうちの第1のものを第1の人物に関連付けることと、前記倉庫の方々に前記第1の人物を先導するように前記第1のカートを制御することとを行うように適合されている、システム。
(項目2)
前記コントローラは、前記第1の人物の通常ペースと等しい速度および前記第1の人物の通常ペースより速い速度のうちの少なくとも1つで前記第1のカートを移動させるようにさらに適合されている、項目1に記載のシステム。
(項目3)
前記コントローラは、前記第1の人物に向けた前記第1のカートの設定を設定することと、第2の人物が前記第1のカートに関連付けられると、前記第1の人物と異なる前記第2の人物に向けた前記第1のカートの設定を設定することとを行うようにさらに適合されている、項目1に記載のシステム。
(項目4)
前記コントローラは、前記第1の人物の能力に基づいて、タスクを前記第1の人物に割り当てるようにさらに適合されている、項目1に記載のシステム。
(項目5)
前記コントローラは、前記第1のカートが前記第1の人物に関連付けられている同じ時に、前記複数のカートのうちの第2のものを前記第1の人物に関連付けるようにさらに適合されている、項目1に記載のシステム。
(項目6)
前記コントローラは、前記第1のカートが前記第1の人物に関連付けられている同じ時に、前記第1のカートを前記第1の人物と異なる第2の人物に関連付けるようにさらに適合されている、項目1に記載のシステム。
(項目7)
前記第1のカートは、製品を受け取るための少なくとも1つの容器を備えている、項目1に記載のシステム。
(項目8)
前記第1のカートは、前記第1のカートを推進するためのモータを備えている、項目1に記載のシステム。
(項目9)
前記第1のカートは、情報を前記第1の人物に通信するための画面上インターフェースおよび画面外インターフェースのうちの少なくとも1つを備えている、項目1に記載のシステム。
(項目10)
前記画面上インターフェースは、前記倉庫内の前記第1のカートの物理的場所、前記倉庫内のある製品の物理的場所、前記第1の人物に割り当てられた現在のタスク、種々のタスク間の時間、前記倉庫における優先順位、および前記第1の人物の成績のうちの少なくとも1つに関する情報を通信するように適合されている、項目9に記載のシステム。
(項目11)
前記画面外インターフェースは、照明およびオーディオ源のうちの少なくとも1つを備えている、項目9に記載のシステム。
(項目12)
前記照明は、製品が配置されるべき、または製品が取り出されるべき前記第1のカート上の容器を識別するように適合されている、項目11に記載のシステム。
(項目13)
前記照明は、前記第1の人物に割り当てられたタスクに応じて異なるように適合されている、項目11に記載のシステム。
(項目14)
前記照明は、前記第1のカートのステータス、前記第1のカートの健全性、前記第1のカートの移動速度、および前記第1のカートの方向における変化のうちの少なくとも1つに関する情報を通信するように適合されている、項目11に記載のシステム。
(項目15)
前記オーディオ源は、前記第1の人物に割り当てられたタスクのステータス、前記第1のカートの複数の人物への近接度、および前記第1のカートのステータスのうちの少なくとも1つに関する情報を通信するように適合されている、項目11に記載のシステム。
(項目16)
前記第1のカートは、少なくとも部分的に、前記第1のカートからの前記第1の人物の距離を識別すること、前記倉庫内における前記第1のカートの位置を決定すること、および前記第1のカートの経路内の障害物を識別することのうちの少なくとも1つのためのセンサを備えている、項目1に記載のシステム。
(項目17)
前記製品を処理するための少なくとも1つのワークステーションをさらに備えている、項目1に記載のシステム。
(項目18)
前記ワークステーションは、ロボットアームを備えている、項目17に記載のシステム。
(項目19)
前記ワークステーションは、仕分けステーション、梱包ステーション、出荷ステーション、キット化ステーション、個人化ステーション、およびギフト包装ステーションから成る群から選択される、項目17に記載のシステム。
(項目20)
前記第1の人物および他の人物のリアルタイム成績指標を表示するためのディスプレイをさらに備えている、項目1に記載のシステム。
(項目21)
(i)前記複数のカート、前記第1の人物、および材料取り扱い機器を監視することと、(ii)各カートの場所を決定することとを行うように適合された複数の頭上カメラをさらに備えている、項目1に記載のシステム。
(項目22)
倉庫の運営生産性を自動化および改良する方法であって、前記方法は、
第1の人物を倉庫内で製品を運送するための複数のカートのうちの第1のものに関連付けるステップと、
前記倉庫の方々に前記第1の人物を先導するように前記第1のカートを制御するステップと
を含む、方法。
(項目23)
前記制御するステップは、前記第1の人物の通常ペースと等しい速度および前記第1の人物の通常ペースより速い速度のうちの少なくとも1つで前記第1のカートを移動させることを含む、項目22に記載の方法。
(項目24)
前記第1の人物が前記第1のカートに関連付けられている同じ時に、前記第1の人物を前記複数のカートのうちの第2のものに関連付けることをさらに含む、項目22に記載の方法。
(項目25)
前記第1の人物が前記第1のカートに関連付けられている同じ時に、前記第1の人物と異なる第2の人物を前記第1のカートに関連付けることをさらに含む、項目22に記載の方法。
(項目26)
前記第1の人物の能力に基づいて、タスクを前記第1の人物に割り当てることをさらに含む、項目22に記載の方法。
(項目27)
前記第1のカート上の容器を照明し、製品が配置されるべき、または製品が取り出されるべき前記容器を識別することをさらに含む、項目22に記載の方法。
(項目28)
前記第1の人物に割り当てられたタスクに応じて、前記第1のカート上の容器を異なるように照明することをさらに含む、項目22に記載の方法。
(項目29)
オーディオ源によって、前記第1の人物に割り当てられたタスクのステータス、前記第1のカートの複数の人物への近接度、および前記第1のカートのステータスのうちの少なくとも1つに関する情報を通信することをさらに含む、項目22に記載の方法。
(項目30)
前記第1の人物および他の人物のリアルタイム成績指標を表示することをさらに含む、項目22に記載の方法。
図2Aは、本発明の一実施形態による、改良型カートシステム100を描写する。図示されるように、多くの場合、業界においてピッキングカートと称される1つ以上の改良型カート102は、1人以上の倉庫作業者104と一緒に倉庫の方々に在庫を移動させることができる。改良型カート102は、製品をピッキングすること、補充すること、移動させること、仕分けること、および計数を行うことまたは確かめること等、大部分の倉庫タスクを補助するために意図される。これらのカート102は、画面106および/またはオンボード視覚的ならびに/もしくは可聴インジケータの使用を通して、作業者104の成績を改善する情報を作業者104に表示することができる。カート102は、必ずしも、1人の特定の作業者104に割り当てられる必要はない。むしろ、1日を通して、随意に、同時に、作業者104を支援する複数のカート102が存在することができる。同様に、単一カート102は、1日のうちに、随意に、同時に、複数の作業者104と作業し得る。システムは、各カート102の場所および目の前のタスクを完了する各作業者104の識別を追跡し得る。システムは、さらなる分析のために、システム内の関連トランザクション情報(例えば、製品、場所、および作業者)をさらに記憶し得る。
図2Aを依然として参照すると、改良型カート102は、多くの場合、1つ以上の異なる製品を保持するために使用可能な運搬トレイまたは箱の形態における1つまたは多くの類似もしくは異なる保管容器108を搬送するように構成され得る。これらの保管容器108は、改良型カート102から除去可能であり得る。ある場合には、各容器108は、別個のピッキング場所として使用されることができる(すなわち、1つの容器108は、単一注文である)。他の場合には、容器108は、バッチピッキングのために使用されることができる(すなわち、各容器108は、複数の完全または部分的注文を含むことができる)。各容器108は、ピッキング後の仕分けおよび処理のために、1つまたは多くの異なるステーションに割り当てられ得る。一実施形態では、容器108のうちの1つ以上のものは、複数のタイプの製品のバッチピッキング専用であり、別の1つ以上の容器108は、単一製品の複数の数量のピッキング専用である(例えば、1つのアイテムのみを有する注文のため)。この単一ピッキングは、倉庫が、二次仕分けをスキップし、製品を直接梱包ステーションに配達することを可能にする。別の実施形態では、容器108のうちの1つ以上のものは、注文ピッキング(例えば、潜在的に時間に敏感な注文のため)に割り当てられ、容器108のうちの1つ以上のものは、バッチピッキングに割り当てられる(例えば、より低いコストまたはあまり時間に敏感ではない注文のため)。さらに別の実施形態では、容器108のうちの1つ以上のものは、製品を保管場所に補充するために使用されるであろう、製品を搬送する。別のオプションは、改良型カート102が、梱包および出荷ステーション等の異なるステーション間で、必要に応じて、倉庫全体を通して製品を移動させ、および/または出荷することである。さらに別の実装では、容器108のうちの1つ以上のものは、空のままにされ、在庫管理のために倉庫において規則的に行われる循環計数タスクの一部として、容器108の中に入れ、次いで、そこから戻す製品の計数を補助する。タスクは、1つのタスクタイプ専用モードで完了され得るか、または異なるタスクタイプにわたって交互的に扱われ得る。例えば、作業者104は、製品を改良型カート102上の容器「1」の中にピッキングし、次いで、製品を改良型カート102上の容器「2」からつかみ取り、それらを同一製品通路に収納するように指示され得る。
今日の大部分のシステムは、それらのユーザインターフェースのための画面に大きく依拠する。本明細書に説明されるシステムは、画面106を含み、画面106から離れた有意な量のユーザインターフェース/ユーザ体験をさらに特徴とする。例えば、改良型カート102上の照明は、カートの保管容器108の中に入れられる、またはそこから取り出される任意の製品の供給源および/または目的地を点灯するために使用され得る。図2Aは、車のテールライトに類似する、カート102の後方における照明場所110を示し、各保管容器108場所の下方のライト112も示す。この照明は、作業者104が、命令のための画面106を最小限見る必要があるか、または全く見る必要がないように、タスクに基づいて色を変化させ得る。改良型カート102に及ぶ任意の保管容器108は、任意の側から可視であるために、または製品が取り出されるか、もしくは入れられるべき改良型カート102の側に関するインジケータとして、いずれの側も照明し得る照明112を有し得る。照明112は、多くの区画に細かく分割可能であってもよく、光を物理的に変化させずに、1つまたは多くの保管容器108を照明するように構成されることができる。1つのみの容器108が存在する場合、光インジケータ112全体が、点灯し得る。2つ以上の保管ユニット108が存在する場合、照明インジケータ112は、各容器108が個々に示され得るように、2つ以上の区画に分割され得る。LEDストリップ照明または他の好適な照明が、利用され得る。
作業中の作業者104にシステム情報を示すユーザインターフェースのいくつかは、作業者104が倉庫内でそのタスクを完了するためにかかる時間を短縮することに役立つように、画面上に提示され得る。そのようなグラフィカルユーザインターフェース画面は、移動式カート102上に位置し得るか(例えば、図2Aに描写される例示的画面106と同様に)、またはグラフィカルユーザインターフェース画面は、作業者によって所有され得る(例えば、タブレットもしくはスマートフォン等のモバイルコンピュータ上、または手首搭載型画面上)。
倉庫で作業している作業者104は、多くの場合、物理的に困難でかつ精神的に退屈な作業を受け持つ。種々の実施形態では、本明細書に説明されるシステムは、いくつかの方法において、各作業者104から最良生産性を引き出し、彼らを動機付ける。1つの方法は、作業者104をその作業に精神的に従事および集中した状態に保つことである。これは、エラー率を低減させ、生産性を増加させる。ゲーミフィケーション方法を使用して、競争環境を作り出すことは、これらの目標の多くを達成することができる。リアルタイムスコア、日間/週間/月間高スコア、または成績傾向を記録することによって、作業者104は、互いに、および/または自身と競合する。いくつかの倉庫動作では、作業者の報酬の一部は、ある率または他の成績指標に到達もしくは超過したことに基づいて、その個々の成績に結び付けられる。大部分の広く使用されているシステムでは、作業者104は、そのシフトの終了時または週末にのみ、その成績について知る。本明細書に説明されるシステムの実施形態では、作業者の成績は、種々の個人およびチーム目標に到達するように継続して通知される、または動機付けされるように、リアルタイムで示される(例えば、画面106を介して、または頭上ディスプレイ等の別のディスプレイを介して)。
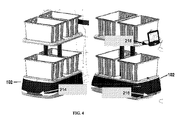
依然として、図4を参照すると、一実施形態では、改良型カート102は、倉庫の方々にナビゲートし、その中で作業者104および製品と相互作用するためにそれが使用するいくつかのセンサ214、216を有する。例えば、改良型カート102は、カート102の正面に位置するセンサ214および/またはカート102の後方に位置するセンサ216を有し得る。レーザ測距、構造化光センサまたは単なるカメラ等のセンサが、倉庫内の改良型カート102の位置を特定し、カートの進路内の可能な障害物を検出するために使用され得る。同時場所特定およびマッピング(SLAM)等の技法が、倉庫のデジタルマップを作成または拡張し、倉庫内のカート102の位置を特定するために使用されることができる。この情報は、それが倉庫内の変化について更新された情報を継続的または周期的に受信するように、倉庫内の複数の改良型カート102間で共有され得る。
改良型カート102は、特に、それらが、自給式である場合、それらの安全性にかかわらず、最初は、倉庫内で作業者104を躊躇させ得る。これは、カート102が移動する方法および時を把握していないので、作業者104の気を散らし、または彼らにカート102と慎重に相互作用させ得る。この躊躇は、生産性に悪影響を及ぼし得る。この懸念に対処するために、カートの移動は、カート102が、移動、停止、および/または方向転換を始めるとき、視覚的フィードバックを作業者104に与えることによって、より明らかにされ得る。加えて、任意の学習曲線を低減させるために、カートは、一実施形態では、大部分の人々が親しみやすいもの、すなわち、自動車を模倣する。1つのそのような実施形態では、改良型カート102は、従来の車と可能な限り同様の見た目かつ同様に活動するように構成される。これは、作業者104を快適にし、作業者が改良型カート102から期待すべきものを理解する、方向指示器、ブレーキライト、ならびに他の視覚的および可聴合図を含む。
異なる作業者104は、異なる技術レベル、速度、身長、および他の特性を有し、それらは、彼らが最良能力を発揮するタスクならびにそれらのタスクを最良に行わせる方法に影響を及ぼす。作業者の技術は、作業者が1つ以上のタスクもしくは他の動作において学習し、より多くの経験を重ねるにつれて、進化し得る。一実施形態では、本明細書に説明されるシステムは、ニューラルネットワーク等の機械学習技法、サポートベクターマシン、およびその他、すなわち、種々の作業者104間のワークフローを通して学習し、どの作業者104にどのタスクが割り当てられるかを最適化する。例えば、システムは、異なるレベルの棚上にある製品にアクセスするためにかかる時間(例えば、作業者の身長に起因する)または製品重量が作業者のピッキング率に影響を及ぼす程度(例えば、作業者の強度に起因する)等の特性を学習し、次いで、タスクをこれらのタスクを最良かつ最も迅速に行うことが可能な作業者104に割り当てることができる。前述のように、システムは、個々の作業者の歩行速度も学習し、改良型カート102の速度を設定し得る。システムによって対処される別の問題は、タスクの正しい混合を作成し、作業者成績を最適化するように、交互配置(すなわち、ピッキングおよび補充のような複数のタスクタイプの混合)の実際のコストを理解することである。
図5は、本発明の一実施形態による、顧客注文を出荷する倉庫を通した製品のフローを描写するブロック図である。図5に描写されるシステムの種々の実施形態では、改良型カート102は、倉庫作業者104と協働し、作業者104のそのタスクを支援し、製品を倉庫の異なるエリア間で移動させる。これらの改良型カート102は、モータによって推進され、製品を倉庫の方々に運送し、人々が、そうでなければ、非自動化された倉庫内で製品を手動で移動させることに費やすであろう、時間量を短縮させ得る。
図5に描写される例示的システムでは、入庫製品が差し向けられ得る3つのオプションが存在する(すなわち、経路A、B、およびC)。種々の実施形態では、改良型カート102は、入庫からの製品を製品が保管されるこれらのエリアの各々に差し向け、および運送する。「アクティブイーチピックエリア」320は、顧客注文のためにピッキングされる準備ができた製品を保管する。「予備バルク保管エリア」322は、調達エリア320内に収まるために大きすぎる製品、または「アクティブイーチピックエリア」320内に保管される製品のための予備数量である製品を保持する。「クロスドック」エリア324を通過する製品は、倉庫内に保管されず、その最終目的地に輸送中である。この製品は、経路Hを介して「梱包」エリア326内の他の製品と融合されるか、または直接経路Iを介して出庫エリア328に発送されるかのいずれかであり得る。
顧客注文が、倉庫に割り当てられると、システムは、アイテムをピッキングための最適リソース(改良型カート102を伴う作業者104、カートを伴わない作業者104、フォークリフト、または他の材料取り扱い車両もしくは装置)を決定し得る。製品は、「アクティブイーチピックエリア」320または「予備バルク保管エリア」322内に保管され得る。製品が、「アクティブイーチピックエリア」320内にある場合、製品は、ピッキングされ、「荷物仕分け」330(経路Dを介して)または「梱包」エリア326(経路Fを介して)のいずれかに運送され得る。「荷物仕分け」330は、製品が個別の顧客注文に融合されるエリアである。この仕分けが発生する必要がない場合、製品は、直接、「梱包」エリア326に移動させられ得る。製品が「予備バルク保管エリア」322内にある場合、経路Eを介して「アクティブイーチピックエリア」320に移動させられるか、または経路Gを介して「梱包」エリア326に発送され得る。アイテムが個別の注文(プロセスJを介して)に仕分けされると、それらは、輸送業者、目的地地域、または配達方法別に追加の仕分けを行う必要があり得る。「出荷仕分け」332が、生じ得(プロセスKを介して)、その後、注文は、出庫エリア328において、顧客への出荷のためのトラックまたは他の車両上に積載される。
図6は、本発明の一実施形態による、ピッキング後の仕分けステーションを図式的に図示する。倉庫作業者104が、改良型カート102の中にピッキング後、カート102は、ピッキング後の仕分けのための複数のステーションに発送され得る。いくつかのステーションでは、仕分けは、作業者104によって行われる。他のステーションでは、ロボットアーム434が、製品アイテム436、438を改良型カート102上の保管エリア108からピッキングし、それらを一意の顧客注文に割り当てられた特定の置場440の中(例えば、仕分け棚442上)に入れる。図6では、菱形436および三角形438は、ロボットアーム434によって仕分け棚442の中に移動させられている異なる製品を表す。顧客注文のための最終アイテムが、棚442の中に入れられた後、作業者104は、通知され、注文は、出荷のために梱包される。これは、図5に描写される「荷物仕分け」プロセス330が自動化されることを可能にする。いくつかの実施形態では、改良型カート102が、このタイプの異なるステーションにおいて複数回停止するか、または、複数の改良型カート102が、これらのステーションにおいて停止し、顧客注文または出荷を完了する。
種々の実施形態では、複数の改良型カート102が同一倉庫内で作業しており、システムが単独よりも良好に作業するようにカート102を協調させるという利点がある。倉庫レイアウトの検出された変化、障害物に関する情報、ならびに作業者104およびカート102または他の追跡された機器の場所等のナビゲーション情報が、改良型カート102間で共有され、それらがより良好にナビゲーション選択を行うことを可能にすることができる。一実施形態では、改良型カート102は、それらが輻輳した倉庫床場所または通路をより効果的にナビゲートすることを可能にする厳密な提案またはルールが与えられる。これは、輻輳エリアをナビゲートするために要求される計算が簡略化されるように、種々の通路および開放エリアに方向性を割り当てることによって行われ得る。
一実施形態では、システムは、容器108のサイズ、容量、および/または場所等の異なる構成を有するカート102に対応する。例えば、システムは、改良型カート102の異なる構成を維持し、製品のタスク属性、作業者、またはタスクタイプ(例えば、計数、ピッキング、補充等)に対応するための正しい構成を割り当て得る。
要求されないが、システムは、概して、改良型カート102がそれ自身の電力下で移動する場合、より良好に能力を発揮する。これは、作業者104によって歩行される時間量を短縮し、カート102を押し引きするときに作業者104が通常行う必要がある作業量を低減させる。以下にさらに議論される図8における表を参照されたい。加えて、カート102は、1人以上の作業者104をその作業のための正しい場所に誘導し、次いで、必要に応じて、タスクの場所の傍で停止、減速、または運転し得る(例えば、低速で)。
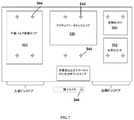
種々の実施形態では、特殊頭上カメラが、使用され、カート102、作業者104、フォークリフト、および他の移動式機器を追跡する。これらの頭上カメラは、追跡される物体上に設置された識別マークを探すことができる。図7は、本発明の一実施形態による、概略倉庫レイアウトおよび頭上カメラ544の場所(図7では、星544として描写される)を示す。識別マークは、物体の自然形状または可視もしくは非可視スペクトルのいずれかにおける特殊パターンであり得る。特殊カメラ544は、次いで、種々の物体を追跡し、その位置を物理的場所に変換することができる。この情報は、一連のカメラ544から収集され得る。いくつかの実施形態では、これらのカメラ544は、天井の近傍に位置する。カメラ544は、互いから独立して画像データを収集し、多くの場合、その対象エリア内で重複することができる。種々のアプローチが、複数のカメラのデータストリームを融合するために採用され得る。第1のアプローチは、画像データの各組を撮影し、それらを一緒に融合し、結果として生じるメタ画像内のパターンを探すことである。第2の方法は(通常、計算上優れている)、各アイテムを単一カメラ544で追跡し、次いで、場所情報を重み付けされた形態で一緒に組み合わせ、最終場所情報を得ることである。アイテムを幾分重複する画像を有していないカメラ544で追跡することも可能であるが、追跡データの品質は、概して、より多く重複がある場合、より優れている。加えて、サブサンプリング技法が、カメラ544の基礎分解能より正確な場所のサブピクセル正確度を得るために使用されることができる。
種々の実施形態では、システムは、随時、倉庫内の改良型カート102の場所を把握し、改良型カート102は、棚通路および倉庫の他のエリアを巡回して作業者104を先導する。改良型カート102は、システムによって決定された速度で移動する。作業者104を先導することによって、改良型カート102は、ワークステーションに隣接する、または保管場所内の特定の場所における誤った方向転換および停止を防止し、作業者104の生産性を増加させることができる。作業者104が、カート102のペースに追い付いていない場合、システムは、適合し、分析および成績監視のために、この情報を記憶することができる。種々の実施形態では、改良型カート102は、オーディオおよび視覚的インジケータを使用して、作業者104がカートの移動を予期し得るように、作業者104のために改良型カート102をより容易に追従させやすくする。
ピッキングプロセスは、7つのステップ、すなわち、置場までの歩行、置場の発見、製品の検索、製品のつかみ取り、製品が正しいことの確認、容器108の中への製品配置、および次のタスクの要求としてモデル化され得る。一般に、システムは、これらのステップのうちの6つの時間を短縮する(製品のつかみ取りを除く全て)。図8では、提案される時間節約が、手動カートピッキングと改良型カートピッキングとの間の典型的バッチピッキングにおける7つのステップの各々に対して見積もられている。
Claims (32)
- 製品が保管されているエリア内の運営生産性を改良するように適合された自動化システムであって、前記システムは、
前記エリア内で製品を運送するための複数のカートと、
コントローラであって、前記複数のカートのうちの第1のカートを第1の人物に関連付けることと、前記エリアの方々に前記第1の人物を先導するように、前記コントローラによって決定された速度で前記第1のカートを制御して自動的に移動させることとを行うように適合されているコントローラと、
複数の頭上カメラであって、前記複数のカートと前記第1の人物と材料取り扱い機器との上に配置されているマークを識別することによって、前記複数のカートと前記第1の人物と前記材料取り扱い機器とを追跡するように適合されている複数の頭上カメラと
を備える、システム。 - 前記コントローラは、前記第1の人物の通常ペースに等しい速度および前記第1の人物の通常ペースより速い速度のうちの少なくとも1つで前記第1のカートを自動的に移動させるようにさらに適合されている、請求項1に記載のシステム。
- 前記コントローラは、前記第1の人物に向けた前記第1のカートの設定を設定することと、前記第1の人物と異なる第2の人物が前記第1のカートに関連付けられると、前記第2の人物に向けた前記第1のカートの設定を設定することとを行うようにさらに適合されている、請求項1に記載のシステム。
- 前記コントローラは、前記第1の人物の能力に基づいて、タスクを前記第1の人物に割り当てるようにさらに適合されている、請求項1に記載のシステム。
- 前記コントローラは、前記第1のカートが前記第1の人物に関連付けられるのと同時に、前記複数のカートのうちの第2のカートを前記第1の人物に関連付けるようにさらに適合されている、請求項1に記載のシステム。
- 前記コントローラは、前記第1のカートが前記第1の人物に関連付けられるのと同時に、前記第1のカートを前記第1の人物と異なる第2の人物に関連付けるようにさらに適合されている、請求項1に記載のシステム。
- 前記第1のカートは、製品を受け取るための少なくとも1つの容器を備えている、請求項1に記載のシステム。
- 前記第1のカートは、前記第1のカートを推進するためのモータを備えている、請求項1に記載のシステム。
- 前記第1のカートは、情報を前記第1の人物に通信するための画面上インターフェースおよび画面外インターフェースのうちの少なくとも1つを備えている、請求項1に記載のシステム。
- 前記画面上インターフェースは、前記エリア内の前記第1のカートの物理的場所、前記エリア内のある製品の物理的場所、前記第1の人物に割り当てられた現在のタスク、種々のタスク間の時間、前記エリアにおける優先順位、前記第1の人物の成績のうちの少なくとも1つに関する情報を通信するように適合されている、請求項9に記載のシステム。
- 前記画面外インターフェースは、照明およびオーディオ源のうちの少なくとも1つを備えている、請求項9に記載のシステム。
- 前記照明は、前記第1のカート上の容器を識別するように適合されており、前記容器内に製品が配置される、または、前記容器から製品が取り出される、請求項11に記載のシステム。
- 前記照明は、前記第1の人物に割り当てられたタスクに応じて異なるように適合されている、請求項11に記載のシステム。
- 前記照明は、前記第1のカートのステータス、前記第1のカートの健全性、前記第1のカートの移動速度、前記第1のカートの方向の変化のうちの少なくとも1つに関する情報を通信するように適合されている、請求項11に記載のシステム。
- 前記オーディオ源は、前記第1の人物に割り当てられたタスクのステータス、前記第1のカートの複数の人物への近接度、前記第1のカートのステータスのうちの少なくとも1つに関する情報を通信するように適合されている、請求項11に記載のシステム。
- 前記第1のカートは、少なくとも部分的に、前記第1のカートからの前記第1の人物の距離を識別すること、前記エリア内の前記第1のカートの位置を決定すること、前記第1のカートの経路内の障害物を識別することのうちの少なくとも1つのためのセンサを備えている、請求項1に記載のシステム。
- 前記製品を処理するための少なくとも1つのワークステーションをさらに備えている、請求項1に記載のシステム。
- 前記ワークステーションは、ロボットアームを備えている、請求項17に記載のシステム。
- 前記ワークステーションは、仕分けステーション、梱包ステーション、出荷ステーション、キット化ステーション、個人化ステーション、ギフト包装ステーションから成る群から選択される、請求項17に記載のシステム。
- 前記第1の人物および他の人物のリアルタイム成績指標を表示するためのディスプレイをさらに備えている、請求項1に記載のシステム。
- 前記複数の頭上カメラは、各カートの場所を決定するようにさらに適合されている、請求項1に記載のシステム。
- 前記エリアは、倉庫を含む、請求項1に記載のシステム。
- 製品が保管されているエリア内の運営生産性を自動化および改良する方法であって、前記方法は、
第1の人物を前記エリア内で製品を運送するための複数のカートのうちの第1のカートに関連付けるステップと、
コントローラを用いて、前記第1のカートを移動させる速度を決定するステップと、
前記エリアの方々に前記第1の人物を先導するように、前記コントローラによって決定された速度で前記第1のカートを制御して自動的に移動させるステップと
を含み、
前記方法は、複数の頭上カメラによって、前記複数のカートと前記第1の人物と材料取り扱い機器との上に配置されているマークを識別することによって、前記複数のカートと前記第1の人物と前記材料取り扱い機器とを追跡するステップをさらに含む、方法。 - 前記制御して自動的に移動させるステップは、前記第1の人物の通常ペースに等しい速度および前記第1の人物の通常ペースより速い速度のうちの少なくとも1つで前記第1のカートを自動的に移動させることを含む、請求項23に記載の方法。
- 前記第1の人物が前記第1のカートに関連付けられるのと同時に、前記第1の人物を前記複数のカートのうちの第2のカートに関連付けることをさらに含む、請求項23に記載の方法。
- 前記第1の人物が前記第1のカートに関連付けられるのと同時に、前記第1の人物と異なる第2の人物を前記第1のカートに関連付けることをさらに含む、請求項23に記載の方法。
- 前記第1の人物の能力に基づいて、タスクを前記第1の人物に割り当てることをさらに含む、請求項23に記載の方法。
- 前記第1のカート上の容器を照明することにより、前記容器を識別することをさらに含み、前記容器内に製品が配置される、または、前記容器から製品が取り出される、請求項23に記載の方法。
- 前記第1の人物に割り当てられたタスクに応じて、前記第1のカート上の容器を異なるように照明することをさらに含む、請求項23に記載の方法。
- オーディオ源によって、前記第1の人物に割り当てられたタスクのステータス、前記第1のカートの複数の人物への近接度、前記第1のカートのステータスのうちの少なくとも1つに関する情報を通信することをさらに含む、請求項23に記載の方法。
- 前記第1の人物および他の人物のリアルタイム成績指標を表示することをさらに含む、請求項23に記載の方法。
- 前記エリアは、倉庫を含む、請求項23に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562263966P | 2015-12-07 | 2015-12-07 | |
| US62/263,966 | 2015-12-07 | ||
| PCT/US2016/065329 WO2017100287A1 (en) | 2015-12-07 | 2016-12-07 | Warehouse automation systems and methods using a motor-driven cart |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019502617A JP2019502617A (ja) | 2019-01-31 |
| JP2019502617A5 JP2019502617A5 (ja) | 2020-01-23 |
| JP6954907B2 true JP6954907B2 (ja) | 2021-10-27 |
Family
ID=57614477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018529121A Active JP6954907B2 (ja) | 2015-12-07 | 2016-12-07 | モータ駆動カートを用いた倉庫自動化システムおよび方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (7) | US9834380B2 (ja) |
| EP (1) | EP3387596A1 (ja) |
| JP (1) | JP6954907B2 (ja) |
| KR (1) | KR102452858B1 (ja) |
| CN (1) | CN108475364A (ja) |
| CA (1) | CA3007028C (ja) |
| WO (1) | WO2017100287A1 (ja) |
Families Citing this family (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017100287A1 (en) | 2015-12-07 | 2017-06-15 | 6 River Systems, Inc. | Warehouse automation systems and methods using a motor-driven cart |
| US10346793B2 (en) * | 2016-01-29 | 2019-07-09 | Walmart Apollo, Llc | Systems and methods for order filling |
| US11000953B2 (en) * | 2016-08-17 | 2021-05-11 | Locus Robotics Corp. | Robot gamification for improvement of operator performance |
| WO2018039337A1 (en) * | 2016-08-23 | 2018-03-01 | Canvas Technology, Inc. | Autonomous cart for manufacturing and warehouse applications |
| US10384872B2 (en) * | 2016-08-30 | 2019-08-20 | Intelligrated Headquarters, Llc | Robotic put wall |
| CN108357886A (zh) | 2017-01-26 | 2018-08-03 | 菜鸟智能物流控股有限公司 | 物品拣选方法及相关设备 |
| US11270371B2 (en) * | 2017-03-10 | 2022-03-08 | Walmart Apollo, Llc | System and method for order packing |
| JP6633815B2 (ja) | 2017-07-03 | 2020-01-22 | 北京極智嘉科技有限公司 | 中継式物品仕分けシステムおよび仕分け方法 |
| WO2019195082A1 (en) | 2018-04-04 | 2019-10-10 | Walmart Apollo, Llc | Smart item storage cart system |
| WO2019195076A1 (en) | 2018-04-04 | 2019-10-10 | Walmart Apollo, Llc | Cold-chain compliant item storage cart system |
| WO2019200018A1 (en) * | 2018-04-10 | 2019-10-17 | Dymesich David Tanner | Robot management system |
| US11074547B2 (en) * | 2018-04-20 | 2021-07-27 | Walmart Apollo, Llc | Systems and methods for dual optimization of pick walk and tote fill rates for order picking |
| CN108500949A (zh) * | 2018-06-06 | 2018-09-07 | 北京极智嘉科技有限公司 | 具有多个承接装置的移动机器人 |
| US11097897B1 (en) * | 2018-07-13 | 2021-08-24 | Vecna Robotics, Inc. | System and method of providing delivery of items from one container to another container via robot movement control to indicate recipient container |
| CN109241215B (zh) * | 2018-07-27 | 2021-01-22 | 拉扎斯网络科技(上海)有限公司 | 对象搜索方法、装置、设备及计算机可读存储介质 |
| CN110371635A (zh) * | 2018-08-02 | 2019-10-25 | 北京京东尚科信息技术有限公司 | 自动导引运输车 |
| JP7183643B2 (ja) * | 2018-09-07 | 2022-12-06 | 株式会社リコー | 管理装置、ピッキングシステムおよびピッキング管理方法 |
| US11214967B1 (en) | 2018-11-08 | 2022-01-04 | Scepaniak IP Holdings, LLC | Roof rock spreader |
| CN109359924A (zh) * | 2018-11-19 | 2019-02-19 | 炬星科技(深圳)有限公司 | 基于机器人的物流分区拣选方法、装置、终端、系统及存储介质 |
| CN109544068A (zh) * | 2018-11-19 | 2019-03-29 | 炬星科技(深圳)有限公司 | 基于机器人的仓储订单拣选方法 |
| US11480953B2 (en) * | 2019-01-23 | 2022-10-25 | Lingdong Technology (Beijing) Co. Ltd | Autonomous broadcasting system for self-driving vehicle |
| CN109886625A (zh) * | 2019-01-30 | 2019-06-14 | 炬星科技(深圳)有限公司 | 拣货方法、装置及存储介质 |
| EP3696744A1 (en) * | 2019-02-13 | 2020-08-19 | Robert Bosch GmbH | Safeguarding resources of physical entites in a shared environment |
| US11276026B2 (en) * | 2019-02-14 | 2022-03-15 | 6 River Systems, Inc. | Methods and apparatus for using a moveable sort wall to facilitate assembly of product orders |
| US11560153B2 (en) | 2019-03-07 | 2023-01-24 | 6 River Systems, Llc | Systems and methods for collision avoidance by autonomous vehicles |
| AU2020202306A1 (en) | 2019-04-02 | 2020-10-22 | The Raymond Corporation | Systems and methods for an arbitration controller to arbitrate multiple automation requests on a material handling device |
| USD892188S1 (en) | 2019-04-05 | 2020-08-04 | IAM Robotics, LLC | Autonomous mobile robot |
| JP7243401B2 (ja) | 2019-04-08 | 2023-03-22 | 株式会社リコー | 管理装置、ピッキングシステムおよび管理方法 |
| US11351804B2 (en) | 2019-06-13 | 2022-06-07 | Illinois Tool Works Inc. | Multi-functional print head for a stencil printer |
| US11318549B2 (en) | 2019-06-13 | 2022-05-03 | Illinois Tool Works Inc. | Solder paste bead recovery system and method |
| US11247286B2 (en) | 2019-06-13 | 2022-02-15 | Illinois Tool Works Inc. | Paste dispensing transfer system and method for a stencil printer |
| US11592815B2 (en) | 2019-06-24 | 2023-02-28 | Mul Technologies, Llc | Autonomous utility cart and robotic cart platform |
| TWI714136B (zh) * | 2019-06-24 | 2020-12-21 | 英業達股份有限公司 | 適用於倉儲系統的導航系統與物料輸送載具的導航方法 |
| CN111661550B (zh) * | 2019-06-24 | 2021-04-16 | 灵动科技(北京)有限公司 | 自动运输装置 |
| CN110245539A (zh) * | 2019-07-09 | 2019-09-17 | 江苏安方电力科技有限公司 | 一种电力物资自动扫码系统 |
| US10861118B1 (en) * | 2019-09-23 | 2020-12-08 | Coupang Corp. | Systems and methods for automatic assignment of flexible delivery work |
| US10846812B1 (en) * | 2019-09-25 | 2020-11-24 | Coupang Corp. | Computer-implemented systems and methods for centralized logistics monitoring |
| US11488235B2 (en) * | 2019-10-07 | 2022-11-01 | Oculogx Inc. | Systems, methods, and devices for utilizing wearable technology to facilitate fulfilling customer orders |
| US11219165B1 (en) * | 2019-10-09 | 2022-01-11 | Vinergy, Inc. | Motorized cart for transporting agricultural harvest containers |
| JP7370809B2 (ja) | 2019-10-30 | 2023-10-30 | シャープ株式会社 | ピッキング作業支援装置およびピッキング作業支援プログラム |
| US20210150474A1 (en) * | 2019-11-19 | 2021-05-20 | Coupang Corp. | Computer implemented systems and methods for efficient distribution of orders based on system parameters |
| US20210325856A1 (en) * | 2020-04-17 | 2021-10-21 | Dematic Gmbh | Method for maintaining systems, in particular machines in warehouses |
| EP4201857A4 (en) * | 2020-08-24 | 2023-10-18 | Fuji Corporation | CONTROL DEVICE, DISPENSING SYSTEM, CONTROL METHOD AND DISPLAY PANEL |
| US11479414B2 (en) | 2020-09-11 | 2022-10-25 | Locus Robotics Corp. | Dynamic item putaway management using mobile robots |
| US11724883B2 (en) | 2020-09-11 | 2023-08-15 | Locus Robotics Corp. | Presort system for executing robot-assisted putaway tasks |
| CN112061657B (zh) * | 2020-09-11 | 2022-12-02 | 灵动科技(北京)有限公司 | 用于引导机器人在仓库中运输货物的方法和装置 |
| US11551183B2 (en) | 2020-09-21 | 2023-01-10 | 6 River Systems, Llc | Systems and methods for managing exceptions to orders collected by autonomous vehicles |
| US11906980B2 (en) | 2020-11-19 | 2024-02-20 | 6 River Systems, Llc | Systems and methods for autonomous vehicle operation |
| US11820599B2 (en) | 2020-12-08 | 2023-11-21 | Caterpillar Inc. | System and method of automatically picking and handling parts |
| US20220194428A1 (en) | 2020-12-17 | 2022-06-23 | 6 River Systems, Llc | Systems and methods for calibrating sensors of autonomous vehicles |
| FR3120064B1 (fr) * | 2021-02-25 | 2023-11-17 | Balea | Chariot de manutention à moyen de guidage de son conducteur |
| US11934198B2 (en) | 2021-03-11 | 2024-03-19 | 6 River Systems, Llc | Systems and methods for autonomous vehicle operation |
| CN115196261A (zh) * | 2021-04-12 | 2022-10-18 | 泰科电子(上海)有限公司 | 周转箱自动搬运系统 |
| CN113159691A (zh) * | 2021-05-10 | 2021-07-23 | 北京京东乾石科技有限公司 | 物品入库方法、物品出库方法和装置 |
| WO2022254463A1 (en) * | 2021-06-02 | 2022-12-08 | Waycool Foods And Products Private Limited | Cloud-based automation system for obtaining, tracking and delivering food items |
| CN113401552B (zh) * | 2021-06-11 | 2023-04-21 | 炬星科技(深圳)有限公司 | 一种机器人辅助拣货方法、机器人及计算机可读存储介质 |
| US11676101B2 (en) | 2021-06-16 | 2023-06-13 | 6 River Systems, Llc | Systems and methods for using kits as a source of inventory in a fulfillment center |
| US20220405669A1 (en) * | 2021-06-16 | 2022-12-22 | 6 River Systems, Llc | Systems And Methods For Optimizing Kit Assembly In A Fulfillment Center |
| US11681983B2 (en) | 2021-07-23 | 2023-06-20 | 6 River Systems, Llc | Systems and methods for prioritizing pick jobs while optimizing efficiency |
| EP4125015A1 (en) * | 2021-07-28 | 2023-02-01 | Dataconsult Spolka Akcyjna | Management system for goods picking and packing |
| US11774977B1 (en) | 2022-04-04 | 2023-10-03 | 6 River Systems, Llc | Systems, apparatus, and methods for optimization of autonomous vehicle workloads |
Family Cites Families (99)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3312300A (en) | 1964-11-02 | 1967-04-04 | William D Jones | Power-operated utility cart |
| US3746189A (en) * | 1966-04-18 | 1973-07-17 | Clark Equipment Co | Automatic control system for storage systems transfer cart |
| US4088237A (en) | 1976-09-27 | 1978-05-09 | Si Handling Systems, Inc. | Storage and retrieval system |
| US4861553A (en) * | 1987-06-11 | 1989-08-29 | Technicon Instruments Corporation | Automatic sampling system |
| US5163001A (en) | 1989-02-17 | 1992-11-10 | Luke Jr Walter | Interactive display for use on an automatic guided vehicle |
| US5023790A (en) | 1989-02-17 | 1991-06-11 | Whs Robotics | Automatic guided vehicle system |
| WO1991017936A1 (fr) | 1990-05-17 | 1991-11-28 | Daifuku Co., Ltd. | Entrepot automatise et fichier de travail |
| US5250789A (en) | 1991-10-31 | 1993-10-05 | Johnsen Edward L | Shopping cart |
| JPH05270611A (ja) | 1992-03-25 | 1993-10-19 | Toyota Motor Corp | 自動倉庫の入出庫制御装置 |
| US5877962A (en) * | 1993-10-25 | 1999-03-02 | Radcliffe; Frederick W. | Cart |
| JPH0891242A (ja) | 1994-07-29 | 1996-04-09 | Shinko Electric Co Ltd | 電動式運搬車 |
| US5953234A (en) | 1996-03-12 | 1999-09-14 | Woodson Incorporated | Automated storage facility including a storage and retrieval system and a floor inventory management system |
| US6206170B1 (en) | 1996-04-15 | 2001-03-27 | Mantissa Corporation | Control system for a tilt tray sorter |
| WO1997045314A1 (en) | 1996-05-28 | 1997-12-04 | Rhino Craft, Inc. | Cart pulling system |
| CA2255618A1 (en) | 1997-03-25 | 1998-10-01 | Luigi Fiordelisi | Computerized shopping cart with storage and distribution system, for supermarket use |
| DE19902601A1 (de) * | 1999-01-23 | 2000-07-27 | Roche Diagnostics Gmbh | Verfahren und Vorrichtung zum Entnehmen analytischer Verbrauchsmittel aus einem Vorratsbehältnis |
| WO2001041032A1 (en) | 1999-11-30 | 2001-06-07 | David Russell | Methods, systems, and apparatuses for secure interactions |
| US6652213B1 (en) | 2000-09-08 | 2003-11-25 | California Natural Products | Automated warehousing system and method |
| US20050149226A1 (en) | 2002-04-09 | 2005-07-07 | Ebox, Inc. | Warehousing system and method |
| JP2002338015A (ja) * | 2001-05-15 | 2002-11-27 | Ishida Co Ltd | 商品仕分けシステム |
| US6701234B1 (en) | 2001-10-18 | 2004-03-02 | Andrew John Vogelsang | Portable motion recording device for motor vehicles |
| CN1422793A (zh) * | 2001-12-05 | 2003-06-11 | 黄卫华 | 集装箱自动存取装置 |
| WO2003054584A1 (de) | 2001-12-21 | 2003-07-03 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und verfahren zum erfassen der anwesenheit eines einkaufswagens an einem ort |
| US6775588B1 (en) | 2003-01-30 | 2004-08-10 | Foxfire Technologies, Inc. | Distributed intelligence, wireless, light-directed pick/put system |
| US7603291B2 (en) | 2003-03-14 | 2009-10-13 | Sap Aktiengesellschaft | Multi-modal sales applications |
| US7159777B2 (en) | 2003-04-07 | 2007-01-09 | Silverbrook Research Pty Ltd | Transparent conveyor for check-out scanning |
| JP2005050273A (ja) * | 2003-07-31 | 2005-02-24 | Denso Corp | 車載機器操作支援システム |
| US7865398B2 (en) | 2003-09-30 | 2011-01-04 | Microsoft Corporation | Radio frequency identification tag on picking container and display of picklist to order filler |
| US7073634B2 (en) | 2003-11-28 | 2006-07-11 | California Natural Products | Automated warehouse row cart and lift |
| US20050177446A1 (en) * | 2004-02-11 | 2005-08-11 | International Business Machines Corporation | Method and system for supporting coordination and collaboration of multiple shoppers |
| US7401796B1 (en) | 2004-06-16 | 2008-07-22 | Greco David F | Computer rack cart |
| GB2416612A (en) | 2004-07-22 | 2006-02-01 | Lorna Louise Langdon | On-cart recycling data collection system |
| US20060163350A1 (en) | 2005-01-11 | 2006-07-27 | Melton Michael N | Managing RFID tags using an RFID-enabled cart |
| US8731708B2 (en) * | 2005-03-10 | 2014-05-20 | Amazon Technologies, Inc. | Method and apparatus for multi-destination item selection using motes |
| US7774243B1 (en) * | 2005-03-11 | 2010-08-10 | Amazon Technologies, Inc. | Method and system for predestination item transfer among agents within a materials handling facility |
| CA2601572A1 (en) | 2005-03-18 | 2006-09-28 | Gatekeeper Systems, Inc. | Power generation systems and methods for wheeled objects |
| JP2006264461A (ja) * | 2005-03-23 | 2006-10-05 | Victor Co Of Japan Ltd | ショッピングカート |
| EP1886288B1 (en) | 2005-05-13 | 2014-01-08 | EMS Technologies, Inc. | Pallet jack antenna for rfid system |
| US20070005377A1 (en) * | 2005-06-22 | 2007-01-04 | Muskoka, L.L.C. | Grocery depot warehouse |
| US20070013157A1 (en) | 2005-07-18 | 2007-01-18 | Wiff James W | Dual hitch assembly |
| DE202005013177U1 (de) | 2005-08-20 | 2005-12-22 | Valentin, Michael | Elektromotorisch betriebener Golfkarren |
| CA2620062C (en) | 2005-08-25 | 2015-10-27 | Gatekeeper Systems, Inc. | Systems and methods for locating and controlling powered vehicles |
| US8639543B2 (en) | 2005-11-01 | 2014-01-28 | International Business Machines Corporation | Methods, systems, and media to improve employee productivity using radio frequency identification |
| US7504949B1 (en) * | 2006-05-24 | 2009-03-17 | Amazon Technologies, Inc. | Method and apparatus for indirect asset tracking with RFID |
| US9645968B2 (en) | 2006-09-14 | 2017-05-09 | Crown Equipment Corporation | Multiple zone sensing for materials handling vehicles |
| MX2009007465A (es) | 2007-01-12 | 2009-10-08 | Opex Corp | Metodo y aparato para clasificar articulos. |
| DE102007005561B4 (de) * | 2007-01-24 | 2009-11-26 | SSI Schäfer Noell GmbH Lager- und Systemtechnik | Kommissioniersystem mit Regaltransporteinheit und Verfahren zum Betreiben eines solchen Systems |
| US20080210268A1 (en) | 2007-02-14 | 2008-09-04 | Metheny James R | Shopping Cart Washer and Sanitizer |
| US20090012760A1 (en) | 2007-04-30 | 2009-01-08 | Schunemann Alan J | Method and system for activity monitoring and forecasting |
| US7945455B2 (en) | 2008-01-30 | 2011-05-17 | Cardinal Health Technologies, Llc | Pharmaceutical distribution systems and methods |
| JP5380913B2 (ja) * | 2008-06-11 | 2014-01-08 | 株式会社寺岡精工 | ピッキングシステム、ピッキングシステムの管理装置 |
| JP2010064823A (ja) | 2008-09-09 | 2010-03-25 | Jisso Kk | ピッキングカート及びカートピッキングシステム |
| US9417253B2 (en) * | 2008-10-30 | 2016-08-16 | Sysmex Corporation | Specimen processing system and specimen container classifying apparatus |
| CN101763075A (zh) * | 2008-11-28 | 2010-06-30 | 上海网环信息科技有限公司 | 仓库中不同仓位间物料转移的控制方法 |
| JP5381106B2 (ja) * | 2009-01-07 | 2014-01-08 | コベルコクレーン株式会社 | クレーンの運転評価装置 |
| US8371404B2 (en) | 2009-07-01 | 2013-02-12 | Darron Boeckler | Self-propelled pool service cart with sulky |
| US8201737B1 (en) * | 2009-07-21 | 2012-06-19 | Amazon Technologies, Inc. | Validating item placement |
| US20110035247A1 (en) | 2009-08-04 | 2011-02-10 | United Parcel Service Of America | Systems, methods, apparatuses, and computer program products for determining productivity associated with retrieving items in a warehouse |
| US8234006B1 (en) * | 2009-09-28 | 2012-07-31 | Amazon Technologies, Inc. | Sort bin assignment |
| US8244603B1 (en) * | 2010-02-15 | 2012-08-14 | Amazon Technologies, Inc. | System and method for integrated stowing and picking in a materials handling facility |
| US20110266078A1 (en) | 2010-04-30 | 2011-11-03 | Caterpillar Inc. | Order picking cart for stock chaser vehicle |
| US20110320322A1 (en) | 2010-06-25 | 2011-12-29 | Symbol Technologies, Inc. | Inventory monitoring using complementary modes for item identification |
| US8839132B2 (en) | 2010-12-02 | 2014-09-16 | Tecsys, Inc. | Method and system for providing visual instructions to warehouse operators |
| US8798784B1 (en) * | 2010-12-29 | 2014-08-05 | Amazon Technologies, Inc. | Robotic induction in materials handling facilities with batch singulation |
| MX357760B (es) | 2011-02-25 | 2018-07-24 | Vnomics Corp | Sistema y método para entrenamiento de un operador a bordo del vehículo. |
| CN103596858A (zh) | 2011-05-27 | 2014-02-19 | 村田机械株式会社 | 拣选以及分拣系统 |
| US8892241B2 (en) * | 2011-06-24 | 2014-11-18 | Seegrid Corporation | Robot-enabled case picking |
| US8803730B2 (en) * | 2011-07-21 | 2014-08-12 | The Boeing Company | Radar pulse detection using a digital radar receiver |
| US9317037B2 (en) | 2011-10-03 | 2016-04-19 | Vocollect, Inc. | Warehouse vehicle navigation system and method |
| US9656804B2 (en) * | 2011-12-20 | 2017-05-23 | Hoj Engineering & Sales Co., Inc. | Warehouse management system |
| US9754238B2 (en) * | 2011-12-20 | 2017-09-05 | Hoj Engineering & Sales Co., Inc. | Warehouse management system |
| WO2013102212A1 (en) | 2011-12-30 | 2013-07-04 | Seegrid Corporation | Auto-navigating vehicle with field-of-view enhancing sensor positioning and method of accomplishing same |
| USD683333S1 (en) | 2012-01-10 | 2013-05-28 | Monster, Llc | Headphone |
| US10229383B2 (en) * | 2012-02-05 | 2019-03-12 | Matthews International Corporation | Perpetual batch order fulfillment |
| BE1020545A3 (nl) | 2012-02-28 | 2013-12-03 | B & A Automation Bvba | Buisrailwagen. |
| US20130333961A1 (en) | 2012-04-24 | 2013-12-19 | Thomas O'Donnell | Motorized shopping cart |
| CA3155221A1 (en) * | 2012-05-28 | 2013-11-28 | Tulip.Io Inc. | Order processing systems using picking robots |
| JP5334145B1 (ja) | 2012-06-29 | 2013-11-06 | トーヨーカネツソリューションズ株式会社 | 物品のピッキング作業の支援システム |
| USD683101S1 (en) | 2012-07-05 | 2013-05-21 | Kelly Ann Wojdyla-Gray | Video cart |
| EP2915715B1 (en) | 2012-10-31 | 2017-05-17 | Yamaha Hatsudoki Kabushiki Kaisha | Vehicle speed control device and vehicle provided therewith |
| US9020632B2 (en) | 2013-03-15 | 2015-04-28 | Intelligrated Headquarters, Llc | Storage, retrieval and sortation system |
| CA2918238A1 (en) | 2013-08-07 | 2015-02-12 | Matthews Resources, Inc. | Perpetual batch order fulfillment |
| US9463927B1 (en) * | 2013-09-23 | 2016-10-11 | Vecna Technologies, Inc. | Transporting and/or sorting items with mobile robot(s) |
| BR112016017128B8 (pt) | 2014-01-24 | 2023-10-10 | Picklog Lda | Unidade móvel evolutiva para armazenamento e dispensação controlada de produtos |
| US20150223891A1 (en) * | 2014-02-07 | 2015-08-13 | Enovate Medical Llc | Medical cart access control |
| EP3105105B1 (en) | 2014-02-12 | 2019-04-10 | TECNEVA S.r.l. | Control system of a self-moving cart, in particular a golf caddie |
| US9333979B2 (en) * | 2014-02-13 | 2016-05-10 | Avi Iron Solutions Ltd. | Auxiliary pusher device |
| CA2943454C (en) * | 2014-04-04 | 2022-08-23 | Superpedestrian, Inc. | Systems, methods and devices for the operation of electrically motorized vehicles |
| US10127514B2 (en) * | 2014-04-11 | 2018-11-13 | Intelligrated Headquarters Llc | Dynamic cubby logic |
| US9971985B2 (en) * | 2014-06-20 | 2018-05-15 | Raj Abhyanker | Train based community |
| CN104386406B (zh) * | 2014-10-27 | 2017-06-16 | 深圳市鲸仓科技有限公司 | 自动仓库控制系统及方法 |
| CN104599102B (zh) * | 2015-01-04 | 2018-06-26 | 临沂市义兰物流信息科技有限公司 | 一种冷链物流仓储监管系统及方法 |
| US20160260049A1 (en) * | 2015-03-06 | 2016-09-08 | Wal-Mart Stores, Inc. | Shopping facility assistance systems, devices, and methods to dispatch and recover motorized transport units that effect remote deliveries |
| CN204641815U (zh) * | 2015-05-21 | 2015-09-16 | 苏州得尔达国际物流有限公司 | 仓储物流用的智能手推车 |
| US20160364785A1 (en) * | 2015-06-09 | 2016-12-15 | International Business Machines Corporation | Automated in store shopping system |
| WO2017100287A1 (en) | 2015-12-07 | 2017-06-15 | 6 River Systems, Inc. | Warehouse automation systems and methods using a motor-driven cart |
| USD812836S1 (en) | 2016-07-22 | 2018-03-13 | Meso Scale Technologies, Llc. | Cart |
| TWD186020S (zh) | 2016-09-19 | 2017-10-11 | 北京欣奕華科技有限公司 | 服務機器人 |
| USD810167S1 (en) | 2017-01-05 | 2018-02-13 | Kinpo Electronics, Inc. | Service robot |
-
2016
- 2016-12-07 WO PCT/US2016/065329 patent/WO2017100287A1/en active Application Filing
- 2016-12-07 CA CA3007028A patent/CA3007028C/en active Active
- 2016-12-07 CN CN201680071518.1A patent/CN108475364A/zh active Pending
- 2016-12-07 EP EP16819244.1A patent/EP3387596A1/en not_active Ceased
- 2016-12-07 JP JP2018529121A patent/JP6954907B2/ja active Active
- 2016-12-07 US US15/371,590 patent/US9834380B2/en active Active
- 2016-12-07 KR KR1020187019158A patent/KR102452858B1/ko active IP Right Grant
-
2017
- 2017-11-14 US US15/812,287 patent/US10053289B2/en active Active
-
2018
- 2018-07-12 US US16/034,125 patent/US10239694B2/en active Active
- 2018-11-14 US US16/190,570 patent/US10294028B2/en active Active
-
2019
- 2019-04-08 US US16/377,740 patent/US10807800B2/en active Active
-
2020
- 2020-09-16 US US17/022,642 patent/US11685602B2/en active Active
-
2023
- 2023-05-03 US US18/311,664 patent/US20230271784A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20180065809A1 (en) | 2018-03-08 |
| EP3387596A1 (en) | 2018-10-17 |
| US10239694B2 (en) | 2019-03-26 |
| KR20180091042A (ko) | 2018-08-14 |
| JP2019502617A (ja) | 2019-01-31 |
| US20170158431A1 (en) | 2017-06-08 |
| CA3007028A1 (en) | 2017-06-15 |
| WO2017100287A1 (en) | 2017-06-15 |
| US10807800B2 (en) | 2020-10-20 |
| US20230271784A1 (en) | 2023-08-31 |
| US20190256290A1 (en) | 2019-08-22 |
| US20200407164A1 (en) | 2020-12-31 |
| US11685602B2 (en) | 2023-06-27 |
| CA3007028C (en) | 2022-03-22 |
| US20190077601A1 (en) | 2019-03-14 |
| US10294028B2 (en) | 2019-05-21 |
| US9834380B2 (en) | 2017-12-05 |
| KR102452858B1 (ko) | 2022-10-07 |
| US20180319593A1 (en) | 2018-11-08 |
| US10053289B2 (en) | 2018-08-21 |
| CN108475364A (zh) | 2018-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6954907B2 (ja) | モータ駆動カートを用いた倉庫自動化システムおよび方法 | |
| US10087000B2 (en) | Pallet-conveyor system | |
| US11693403B2 (en) | Dynamic allocation and coordination of auto-navigating vehicles and selectors | |
| JP6220406B2 (ja) | ピッキングシステム | |
| JP2022533784A (ja) | 倉庫保管タスク処理方法と装置、倉庫保管システム、およびストレージ媒体 | |
| EP2724202B1 (en) | Robot-enabled case picking | |
| CA2816752C (en) | Order processing systems using picking robots | |
| CN109154799A (zh) | 基于可定制目标的仓库布局优化 | |
| JP2020509981A (ja) | ロボットに対応したケースピッキング | |
| KR20190048674A (ko) | 지능형 무인자율주행 물류 로봇 | |
| US20220033186A1 (en) | System-Directed Single Line Pick Batching | |
| Torchio | Survey on automated systems for smart warehouses | |
| JP7403487B2 (ja) | ピッキングシステム | |
| Dabic-Miletic | Benefits and challenges of implementing autonomous technology for sustainable material handling in industrial processes | |
| US10692041B1 (en) | Inventory holder markers for selective glowing based on received wavelengths |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191203 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210922 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6954907 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |