JP6944672B2 - 電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム - Google Patents
電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム Download PDFInfo
- Publication number
- JP6944672B2 JP6944672B2 JP2016247023A JP2016247023A JP6944672B2 JP 6944672 B2 JP6944672 B2 JP 6944672B2 JP 2016247023 A JP2016247023 A JP 2016247023A JP 2016247023 A JP2016247023 A JP 2016247023A JP 6944672 B2 JP6944672 B2 JP 6944672B2
- Authority
- JP
- Japan
- Prior art keywords
- electromagnetic field
- resistor
- voltage
- electromagnetic
- field sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Description
[電磁界計測システムの構成]
はじめに、電磁界センサ部10を有する電磁界計測システム1の構成について、図1を用いて説明する。図1は、本実施の形態にかかる電磁界計測システム1の概略構成図である。
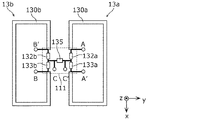
ここで、電磁界センサ11、12および13の構成の詳細について、図2を用いて説明する。図2は、本実施の形態にかかる電磁界センサ11、12および13の概略構成図である。なお、電磁界センサ11、12および13の構成は同一であるため、以下では電磁界センサ13を例として説明する。
次に、電磁界計測システム1による電磁界計測の原理について図3を用いて説明する。図3は、本実施の形態にかかる電磁界センサ11、12および13における電界および磁界の計測位置を示す図であり、(a)は電磁界センサ13における電界および磁界の計測位置を示す図、(b)は(a)に示した電磁界センサ13における座標軸と電磁界センサ13における電界および磁界の方向を示す図である。
以上、本実施の形態にかかる電磁界センサおよび電磁界計測システムによると、同一の位置での電界および磁界を検出することができるので、ポインティングベクトルを計測することができる。したがって、電磁界センサが配置された位置における電界および磁界を計測することができる。さらに、信号処理部20により、電磁界センサが配置された位置における電界および磁界を計測した結果から、不要電磁波の伝搬経路および電磁波源を推定してもよい。
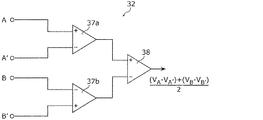
次に、実施の形態2にかかる電磁界計測システム2について、図4〜図6を用いて説明する。図4は、本実施の形態にかかる電磁界計測システム2の概略構成図である。図5は、本実施の形態にかかる電磁界計測システム2における第1のアンプ31の概略構成図である。図6は、本実施の形態にかかる電磁界計測システム2における第2のアンプ32の概略構成図である。
以上、本発明にかかる電磁界センサおよび電磁界計測システムについて、実施の形態に基づいて説明したが、本発明は実施の形態に限定されるものではない。実施の形態に対して当業者が思いつく変形を施して得られる形態、および、複数の実施の形態における構成要素を任意に組み合わせて実現される別の形態も本発明に含まれる。
10 電磁界センサ部
11、12、13 電磁界センサ
11a、11b、12a、12b、13a、13b 導体ループ
20 信号処理部
30 配線
31 第1のアンプ
32 第2のアンプ
34a、34b、36、37a、37b、38 増幅器
35a、35b 抵抗
111 回路ボックス
130a、130b 導線
132a、132b 抵抗(第2の抵抗、第3の抵抗)
133a、133b 抵抗(第2の抵抗、第4の抵抗)
135 抵抗(第1の抵抗)
Claims (9)
- 単一平面内に配置された一対の導体ループを備え、
前記一対の導体ループは、互いに第1の抵抗により接続されており、
前記第1の抵抗の両端の電圧である第1の電圧を検出することにより電界を計測する
電磁界センサ。 - 前記一対の導体ループの各導体ループは、同一の形状を有しており、対称に配置されている
請求項1に記載の電磁界センサ。 - 単一平面内に配置された一対の導体ループを備え、
前記一対の導体ループの各導体ループは、当該導体ループの一部として第2の抵抗を有し、
前記第2の抵抗の両端の電圧である第2の電圧を検出することにより磁界を計測し、
前記一対の導体ループの各導体ループは、第1の抵抗により接続されており、
前記第2の抵抗は、抵抗値が等しく直列に接続された第3の抵抗および第4の抵抗とで構成され、
前記第3の抵抗と第4の抵抗との間に、前記第1の抵抗が接続されており、
前記第1の抵抗の両端の電圧である第1の電圧を検出することにより電界を計測し、
前記第1の抵抗が接続された前記第3の抵抗の一端と反対側の前記第3の抵抗の他端と、前記第1の抵抗が接続された前記第4の抵抗の一端と反対側の前記第4の抵抗の他端との間の電圧である前記第2の電圧を検出することにより磁界を計測する
電磁界センサ。 - 前記第1の電圧を増幅して出力する第1のアンプを有する
請求項1または3に記載の電磁界センサ。 - 前記一対の導体ループの各導体ループにおいて検出された前記第2の電圧を増幅し、かつ、増幅された前記第2の電圧の平均値を出力する第2のアンプを有する
請求項3に記載の電磁界センサ。 - 前記電磁界センサを3組有し、
前記3組の電磁界センサがそれぞれ配置された前記単一平面は互いに直交し、かつ、前記3組の電磁界センサは、前記3組の電磁界センサそれぞれの中心で交叉している
請求項1〜5のいずれか1項に記載の電磁界センサ。 - 請求項3に記載の電磁界センサと、
前記電磁界センサにおいて検出された前記電界および前記磁界からポインティングベクトルを計算する信号処理部とを備える
電磁界計測システム。 - 請求項3に記載の電磁界センサと、
前記電磁界センサにおいて検出された前記電界および前記磁界の少なくとも一部からポインティングベクトルを計算する信号処理部とを備え、
前記信号処理部は、計算した前記ポインティングベクトルから電磁波の到来方向を推定する
電磁波の到来方向推定システム。 - 請求項3に記載の電磁界センサと、
前記電磁界センサにおいて検出された前記電界の向きおよび前記磁界の向きからポインティングベクトルを計算する信号処理部とを備え、
前記信号処理部は、計算した前記ポインティングベクトルから電磁波の到来方向を推定する
電磁波の到来方向推定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016247023A JP6944672B2 (ja) | 2016-12-20 | 2016-12-20 | 電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016247023A JP6944672B2 (ja) | 2016-12-20 | 2016-12-20 | 電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018100904A JP2018100904A (ja) | 2018-06-28 |
| JP6944672B2 true JP6944672B2 (ja) | 2021-10-06 |
Family
ID=62715259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016247023A Active JP6944672B2 (ja) | 2016-12-20 | 2016-12-20 | 電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6944672B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7410561B2 (ja) | 2020-02-28 | 2024-01-10 | 国立大学法人金沢大学 | 電波センサ、および電界成分検出装置 |
| WO2022196573A1 (ja) * | 2021-03-15 | 2022-09-22 | パナソニックIpマネジメント株式会社 | 測定装置及び測定方法 |
| WO2023166228A1 (en) * | 2022-03-04 | 2023-09-07 | eV-Technologies | Device and method for simultaneous detection of incident electric and magnetic fields, as well as energy crossing a given surface |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0501169B1 (de) * | 1991-02-25 | 1995-08-23 | Asea Brown Boveri Ag | Feldstärkenmessgerät |
| JPH09166653A (ja) * | 1995-12-18 | 1997-06-24 | Ricoh Co Ltd | 磁束検出用コイルおよび磁束検出プローブ |
| JP4925232B2 (ja) * | 2001-02-02 | 2012-04-25 | 株式会社バッファロー | 電界プローブ |
| JP5151032B2 (ja) * | 2006-01-13 | 2013-02-27 | 株式会社日立製作所 | 磁界プローブ装置及び磁界プローブ素子 |
| JP2008128847A (ja) * | 2006-11-21 | 2008-06-05 | Murata Mfg Co Ltd | 測定装置 |
| KR20100034449A (ko) * | 2008-09-24 | 2010-04-01 | 삼성전자주식회사 | 전기 계측기의 프로브 |
| JP6053520B2 (ja) * | 2009-10-16 | 2016-12-27 | エンプリマス、エルエルシー | 電磁場検出システムおよびその方法 |
| JP6042693B2 (ja) * | 2012-10-22 | 2016-12-14 | 株式会社日本自動車部品総合研究所 | ポインティングベクトル計測装置 |
| WO2016189999A1 (ja) * | 2015-05-22 | 2016-12-01 | 三菱電機株式会社 | 電磁界プローブ |
-
2016
- 2016-12-20 JP JP2016247023A patent/JP6944672B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018100904A (ja) | 2018-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5616431B2 (ja) | 電流から発生する磁界を検知して電流量を推定する方法 | |
| US8378675B2 (en) | Current sensor, current measuring module and method for measuring current | |
| JP4626728B2 (ja) | 磁気検出装置 | |
| EP3508863B1 (en) | Offset current sensor structure | |
| US8018221B2 (en) | Apparatus for measuring an electric current flowing through an electrical conductor | |
| JP6944672B2 (ja) | 電磁界センサ、電磁界計測システムおよび電磁波の到来方向推定システム | |
| US20140097826A1 (en) | Current sensor | |
| JP4635544B2 (ja) | 電界分布測定方法及び電界分布測定装置 | |
| JP2017072456A5 (ja) | ||
| KR20150009455A (ko) | 전류 센서 | |
| US10274521B2 (en) | Multiple sensor based Rogowski coil | |
| US20170059623A1 (en) | Non-contact sensor based rogowski coil | |
| US20180292469A1 (en) | Method and arrangement for determining the transverse sensitivity of magnetic field sensors | |
| JPWO2018199067A1 (ja) | 磁気センサー | |
| WO2013145928A1 (ja) | 電流検出装置及び電流検出方法 | |
| EP3676620B1 (en) | Hall effect current sensor | |
| JP6671986B2 (ja) | 電流センサおよびその製造方法 | |
| JP6671985B2 (ja) | 電流センサ | |
| US10082527B2 (en) | Removal of higher order magnetic interference in magnetic field based current sensors | |
| Schneider et al. | Integrating giant magneto-resistive (GMR) field detectors for high bandwidth current sensing in power electronic modules | |
| JP2013053914A (ja) | 電流測定装置 | |
| KR101180221B1 (ko) | 자기저항센서를 이용한 전류프로브 | |
| JP2021001832A (ja) | 電流センサ | |
| JP6881937B2 (ja) | 電流センサ | |
| US20140132255A1 (en) | Surface current probe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201006 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210316 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210902 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6944672 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |