JP6910360B2 - 保守用車両および方法 - Google Patents
保守用車両および方法 Download PDFInfo
- Publication number
- JP6910360B2 JP6910360B2 JP2018536835A JP2018536835A JP6910360B2 JP 6910360 B2 JP6910360 B2 JP 6910360B2 JP 2018536835 A JP2018536835 A JP 2018536835A JP 2018536835 A JP2018536835 A JP 2018536835A JP 6910360 B2 JP6910360 B2 JP 6910360B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- work
- maintenance vehicle
- track
- maintenance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012423 maintenance Methods 0.000 title claims description 32
- 238000000034 method Methods 0.000 title claims description 8
- 238000003754 machining Methods 0.000 claims description 11
- 230000008878 coupling Effects 0.000 claims description 8
- 238000010168 coupling process Methods 0.000 claims description 8
- 238000005859 coupling reaction Methods 0.000 claims description 8
- 238000005259 measurement Methods 0.000 claims description 2
- 241001669679 Eleotris Species 0.000 claims 1
- 238000005553 drilling Methods 0.000 description 3
- 239000011324 bead Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61D—BODY DETAILS OR KINDS OF RAILWAY VEHICLES
- B61D15/00—Other railway vehicles, e.g. scaffold cars; Adaptations of vehicles for use on railways
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B29/00—Laying, rebuilding, or taking-up tracks; Tools or machines therefor
- E01B29/16—Transporting, laying, removing, or replacing rails; Moving rails placed on sleepers in the track
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B31/00—Working rails, sleepers, baseplates, or the like, in or on the line; Machines, tools, or auxiliary devices specially designed therefor
- E01B31/02—Working rail or other metal track components on the spot
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Manipulator (AREA)
- Machines For Laying And Maintaining Railways (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
Claims (11)
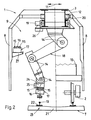
- 保守用車両(1)であって、端側で複数のレール走行装置(2)上に支持された車両フレーム(3)から成り、該車両フレーム(3)に配置されている複数の側壁(8)を備え、該側壁(8)によって画定された作業スペース(9)が軌道(7)上に位置する労働力に対して提供される、保守用車両(1)において、
前記作業スペース(9)内に位置する軌道区分を加工するために、少なくとも3つの運動軸(14)と、エネルギ供給に用いられる媒体用連結装置(15)と、軌道加工工具(17)に選択的に結合するための工具用連結装置(16)とを有する産業用ロボット(18)が、当該保守用車両(1)に配置されていることを特徴とする、保守用車両(1)。 - 前記産業用ロボット(18)は、駆動装置(19)によって、前記保守用車両(1)の車両長手方向(6)に延在しているロボットガイド(20)に摺動可能に支持されていることを特徴とする、請求項1記載の保守用車両(1)。
- 前記ロボットガイド(20)は、鉛直線に関して前記作業スペース(9)の上側の画定部を形成している前記車両フレーム(3)に配置されていることを特徴とする、請求項2記載の保守用車両(1)。
- 前記産業用ロボット(18)は、特に連結装置側の端部(24)に配置されたセンサ系(25)であって、前記作業スペース(9)内でアクセス可能であり、レール(13)と、まくらぎ(21)と、レール締結装置(22)とから構成された軌道構成要素(23)を非接触式に走査するセンサ系(25)を有することを特徴とする、請求項1から3までのいずれか1項記載の保守用車両(1)。
- 前記産業用ロボット(18)に対応して配置された制御装置(26)は、前記センサ系(25)によって検出され前記産業用ロボット(18)によって加工された前記軌道構成要素(23)の作業品質を表すパラメータを記憶するように構成されていることを特徴とする、請求項4記載の保守用車両(1)。
- 前記産業用ロボット(18)は、前記作業スペース(9)内に設けられた工具載置部(27)に選択的に取り付けられるように載置された前記軌道加工工具(17)に自動的に連結し、前記媒体用連結装置(15)を介して前記軌道加工工具(17)に自動的にエネルギを供給するように、かつこれに続いて所定のプログラムモードで自動的に進行する作業を導入するように構成されていることを特徴とする、請求項1から5までのいずれか1項記載の保守用車両(1)。
- 前記制御装置(26)は、特に前記レール(13)を取り付けるまたは取り外すための前記産業用ロボット(18)と、前記車両フレーム(3)に前記保守用車両(1)の車両長手方向(6)で摺動可能なスプリングバランサ(28)とを組み合わせて作業を導入するように構成されていることを特徴とする、請求項5記載の保守用車両(1)。
- 前記複数の側壁(8)は、前記保守用車両(1)の車両長手方向(6)に対して直交方向に延在する車両横方向(11)で駆動装置(12)によって互いに離反可能であることを特徴とする、請求項1から7までのいずれか1項記載の保守用車両(1)。
- 防護された作業スペース(9)を提供するために保守用車両(1)によって画定される、軌道(7)の所定の区分上で保守作業を実施する方法において、
a)作業を計画的に導入するために、適切な軌道加工工具(17)を、前記作業スペース(9)内で予め載置された工具(17)の群から選択し、自動的に、産業用ロボット(18)に機械的に連結するだけではなく、完全なエネルギ供給に関して連結し、
b)前記産業用ロボット(18)に配置されたセンサ系(25)を用いて、前記工具(17)の後続の作業を自動的に導入するための基準ベースを提供するために、加工されるべき軌道構成要素(23)を非接触式に走査する、
ことを特徴とする、方法。 - 前記作業の導入中に、前記センサ系(25)によって、前記軌道構成要素(23)を非接触式に走査し、得られた測定データを記憶された目標状態と比較することを特徴とする、請求項9記載の方法。
- 前記作業の導入を、前記センサ系(25)によって目標状態の到達が記録されるまで自動的に繰り返される複数の作業工程から構成することを特徴とする、請求項10記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016000408.8 | 2016-01-14 | ||
| DE102016000408.8A DE102016000408A1 (de) | 2016-01-14 | 2016-01-14 | Instandhaltungsfahrzeug und Verfahren. |
| PCT/EP2016/002048 WO2017121441A1 (de) | 2016-01-14 | 2016-12-06 | Instandhaltungsfahrzeug und verfahren |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019503299A JP2019503299A (ja) | 2019-02-07 |
| JP2019503299A5 JP2019503299A5 (ja) | 2019-12-12 |
| JP6910360B2 true JP6910360B2 (ja) | 2021-07-28 |
Family
ID=57539200
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018536835A Active JP6910360B2 (ja) | 2016-01-14 | 2016-12-06 | 保守用車両および方法 |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US10940874B2 (ja) |
| EP (1) | EP3402709B1 (ja) |
| JP (1) | JP6910360B2 (ja) |
| CN (2) | CN108463388B (ja) |
| AU (1) | AU2016385836B2 (ja) |
| DE (1) | DE102016000408A1 (ja) |
| DK (1) | DK3402709T3 (ja) |
| ES (1) | ES2779779T3 (ja) |
| HU (1) | HUE049164T2 (ja) |
| PL (1) | PL3402709T3 (ja) |
| PT (1) | PT3402709T (ja) |
| WO (1) | WO2017121441A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019205764A1 (de) | 2019-04-23 | 2020-10-29 | Robel Bahnbaumaschinen Gmbh | Bearbeitungsanlage und Verfahren zum Durchführen von Gleisarbeiten |
| DE202019102984U1 (de) * | 2019-05-27 | 2020-08-28 | Robel Bahnbaumaschinen Gmbh | Trennschleifmaschine zum Durchtrennen einer Schiene eines Gleises |
| ES2729815B2 (es) * | 2019-07-02 | 2020-05-13 | Univ Valencia Politecnica | Instalacion para vias ferreas con placas prefabricadas y procedimiento automatizado de montaje de la misma |
| DE102019212186A1 (de) * | 2019-08-14 | 2021-02-18 | Robel Bahnbaumaschinen Gmbh | Bearbeitungsanlage und Verfahren zum Durchführen von Gleisarbeiten |
| DE102020201689A1 (de) | 2020-02-11 | 2021-08-12 | Robel Bahnbaumaschinen Gmbh | Bearbeitungsanlage und Verfahren zum Durchführen von Gleisarbeiten |
| DE102020207437A1 (de) | 2020-06-16 | 2021-12-16 | Robel Bahnbaumaschinen Gmbh | Vorrichtung zur Gleisbearbeitung |
| DE102021202939A1 (de) | 2021-03-25 | 2022-09-29 | Robel Bahnbaumaschinen Gmbh | Verfahren und Vorrichtung zum Durchführen von Gleisarbeiten |
| AT17744U1 (de) * | 2021-08-24 | 2023-01-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Arbeitsfahrzeug zur Durchführung von Arbeitseinsätzen auf einem Gleis |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1166876A (en) | 1966-12-09 | 1969-10-15 | Toyo Rayon Co Ltd | Reinforced Rubber Structure and method of producing the same |
| AT402519B (de) | 1990-02-06 | 1997-06-25 | Plasser Bahnbaumasch Franz | Kontinuierlich verfahrbare gleisbaumaschine zum verdichten der schotterbettung eines gleises |
| DE9206335U1 (de) | 1992-05-12 | 1992-07-23 | Hermann Wiebe Grundstücks- und Maschinenanlagen KG, 2800 Bremen | Schienengebundenes Trägerfahrzeug |
| ATA47295A (de) | 1995-03-16 | 1996-07-15 | Plasser Bahnbaumasch Franz | Gleisbaufahrzeug |
| US6787726B2 (en) * | 1997-12-16 | 2004-09-07 | Holland Lp | Rail welding apparatus incorporating rail restraining device, weld containment device, and weld delivery unit |
| US6655296B2 (en) | 2001-04-11 | 2003-12-02 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft M.B.H. | Method of renewing damaged ties of a track |
| DE10201095C1 (de) * | 2002-01-09 | 2003-12-18 | Siemens Ag | Vorrichtung zur automatischen Verlegung von Balisen im Gleisbett |
| DE20208835U1 (de) | 2002-06-07 | 2002-10-10 | ROBEL Bahnbaumaschinen GmbH, 83395 Freilassing | Instandhaltungsfahrzeug |
| AT6158U3 (de) | 2003-01-29 | 2004-03-25 | Plasser Bahnbaumasch Franz | Maschine zur behandlung eines gleises |
| DE202004013732U1 (de) | 2004-09-03 | 2004-12-16 | Robel Bahnbaumaschinen Gmbh | Instandhaltungsfahrzeug |
| JP5332042B2 (ja) * | 2009-10-20 | 2013-11-06 | 株式会社安川電機 | 線路保守装置及び線路保守システム |
| DE102009051583A1 (de) | 2009-10-21 | 2011-04-28 | IPR-Intelligente Peripherien für Roboter GmbH | Robotersystem und Verfahren zum Verlegen eines Schienenstrangs |
| DE202009014493U1 (de) | 2009-10-27 | 2010-02-04 | Robel Bahnbaumaschinen Gmbh | Fahrzeug zur Instandhaltung eines Gleises |
| DE102010022679A1 (de) * | 2010-06-04 | 2011-12-08 | Robel Bahnbaumaschinen Gmbh | Fahrzeugkombination zum Transport von Schienen |
| US20120192756A1 (en) * | 2011-01-31 | 2012-08-02 | Harsco Corporation | Rail vision system |
| CN202318314U (zh) | 2011-12-15 | 2012-07-11 | 哈尔滨岛田大鹏工业有限公司 | 机器人自动更换夹具机构 |
| DE202012002222U1 (de) | 2012-03-02 | 2012-04-17 | Db Bahnbaugruppe Gmbh | Fahrzeug zur Durchführung von Baumaßnahmen im Gleisbereich des Eisenbahnverkehrs |
| DE202016000509U1 (de) * | 2016-01-27 | 2016-03-02 | Robel Bahnbaumaschinen Gmbh | Instandhaltungsfahrzeug |
-
2016
- 2016-01-14 DE DE102016000408.8A patent/DE102016000408A1/de not_active Withdrawn
- 2016-12-06 JP JP2018536835A patent/JP6910360B2/ja active Active
- 2016-12-06 AU AU2016385836A patent/AU2016385836B2/en active Active
- 2016-12-06 WO PCT/EP2016/002048 patent/WO2017121441A1/de active Application Filing
- 2016-12-06 PL PL16809287T patent/PL3402709T3/pl unknown
- 2016-12-06 CN CN201680079026.7A patent/CN108463388B/zh active Active
- 2016-12-06 PT PT168092872T patent/PT3402709T/pt unknown
- 2016-12-06 US US16/068,906 patent/US10940874B2/en active Active
- 2016-12-06 ES ES16809287T patent/ES2779779T3/es active Active
- 2016-12-06 EP EP16809287.2A patent/EP3402709B1/de active Active
- 2016-12-06 HU HUE16809287A patent/HUE049164T2/hu unknown
- 2016-12-06 CN CN201910910574.5A patent/CN110578275B/zh active Active
- 2016-12-06 DK DK16809287.2T patent/DK3402709T3/da active
Also Published As
| Publication number | Publication date |
|---|---|
| PT3402709T (pt) | 2020-03-27 |
| AU2016385836A1 (en) | 2018-07-05 |
| DK3402709T3 (da) | 2020-04-27 |
| CN110578275B (zh) | 2022-05-13 |
| EP3402709B1 (de) | 2020-01-29 |
| AU2016385836B2 (en) | 2021-07-22 |
| DE102016000408A1 (de) | 2017-07-20 |
| US10940874B2 (en) | 2021-03-09 |
| US20190016350A1 (en) | 2019-01-17 |
| HUE049164T2 (hu) | 2020-09-28 |
| CN108463388A (zh) | 2018-08-28 |
| CN108463388B (zh) | 2020-02-07 |
| EP3402709A1 (de) | 2018-11-21 |
| ES2779779T3 (es) | 2020-08-19 |
| CN110578275A (zh) | 2019-12-17 |
| WO2017121441A1 (de) | 2017-07-20 |
| JP2019503299A (ja) | 2019-02-07 |
| PL3402709T3 (pl) | 2020-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6910360B2 (ja) | 保守用車両および方法 | |
| CN104858748B (zh) | 一种叶片进排气边磨削机器人自动化装备 | |
| JP2019503299A5 (ja) | ||
| KR102311707B1 (ko) | 공작기계 | |
| US20190217441A1 (en) | Robotized hammering method and robotized system for implementing the method | |
| US10550525B2 (en) | Method and device for compacting the ballast bed of a track | |
| KR20110091937A (ko) | 작업성 향상 기능을 갖는 철도차량용 드릴시스템 | |
| CN104093523A (zh) | 复合加工方法及复合加工装置 | |
| EP2584419A2 (en) | CNC machine for cutting with plasma, oxygen and water jet used as a cutting tool with automatic setting up a precise position of a cutting tool in a cutting head by autocalibration and method thereof | |
| JP2011530414A (ja) | 動いているワークピースへの作業を実施するための方法及び装置 | |
| US20170021461A1 (en) | Tube-profile cutting machine and method for cutting a contour | |
| SU1297736A3 (ru) | Машина на рельсовом ходу дл непрерывного сн ти неровностей с поверхности рельсов железнодорожного пути | |
| RU2690897C1 (ru) | Комплекс роботизированный для ремонта дефектов продольных швов труб, изготовленных с применением технологии лазерной сварки | |
| CN205415025U (zh) | 一种钢板切割夹具 | |
| JP7023937B2 (ja) | 板状工作物の加工のための工具機械および方法 | |
| WO2013158052A1 (en) | Laser processing machine with at least one sensor on a movable part of the machine | |
| CN104729449B (zh) | 金刚石刀头参数自动测量装置 | |
| JP2023529091A (ja) | つき固め機を自動自律制御する方法 | |
| JP6980187B2 (ja) | 被締付部材緊解機及び被締付部材緊解機用ソケット | |
| JP6696824B2 (ja) | はつり装置 | |
| JP5198885B2 (ja) | 工作機械、およびワーク加工方法 | |
| JP7344748B2 (ja) | レーザ加工機 | |
| RU2759273C1 (ru) | Универсальный каркасный модуль и система для лазерной обработки протяженных объектов вращения | |
| JP6971498B2 (ja) | 集塵装置及びその集塵装置を備えたワーク加工装置 | |
| US1812726A (en) | Peening apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191029 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210706 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6910360 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |