以下、発明の実施の形態を通じて本発明を説明する。下記の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
図1は、本実施形態における使用者10によって使用される情報管理システム20の概略図である。図中に矢印で示すように、以降の説明においては、使用者10の右手側を右(座標上、−X方向)、使用者10の左手側を左(座標上、+X方向)、使用者10の頭部側を上(座標上、+Y方向)、使用者10の足側を下(座標上、−Y方向)と記載する。また、使用者10の身体の前面(腹部側)が向かう方向を前方(座標上、−Z方向)、使用者10の背面(背中側)が向かう方向を後方(座標上、+Z方向)と記載する場合がある。
情報管理システム20は、使用者10の上体に装着されるウェアラブル装置(筋力補助装置)40、および、使用者10などが所持する携帯端末30(例えば、スマートフォンやタブレットやPC等)を備える。ウェアラブル装置40および携帯端末30は、有線又は無線で互いに通信する。ウェアラブル装置40および携帯端末30は、例えば、予めペアリングしておいてBLE(Bluetooth(登録商標) Low Energy)によって互いに無線通信(例、近距離通信)してもよい。
概略的には、ウェアラブル装置40は、使用者10における予め定められた動作状態に基づく締め付け力の制御と、使用者10の上体に掛かる負荷の値に基づく締め付け力の制御と、当該予め定められた動作状態および当該負荷の値の両方に基づく締め付け力の制御とを選択的に行う。ウェアラブル装置40は、当該負荷の値に基づく締め付け力の制御を行うために、使用者10の上体(例、腰、腕、背中、腹、胸、頭などの腰から上の部分)の動作(例、姿勢)を反映した物理量と、使用者10の動作(例、姿勢)を維持する筋肉の緊張の程度を反映した物理量とを測定し、使用者10の上体に掛かる負荷の値を算出する。
例えば、上体の姿勢を反映した物理量には、上体の傾きおよび旋回等の姿勢を反映した物理量が含まれる。上体の傾きの姿勢を反映した物理量には、腰の屈曲等に伴う地面に対する脊椎の角度等が含まれる。地面に対する脊椎の角度は、冠状面と矢状面の交わる中心線を指標として測定することができ、簡易的には使用者10の背中に装着した加速度センサ等によって測定することができる。また、上体の旋回の姿勢を反映した物理量には、冠状面または矢状面の回転角等が含まれ、使用者10の背中に装着した加速度センサ等によって測定することができる。
また、例えば、姿勢を維持する筋肉には、体幹筋が含まれる。体幹筋のうち、後体幹筋または前体幹筋の一部について緊張の程度を反映した値を測定することができれば、使用者10に掛かる負担(例、使用者10の上体に付与される負荷)の値を算出することができる。体幹筋のうち、前体幹筋は測定器の装着による影響を受けやすいため、後体幹筋の緊張の程度を反映した値を測定するのが好ましい。
後体幹筋を測定する場合は、いわゆる「背筋」と呼ばれている広背筋、脊柱起立筋および僧帽筋のうちいずれかの筋肉の緊張の程度を反映した値を測定するのが好ましい。また、前体幹筋を測定する場合は、いわゆる「腹筋」と呼ばれている腹直筋、腹横筋、腹斜筋のうちいずれかの筋肉の緊張の程度を反映した値を測定するのが好ましい。なお、広背筋、脊柱起立筋および僧帽筋をまとめて背筋群と呼ぶ。また、腹直筋、腹横筋、腹斜筋をまとめて腹筋群と呼ぶ。
ただし、活動している使用者10の筋肉が発生する筋力Fを直接に測定することは難しい。そこで、使用者10の筋肉が発生する筋力Fの指標として、筋肉の緊張の程度を反映した物理量を取得し、取得した物理量に基づいて筋力Fを算出することができる。これにより、比較的容易に、活動中の使用者10の筋肉が発生する筋力を測定できる。ここで、筋肉の緊張の程度を反映した物理量は、例えば、筋肉の硬さとして測定できる。
図1を参照すると、任意の衣服15を着用した使用者10が、自身の腰周りに衣服15の上からウェアラブル装置40を装着している様子が、使用者10の背面の方向視から示されている。ウェアラブル装置40は、使用者10の上体に対して脱着可能である。ウェアラブル装置40は、使用者10の腰に取り付けられ(又は巻き付けられ)、使用者10の上体(この場合は、腰)を締め付け可能なベルト部(人体用ベルト装置、腰ベルト装置)50を備える。ベルト部50は、使用者10の上体の少なくとも一部を覆って上体に装着される。ベルト部50は、使用者10の背部(例、背中)から前部(例、腹部)へと使用者10の腰に巻き付けられて、使用者10の腹部上で部分的に重ねられて固定されるベルト51を有する。ベルト51は、例えば、腰に密着させるために、伸縮性を有する布部(例、布製生地)を有する。ベルト51の固定手段としては、例えば面ファスナ、フック、ボタンなどの任意のものを用いてよい。ベルト部50は更に、ベルト51の両平面のうち、後方側の、使用者10に接触しない面(使用者10に対向しない面、使用者10に面しない方とも言う。)において、使用者10の腰の右側および左側で上下方向に沿って固定されている左側アクチュエータ55および右側アクチュエータ56を備える。
左側アクチュエータ55および右側アクチュエータ56は、例えば電磁モータを含み、電圧を印加されると、一方の回転方向(例、ベルト51が締まる方向)に回転され、ベルト51を介して使用者10の腰をベルト51の巻き付き方向(腰周り)に締め付ける。左側アクチュエータ55および右側アクチュエータ56は、電圧の印加を解除されると、他方の回転方向(例、ベルト51の締め付けが解放される方向)に回転され、ベルト51を介して使用者10の腰部の締め付けを解放できる。左側アクチュエータ55および右側アクチュエータ56の上下方向の両端は、ベルト51に固定される。なお、左側アクチュエータ55および右側アクチュエータ56が電圧を印加すると他方の回転方向に回転されて締め付けを解放する場合においては、電圧の印加を解除した場合に、左側アクチュエータ55および右側アクチュエータ56が使用者10の腰部を締め付ける構成としてもよい。
左側アクチュエータ55および右側アクチュエータ56は、電磁モータに代えて、電圧が印加されると長手方向、すなわち上下方向に伸縮する構成、例えばピエゾ素子や高分子材料などを含んでもよい。この場合、左側アクチュエータ55および右側アクチュエータ56は、収縮することで、ベルト51を介して使用者10の腰をベルト51の巻き付き方向(腰周り)に締め付ける。また、左側アクチュエータ55および右側アクチュエータ56は、伸長することで、ベルト51を介して使用者10の腰部の締め付けを解放できる。高分子材料の一例は、ポリロタキサン架橋体である。左側アクチュエータ55および右側アクチュエータ56は、平面状のポリロタキサン架橋体の両面を伸縮性の電極で挟んだシート部材を巻くことによって作製される。左側アクチュエータ55および右側アクチュエータ56は、柔軟性を有するので、着用した状態で歩行したときのユーザの違和感を低減できる。
高分子材料の他の例は、非イオン性ゲルである。この場合、左側アクチュエータ55および右側アクチュエータ56は、一対の外側電極と、一対の外側電極の間に配置されたメッシュ状のメッシュ電極と、メッシュ電極と各外側電極との間に設けられた非イオン性ゲルとを有する。非イオン性ゲルの一例は、ジメチルスルホキシドを溶媒とするポリビニルアルコールのゲルである。この左側アクチュエータ55および右側アクチュエータ56では、メッシュ電極に外側電極よりも高い電圧を印加すると、外側電極から非イオン性ゲルに負電荷が注入されて、メッシュ電極に引き寄せられる。この結果、一対の外側電極間の距離が収縮する。逆に電圧の印加を停止すると、非イオン性ゲルの弾性力によって、元の状態に戻って伸長する。この外側電極、メッシュ電極及び非イオン性ゲルの組み合わせを複数積層することによって、伸縮量を増加させることができる。
高分子材料の他の例は、ポリピロール膜である。電解液中に浸漬されたポリピロール膜は、電圧が印加されることにより、膨張または収縮する。例えば、正の電圧が印加されると、ポリピロール膜は膨張する。負の電圧が印加されると、ポリピロール膜は収縮する。左側アクチュエータ55および右側アクチュエータ56は、ポリピロール膜を含む場合、電解液が必要となるので、左側アクチュエータ55および右側アクチュエータ56を封止する必要がある。
ウェアラブル装置40は更に、ベルト51の両平面のうち、前方側の、使用者10(使用者の衣服などを含む)に接触する面(使用者10に対向する面、使用者10に面する方とも言う。)又はその面側に固定されている左側ロードセル80および右側ロードセル85と、ベルト51の両平面のうち、後方側の、使用者10に接触しない面又はその面側に固定されている制御ユニット100とを備える。ウェアラブル装置40は更に、制御ユニット100と同様、ベルト51の両平面のうち、後方側の、使用者10に接触しない面又はその面側に固定されている上側センサ群60および下側センサ群70を備える。なお、制御ユニット100は、ベルト51の内部に設けた空間に配置されてベルト51に固定されていてもよい。
左側ロードセル80および右側ロードセル85は、使用者10の腰の筋肉の硬さ(以下、「筋硬さ」とも言う。)を検出する。筋硬さとは、筋肉の硬さの指標となる数値をいう。例えば、各ロードセルを、測定の対象となる筋肉部位の体表部分に接するように設置した場合に、各ロードセルによって力の値(N)として測定される値をいう。左側ロードセル80および右側ロードセル85は、使用者10の背筋群のいずれかひとつの背筋、例えば使用者10の左側および右側の脊柱起立筋に重なる位置において、使用者10の腰に巻き付けられたベルト51によって使用者10に押し付けられるように固定される。これにより、腰の屈曲に伴って使用者10の背筋群の硬さが変化した場合に、左側ロードセル80および右側ロードセル85はそれぞれ、筋硬さの変化に応じて出力電圧を変化させる。なお、各ロードセルは、静止状態においても着用に基づいて生じる負荷の値(装着に必要な圧力等)を出力するので、筋硬さは、安静時等における筋肉に負荷がかかっていない状態で測定した値を基準値とし、測定値と基準値との差分を算出した値を用いてもよい。
また、上側センサ群60は、第1の予め定められた位置、例えば使用者10の脊椎の延在方向において、左側ロードセル80および右側ロードセル85から上側に離れた位置に配置される。なお、上側センサ群60が配置される第1の予め定められた位置は、使用者10(使用者10の衣服15を含む)に接触して使用者10の姿勢を検出する位置、すなわち姿勢検出位置とも呼ばれ得る。姿勢検出位置には、使用者10の腰から脊椎の延在方向に離れた位置が含まれてもよく、左側ロードセル80および右側ロードセル85から予め定められた方向に離れ、左側ロードセル80および右側ロードセル85が使用者10の腰に固定されたときに使用者10の背中に相当する位置が含まれてもよい。下側センサ群70は、第2の予め定められた位置、例えば使用者10の脊椎の延在方向において、左側ロードセル80および右側ロードセル85から下側に離れた位置に配置される。
図1に示される通り、ベルト部50の左側アクチュエータ55および右側アクチュエータ56、上側センサ群60、下側センサ群70、並びに、左側ロードセル80および右側ロードセル85は、制御ユニット100に対して、有線で電気的に接続される。
図2は、本実施形態における情報管理システム20が備えるウェアラブル装置40のブロック図である。前述の上側センサ群60は、上側加速度センサ61および上側ジャイロセンサ62を含み、下側センサ群70は、下側加速度センサ71および下側ジャイロセンサ72を含む。そして、ウェアラブル装置40は更に、前述の携帯端末30との通信のための送信部90を備える。
また、制御ユニット100は、使用者10の腰に掛かる負荷の大小とは異なる、使用者10の動作に関するデータに基づき、使用者10の予め定められた動作状態を検出して、当該動作状態を示すデータを出力する状態検出部120と、使用者10の上体(この場合は、腰)に掛かる(上体に対する)負荷の値を算出する負荷算出部140と、ベルト部50に付与する締め付け力を段階的(又は、連続的、断続的、漸次的)に調節する制御部110とを備える。制御ユニット100は更に、予め定められた動作状態を示すデータと、予め定められた負荷閾値と、ベルト51に付与する締め付け力とが対応付けられたルックアップテーブル(データベーステーブル)を格納して記憶している格納部150を備える。格納部150は、使用者10の腰に掛かる負荷の値を算出するための数式に関する情報も格納して記憶している。
状態検出部120は、使用者10の姿勢に関するデータに基づき、予め定められた動作状態として前屈している状態を検出して、前屈している状態(前屈状態)を示すデータを出力する姿勢検出部130と、使用者10の水平移動に関するデータに基づき、予め定められた動作状態として歩行を停止している状態を検出して、歩行を停止している状態(停止状態)を示すデータを出力する歩行検出部135とを備える。
姿勢検出部130は、上側センサ群60に含まれる上側加速度センサ61および上側ジャイロセンサ62から出力される検出データに基づき、前屈している状態を検出して、前屈している状態を示すデータを出力する。例えば、姿勢検出部130は、上側加速度センサ61および上側ジャイロセンサ62から出力される検出データに含まれる使用者10の前屈の角度の値が、予め定められた第1の角度閾値以上である場合に、前屈している状態であると判断し、予め定められた動作状態を示すデータとして、前屈している状態を示すデータを出力する。なお、使用者10がしゃがみ込んだ状態も、使用者10が前屈している状態として検出されてもよい。
ここで、姿勢検出部130が、姿勢(例、前屈)の角度の値について閾値判断する方法の一例を説明する。予め定められた姿勢に関する複数の角度閾値は、例えば格納部150に格納しておき、姿勢検出部130はこれを参照する。
前述の第1の角度閾値は、使用者10が直立している状態から前屈している状態に遷移するときの角度閾値であり、例えば鉛直方向に対して20°と定める。この場合、姿勢検出部130は、使用者10の前屈の角度の値が、20°未満の場合に「直立」状態と判断し、20°以上の場合に「前屈」状態と判断する。また、使用者10が前屈している状態から直立している状態に遷移するときの第2の角度閾値として、例えば鉛直方向に対して10°と定める。この場合、姿勢検出部130は、使用者10の前屈の角度の値が、10°よりも大きい場合に「前屈」状態であると判断し、10°以下の場合に「直立」状態であると判断する。このように、使用者10が直立している状態から前屈している状態に遷移するときの第1の角度閾値に比べて、使用者10が前屈している状態から直立している状態に遷移するときの第2の角度閾値を小さく設定する。第1の角度閾値と第2の角度閾値とを同じに設定した場合には、使用者10の前屈の角度の値がちょうど当該角度閾値くらいのときに、「直立」状態であるとの判断と、「前屈」状態であるとの判断とが小刻みに繰り返され、ベルト部50に付与する締め付け力の段階を小刻みに調節することになってしまうが、これは、上記の様に角度閾値を異ならせることで防止できる。
上側加速度センサ61および上側ジャイロセンサ62は、前述の第1の予め定められた位置に配置される。当該第1の予め定められた位置の例は、使用者10の背中の上部にある胸椎付近の位置である。胸椎付近の例は、使用者10の表皮から伸ばした法線が胸椎に到達する、表皮上の位置である。
上側加速度センサ61は、当該第1の予め定められた位置の加速度を検出して検出データを出力する。加速度センサは、例えば3軸加速度センサであり、水平方向の変位による加速度の他、重力方向の加速度も検出して、それぞれの検出データを出力する。これにより、使用者10が水平移動したり上体をひねったりした場合に生じる腰の水平方向の変位に起因する加速度の他、使用者10が前後屈したり側屈したりした場合に生じる腰の高さ方向の変位に起因する加速度も検出でき、使用者10の前傾者の角度や側屈角度などを取得できる。
上側ジャイロセンサ62は、当該第1の予め定められた位置の角速度を検出して検出データを出力する。上側ジャイロセンサ62は、例えば3軸ジャイロセンサであり、水平方向の変位による角速度の他、重力方向の角速度も検出して、それぞれの検出データを出力する。これにより、上側加速度センサ61が3軸加速度センサである場合と同様に、使用者10が水平移動したり上体をひねったりした場合に生じる腰の水平方向の変位に起因する角速度の他、使用者10が前後屈したり側屈したりした場合に生じる腰の高さ方向の変位に起因する角速度も検出でき、使用者10のひねり角などを取得できる。
姿勢検出部130には、このように複数種類の検出データが入力されるので、単一種類の検出データを用いる場合に比べて姿勢の検出精度をより向上することができる。姿勢検出部130は、上側加速度センサ61および上側ジャイロセンサ62から出力される検出データに加えて、下側加速度センサ71および下側ジャイロセンサ72から出力される検出データも用いて、使用者10が前屈している状態を検出してもよい。
歩行検出部135は、より具体的には、下側センサ群70に含まれる下側加速度センサ71から出力される検出データに基づき、歩行を停止している状態を検出して、歩行を停止している状態を示すデータを出力する。
下側加速度センサ71は、下側ジャイロセンサ72と共に、前述の第2の予め定められた位置に配置される。下側加速度センサ71および下側ジャイロセンサ72の機能等は、上側加速度センサ61および上側ジャイロセンサ62と同じであるため、説明を省略する。
下側加速度センサ71が配置される第2の予め定められた位置には、使用者10の仙骨付近の位置が含まれる。仙骨付近の位置とは、使用者10の表皮から伸ばした法線が仙骨に到達する、表皮上の位置を意味する。仙骨は、使用者10が水平移動しない限り、水平方向の変位が生じにくい。換言すると、仙骨付近の位置の加速度を検出すれば、使用者10の水平移動を検出できる。
歩行検出部135は、下側加速度センサ71から出力される、使用者10の水平方向(X軸方向、Z軸方向)の変位による加速度の検出データと、使用者10の重力方向(Y軸方向)の変位による加速度の検出データとの中から、使用者10が歩行を停止している状態を示すデータを検出する。換言すると、これらの検出データの中から、「歩行中」状態を示すデータと、「停止中」状態を示すデータを識別して、「停止中」状態を示すデータを抽出する。
具体的な手法の一例では、歩行検出部135は先ず、下側加速度センサ71からの検出データを5タップのフィルタ[-1,-1,4,-1,-1](例、バイパスフィルタ)にかけることで、センサの前後方向(Z軸方向)の加速度の変化と鉛直方向(Y軸方向)の加速度の変化とを算出する。ただし、Y軸方向については正負反転する。次に、Y軸下方向(鉛直下方向)の瞬間的な加速度の変化が大きいところを検出した後、予め定められた時間内(例えば400[msec]([ミリ秒]))にZ軸方向(前方向)の瞬間的な加速度の変化が大きいところを検出した場合に、これを歩行トリガ(トリガ信号、状態信号)とする。歩行トリガが1回発生すると「歩行可能性あり」状態とするが、この時点では、まだ「停止中」状態のままであると判断する。なお、瞬間的な加速度の変化が大きいところの検出方法として、例えば、瞬間的な加速度の変化の大きさが予め定められた閾値以上の時点を検出してもよい。
続けて、より長い予め定められた時間内(例えば800[msec])に連続で(追加的に)少なくとも1回歩行トリガ(合計2回以上の歩行トリガ)があった場合に、「歩行中」状態であると判断する。当該予め定められた時間内(この場合、800[msec])に連続で歩行トリガ(合計2回以上の歩行トリガ)がなかった場合は、「停止中」状態のままであると判断する。このようにして、歩行検出部135は、使用者10のZ軸方向の変位による加速度の検出データと、使用者10のY軸方向の変位による加速度の検出データとの中から、使用者10が歩行中であるデータと停止中であるデータとを識別して、停止中であるデータを抽出できる。例えば、制御部110は、検出した使用者10の動作状態の変化を示すトリガ(例、歩行トリガ)の種類に基づいてベルト部50の締め付け力(締め付け動作)を制御する。
なお、上述した使用者10の歩行判定は、使用者10の腰に掛かる負荷の値が予め定められた負荷閾値未満である場合にのみ利用する。例えば、制御部110は、腰に掛かる負荷の値が予め定められた負荷閾値以上である場合に、締め付け力を予め定められたレベルにまで増加させる。これにより、使用者10の腰に掛かる負荷の値が予め定められた負荷閾値以上である場合には、使用者10が歩行しているか否かに拘わらず、ウェアラブル装置40における締め付け力を予め定められたレベルにまで増加させることができる。
前述の水平方向の変位が生じにくい仙骨に対して、使用者10の胸椎は、使用者10の上体の傾きが変化した場合に、大きく変位する。よって、前述の姿勢検出部130は、使用者10が水平移動していないと仮定して、使用者10の胸椎付近の予め定められた位置に配置された上側加速度センサ61から出力される検出データのみに基づいて、使用者10の姿勢を検出する。
一方で、使用者10が水平移動するならば、前述の姿勢検出部130は、下側加速度センサ71および下側ジャイロセンサ72から出力される検出データと、上側加速度センサ61および上側ジャイロセンサ62から出力される検出データとの差分を用いて使用者10が前屈している状態を検出してもよい。これにより、上側加速度センサ61および上側ジャイロセンサ62から出力される検出データのみに基づく場合に比べて姿勢の検出精度をより向上することができる。なお、追加的に下側加速度センサ71および下側ジャイロセンサ72から出力される検出データも用いる場合には、格納部150が、使用者10の姿勢を算出する計算に用いるパラメータの値を予め格納しておき、姿勢検出部130は、当該パラメータを参照して使用者10の姿勢を算出する。格納部150には、当該パラメータに加えて、上側センサ群60と下側センサ群70との相対位置、姿勢を算出するための数式などに関する情報なども格納されている。
以上のように、姿勢検出部130は、上側加速度センサ61および上側ジャイロセンサ62から出力される検出データに基づき、動作状態として前屈している状態を検出して、前屈している状態を示すデータを出力する。また、歩行検出部135は、下側加速度センサ71から出力される検出データに基づき、動作状態として歩行を停止している状態を検出して、歩行を停止している状態を示すデータを出力する。よって、状態検出部120は、使用者10における予め定められた動作状態を示すデータとして、前屈している状態を示すデータと、歩行を停止している状態を示すデータとを、制御部110に出力する。ただし、状態検出部120は、前屈していない状態を示すデータ、および、歩行を停止していない状態を示すデータも、制御部110に出力する。例えば、前屈している状態を示すデータを「1」とし、前屈していない状態を示すデータを「0」とし、2値で表してもよい。前屈していない状態は、本実施形態においては、直立している状態に等しい。また同様に、歩行を停止している状態を示すデータ「1」とし、歩行を停止していない状態を示すデータを「0」とし、2値で表してもよい。歩行を停止していない状態は、本実施形態においては、歩行している状態(「歩行中」状態)に等しい。
負荷算出部140は、格納部150に格納された負荷を算出するための数式に関する情報を参照し、上側加速度センサ61、上側ジャイロセンサ62、下側加速度センサ71、下側ジャイロセンサ72、左側ロードセル80および右側ロードセル85から出力される各検出データから、予め定められた演算を実行して使用者10の腰に掛かる負荷の値を算出する。なお、負荷算出部140は、状態検出部120と同一の姿勢検出センサを用いている、すなわち、上側加速度センサ61、上側ジャイロセンサ62および下側加速度センサ71から出力される各検出データは負荷算出部140および状態検出部120の両方に用いられていることが理解される。
ここで、使用者10の腰に対する負荷の算出方法の一例として、例えば、使用者10の腰の負荷が変化する動作をする場合の腰椎周りの物理モデルを用いる。物理モデルでは、腰椎全体を剛体と見做す。物理モデルにおいて、腰椎の下端は、仙骨に対して回転可能に支持され、腰椎の上端は、胸椎の下端を回転可能に支持する。物理モデルでは、腰椎の前後で腹筋群が生じる筋力と、背筋群が生じる筋力とが、使用者10の腰の負荷が変化する動作の各段階において静的に釣り合うと見做す。このとき、負荷算出部140は、左側ロードセル80および右側ロードセル85の検出値の平均値を用いてもよい。
腰椎に支持された胸椎には、腰椎の背面側で収縮した背筋群が筋力を発生した場合に、当該筋力による胸椎周りの回転モーメントが作用し、これによって胸椎は使用者10の背中側に傾く。また、胸椎には、腰椎の前面側で収縮した腹筋群が筋力を発生した場合に、当該筋力による胸椎周りの回転モーメントが作用し、これによって胸椎は使用者10の前面側に傾く。このような胸椎の傾きにより、使用者10の上体が傾き、腰椎には負荷が作用する。前述の物理モデルに沿って、使用者10の腰椎の負荷を解析すると、腰椎周りでは、背筋群が生じる筋力による回転モーメントと、腹筋群が生じる筋力による回転モーメントと、使用者10の上体の重量による回転モーメントとが釣り合う。なお、使用者10の上体の重量は、使用者10の全重量の60%程度であることから、予め使用者10の体重を測定して格納部150に格納させておき、負荷算出部140が参照してもよい。
また、仙骨周りでは、背筋群が生じる筋力による回転モーメントと、腹筋群が生じる筋力による回転モーメントとが釣り合う。また、腰椎に掛かる負荷は、背筋群が生じる筋力と、腹筋群が生じる筋力と、使用者10の上体の重量との合力で表される。
上側センサ群60および下側センサ群70によって検出される使用者10の姿勢に関するデータを、使用者10の上体の重量による腰椎周りの回転モーメントの算出に使用し、左側ロードセル80および右側ロードセル85の各検出値を背筋群が生じる筋力の算出に使用する。負荷算出部140は、これらの各算出値を用いて、胸椎周りの回転モーメントの釣り合いの式と、仙骨周りの回転モーメントの釣り合いの式とを連立することで、腹筋群が生じる筋力と使用者10の上体の重量とを算出する。これにより、負荷算出部140は、背筋群が生じる筋力と、腹筋群が生じる筋力と、使用者10の上体の重量との合力で表される、腰椎に掛かる負荷を算出する。負荷算出部140は、算出した負荷の値を、制御部110に出力する。
制御部110は、状態検出部120から入力された予め定められた動作状態を示すデータ、および、負荷算出部140から入力された負荷の値に基づいて、左側アクチュエータ55および右側アクチュエータ56の動作を制御する(使用者10の上体に対するベルト部50の締め付け力を制御する、とも言う。)。例えば、制御部110は、予め定められた動作状態を示すデータおよび負荷の値に基づいて、左側アクチュエータ55および右側アクチュエータ56に印加する電圧の大きさを制御して、左側アクチュエータ55および右側アクチュエータ56の回転トルク(又は伸縮量)を制御することで、ベルト部50に付与する締め付け力を段階的に調節する。例えば、制御部110は、状態検出部120から予め定められた動作状態を示すデータが入力された場合に、格納部150に格納されているルックアップテーブルを参照し、予め定められた動作状態を示すデータに対応する締め付け力Level(締め付け段階)を特定することによって、ベルト部50に付与する締め付け力を段階的に調節する。また、追加的に又は代替的に、制御部110は、負荷算出部140から負荷の値が入力された場合に、負荷の値についての閾値判断を行い、格納部150に格納されているルックアップテーブルを参照し、閾値判断の結果に対応する締め付け力Levelを特定することによって、ベルト部50に付与する締め付け力を段階的に調節する。例えば、制御部110は、状態検出部120から、使用者10の予め定められた動作状態を示すデータが入力された場合に、締め付け力を第1の締め付け力に設定することと、負荷の値が予め定められた閾値以上である場合に、締め付け力を第1の締め付け力より大きい第2の締め付け力に設定することと、を切り替えてもよい。
格納部150には、予め定められた動作状態を示すデータおよび負荷の値に基づく左側アクチュエータ55および右側アクチュエータ56の締め付け力と、当該締め付け力を発生させる電圧の大きさとの関係式が予め測定されて格納され記憶されている。制御部110は、締め付け力Levelを特定した後に、格納部150に格納された当該関係式を参照することにより、左側アクチュエータ55および右側アクチュエータ56に印加する電圧の大きさを特定する。
制御部110は更に、送信部90を介して、使用者10の腰に掛かる負荷の値に関する負荷情報を携帯端末30に送信する。当該負荷情報は、使用者10における予め定められた動作状態に対応付けられている。
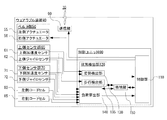
図3は、本実施形態における情報管理システム20が備える携帯端末30のブロック図である。携帯端末30は、ウェアラブル装置40から、負荷の値に関する負荷情報を受信する受信部32と、携帯端末30の動作を制御する端末制御部31と、受信部32によって受信された負荷情報を記憶する記憶部33と、記憶部33を参照して負荷情報を表示する表示部34とを備える。
携帯端末30は、随時、無線又は有線での通信によって、ウェアラブル装置40から負荷情報が入力される。携帯端末30は、入力された負荷情報を、リアルタイムで表示部34に表示させる。よって、使用者10は、ウェアラブル装置40を装着した状態で携帯端末30を所持している場合に、リアルタイムで自己の負荷情報を確認できる。なお、情報管理システム20は、携帯端末30に代えて、他の外部装置(例、サーバ)と、外部装置に有線接続されるモニタとを用いてもよい。この場合、外部装置は、受信部32と、内蔵型又はUSBメモリ等の外付け型の記憶部33とを備え、モニタは、表示部34、すなわちディスプレイを備える。
次に、図4を用いて、制御部110が、予め定められた動作状態を示すデータおよび負荷の値に基づいて、ベルト部50に付与する締め付け力を段階的に調節する方法を詳細に説明する。図4は、本実施形態におけるウェアラブル装置40における締め付け力Levelの状態遷移図である。
前述の通り、状態検出部120は、使用者10における予め定められた動作状態を示すデータとして、使用者10が前屈している状態(「前屈」状態)を示すデータと、使用者10が歩行を停止している状態(「停止中」状態)を示すデータとを制御部110に出力する。状態検出部120は更に、使用者10が前屈していない状態(「直立」状態)を示すデータ、および、歩行を停止していない状態(「歩行中」状態)を示すデータも、制御部110に出力する。
また、負荷算出部140は、各種のセンサから出力される検出データに基づいて、使用者10の腰に掛かる負荷の値を算出し、制御部110に出力する。そして、制御部110は、状態検出部120から入力された、「停止中」状態を示すデータ、「歩行中」状態を示すデータ、「前屈」状態を示すデータ、および「直立」状態を示すデータと、負荷算出部140から入力された負荷の値とに基づいて、ベルト部50に付与する締め付け力Levelを決定する。
図4を参照すると、使用者10における「停止中」状態での「直立」状態および「前屈」状態、「歩行中」状態での「直立」状態および「前屈」状態、負荷の値が予め定められた第1の負荷閾値以上であることを示す「負荷大」、並びに、負荷の値が第1の負荷閾値よりも小さい予め定められた第2の負荷閾値以下であることを示す「負荷小」のそれぞれに対し、締め付け力Levelが併記されている。具体的には、「停止中」状態での「直立」状態に対してはLevel 2、「停止中」状態での「前屈」状態に対してはLevel 3、「歩行中」状態での「直立」状態に対してはLevel 1、「歩行中」状態での「前屈」状態に対してはLevel 3、「負荷大」に対してはLevel 4、「負荷小」に対してはLevel 3がそれぞれ併記されている。なお、使用者10の腰に掛かる負荷の値が増加するときの第1の負荷閾値に比べて、負荷の値が低減するときの第2の角度閾値を小さくする理由は、上述した角度閾値を異ならせる理由と同じである。
締め付け力がLevel 1であることは、締め付け力が無く、解放状態であることを意味する。締め付け力がLevel 2であることは、予備的な弱い締め付け力が有り、予備締め(仮締め)状態であることを意味する。締め付け力がLevel 3であることは、Level 2の締め付け力よりも大きな、保護的な強い締め付け力が有り、保護締め(本締め)状態であることを意味する。締め付け力がLevel 4であることは、Level 3の締め付け力よりも大きな、よりいっそう保護的な強い締め付け力が有り、最大保護締め(最大本締め)状態であることを意味する。
従って、制御部110は、ベルト部50に付与する締め付け力を、「歩行中」状態での「直立」状態は解放状態(Level 1)とし、「停止中」状態での「直立」状態は予備締め状態(Level 2)とし、「停止中」状態での「前屈」状態は保護締め状態(Level 3)とし、「歩行中」状態でも「前屈」状態となったら、予備締め状態(Level 2)よりも保護締め状態(Level 3)を優先する。これらの状態間での遷移は、図4において矢印で示されている。そして、制御部110は、図4に示されている通り、何れの状態からでも、「負荷大」になったら最大保護締め状態(Level 4)に遷移させる。そして、制御部110は、一旦「負荷大」に遷移させたら、負荷の値が第2の負荷閾値以下となって「負荷大」から「負荷小」に遷移し、且つ、詳しくは図5を参照して後述する予め定められた条件を満たした場合にのみ、解放状態(Level 1)または予備締め状態(Level 2)に遷移させる。
また、上記の制御に加えて、制御部110は、使用者10が前屈している状態の持続時間に対応する保護締め力(Level 3)に締め付け力を調節する(使用者10が前屈している状態の持続時間に対応して、保護締め力(Level 3)を調節する、とも言う。)。換言すると、制御部110は、「停止中」状態または「歩行中」状態での「前屈」状態と判断して保護締め状態(Level 3)にした後も、締め付け力を、「前屈」状態の持続時間に対応する保護締め力(Level 3)となるように調節する。より具体的には、制御部110は、「前屈」状態の持続時間に比例して保護締め力(Level 3)を大きくしていく。
また、上記の制御に加えて、制御部110は、負荷の値に対応する最大保護締め力(Level 4)に締め付け力を調節する(負荷の値に対応して、最大保護締め力(Level 4)を調節する、とも言う。)。換言すると、制御部110は、「負荷大」と判断して最大保護締め状態(Level 4)にした後も、締め付け力を、負荷の値に対応する最大保護締め力(Level 4)となるように調節する。より具体的には、制御部110は、負荷の値に比例して最大保護締め力(Level 4)を大きくしていく。
以上の通り、制御部110は、図4に示されている状態遷移図に従い、予め定められた動作状態を示すデータおよび負荷の値に基づいてベルト部50に付与する締め付け力Levelを決定する。このように状態遷移させる目的は、第一に、使用者10の「歩行中」状態については、ウェアラブル装置40によって締め付けられていると歩行の妨げになるため、歩行中はなるべく締め付け力を解放状態にすることである。
第二に、使用者10の「停止中」状態での「直立」状態については、これから物を持ち上げるために前屈を行う可能性がある、すなわち自重による腰への負荷が増える可能性があるので、予め弱めに締め付けて予備締め状態にしておくことである。特に、いざ物を持ち上げ、腰に大きな負荷が生じてから締め付けを開始するように構成すると、左側アクチュエータ55および右側アクチュエータ56を駆動するために巻き取り式のモータを用いている場合には、モータの巻取り時間に起因して、負荷が掛かり始めたタイミングよりもアシスト力を付与するタイミングが遅くなるので、このタイムラグをなるべく小さくすることである。
第三に、使用者10の「停止中」状態での「前屈」状態については、これから物を持ち上げる可能性が、使用者10の「停止中」状態での「直立」状態よりも高く、特に、物を持つ時は瞬間的に負荷が上がる可能性があるので、予め強めに締め付けておくことである。前述のタイムラグの問題もあるが、左側アクチュエータ55および右側アクチュエータ56を駆動する方式を巻き取り式モータ以外にしてタイムラグを小さくした場合であっても、瞬間的な負荷値の増加に対応するのは難しいので、予め強めに締め付けて保護締め状態にしておく。前述の予備締めに比べて、当該保護締めは、使用者10の腰を保護するために締め付けるので、締め付け力はより強くなる。ここでの他の目的は、例えば長時間食器洗いをする場面など、「停止中」状態での軽い「前屈」状態でも、長時間同じ姿勢をしていると腰への負荷が大きくなるので、軽い「前屈」状態となった早い段階で保護締め状態にしておいて当該大きな負荷を回避することである。
前述の予備締め及び保護締めに関して、予備締めは、締め付け力の解放状態から少なくとも緩まない程度に締め付け力を増大させることを目的としており、その一方で、保護締めは、これから更に物を持ち上げる動作が始まると想定して早めに締め始めること、および、使用者10の腰にある程度負荷が掛かっても、腰を保護できるようにすることを目的としている。そこで、ウェアラブル装置40においては、予備締め状態でのモータのトルクを、保護締め状態でのモータのトルクよりも相対的に小さくする。これにより、上記の目的に沿った締め付け力を使用者10に付与できる。
第四に、「負荷大」については、予め定められた第1の負荷閾値以上に負荷の値が大きくなったときに、負荷の値に比例して最大保護締め力(Level 4)を大きくするよう、リニアな締め付け制御に切り替えることである。
第五に、「負荷小」については、負荷の値が一度、予め定められた第1の負荷閾値以上になった場合に、安全側に振る為に、前述の予め定められた条件を満たすまでは、一気に解放状態にしないよう制御する。最大保護締め状態(Level 4)から一気に解放状態(Level 1)にして使用者10に違和感や反動を与えることを回避する。
以上のように、制御部110は、図4に示されている状態遷移図に従い、予め定められた動作状態を示すデータおよび負荷の値に基づいてベルト部50に付与する締め付け力Levelを調節する。よって、ウェアラブル装置40によれば、使用者10の歩行の妨げをすることなく、前述のタイムラグを低減し、使用者10の急激な動作への対応を段階的な締め付け制御によって可能にできる。更には、使用者10の腰に掛かっている負荷の値が第1の負荷閾値以上になっていない場合でも、前屈の状態が長時間続く場合は、前屈の状態の時間に対応して締め付け力を固定値よりも強くするように調節できる。また、負荷の値が第1の負荷閾値以上になっている場合には、負荷の値の大きさに応じて、締め付け力を固定値より強くするように調節できる。
なお、ベルト部50に付与する締め付け力Level 1 からLevel 4までをどの程度に設定するかは、例えば使用者10によって、任意に設定されてもよく、調節可能であってもよい。また、ベルト部50に付与する締め付け力Levelは、5以上あってもよい。
図5は、本実施形態におけるウェアラブル装置40の格納部150に格納されているルックアップテーブルの説明図である。制御部110は、状態検出部120から予め定められた動作状態を示すデータが入力され、負荷算出部140から負荷の値が入力された場合に、格納部150に格納されているルックアップテーブルを参照し、入力された動作状態および負荷の値に対応する締め付け力Levelを特定することによって、ベルト部50に付与する締め付け力を段階的に調節する。
制御部110は、上記の特定を行う前に、負荷の値についての閾値判断を行う。より具体的には、制御部110は、締め付け力LevelをLevel 1又はLevel 2から始めてLevel 4に増加させるまで、すなわち「直立」状態から「負荷大」に至るまでの間は、前述の第1の負荷閾値を用いて、「負荷大」であるか否かの判断を行う。より具体的には、制御部110は、使用者10の腰に掛かる負荷の値が、第1の負荷閾値未満の場合に「負荷大」ではないと判断し、第1の負荷閾値以上の場合に「負荷大」であると判断する。
制御部110は、締め付け力LevelをLevel 4から始めてLevel 1又はLevel 2に低減させるまで、すなわち「負荷大」から「負荷小」を経由して「直立」状態に至るまでの間は、前述の第2の負荷閾値を用いて、「負荷小」であるか否かの判断を行う。より具体的には、制御部110は、使用者10の腰に掛かる負荷の値が、第2の負荷閾値よりも大きい場合に「負荷小」ではない(「負荷大」である)と判断し、第2の負荷閾値以下の場合に「負荷小」であると判断する。
制御部110は、以上の様にして、負荷の値についての閾値判断を行った後に、格納部150に格納されているルックアップテーブルを参照し、予め定められた動作状態を示すデータ、及び、負荷の値についての閾値判断の結果に対応する締め付け力Levelを特定する。
図5を参照すると、ルックアップテーブルには、各列の項目名の行を除いて、4列×16行のマスが設けられている。各列の項目名は、列の左側から順に、「歩行中/停止中」、「直立/前屈」、「負荷の値」、および「締め付け力Level」である。ルックアップテーブルの1行目から8行目までは、締め付け力LevelをLevel 1又はLevel 2から始めてLevel 4に増加させるまで、すなわち「直立」状態から「負荷大」に至るまでの間に用いられ、ルックアップテーブルの9行目から16行目までは、締め付け力LevelをLevel 4から始めてLevel 1又はLevel 2に低減させるまで、すなわち「負荷大」から「負荷小」を経由して「直立」状態に至るまでの間に用いられる。
制御部110は、予め定められた動作状態を示すデータと、前屈の角度の値および負荷の値についての各閾値判断結果とに基づいて、「直立」状態から「負荷大」に至るまでの間に、例えば使用者10が、「歩行中」状態での「直立」状態で、且つ、負荷の値が第1の負荷閾値未満であると判断した場合、ルックアップテーブルの1行目を抽出し、1行目に示されている締め付け力Level 1を特定する。また、例えば使用者10が、「歩行中」状態での「前屈」状態で、且つ、負荷の値が第1の負荷閾値未満であると判断した場合、ルックアップテーブルの3行目を抽出し、3行目に示されている締め付け力Level 3を特定する。また、例えば使用者10が、「歩行中」状態での「直立」状態で、且つ、負荷の値が第1の負荷閾値以上であると判断した場合、ルックアップテーブルの5行目を抽出し、5行目に示されている締め付け力Level 4を特定する。
また、制御部110は、「負荷大」から「負荷小」を経由して「直立」状態に至るまでの間に、例えば使用者10が、「歩行中」状態での「前屈」状態で、且つ、負荷の値が第2の負荷閾値より大きいと判断した場合、ルックアップテーブルの10行目を抽出し、10行目に示されている締め付け力Level 4を特定する。また、例えば使用者10が、「歩行中」状態での「前屈」状態で、且つ、負荷の値が第2の負荷閾値以下であると判断した場合、ルックアップテーブルの14行目を抽出し、14行目に示されている締め付け力Level 3を特定する。また、例えば使用者10が、「歩行中」状態での「直立」状態で、且つ、負荷の値が第2の負荷閾値以下であると判断した場合、ルックアップテーブルの16行目を抽出し、16行目に示されている締め付け力Level 1を特定する。
以上の様に、制御部110は、ルックアップテーブルを参照して、予め定められた動作状態を示すデータおよび負荷の値に対応する締め付け力Levelを特定することによって、ベルト部50に付与する締め付け力を段階的に調節する。ただし、例外的に、使用者10が前屈している状態の持続時間が予め定められた時間以上になった場合には、制御部110は、当該持続時間に対応する保護締め力(Level 3)に締め付け力を調節し、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上であって且つ予め定められた負荷値以上になった場合には、当該負荷の値に対応する最大保護締め力(Level 4)に締め付け力を調節する。なお、当該ルックアップテーブルにおいて、締め付け力Levelに代えて、2つのアクチュエータに印加する電圧値が、各締め付け力Levelに対応して格納されていてもよい。
図6は、本実施形態におけるウェアラブル装置40における締め付け力Levelの流れ図である。図6を用いて、使用者10の腰を締め付ける締め付け力を調節可能なベルト部50(ウェアラブル装置40)を駆動する駆動方法を説明する。当該駆動方法は、ベルト部50に付与する締め付け力を段階的に調節する力制御段階を備え、当該力制御段階は、制御部110によって制御される。
先ず、使用者10が歩行中であるか否かを判断し(ステップS110)、歩行中であると判断した場合に(ステップS110:Yes)締め付け力を締め付け力Level 1に設定し(ステップS120)、歩行中ではない、すなわち停止中であると判断した場合に(ステップS110:No)締め付け力を締め付け力Level 2に設定する(ステップS130)。
ステップS120およびステップS130に続けて、使用者10が前屈している状態であるか否かを判断し(ステップS140)、前屈している状態であると判断した場合には(ステップS140:Yes)、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上であるか否かを判断する(ステップS160)。また、ステップS140において、前屈している状態ではない、すなわち直立している状態であると判断した場合には(ステップS140:No)、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上であるか否かを判断する(ステップS150)。
ステップS150において、負荷の値が第1の負荷閾値以上ではない、すなわち第1の負荷閾値未満であると判断した場合には(ステップS150:No)、ステップS110に戻る。一方で、ステップS150において、負荷の値が第1の負荷閾値以上であると判断した場合には(ステップS150:Yes)、締め付け力を締め付け力Level 4に設定する(ステップS210)。
ステップS160において、負荷の値が第1の負荷閾値以上ではない、すなわち第1の負荷閾値未満であると判断した場合には(ステップS160:No)、締め付け力を締め付け力Level 3に設定する(ステップS170)。一方で、ステップS160において、負荷の値が第1の負荷閾値以上であると判断した場合には(ステップS160:Yes)、締め付け力を締め付け力Level 4に設定する(ステップS210)。
ステップS170に続けて、使用者10が前屈している状態であるか否かを判断し(ステップS180)、前屈している状態であると判断した場合には(ステップS180:Yes)、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上であるか否かを判断する(ステップS190)。また、ステップS180において、前屈している状態ではない、すなわち直立している状態であると判断した場合には(ステップS180:No)、締め付け力を締め付け力Level 2に設定する(ステップS200)。
ステップS190において、負荷の値が第1の負荷閾値以上ではない、すなわち第1の負荷閾値未満であると判断した場合には(ステップS190:No)、ステップS180に戻る。一方で、ステップS190において、負荷の値が第1の負荷閾値以上であると判断した場合には(ステップS190:Yes)、締め付け力を締め付け力Level 4に設定する(ステップS210)。
以上で説明したステップS110からステップS210までは、制御部110が、締め付け力LevelをLevel 1又はLevel 2から始めてLevel 4に増加させるまで、すなわち「直立」状態から「負荷大」に至るまでの間の流れである。以降のステップは、制御部110が、締め付け力LevelをLevel 4から始めてLevel 1又はLevel 2に低減させるまで、すなわち「負荷大」から「負荷小」を経由して「直立」状態に至るまでの間の流れである。
ステップS210に続けて、使用者10の腰に掛かる負荷の値が第2の負荷閾値以下であるか否かを判断し(ステップS220)、負荷の値が第2の負荷閾値以下ではない、すなわち第2の負荷閾値よりも大きいと判断した場合には(ステップS220:No)、ステップS220を繰り返す。一方で、ステップS220において、負荷の値が第2の負荷閾値以下であると判断した場合には(ステップS220:Yes)、締め付け力を締め付け力Level 3に設定する(ステップS230)。
ステップS230に続けて、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上であるか否かを判断し(ステップS240)、負荷の値が第1の負荷閾値以上ではない、すなわち第1の負荷閾値未満であると判断した場合には(ステップS240:No)、使用者10が前屈している状態であるか否かを判断する(ステップS250)。一方で、ステップS240において、負荷の値が第1の負荷閾値以上であると判断した場合には(ステップS240:Yes)、締め付け力を締め付け力Level 4に設定して(ステップS260)、ステップS220に戻る。
ステップS250において、使用者10が前屈している状態であると判断した場合には(ステップS250:Yes)、ステップS240に戻り、前屈している状態ではない、すなわち直立している状態であると判断した場合には(ステップS250:No)、終了する。
図6に示される、開始から終了までの流れはウェアラブル装置40の電源がONである限りにおいて繰り返され、すなわち、上記で説明した図6における流れは、終了したら、再度開始する。なお、図6における流れは、本実施形態の理解を助けるために説明されたものであり、使用者10の腰に掛かる負荷の値が第1の負荷閾値以上である場合には、使用者10が歩行しているか否かに拘わらず、すなわち図6における各判断の順序に拘わらず、ウェアラブル装置40における締め付け力をLevel 4にまで増加させる。
図6で説明された力制御段階において、ステップS110からステップS210までの間に、締め付け力をLevel 1又はLevel 2から始めてLevel 3に増加させるまでの複数の段階が示されたが、当該複数の段階は、使用者10における予め定められた動作状態に基づき、力制御段階における各締め付け力のうち第1の締め付け力まで締め付け力を増加させる第1の力増加段階の一例である。また、ステップS110からステップS210までの間に、締め付け力をLevel 2又はLevel 3から始めてLevel 4に増加させるまでの複数の段階が示されたが、当該複数の段階は、使用者10の上体に掛かる負荷の値が予め定められた第1の負荷閾値以上である場合に、第1の締め付け力から第2の締め付け力まで締め付け力を増加させる第2の力増加段階の一例である。
前述の第1の締め付け力は、第3の締め付け力と、第3の締め付け力よりも大きい第4の締め付け力とを含み、前述の第1の力増加段階は、予め定められた動作状態に使用者10が歩行を停止している状態が含まれる場合、使用者10が歩行を停止している状態に基づき、第3の締め付け力まで締め付け力を増加させる(第3の締め付け力に締め付け力を調節する)第3の力増加段階を含み、図6におけるステップS110およびステップS130の組み合わせに対応する。また、前述の第1の力増加段階は、予め定められた動作状態に使用者10が前屈している状態が含まれる場合、使用者10が前屈している状態に基づき、第4の締め付け力まで締め付け力を増加させる第4の力増加段階を含み、図6におけるステップS140およびステップS170の組み合わせに対応する。
また、前述の第1の力増加段階は、予め定められた動作状態に含まれる、使用者10が歩行中に前屈している状態に基づき、第3の力増加段階よりも第4の力増加段階を優先し、図6におけるステップS120、ステップS140およびステップS170の組み合わせに対応する。例えば、制御部110は、使用者10の前屈状態に基づき、第3の力増加段階と第4の力増加段階とのうち第4の力増加段階を選択して第4の力増加段階まで締め付け力を増加させるように設定する。
また、図6には示されていないが、前述の力制御段階は、使用者10が前屈している状態の持続時間に対応する第4の締め付け力に締め付け力を調節する(使用者10が前屈している状態の持続時間に対応して、第4の締め付け力を調節する、とも言う。)第1の力調節段階を含み、また、負荷の値に対応する第2の締め付け力に締め付け力を調節する(負荷の値に対応して、第2の締め付け力を調節する、とも言う。)第2の力調節段階も含む。
また、図6で説明された力制御段階において、ステップS210からステップS260までの間に、締め付け力をLevel 4から始めてLevel 1又はLevel 2に低減させるまでの複数の段階が示された。前述の力制御段階は、第2の締め付け力で締め付けている状態で、負荷の値が、予め定められた第1の負荷閾値よりも小さい予め定められた第2の負荷閾値以下である場合に、第2の締め付け力よりも小さな第5の締め付け力まで締め付け力を低減させる第1の力低減段階を含み、図6におけるステップS210、ステップS220およびステップS230の組み合わせに対応する。
また、前述の力制御段階において、使用者10の前屈の角度の値が、予め定められた第1の角度閾値以上である場合に、使用者10が前屈している状態であると判断し、これは図6におけるステップS140およびステップS180のそれぞれに対応する。また、前述の力制御段階において、第5の締め付け力で締め付けている状態で、前屈の角度の値が、第1の角度閾値よりも小さい予め定められた第2の角度閾値以下である場合に、使用者10が直立している状態であると判断し、これは図6におけるステップS250に対応する。
また、前述の第1の力増加段階において、使用者10が前屈している状態に基づき、第1の締め付け力まで締め付け力を増加させ、図6におけるステップS140およびステップS170の組み合わせに対応する。また、前述の力制御段階は、第5の締め付け力で締め付けている状態で、使用者10が直立している状態に基づき、第5の締め付け力よりも小さな第6の締め付け力まで締め付け力を低減させる第2の力低減段階を備え、図6におけるステップS250と、ステップS250に続けて流れを終了した後に再度開始したときの、ステップS110と、ステップS120またはステップS130とに対応する。
また、前述の力制御段階は、第5の締め付け力で締め付けている状態で、使用者10が歩行中である状態に基づいて、締め付け力を解放させ、図6におけるステップS230からS250と、ステップS250に続けて流れを終了した後に再度開始したときの、ステップS110とおよびステップS120に対応する。また、前述の力制御段階は、第6の締め付け力で締め付けている状態で、使用者10が歩行中である状態に基づいて、締め付け力を解放させる。
図7は、実施例による、ウェアラブル装置40における締め付け力Levelの状態遷移を示すグラフである。本実施例における当グラフには、これまで説明したウェアラブル装置40の制御アルゴリズムを検証した結果が示されている。当グラフにおいて、使用者10の前屈の角度の値の変位を示すグラフ(縦軸の範囲は0°から90°である。)と、使用者10の腰に掛かる負荷の値の変位を示すグラフ(縦軸の範囲は0 Nから2500 Nである。)と、使用者10の歩行状態(歩行検出)の変位を示すグラフ(縦軸は歩行中を「1」として、停止中を「0」としている。)と、これらのデータ(前屈の角度の値、負荷の値、歩行状態など)に基づいて特定された締め付け力Level(制御Levelとも言う。)と、が縦軸方向に並べられている。何れのグラフも、横軸は時間軸である。
図7のグラフの上部には、使用者10の行動内容(動作内容)が示されている。具体的には、時系列に沿って、「歩行」、「その場で荷物を持ち上げて下す」、「歩行」、「荷物を持ち上げて歩行、止まって下す」および「歩行」といった行動内容が時間経過に沿って連続的に示されている。時系列に沿って、これらの行動(動作)に対応する上記の各グラフの推移を見ると、使用者10が、「歩行」から「その場で荷物を持ち上げて下す」に移行しようとしている間に、先ずは使用者10の歩行状態が「歩行中」から「停止中」に遷移し、これに伴って、制御レベルがLevel 1からLevel 2へと遷移している。この状態の遷移は、図6を用いて説明した流れにおいて、ステップS120から始まり、ステップS140およびステップS150を経由して、ステップS110へと戻り、ステップS130となることに対応する。
次に、使用者10の前屈の角度の値が、第1の角度閾値として設定されている20°以上となり、これに伴って、制御レベルがLevel 2からLevel 3へと遷移している。この遷移は、図6を用いて説明した流れにおいて、ステップS130から始まり、ステップS140およびステップS160を経由して、ステップS170となることに対応する。
続けて、使用者10の腰に掛かる負荷の値が、第1の負荷閾値として設定されている700N以上となり、これに伴って、制御レベルがLevel 3からLevel 4へと遷移している。この状態の遷移は、図6を用いて説明した流れにおいて、ステップS170から始まり、ステップS180およびステップS190を経由して、ステップS210となることに対応する。
次に使用者10が、「その場で荷物を持ち上げて下す」から「歩行」に移行しようとしている間に、先ずは使用者10の腰に掛かる負荷の値が、第2の負荷閾値として設定されている500N以下となり、これに伴って、制御レベルがLevel 4からLevel 3へと遷移している。この遷移は、図6を用いて説明した流れにおいて、ステップS210から始まり、ステップS220を経由して、ステップS230となることに対応する。
そして、使用者10の前屈の角度の値が、第2の角度閾値として設定されている10°以下となり、これに伴って、制御レベルがLevel 3からLevel 2へと遷移している。この遷移は、図6を用いて説明した流れにおいて、ステップS230から始まり、ステップS240およびステップS250を経由して、終了した後に再度開始して、ステップS110を経由して、ステップS130となることに対応する。
次に、使用者10の歩行状態が「停止中」から「歩行中」に遷移し、これに伴って、制御レベルがLevel 2からLevel 1へと遷移している。この遷移は、図6を用いて説明した流れにおいて、ステップS130から始まり、ステップS140およびステップS150を経由して、ステップS110へと戻り、ステップS120となることに対応する。
次に、使用者10が、「歩行」から「物を持ち上げて歩行、止まって下す」に移行しようとしている間には、前述の「歩行」から「その場で荷物を持ち上げて下す」への遷移と同じであり、また、使用者10が、「物を持ち上げて歩行、止まって下す」から「歩行」に移行しようとしている間には、前述の「その場で荷物を持ち上げて下す」から「歩行」への遷移と同じであるので、重複する説明を省略する。ただし、「物を持ち上げて歩行、止まって下す」という行動内容に示されている通り、使用者10が「歩行中」の状態である。しかしながら、制御部110は、当該行動中おいては、使用者10の腰に大きな負荷が掛かっている(「負荷大」)ので、「負荷大」に対応する締め付け力Levelを維持する。
このように、使用者10が腰に対するアシスト力を付与されたいと感じるタイミング、すなわち、使用者10が歩行を停止していてこれから物を持とうとしているタイミングや、使用者10の上体が前屈しているタイミングや、使用者10が荷物を持ったタイミングのそれぞれに対応する制御Levelがそれぞれ出力されていることが理解される。このように、ウェアラブル装置は、制御部110によって本締めの前に予備締めをしておくことで、例えば前述したタイムラグの発生を防止することができる。
なお、図7では、第1の負荷閾値700Nよりも小さな第2の負荷閾値500N以下であれば、前屈の角度が第2の角度閾値以下である限りにおいて、制御部110はLevel 2まで締め付け力を低減させる構成として説明したが、これに代えて、前屈の角度が第2の角度閾値以下で、且つ、第2の負荷閾値500Nよりも小さな第3の負荷閾値以下である場合においてのみ、制御部110はLevel 2まで締め付け力を低減させてもよい。例えば、制御部110は、第1の負荷閾値と第2の角度閾値とに基づいて、締め付け力を選択的に設定する。
本実施形態によれば、図6を用いて説明した力制御段階をベルト51に実行させるアプリケーションも提供される。例えば、使用者の上体を締め付ける締め付け力を調節可能なベルトのためのアプリケーションプログラムであって、締め付け力を段階的に調節する力制御段階(例、力増加段階、力減少段階など)をベルトに実行させ、力制御段階(例、力増加段階、力減少段階)は、使用者10における予め定められた動作状態に基づき、第1の締め付け力まで締め付け力を増加する第1の力増加段階と、第1の締め付け力で締め付けている状態で、使用者の上体に掛かる負荷の値が予め定められた第1の負荷閾値以上である場合に、第1の締め付け力から第2の締め付け力まで締め付け力を増加する第2の力増加段階とを有する、アプリケーションプログラムが提供される。
以上の実施形態において、ウェアラブル装置40は、算出された負荷値のデータを、随時、無線又は有線により携帯端末30に出力し、携帯端末30の表示部34に、リアルタイムで負荷値のデータを表示させる構成とした。代替的に又は追加的に、負荷算出部140によって算出された負荷値のデータは、格納部150に蓄積的に記憶させて、無線又は有線により外部装置、例えばスマートフォンやパソコンに後から出力し、蓄積した負荷値のデータをディスプレイなどに表示させてもよい。
以上の実施形態において、使用者10の腰の筋硬さを検出する左側ロードセル80および右側ロードセル85は、追加的に又は代替的に、使用者10の腰の筋肉の動きに係る皮膚表面の電位の変化を検出する筋電位センサであってもよい。また、上側センサ群60および下側センサ群70は、追加的に、使用者の腰の方向を検出する地磁気センサを含んでもよい。
以上の実施形態において、制御部110は、第5の締め付け力で締め付けている状態で、状態検出部120から使用者10が直立している状態を示すデータが入力され、且つ、負荷算出部140から入力された負荷の値が、第2の負荷閾値よりも小さい予め定められた第3の負荷閾値以下である場合に、第5の締め付け力よりも小さな第6の締め付け力まで締め付け力を低減させてもよい。
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現しうることに留意すべきである。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。