JP6887060B2 - 位置指示装置及び情報処理装置 - Google Patents
位置指示装置及び情報処理装置 Download PDFInfo
- Publication number
- JP6887060B2 JP6887060B2 JP2020519507A JP2020519507A JP6887060B2 JP 6887060 B2 JP6887060 B2 JP 6887060B2 JP 2020519507 A JP2020519507 A JP 2020519507A JP 2020519507 A JP2020519507 A JP 2020519507A JP 6887060 B2 JP6887060 B2 JP 6887060B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- sensor
- pen
- space
- communication unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03545—Pens or stylus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
- G06F3/0317—Detection arrangements using opto-electronic means in co-operation with a patterned surface, e.g. absolute position or relative movement detection for an optical mouse or pen positioned with respect to a coded surface
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03545—Pens or stylus
- G06F3/03546—Pens or stylus using a rotatable ball at the tip as position detecting member
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0414—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position
- G06F3/04146—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position using pressure sensitive conductive elements delivering a boolean signal and located between crossing sensing lines, e.g. located between X and Y sensing line layers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/04162—Control or interface arrangements specially adapted for digitisers for exchanging data with external devices, e.g. smart pens, via the digitiser sensing hardware
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G06F3/04815—Interaction with a metaphor-based environment or interaction object displayed as three-dimensional, e.g. changing the user viewpoint with respect to the environment or object
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/04845—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range for image manipulation, e.g. dragging, rotation, expansion or change of colour
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
- G06F3/04883—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures for inputting data by handwriting, e.g. gesture or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04105—Pressure sensors for measuring the pressure or force exerted on the touch surface without providing the touch position
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
Description
C=ε(S−ΔS)/d・・・(1)
2 コンピュータ
2a 制御部
2b メモリ
3 仮想現実ディスプレイ
4 平面位置センサ
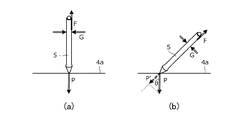
4a 入力面
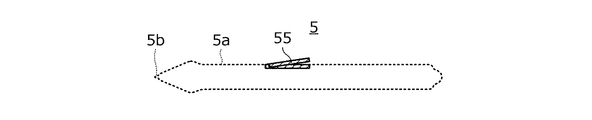
5 電子ペン
5a 外部筐体
5b ペン先
7a,7b 位置検出用機器
8a〜8c 空間位置センサ
10,12 電極板
11 誘電体
13 芯体
14 ボタン機構
15 感圧センサ
16 基板
17 ドームボタン
18,21 電極板
19 誘電体
20 ラバー
22 グリップ部材
22a 基台
22b フィンガーレスト
50 処理部
51 平面通信部
52 空間通信部
53 空間位置検出部
54 筆圧センサ
55 グリップ力センサ
56 力覚発生部
A 描画領域
B 仮想タブレット
Claims (14)
- 筐体と、
位置を指示する位置指示部と、
前記位置指示部に加わる第1の圧力を検出する第1のセンサと、
前記筐体に加わる第2の圧力を検出する第2のセンサと、
前記第1のセンサによって検出された前記第1の圧力を送信する第1の通信部と、
前記第2のセンサによって検出された前記第2の圧力を送信する第2の通信部と、
を備える位置指示装置。 - 前記第1の通信部は、前記位置指示部に前記第1の圧力を加える第1の装置に前記第1の圧力を送信する通信部であり、
前記第2の通信部は、仮想現実空間における3Dオブジェクトの生成を制御する第2の装置に前記第2の圧力を送信する通信部である、
請求項1に記載の位置指示装置。 - 前記第1のセンサによって検出された前記第1の圧力と所定値とを比較するコントローラをさらに有し、
前記第2の通信部は、前記コントローラによる比較の結果に応じて、前記第1の圧力または前記第2の圧力を送信する通信部である、
請求項1または2に記載の位置指示装置。 - 前記第1及び第2のセンサは、前記第1及び第2の圧力の両方を検出可能に構成された共通のセンサによって構成される、
請求項1に記載の位置指示装置。 - 前記第2のセンサは、前記筐体への押圧力を感知するタッチセンサにより構成される、
請求項1乃至3のいずれか一項に記載の位置指示装置。 - 前記第2のセンサは、段階的又は連続的に押下量を検出するボタン機構により構成される、
請求項1乃至3のいずれか一項に記載の位置指示装置。 - 前記共通のセンサは、前記筐体に配置されたボタン機構の押下量と、前記第1の圧力との双方により静電容量が変化する容量センサにより構成される、
請求項4に記載の位置指示装置。 - 前記第2のセンサは、オンオフ可能に構成されるドームボタンと、前記筐体への押圧力を感知する感圧センサとにより構成される、
請求項1乃至3のいずれか一項に記載の位置指示装置。 - 筐体、位置を指示する位置指示部、及び、前記筐体に加わる力を検出する圧力センサを有する位置指示装置と通信可能な情報処理装置であって、
前記圧力センサによって検出された圧力を受信する通信部と、
空間内における前記位置指示装置の位置及び前記通信部によって受信した圧力に基づいて、仮想現実空間における3Dオブジェクトの生成を制御するとともに前記3Dオブジェクトの線幅を制御するコントローラと、
を有する情報処理装置。 - 前記コントローラは、
仮想現実空間に描画領域を設定し、
前記空間内における前記位置指示装置の位置が前記仮想現実空間に設定される描画領域内にあるか否かを判定し、
前記空間内における前記位置指示装置の位置が前記描画領域内にあると判定した場合に前記3Dオブジェクトの生成を制御する
請求項9に記載の情報処理装置。 - 前記コントローラは、
前記位置指示部に加わる第1の圧力と前記圧力センサによって検出される第2の圧力との相関性を取得し、
前記取得した相関性に基づいて前記第2の圧力を変換することによって生成される圧力に基づいて前記3Dオブジェクトの生成を制御する
請求項9に記載の情報処理装置。 - 前記コントローラは、
前記空間内における前記位置指示装置の位置及び前記位置指示部に加わる圧力に基づいて、仮想現実空間における3Dオブジェクトの生成を制御する、
請求項9に記載の情報処理装置。 - 前記コントローラは、
前記位置指示装置に圧力を加える外部の装置が有する入力面における前記位置指示装置によって指示される位置及び前記位置指示部に加わる圧力に基づいて、2D描画を制御する
請求項9に記載の情報処理装置。 - 前記コントローラは、
前記位置指示装置の前記位置指示部が接触面に接触している場合に、空間内における前記位置指示装置の位置および前記通信部によって受信した前記位置指示部に加わる圧力に基づいて、仮想現実空間における3Dオブジェクトの生成を制御するとともに前記3Dオブジェクトの線幅を制御し、
前記位置指示装置の前記位置指示部が接触面に接触していない場合に、空間内における前記位置指示装置の位置及び前記通信部によって受信した前記圧力センサによって検出された圧力に基づいて、仮想現実空間における3Dオブジェクトの生成を制御するとともに前記3Dオブジェクトの線幅を制御する、
請求項9に記載の情報処理装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021083044A JP7373258B2 (ja) | 2018-05-18 | 2021-05-17 | 位置指示装置、コンピュータ、制御方法 |
| JP2023180098A JP2023174898A (ja) | 2018-05-18 | 2023-10-19 | 位置指示装置、コンピュータ、制御方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018096313 | 2018-05-18 | ||
| JP2018096313 | 2018-05-18 | ||
| PCT/JP2019/015042 WO2019220803A1 (ja) | 2018-05-18 | 2019-04-04 | 位置指示装置及び情報処理装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021083044A Division JP7373258B2 (ja) | 2018-05-18 | 2021-05-17 | 位置指示装置、コンピュータ、制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019220803A1 JPWO2019220803A1 (ja) | 2021-06-10 |
| JP6887060B2 true JP6887060B2 (ja) | 2021-06-16 |
Family
ID=68540195
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020519507A Active JP6887060B2 (ja) | 2018-05-18 | 2019-04-04 | 位置指示装置及び情報処理装置 |
| JP2021083044A Active JP7373258B2 (ja) | 2018-05-18 | 2021-05-17 | 位置指示装置、コンピュータ、制御方法 |
| JP2023180098A Pending JP2023174898A (ja) | 2018-05-18 | 2023-10-19 | 位置指示装置、コンピュータ、制御方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021083044A Active JP7373258B2 (ja) | 2018-05-18 | 2021-05-17 | 位置指示装置、コンピュータ、制御方法 |
| JP2023180098A Pending JP2023174898A (ja) | 2018-05-18 | 2023-10-19 | 位置指示装置、コンピュータ、制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210048897A1 (ja) |
| EP (1) | EP3796136A4 (ja) |
| JP (3) | JP6887060B2 (ja) |
| CN (1) | CN112074802A (ja) |
| WO (1) | WO2019220803A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11815968B2 (en) * | 2017-12-14 | 2023-11-14 | Societe Bic | Stylus for a touchscreen |
| JP7321995B2 (ja) * | 2018-03-23 | 2023-08-07 | 株式会社ワコム | 位置指示器及び位置検出システム |
| JP7401427B2 (ja) * | 2018-05-21 | 2023-12-19 | 株式会社ワコム | 位置指示デバイス及び空間位置指示システム |
| US20220004299A1 (en) * | 2020-07-01 | 2022-01-06 | Wacom Co., Ltd. | Systems and methods for dynamic shape sketching |
| KR20220012073A (ko) | 2020-07-22 | 2022-02-03 | 삼성전자주식회사 | 가상 사용자 인터랙션을 수행하기 위한 방법 및 그 장치 |
| CN112835457A (zh) * | 2021-02-06 | 2021-05-25 | 上海萃钛智能科技有限公司 | 一种3d魔术笔及基于该3d魔术笔的显示系统及其使用方法 |
| EP4328717A1 (en) | 2021-04-23 | 2024-02-28 | Wacom Co., Ltd. | Controller and computer |
| EP4310640A1 (en) | 2021-05-06 | 2024-01-24 | Samsung Electronics Co., Ltd. | Electronic device and control method for electronic device |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4430488A1 (de) | 1994-08-27 | 1996-02-29 | Porsche Ag | Rad für ein Kraftfahrzeug |
| JPH10333815A (ja) * | 1997-06-04 | 1998-12-18 | Brother Ind Ltd | 画像認識装置 |
| JP4677269B2 (ja) * | 2005-04-08 | 2011-04-27 | キヤノン株式会社 | 情報処理方法およびシステム |
| JP2009266097A (ja) * | 2008-04-28 | 2009-11-12 | Toshiba Corp | 入力機器 |
| US8988398B2 (en) * | 2011-02-11 | 2015-03-24 | Microsoft Corporation | Multi-touch input device with orientation sensing |
| JP2013084096A (ja) | 2011-10-07 | 2013-05-09 | Sharp Corp | 情報処理装置 |
| JP2013242819A (ja) * | 2012-05-23 | 2013-12-05 | Hitachi Consumer Electronics Co Ltd | ペン型入力装置 |
| JP2014062962A (ja) | 2012-09-20 | 2014-04-10 | Sony Corp | 情報処理装置、筆記具、情報処理方法およびプログラム |
| KR101360980B1 (ko) * | 2013-02-05 | 2014-02-11 | 주식회사 카이언스 | 필기구형 전자 입력장치 |
| JP6286846B2 (ja) | 2013-03-25 | 2018-03-07 | セイコーエプソン株式会社 | プロジェクター、指示体、インタラクティブシステムおよび制御方法 |
| US9489048B2 (en) * | 2013-12-13 | 2016-11-08 | Immersion Corporation | Systems and methods for optical transmission of haptic display parameters |
| CN111913606A (zh) * | 2015-04-20 | 2020-11-10 | 株式会社和冠 | 传感器控制器、主机处理器、通信方法和系统 |
| CN105551339A (zh) * | 2015-12-31 | 2016-05-04 | 英华达(南京)科技有限公司 | 基于虚拟现实技术的书法练习系统及方法 |
| JP6916506B2 (ja) * | 2016-07-08 | 2021-08-11 | 国立大学法人大阪大学 | 筆記装置及びコンピュータープログラム |
| US10073548B2 (en) * | 2016-11-08 | 2018-09-11 | Wacom Co., Ltd. | Stylus having variable transmit signal strength, and sensor for detecting such stylus |
-
2019
- 2019-04-04 WO PCT/JP2019/015042 patent/WO2019220803A1/ja active Application Filing
- 2019-04-04 EP EP19804098.2A patent/EP3796136A4/en active Pending
- 2019-04-04 JP JP2020519507A patent/JP6887060B2/ja active Active
- 2019-04-04 CN CN201980029211.9A patent/CN112074802A/zh active Pending
-
2020
- 2020-10-29 US US17/084,444 patent/US20210048897A1/en active Pending
-
2021
- 2021-05-17 JP JP2021083044A patent/JP7373258B2/ja active Active
-
2023
- 2023-10-19 JP JP2023180098A patent/JP2023174898A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP3796136A1 (en) | 2021-03-24 |
| US20210048897A1 (en) | 2021-02-18 |
| CN112074802A (zh) | 2020-12-11 |
| EP3796136A4 (en) | 2021-07-14 |
| WO2019220803A1 (ja) | 2019-11-21 |
| JP2021114346A (ja) | 2021-08-05 |
| JP2023174898A (ja) | 2023-12-08 |
| JPWO2019220803A1 (ja) | 2021-06-10 |
| JP7373258B2 (ja) | 2023-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6887060B2 (ja) | 位置指示装置及び情報処理装置 | |
| US8237656B2 (en) | Multi-axis motion-based remote control | |
| US20100090949A1 (en) | Method and Apparatus for Input Device | |
| CN111344663B (zh) | 渲染装置及渲染方法 | |
| US11853486B2 (en) | Stylus and position calculation method | |
| CN111819524A (zh) | 使用了电子笔的输入装置 | |
| KR20170076534A (ko) | 가상 현실 인터페이스 장치 및 제어 방법 | |
| CN109189245A (zh) | 一种智能笔及该智能笔实现鼠标功能的方法 | |
| KR20100009023A (ko) | 움직임을 인식하는 장치 및 방법 | |
| US20150002486A1 (en) | Multifunctional pencil input peripheral computer controller | |
| US10082885B2 (en) | Information input and output apparatus and information input and output method | |
| KR102572675B1 (ko) | 사용자 인터페이스를 적응적으로 구성하기 위한 장치 및 방법 | |
| CN208999971U (zh) | 一种具有鼠标功能的智能笔 | |
| KR20130128723A (ko) | 방향 입력장치 및 이를 이용한 사용자 인터페이스 조작 방법 | |
| KR20050116041A (ko) | 가속도센서로 구성된 디지털 펜 | |
| KR20040020262A (ko) | 펜 타입의 다기능 마우스 입력장치 | |
| WO2013032410A1 (en) | Multifunctional pencil input peripheral computer controller | |
| JP7339470B2 (ja) | コントローラ及びコンピュータ | |
| KR102337816B1 (ko) | 입력장치 및 이를 이용한 데이터 입력방법 | |
| CN115968465A (zh) | 计算机、方法及程序 | |
| KR100349757B1 (ko) | 컴퓨터용 입력장치 | |
| KR101066829B1 (ko) | 공간 입력장치 및 이를 이용한 입력방법 | |
| CN116648926A (zh) | 带有具有磁场跟踪的外围设备的系统 | |
| WO2010090608A2 (en) | Pencil input peripheral computer controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210304 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210304 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20210315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210420 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210517 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6887060 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |