JP6865270B2 - 組織を処置するためのシステムおよびクリップアセンブリ - Google Patents
組織を処置するためのシステムおよびクリップアセンブリ Download PDFInfo
- Publication number
- JP6865270B2 JP6865270B2 JP2019511932A JP2019511932A JP6865270B2 JP 6865270 B2 JP6865270 B2 JP 6865270B2 JP 2019511932 A JP2019511932 A JP 2019511932A JP 2019511932 A JP2019511932 A JP 2019511932A JP 6865270 B2 JP6865270 B2 JP 6865270B2
- Authority
- JP
- Japan
- Prior art keywords
- clip
- arm
- clip arm
- applicator
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 73
- 230000036544 posture Effects 0.000 description 17
- 238000000034 method Methods 0.000 description 7
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000000740 bleeding effect Effects 0.000 description 3
- 230000002496 gastric effect Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 1
- 206010044684 Trismus Diseases 0.000 description 1
- 210000003445 biliary tract Anatomy 0.000 description 1
- 238000012277 endoscopic treatment Methods 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 230000002439 hemostatic effect Effects 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 210000005166 vasculature Anatomy 0.000 description 1
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/08—Wound clamps or clips, i.e. not or only partly penetrating the tissue ; Devices for bringing together the edges of a wound
- A61B17/083—Clips, e.g. resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
- A61B17/1222—Packages or dispensers therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/10—Surgical instruments, devices or methods, e.g. tourniquets for applying or removing wound clamps, e.g. containing only one clamp or staple; Wound clamp magazines
- A61B17/105—Wound clamp magazines
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
- A61B17/1227—Spring clips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/128—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips
- A61B17/1285—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
- A61B2017/0053—Loading magazines or sutures into applying tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00778—Operations on blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00818—Treatment of the gastro-intestinal system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Reproductive Health (AREA)
- Surgical Instruments (AREA)
Description
一態様において、一対のクリップアームのうちの第1のクリップアームは、第1のクリップアームから一対のクリップアームのうちの第2のクリップアームに向かって延びる雄ロック機構を含み得、かつ、第2のクリップアームは、雌ロック機構を含む。
一態様において、雌ロック機構は、雌ロック機構内に雄ロック機構を受け入れるように変形可能であり得る。
一態様において、クリップアームは、屈曲して一対のクリップアームを画定する単品の材料によって形成され得る。
Claims (10)
- 第1のクリップアセンブリをアプリケータに連結可能であるとともに、前記第1のクリップアセンブリが配置された後、第2のクリップアセンブリを配置するために前記第2のクリップアセンブリを前記アプリケータに連結可能である、組織を把持するための再装填可能なシステムであって、
前記第1及び第2のクリップアセンブリの各々は、一対のクリップアームを含み、当該クリップアームの近位端がヨークに接続され、前記第1及び第2のクリップアセンブリの各々は、前記クリップアームの遠位端の間に標的組織を受け入れるために前記遠位端が互いに離反するように付勢された組織受入姿勢と、組織把持姿勢との間で移行可能であり、前記クリップアームが当該クリップアームを前記組織把持姿勢にロックするためのロック機構を含み、前記ロック機構が、各クリップアームのそれぞれにおいて、対応する嵌合機構を含み、前記一対のクリップアームのうちの第1のクリップアームは、前記第1のクリップアームから前記一対のクリップアームのうちの第2のクリップアームに向かって延びる雄ロック機構を含み、かつ、前記第2のクリップアームは、雌ロック機構を含み、前記雄ロック機構と前記雌ロック機構とは、前記クリップアームを互いにロックするために互いに係合可能であり、
前記アプリケータは、スリーブと、前記スリーブを通って延びる制御部材とを含み、前記スリーブは、近位端から遠位端まで延びるとともに、前記スリーブを通って延びるルーメンを含み、前記制御部材は、近位端から遠位端まで延び、前記第1のクリップアセンブリを前記組織受入姿勢と前記組織把持姿勢との間で移行させるために前記ヨークに着脱可能に連結されるように構成され、前記クリップアームは、当該クリップアームが当該ルーメン内に近位側に引き込まれた場合に前記ルーメンの表面によって前記組織把持姿勢に拘束され、前記アプリケータは、当該アプリケータから前記第1のクリップアセンブリを解放した後、前記第2のクリップアセンブリと着脱可能に連結されるように構成される、
システム。 - 前記雄ロック機構は、前記雌ロック機構内に受け入れられるように変形可能である、請求項1に記載のシステム。
- 前記雌ロック機構は、前記雌ロック機構内に前記雄ロック機構を受け入れるように変形可能である、請求項1に記載のシステム。
- 前記ロック機構は、前記一対のクリップアームのうちの第1のクリップアームに対向する長手方向の縁部から、前記一対のクリップアームのうちの第2のクリップアームに向かって延びる一対のロック顎を含み、前記一対のロック顎は、把持端部を含み、前記把持端部は、前記第2のクリップアーム上にスナップ留めされて、前記クリップアームを互いにロックするように構成される、請求項1に記載のシステム。
- 前記ヨークは、近位開口部から遠位空間まで延びる長手のスロットを含み、前記長手のスロットは、前記制御部材の拡大遠位端が前記近位開口部を遠位側に通って前記遠位空間に移動できるように変形可能な対向部によって画定される、請求項1−4のいずれか一項に記載のシステム。
- 前記ヨークは、前記拡大遠位端によって前記ヨークに作用する力が所定の閾値を超えた場合には、変形されるように構成される、請求項5に記載のシステム。
- 前記クリップアームは、屈曲して前記一対のクリップアームを画定する単品の材料によって形成される、請求項1−6のいずれか一項に記載のシステム。
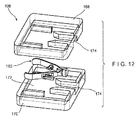
- 前記第1のクリップアセンブリを収容するためのカートリッジを更に備え、前記カートリッジは、当該カートリッジに形成され、前記第1のクリップアセンブリを収容するための溝と、当該カートリッジの外部から当該カートリッジの内部に延びて前記溝と連通する開口部とを含み、前記開口部は、前記アプリケータの遠位部を受け入れるような寸法及び形状である、請求項1−7のいずれか一項に記載のシステム。
- 前記アプリケータは、前記スリーブから近位側に延びる可撓性部材と、前記可撓性部材の近位端に接続されたハンドル部材と、前記ハンドル部材に連結され、前記第1のクリップアセンブリを前記組織受入姿勢と前記組織把持姿勢との間で移行させるためのアクチュエータとを含む、請求項1−8のいずれか一項に記載のシステム。
- 前記ハンドル部材は、当該ハンドル部材から延びて前記アクチュエータと中継して、前記スリーブに対する前記制御部材の前記遠位端の位置に関係する触覚フィードバックを使用者に提供する突起を含む、請求項9に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662398284P | 2016-09-22 | 2016-09-22 | |
| US62/398,284 | 2016-09-22 | ||
| PCT/US2017/051381 WO2018057370A1 (en) | 2016-09-22 | 2017-09-13 | Hemostasis clip with reloadable clipping mechanism |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019526356A JP2019526356A (ja) | 2019-09-19 |
| JP6865270B2 true JP6865270B2 (ja) | 2021-04-28 |
Family
ID=60083412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019511932A Active JP6865270B2 (ja) | 2016-09-22 | 2017-09-13 | 組織を処置するためのシステムおよびクリップアセンブリ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10820903B2 (ja) |
| EP (1) | EP3484378A1 (ja) |
| JP (1) | JP6865270B2 (ja) |
| CN (1) | CN109788958A (ja) |
| AU (1) | AU2017330257B2 (ja) |
| CA (1) | CA3030999C (ja) |
| WO (1) | WO2018057370A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020136826A1 (ja) * | 2018-12-27 | 2020-07-02 | オリンパス株式会社 | 医療機器、および医療機器の装着方法 |
| JP7241917B2 (ja) * | 2019-07-16 | 2023-03-17 | ボストン サイエンティフィック サイムド,インコーポレイテッド | 再装填可能な止血デバイス用クリップの圧着取付け |
| CN114615942A (zh) * | 2019-11-05 | 2022-06-10 | 波士顿科学国际有限公司 | 组织采集螺旋装置 |
| USD1028240S1 (en) * | 2019-11-19 | 2024-05-21 | Pointsource Technologies, Llc | Radioactive therapeutic device |
| CN111421752A (zh) * | 2020-04-20 | 2020-07-17 | 广东造裕力讯智能科技有限公司 | 管件埋入取出治具 |
| CN111544075B (zh) * | 2020-06-12 | 2024-10-01 | 南微医学科技股份有限公司 | 一种新型止血夹 |
| CN114145804B (zh) * | 2020-09-07 | 2024-01-16 | 江苏风和医疗器材股份有限公司 | 组织夹 |
| WO2022047782A1 (zh) * | 2020-09-07 | 2022-03-10 | 江苏风和医疗器材股份有限公司 | 组织夹 |
| US20220211359A1 (en) * | 2021-01-06 | 2022-07-07 | Covidien Lp | Wire gripping device |
| JP7389155B2 (ja) * | 2021-02-12 | 2023-11-29 | オリンパスメディカルシステムズ株式会社 | クリップ装置 |
| WO2022173024A1 (en) * | 2021-02-12 | 2022-08-18 | Olympus Medical Systems Corp. | Clip device and method of operating clip device |
| CN113081143B (zh) * | 2021-05-25 | 2022-05-31 | 广州科慧健远医疗科技有限公司 | 一种组织夹持装置 |
| CN118119352A (zh) * | 2021-09-30 | 2024-05-31 | 杭州安杰思医学科技股份有限公司 | 一种夹子器械 |
| JP7104927B1 (ja) | 2022-01-05 | 2022-07-22 | 国立大学法人高知大学 | 医療用クリップ |
| CN116115288B (zh) * | 2023-03-10 | 2024-03-12 | 江苏唯德康医疗科技有限公司 | 一种止血夹组件及包含其的止血夹 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4667671A (en) * | 1985-11-15 | 1987-05-26 | Danzig Fred G | Apparatus for ligating blood vessels, nerves and other anatomical structures |
| US5156609A (en) | 1989-12-26 | 1992-10-20 | Nakao Naomi L | Endoscopic stapling device and method |
| US5487746A (en) | 1994-11-23 | 1996-01-30 | Yu; George W. | Surgical clip having a longitudinal opening through which clamped tissue protrudes |
| US5713911A (en) | 1996-10-03 | 1998-02-03 | United States Surgical Corporation | Surgical clip |
| US7727247B2 (en) * | 2002-08-21 | 2010-06-01 | Olympus Corporation | Living tissue ligation device |
| ATE545373T1 (de) | 2003-11-07 | 2012-03-15 | Scimed Life Systems Inc | Endoskopisches hämoskopisches clip-gerät |
| JP2006158668A (ja) * | 2004-12-07 | 2006-06-22 | Olympus Corp | 内視鏡用処置装置 |
| US20080208324A1 (en) | 2007-02-23 | 2008-08-28 | Glithero Jason I | Method and apparatus for occluding an anatomical structure |
| EP2113208A3 (en) | 2008-05-02 | 2010-01-20 | Fujifilm Corporation | Multiple clip device and multiple clip application apparatus |
| DE102009022271A1 (de) * | 2009-05-22 | 2010-11-25 | Medi-Globe Gmbh | Applikationsvorrichtung zum Applizieren, insbesondere zum endoskopischen Applizieren eines medizinischen Clips im oder am Körper eines Individuums |
| JP5588711B2 (ja) | 2010-03-30 | 2014-09-10 | 富士フイルム株式会社 | 結紮装置 |
| US8945177B2 (en) * | 2011-09-13 | 2015-02-03 | Abbott Cardiovascular Systems Inc. | Gripper pusher mechanism for tissue apposition systems |
| JP5343113B2 (ja) * | 2011-09-15 | 2013-11-13 | 富士フイルム株式会社 | クリップユニット及びこれを用いる結紮装置 |
| US20140316440A1 (en) * | 2013-02-01 | 2014-10-23 | Mark Gordon | Multiple clip endoscopic tissue clipping system and device |
| CN104124549B (zh) | 2013-04-23 | 2016-11-02 | 富士康(昆山)电脑接插件有限公司 | 电连接器 |
| CA2915510C (en) | 2013-07-10 | 2017-09-26 | Boston Scientific Scimed, Inc. | Tissue grasping and wound closing clipping device |
-
2017
- 2017-09-12 US US15/702,446 patent/US10820903B2/en active Active
- 2017-09-13 AU AU2017330257A patent/AU2017330257B2/en active Active
- 2017-09-13 EP EP17784059.2A patent/EP3484378A1/en active Pending
- 2017-09-13 CN CN201780058694.6A patent/CN109788958A/zh active Pending
- 2017-09-13 WO PCT/US2017/051381 patent/WO2018057370A1/en unknown
- 2017-09-13 JP JP2019511932A patent/JP6865270B2/ja active Active
- 2017-09-13 CA CA3030999A patent/CA3030999C/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CA3030999A1 (en) | 2018-03-29 |
| US20180078258A1 (en) | 2018-03-22 |
| US10820903B2 (en) | 2020-11-03 |
| CN109788958A (zh) | 2019-05-21 |
| EP3484378A1 (en) | 2019-05-22 |
| AU2017330257B2 (en) | 2019-12-05 |
| CA3030999C (en) | 2022-07-19 |
| WO2018057370A1 (en) | 2018-03-29 |
| AU2017330257A1 (en) | 2019-02-07 |
| JP2019526356A (ja) | 2019-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6865270B2 (ja) | 組織を処置するためのシステムおよびクリップアセンブリ | |
| JP6761898B2 (ja) | 再充填可能止血クリップ解放機構 | |
| JP7059335B2 (ja) | スリーブに係合部を備える再搭載可能な止血クリップ装置 | |
| JP6694975B2 (ja) | 組織を治療するためのシステム | |
| EP3481308B1 (en) | Multiple opening/closing of reloadable clip | |
| JP2022066329A (ja) | 止血クリップ | |
| US20170020531A1 (en) | Reloadable mechanical device for ligating living tissue and achieving hemostasis | |
| EP3534805B1 (en) | User actuated reloadable clip cartridge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200701 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201001 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210316 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6865270 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S631 | Written request for registration of reclamation of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313631 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S631 | Written request for registration of reclamation of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313631 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |