JP6854877B2 - 太陽追尾装置 - Google Patents
太陽追尾装置 Download PDFInfo
- Publication number
- JP6854877B2 JP6854877B2 JP2019501755A JP2019501755A JP6854877B2 JP 6854877 B2 JP6854877 B2 JP 6854877B2 JP 2019501755 A JP2019501755 A JP 2019501755A JP 2019501755 A JP2019501755 A JP 2019501755A JP 6854877 B2 JP6854877 B2 JP 6854877B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- tracking device
- sun tracking
- optical sensor
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 claims description 55
- 230000007246 mechanism Effects 0.000 claims description 17
- 238000000034 method Methods 0.000 claims description 12
- 230000004044 response Effects 0.000 claims description 5
- 238000001514 detection method Methods 0.000 claims description 4
- 230000003213 activating effect Effects 0.000 claims description 2
- 239000000758 substrate Substances 0.000 description 9
- 230000008569 process Effects 0.000 description 6
- 238000009434 installation Methods 0.000 description 5
- 230000001960 triggered effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 239000011358 absorbing material Substances 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 125000003636 chemical group Chemical group 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 150000001875 compounds Chemical group 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 230000000873 masking effect Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000007788 roughening Methods 0.000 description 1
- 239000000126 substance Chemical group 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
- H02S20/30—Supporting structures being movable or adjustable, e.g. for angle adjustment
- H02S20/32—Supporting structures being movable or adjustable, e.g. for angle adjustment specially adapted for solar tracking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
- F24S50/20—Arrangements for controlling solar heat collectors for tracking
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/782—Systems for determining direction or deviation from predetermined direction
- G01S3/785—Systems for determining direction or deviation from predetermined direction using adjustment of orientation of directivity characteristics of a detector or detector system to give a desired condition of signal derived from that detector or detector system
- G01S3/786—Systems for determining direction or deviation from predetermined direction using adjustment of orientation of directivity characteristics of a detector or detector system to give a desired condition of signal derived from that detector or detector system the desired condition being maintained automatically
- G01S3/7861—Solar tracking systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/10—Control of position or direction without using feedback
- G05D3/105—Solar tracker
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F77/00—Constructional details of devices covered by this subclass
- H10F77/40—Optical elements or arrangements
- H10F77/42—Optical elements or arrangements directly associated or integrated with photovoltaic cells, e.g. light-reflecting means or light-concentrating means
- H10F77/488—Reflecting light-concentrating means, e.g. parabolic mirrors or concentrators using total internal reflection
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
- F24S50/20—Arrangements for controlling solar heat collectors for tracking
- F24S2050/25—Calibration means; Methods for initial positioning of solar concentrators or solar receivers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/40—Solar thermal energy, e.g. solar towers
- Y02E10/47—Mountings or tracking
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
- Y02E10/52—PV systems with concentrators
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Sustainable Energy (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Thermal Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Photovoltaic Devices (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
Description
Claims (14)
- 一次光学センサ(30)と、
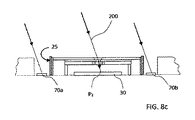
少なくとも2つの補助光学センサ(70;70a,70b)と、
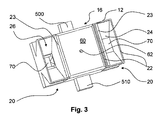
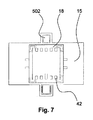
ハウジング(12)であって、前記一次光学センサ(30)が下に配置される中央孔(100;62;82)を備えた上面(80)と、前記中央穴(100;62;82)のまわりで側方に配置された光井であって、前記それぞれの補助センサ(70)の各々が配置される光井と、を有するハウジング(12)と、
を含む太陽追尾装置であって、
各光井が、
前記関連する補助光学センサ(70;70a,70b)が上に配置される底面(15)と、
前記上面(80)における開口部(84)と、
前記上面(80)及び前記底面(15)を接続する側壁(22,24;25)と、
を含み、
前記側壁の1つが、前記底面(15)と垂直に配置された光反射面(25)であり、全ての他の側壁(22,24)が、光吸収性である太陽追尾装置。 - 各光反射面の(25)が、前記中央孔(100;62;82)の方に面して、外側の側壁(22)に置かれる、請求項1に記載の太陽追尾装置。
- 各光反射面の(25)が、前記中央孔(100;62;82)に背を向けて、内側の前記側壁(22)に置かれる、請求項1に記載の太陽追尾装置。
- 前記一次光学センサ(30)が、位置検出素子である、請求項1〜3のいずれか一項に記載の太陽追尾装置。
- 前記位置検出素子が等方性である、請求項4に記載の太陽追尾装置。
- 前記位置検出素子が、2D離散センサアレイを含む、請求項4に記載の太陽追尾装置。
- 前記中央孔を通過する入射太陽光を前記一次光学センサ(30)上に合焦するために、前記中央孔と前記一次光学センサ(30)との間に配置された光学部品を更に含む、請求項1〜6のいずれか一項に記載の太陽追尾装置。
- 前記光学部品と前記上面(80)の前記中央孔(100;62;82)との間で位置合わせされた開口部(62)を備えたマスク(60)を更に含む、請求項7に記載の太陽追尾装置。
- 前記中央孔(100;62;82)が、前記上面(80)の方へ広くなるように面取りされる、請求項1〜8のいずれか一項に記載の太陽追尾装置。
- 各補助光学センサが、フォトダイオードを含む、請求項1〜9のいずれか一項に記載の太陽追尾装置。
- 前記各光井の前記開口部(84)が矩形であり、
前記各光井は、前記上面(80)に垂直な内側の側壁及び外側の側壁を備え、
且つ前記底面(15)の方へ内側に傾斜する隣接する側壁を備えて、
略桶状の光井を形成する、請求項1〜10のいずれか一項に記載の太陽追尾装置。 - 前記一次光学センサ(30)と、前記少なくとも2つの補助光学センサ(70;70a,70b)と動作可能に接続されたプロセッサを更に含む、請求項1〜11のいずれか一項に記載の太陽追尾装置。
- 検出光に応じて前記装置を位置決めするように動作可能な少なくとも1つの駆動機構(400)を更に含む、請求項1〜12のいずれか一項に記載の太陽追尾装置。
- 太陽追尾装置を位置決めする方法であって、
請求項13に記載された太陽追尾装置を提供することと、
前記補助センサにおける光強度と、前記一次光学センサ(30)上の入射光の位置との少なくとも1つを検出することと、
前記補助光学センサ(70;70a,70b)における前記光強度の平衡を保ち、且つ前記一次光学センサ(30)に前記入射光を合焦する目的で、前記検出光に応じて前記少なくとも1つの駆動機構(400)を作動させることと
を含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1605082.5 | 2016-03-24 | ||
| GBGB1605082.5A GB201605082D0 (en) | 2016-03-24 | 2016-03-24 | Solar tracking device |
| PCT/EP2017/056848 WO2017162752A1 (en) | 2016-03-24 | 2017-03-22 | Solar tracking device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019518930A JP2019518930A (ja) | 2019-07-04 |
| JP2019518930A5 JP2019518930A5 (ja) | 2020-04-16 |
| JP6854877B2 true JP6854877B2 (ja) | 2021-04-07 |
Family
ID=56027379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019501755A Active JP6854877B2 (ja) | 2016-03-24 | 2017-03-22 | 太陽追尾装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10690381B2 (ja) |
| EP (1) | EP3433545B1 (ja) |
| JP (1) | JP6854877B2 (ja) |
| KR (1) | KR102352431B1 (ja) |
| CN (1) | CN109073275B (ja) |
| GB (1) | GB201605082D0 (ja) |
| TW (1) | TWI746533B (ja) |
| WO (1) | WO2017162752A1 (ja) |
| ZA (1) | ZA201806084B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2021203917B2 (en) * | 2020-06-15 | 2022-07-07 | Planet A Energy, Inc. | Detector and tracker |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5812813U (ja) * | 1981-07-15 | 1983-01-27 | 三菱電機株式会社 | 人工衛星の太陽方向センサ |
| US4586488A (en) * | 1983-12-15 | 1986-05-06 | Noto Vincent H | Reflective solar tracking system |
| JPH0623923Y2 (ja) | 1987-04-21 | 1994-06-22 | 鹿島建設株式会社 | 太陽追尾センサ |
| JP2002202817A (ja) | 2000-12-28 | 2002-07-19 | Rhythm Watch Co Ltd | 太陽追尾システム |
| JP2004146745A (ja) * | 2002-10-28 | 2004-05-20 | Tsukasa Denko Kk | 太陽追尾装置 |
| JP4378257B2 (ja) * | 2004-10-13 | 2009-12-02 | 有限会社滝沢電気工事 | 太陽追尾システム |
| KR200404291Y1 (ko) | 2005-10-06 | 2005-12-21 | 권영두 | 태양광 발전용 집광유닛을 구비한 태양 추적장치 |
| WO2008048478A2 (en) * | 2006-10-13 | 2008-04-24 | Soliant Energy, Inc. | Sun sensor assembly and related method of using |
| US7906750B2 (en) * | 2007-03-30 | 2011-03-15 | Esolar, Inc. | Heliostat with integrated image-based tracking controller |
| TW200910624A (en) * | 2007-08-27 | 2009-03-01 | Jeffery Lin | Sun tracking system |
| KR101007176B1 (ko) * | 2008-07-02 | 2011-01-12 | 에이치엘비 주식회사 | 태양광 추적장치 |
| KR100981272B1 (ko) * | 2008-07-21 | 2010-09-10 | 신행철 | 태양 위치 추적 장치 및 태양전지 모듈 구동 시스템 |
| KR101131160B1 (ko) * | 2009-04-20 | 2012-04-12 | (주)모노레이 | 태양 추적 센서 및 이 센서가 장착된 집광 시스템 |
| TWM390433U (en) * | 2010-03-17 | 2010-10-11 | feng-bin Chen | Improved solar sun-tracking structure |
| US8694051B2 (en) | 2010-05-07 | 2014-04-08 | Qualcomm Incorporated | Orientation sensor calibration |
| TWI425175B (zh) * | 2010-10-21 | 2014-02-01 | Atomic Energy Council | 提高太陽能追蹤器精度之結構 |
| CN202210763U (zh) * | 2011-06-08 | 2012-05-02 | 苏州科技学院 | 一种家用太阳跟踪光伏发电装置 |
| US20120048340A1 (en) * | 2011-08-09 | 2012-03-01 | General Electric Company | Solar panel tracking system and associated tracking sensor |
| CN103425137A (zh) | 2012-05-17 | 2013-12-04 | 上海植晶生物科技有限公司 | 太阳能实时跟踪系统 |
| TWI484130B (zh) * | 2012-11-21 | 2015-05-11 | Day chase device | |
| CN203454992U (zh) * | 2013-08-21 | 2014-02-26 | 郭忠文 | 带不透光筒的太阳光照射角度传感器 |
| CN203689162U (zh) * | 2014-01-06 | 2014-07-02 | 南京工程学院 | 太阳能自动跟踪装置 |
| WO2015107559A1 (en) * | 2014-01-17 | 2015-07-23 | Donato Vincenzi | Solar pointing system |
-
2016
- 2016-03-24 GB GBGB1605082.5A patent/GB201605082D0/en not_active Ceased
-
2017
- 2017-03-22 JP JP2019501755A patent/JP6854877B2/ja active Active
- 2017-03-22 US US16/084,323 patent/US10690381B2/en active Active
- 2017-03-22 KR KR1020187030722A patent/KR102352431B1/ko active IP Right Grant
- 2017-03-22 WO PCT/EP2017/056848 patent/WO2017162752A1/en active Application Filing
- 2017-03-22 EP EP17712780.0A patent/EP3433545B1/en active Active
- 2017-03-22 CN CN201780019225.3A patent/CN109073275B/zh active Active
- 2017-03-24 TW TW106109926A patent/TWI746533B/zh active
-
2018
- 2018-09-11 ZA ZA2018/06084A patent/ZA201806084B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| GB201605082D0 (en) | 2016-05-11 |
| TWI746533B (zh) | 2021-11-21 |
| US20190078810A1 (en) | 2019-03-14 |
| JP2019518930A (ja) | 2019-07-04 |
| EP3433545A1 (en) | 2019-01-30 |
| KR102352431B1 (ko) | 2022-01-18 |
| US10690381B2 (en) | 2020-06-23 |
| CN109073275B (zh) | 2021-02-26 |
| CN109073275A (zh) | 2018-12-21 |
| KR20180123146A (ko) | 2018-11-14 |
| EP3433545B1 (en) | 2021-05-12 |
| TW201735525A (zh) | 2017-10-01 |
| ZA201806084B (en) | 2019-12-18 |
| WO2017162752A1 (en) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5184473B2 (ja) | 高効率集光用太陽光追跡装置及びその方法 | |
| TW200910624A (en) | Sun tracking system | |
| US20090126774A1 (en) | Methods, systems, and computer readable media for controlling orientation of a photovoltaic collection system to track apparent movement of the sun | |
| US20120279485A1 (en) | Optical Signal Aiming for Heliostats | |
| KR101094730B1 (ko) | 3차원 반사거울형 채광장치의 태양광 자동추적 시스템 | |
| US9070806B2 (en) | Self-powered solar tracker | |
| KR101652243B1 (ko) | 태양광 감지장치 및 이를 갖는 태양광 트랙커 | |
| JP6854877B2 (ja) | 太陽追尾装置 | |
| JP2004153203A (ja) | 集光式太陽光発電装置 | |
| KR100933661B1 (ko) | 태양위치 추적센서 및 추적방법 | |
| CN102566601B (zh) | 一种太阳跟踪传感器 | |
| JP2019518930A5 (ja) | ||
| JP3128040U (ja) | 光源追尾装置 | |
| KR100930090B1 (ko) | 태양광 추적센서 및 이를 이용한 태양광 집광장치 | |
| KR20130022752A (ko) | 태양위치 추적센서 및 추적방법 | |
| KR101530979B1 (ko) | 태양광 추적 센서 유닛 | |
| JPS5911830B2 (ja) | 太陽追尾装置 | |
| KR101137022B1 (ko) | 하이브리드식 헬리오스타트의 태양추적시스템 | |
| WO2009132394A1 (en) | Solar tracking apparatus and method | |
| CN110375676A (zh) | 一种用于双轴太阳能追踪系统的光电探测器 | |
| CN101382804A (zh) | 太阳跟踪系统 | |
| KR101494420B1 (ko) | 최소 제어 방식의 반사경이 구비된 고정형 태양광 발전기 | |
| KR101600363B1 (ko) | 태양광원 자동추적장치용 센서 | |
| KR20130022751A (ko) | 태양광 추적센서 및 이를 이용한 태양광 집광장치 | |
| KR101122593B1 (ko) | 3차원 반사거울형 채광장치의 시공방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200303 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6854877 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |