JP6853148B2 - 検知装置、検知方法及び検知プログラム - Google Patents
検知装置、検知方法及び検知プログラム Download PDFInfo
- Publication number
- JP6853148B2 JP6853148B2 JP2017172473A JP2017172473A JP6853148B2 JP 6853148 B2 JP6853148 B2 JP 6853148B2 JP 2017172473 A JP2017172473 A JP 2017172473A JP 2017172473 A JP2017172473 A JP 2017172473A JP 6853148 B2 JP6853148 B2 JP 6853148B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- abnormality
- data
- model
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Testing And Monitoring For Control Systems (AREA)
Description
まず、図1を用いて、第1の実施形態に係る検知システムの構成について説明する。図1は、第1の実施形態に係る検知システムの構成の一例を示す図である。図1に示すように、検知システム1は、検知装置10、生成装置20及び出力装置30を有する。
図2を用いて、第1の実施形態に係る検知装置の構成について説明する。図2は、第1の実施形態に係る検知装置の構成の一例を示す図である。図2に示すように、検知装置10は、通信部11、記憶部12、制御部13及びセンサ14を有する。
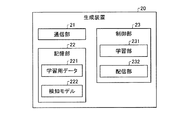
図3を用いて、第1の実施形態に係る生成装置の構成について説明する。図3は、第1の実施形態に係る生成装置の構成の一例を示す図である。図3に示すように、生成装置20は、通信部21、記憶部22及び制御部23を有する。
ここで、検知システム1の実施形態に基づく実施例について説明する。まず、図4を用いて第1の実施例について説明する。実施例では、検知システム1は、学習モードと検知モードに切り替えられるものとする。図4は、第1の実施形態に係る学習モード及び検知モードについて説明するための図である。
第2の実施例として、ウェアラブル測定器を検知装置10として機能させてもよい。この場合、ウェアラブル測定器は、センサデータとして、装着者の心電波形、心拍、筋電、体温、脈拍及び血圧等を収集する。ウェアラブル測定器は、異常を検知した場合、装着者の主治医や駆けつけサービスへ通知を行う機能を有するサーバへ通知を行う。また、第2の実施例におけるウェアラブル測定器は、衣服型のウェアラブル測定器であるhitoe(登録商標)であってもよい。
第3の実施例として、工場の生産ラインの検査装置を検知装置10として機能させてもよい。この場合、検査装置は、センサデータとして、生産ラインの映像や音声等を収集し、異常を検知した場合、生産ラインの制御装置に通知する。このとき、生産ラインの制御装置は、生産ラインの稼働を停止し不良品の生産を止めることや、特定された異常原因に基づいて自動修復アクションを実行することができる。
第4の実施例として、ネットワークの末端のルータを検知装置10として機能させてもよい。この場合、ルータは、センサデータとして、通過するパケットの量やヘッダ情報等を収集し、異常を検知した場合、コントローラサーバに通知する。このとき、コントローラサーバは、OpenFlow等を用いたルーティングの変更を行うことができる。
図5を用いて、検知装置10の処理の流れについて説明する。図5は、第1の実施形態に係る検知装置の処理の流れを示すフローチャートである。図5に示すように、まず、取得部131は、検知モデル122を取得する(ステップS101)。ここで、センサ14は、検知対象データ121を収集する(ステップS102)。
取得部131は、生成装置20によって生成されたニューラルネットによるAutoEncoderと閾値とからなる検知モデル122であって、入力データをAutoEncoderに入力して得られる出力データと入力データとの差分が閾値を超えている場合に異常と判定する検知モデル122を、生成装置20から取得する。また、センサ14は、検知対象データ121を収集する。また、検知部132は、センサ14によって収集された検知対象データ121を検知モデル122に入力し異常を検知する。このため、本実施形態によれば、計算リソースや通信環境が貧弱であっても、エッジで異常検知を行い、リアルタイムに利用者に情報提供することができる。
異常検知対象がハードウェアや生物等の経年劣化する対象物であったり、利用頻度等の状況によって順次モデルが更新されていく場合、異常が検知されなかった正常なデータとして生成装置20に提供される学習用データの分布(以降、正常分布)が変化していくことが考えられる。そして、正常分布が当初許容されない程度にまで変移した場合の学習用データを基に更新された検知モデルでは、信頼できる異常検知結果を得ることができなくなることが考えられる。
また、図示した各装置の各構成要素は機能概念的なものであり、必ずしも物理的に図示のように構成されていることを要しない。すなわち、各装置の分散・統合の具体的形態は図示のものに限られず、その全部又は一部を、各種の負荷や使用状況等に応じて、任意の単位で機能的又は物理的に分散・統合して構成することができる。さらに、各装置にて行われる各処理機能は、その全部又は任意の一部が、CPU及び当該CPUにて解析実行されるプログラムにて実現され、あるいは、ワイヤードロジックによるハードウェアとして実現され得る。
図7は、生成プログラムを実行するコンピュータの一例を示す図である。コンピュータ1000は、例えば、メモリ1010、CPU1020を有する。また、コンピュータ1000は、ハードディスクドライブインタフェース1030、ディスクドライブインタフェース1040、シリアルポートインタフェース1050、ビデオアダプタ1060、ネットワークインタフェース1070を有する。これらの各部は、バス1080によって接続される。
10 検知装置
11、21 通信部
12、22 記憶部
13、23 制御部
14 センサ
20 生成装置
30 出力装置
121 検知対象データ
122、222 検知モデル
221 学習用データ
131 取得部
132 検知部
133 通知部
134 提供部
231 学習部
232 配信部
Claims (5)
- 外部の情報処理装置によって生成されたニューラルネットによるAutoEncoderと閾値とからなる検知モデルであって、入力データを前記AutoEncoderに入力して得られる出力データと前記入力データとの差分が前記閾値を超えている場合に異常と判定する検知モデルを、前記情報処理装置から取得する取得部と、
センサと、
前記センサによって収集されたセンサデータを前記検知モデルに入力し異常を検知する検知部と、
前記検知部によって異常が検知されなかった場合、前記センサデータから一定の外れ値を除外した正常みなしデータ、又は前記センサデータから一定の割合でサンプリングしたデータを、前記検知モデルを更新するための学習用データとして前記情報処理装置に提供する提供部と、
を有し、
前記取得部は、前記情報処理装置によって生成された検知対象の初期の状態での異常を検知する検知モデルである初期モデルと、前記情報処理装置が、前記提供部によって提供された前記学習用データを用いて学習を行うことによって、前記初期モデルを更新した検知モデルである更新モデルと、を取得し、
前記検知部は、前記センサデータを、前記初期モデル及び前記更新モデルのそれぞれに入力し、検知対象において初期の状態からの許容を超える変移が発生しているという異常を検知することを特徴とする検知装置。 - 前記検知部によって異常が検知された場合、異常が検知された旨を含む情報を、前記情報を出力する機能を有する所定の装置に対して通知する通知部をさらに有することを特徴とする請求項1に記載の検知装置。
- 前記検知部は、異常を検知した場合、前記センサデータに含まれる次元ごとの異常度をさらに算出し、
前記通知部は、前記次元ごとの前記異常度の全部又は一部をさらに通知すること特徴とする請求項2に記載の検知装置。 - センサを有する検知装置によって実行される検知方法であって、
外部の情報処理装置によって生成されたニューラルネットによるAutoEncoderと閾値とからなる検知モデルであって、入力データを前記AutoEncoderに入力して得られる出力データと前記入力データとの差分が前記閾値を超えている場合に異常と判定する検知モデルを、前記情報処理装置から取得する取得工程と、
前記センサによって収集されたセンサデータを前記検知モデルに入力し異常を検知する検知工程と、
前記検知工程によって異常が検知されなかった場合、前記センサデータから一定の外れ値を除外した正常みなしデータ、又は前記センサデータから一定の割合でサンプリングしたデータを、前記検知モデルを更新するための学習用データとして前記情報処理装置に提供する提供工程と、
を有し、
前記取得工程は、前記情報処理装置によって生成された検知対象の初期の状態での異常を検知する検知モデルである初期モデルと、前記情報処理装置が、前記提供工程によって提供された前記学習用データを用いて学習を行うことによって、前記初期モデルを更新した検知モデルである更新モデルと、を取得し、
前記検知工程は、前記センサデータを、前記初期モデル及び前記更新モデルのそれぞれに入力し、検知対象において初期の状態からの許容を超える変移が発生しているという異常を検知することを特徴とする検知方法。 - コンピュータを、請求項1から3のいずれか1項に記載の検知装置として機能させるための検知プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017172473A JP6853148B2 (ja) | 2017-09-07 | 2017-09-07 | 検知装置、検知方法及び検知プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017172473A JP6853148B2 (ja) | 2017-09-07 | 2017-09-07 | 検知装置、検知方法及び検知プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019049778A JP2019049778A (ja) | 2019-03-28 |
| JP6853148B2 true JP6853148B2 (ja) | 2021-03-31 |
Family
ID=65906288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017172473A Active JP6853148B2 (ja) | 2017-09-07 | 2017-09-07 | 検知装置、検知方法及び検知プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6853148B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111742462A (zh) * | 2018-02-28 | 2020-10-02 | 罗伯特·博世有限公司 | 用于基于音频和振动的功率分配装备状况监测的系统和方法 |
| WO2019166397A1 (en) * | 2018-02-28 | 2019-09-06 | Robert Bosch Gmbh | Intelligent audio analytic apparatus (iaaa) and method for space system |
| JP7254649B2 (ja) | 2019-07-11 | 2023-04-10 | 株式会社東芝 | 学習装置、診断装置及び学習方法 |
| JP2021033842A (ja) * | 2019-08-28 | 2021-03-01 | 株式会社東芝 | 状態監視装置、方法及びプログラム |
| JP7212607B2 (ja) | 2019-09-26 | 2023-01-25 | ペンタ・セキュリティ・システムズ・インコーポレーテッド | 車両can bus信号を利用した機械学習基盤運転者異常感知方法および装置 |
| KR102346275B1 (ko) * | 2019-11-26 | 2021-12-31 | 충북대학교 산학협력단 | 오토 인코더 기법을 이용한 수출입 물동량에 대한 이상치 탐지 방법 및 이를 기록한 기록매체 |
| JP7246330B2 (ja) * | 2020-01-17 | 2023-03-27 | 株式会社日立製作所 | 監視対象データを監視する方法 |
| JP7254240B2 (ja) * | 2020-02-26 | 2023-04-07 | 三菱電機株式会社 | 推論装置、運転支援装置、推論方法、および、サーバ |
| JP2021135780A (ja) | 2020-02-27 | 2021-09-13 | 株式会社東芝 | 状態監視装置、方法及びプログラム |
| JP2022140951A (ja) * | 2021-03-15 | 2022-09-29 | オムロン株式会社 | 品質評価装置及び検査管理システム |
| JP7332654B2 (ja) | 2021-06-29 | 2023-08-23 | 株式会社かんでんエンジニアリング | 架空線損傷判定システム |
| JP2023066276A (ja) | 2021-10-28 | 2023-05-15 | 三菱重工業株式会社 | 携帯情報端末および点検支援システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5287333B2 (ja) * | 2008-02-25 | 2013-09-11 | オムロン株式会社 | 年令推定装置 |
| JP2013210945A (ja) * | 2012-03-30 | 2013-10-10 | Toshiba Corp | 波形分析装置および波形分析方法 |
| JP6044556B2 (ja) * | 2014-01-16 | 2016-12-14 | 株式会社デンソー | 学習システム、車載装置、及び、サーバ |
| JP2015184823A (ja) * | 2014-03-20 | 2015-10-22 | 株式会社東芝 | モデルパラメータ算出装置、モデルパラメータ算出方法およびコンピュータプログラム |
| JP6453086B2 (ja) * | 2015-01-30 | 2019-01-16 | 株式会社日立ハイテクノロジーズ | 稼働データ分類装置 |
| WO2016132468A1 (ja) * | 2015-02-18 | 2016-08-25 | 株式会社日立製作所 | データ評価方法および装置、故障診断方法および装置 |
| WO2017094267A1 (ja) * | 2015-12-01 | 2017-06-08 | 株式会社Preferred Networks | 異常検出システム、異常検出方法、異常検出プログラム及び学習済モデル生成方法 |
-
2017
- 2017-09-07 JP JP2017172473A patent/JP6853148B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019049778A (ja) | 2019-03-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6853148B2 (ja) | 検知装置、検知方法及び検知プログラム | |
| Huong et al. | Detecting cyberattacks using anomaly detection in industrial control systems: A federated learning approach | |
| US20210397938A1 (en) | Detection device and detection program | |
| US9915925B2 (en) | Initiated test health management system and method | |
| Zhang et al. | Distributed fault diagnosis in a class of interconnected nonlinear uncertain systems | |
| CN107480028B (zh) | 磁盘可使用的剩余时长的获取方法及装置 | |
| CN110647414A (zh) | 具有异常检测的改善的模拟功能安全 | |
| Imani Masouleh et al. | Region of attraction analysis for nonlinear vehicle lateral dynamics using sum-of-squares programming | |
| JP7283485B2 (ja) | 推定装置、推定方法、及びプログラム | |
| JP7180692B2 (ja) | 推定装置、推定方法、及びプログラム | |
| Chai et al. | Passive robust fault detection using RBF neural modeling based on set membership identification | |
| US20160093117A1 (en) | Generating Estimates of Failure Risk for a Vehicular Component | |
| JP2013196698A (ja) | システム監視 | |
| US20220222927A1 (en) | Apparatus, system, and method of generating a multi-model machine learning (ml) architecture | |
| WO2022009010A1 (en) | Model fidelity monitoring and regeneration for manufacturing process decision support | |
| WO2016084326A1 (ja) | 情報処理システム、情報処理方法、及び、記録媒体 | |
| WO2019121655A1 (en) | A probability-based detector and controller apparatus, method, computer program | |
| JP6767312B2 (ja) | 検知システム、検知方法及び検知プログラム | |
| CN108362957B (zh) | 设备故障诊断方法、装置、储存介质和电子设备 | |
| Jhun et al. | Prediction and mitigation of nonlocal cascading failures using graph neural networks | |
| US10921154B2 (en) | Monitoring a sensor array | |
| CN109343952B (zh) | 贝叶斯网络确定方法、装置、存储介质和电子设备 | |
| JP7252862B2 (ja) | 制御装置、制御システムおよび制御方法 | |
| JP7420244B2 (ja) | 学習装置、学習方法、推定装置、推定方法及びプログラム | |
| WO2020240770A1 (ja) | 学習装置、推定装置、学習方法、推定方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190823 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210309 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210311 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6853148 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |