JP6787616B1 - 制御プログラム生成装置、制御プログラム生成方法、プログラム - Google Patents
制御プログラム生成装置、制御プログラム生成方法、プログラム Download PDFInfo
- Publication number
- JP6787616B1 JP6787616B1 JP2020011386A JP2020011386A JP6787616B1 JP 6787616 B1 JP6787616 B1 JP 6787616B1 JP 2020011386 A JP2020011386 A JP 2020011386A JP 2020011386 A JP2020011386 A JP 2020011386A JP 6787616 B1 JP6787616 B1 JP 6787616B1
- Authority
- JP
- Japan
- Prior art keywords
- chart
- basic
- control program
- basic operation
- manufacturing machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 42
- 238000004519 manufacturing process Methods 0.000 claims abstract description 139
- 230000008569 process Effects 0.000 claims description 19
- 238000003860 storage Methods 0.000 claims description 19
- 238000004458 analytical method Methods 0.000 claims description 15
- 238000010438 heat treatment Methods 0.000 claims description 12
- 239000000284 extract Substances 0.000 claims description 3
- 238000010586 diagram Methods 0.000 abstract description 12
- 230000006870 function Effects 0.000 description 29
- 238000013461 design Methods 0.000 description 27
- 239000000463 material Substances 0.000 description 18
- 238000005192 partition Methods 0.000 description 16
- 238000012545 processing Methods 0.000 description 14
- 238000012790 confirmation Methods 0.000 description 12
- 238000011161 development Methods 0.000 description 9
- 238000005452 bending Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 235000013305 food Nutrition 0.000 description 3
- 238000007514 turning Methods 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000010411 cooking Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
- G05B19/056—Programming the PLC
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
- G05B19/0426—Programming the control sequence
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/4097—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by using design data to control NC machines, e.g. CAD/CAM
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q15/00—Automatic control or regulation of feed movement, cutting velocity or position of tool or work
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
- G05B19/052—Linking several PLC's
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/4093—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by part programming, e.g. entry of geometrical information as taken from a technical drawing, combining this with machining and material information to obtain control information, named part programme, for the NC machine
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/4155—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by programme execution, i.e. part programme or machine function execution, e.g. selection of a programme
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36243—Convert source, high level code to machine, object code
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36276—Program virtual, logical tools, select tool from tables
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36296—Order, select, determine, change machining sequence, order
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Mechanical Engineering (AREA)
- Geometry (AREA)
- Programmable Controllers (AREA)
- Numerical Control (AREA)
Abstract
Description
複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを生成する制御プログラム生成装置(100)であって、
前記アクチュエータの自由度毎の動作を表す基本動作を、前記基本動作を実現するためのプログラム要素と対応付けて記憶している基本動作記憶部(102)と、
前記自動製造機械の動作が複数の前記基本動作に分解されて、前記基本動作の終了と他の前記基本動作の開始とが論理演算によって関連付けられることによって、前記自動製造機械の動作が記述された動作チャート(200)を読み込む動作チャート読込部(103)と、
前記基本動作記憶部に記憶されている前記プログラム要素を、前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成部(105)と
を備え、
前記基本動作記憶部は、パラメータを設定可能な前記基本動作および前記プログラム要素を記憶可能となっており、
前記動作チャート読込部は、前記基本動作に前記パラメータが設定された前記動作チャートを読込可能となっている
ことを特徴とする。
複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを、コンピュータに生成させる制御プログラム生成方法であって、
前記自動製造機械の動作が、前記アクチュエータの自由度毎の動作を表す基本動作と、前記基本動作の終了に他の前記基本動作の開始を関連付ける論理演算とを用いて記述された動作チャート(200)を読み込む動作チャート読込工程(103)と、
前記動作チャートを解析することによって、前記動作チャートに含まれる複数の前記基本動作と、複数の前記基本動作を関連付ける論理演算とを抽出する動作チャート解析工程(104)と、
前記基本動作と、前記基本動作を実現するためのプログラム要素とが対応付けて記憶されたデータ(102)を参照することによって、前記動作チャートに記載された前記基本動作を前記プログラム要素に変換すると共に、前記プログラム要素を前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成工程(105)と
を備え、
前記動作チャート読込工程は、パラメータを設定可能な前記基本動作を有する前記動作チャートを読込可能な工程となっており、
前記制御プログラム生成工程は、前記パラメータを設定可能な前記基本動作に対しては、前記パラメータを設定可能な前記プログラム要素が対応付けて記憶された前記データを参照することによって、前記制御プログラムを生成する工程となっている
ことを特徴とする。
複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを生成する方法を、コンピュータを用いて実現するプログラムであって、
前記自動製造機械の動作が、前記アクチュエータの自由度毎の動作を表す基本動作と、前記基本動作の終了に他の前記基本動作の開始を関連付ける論理演算とを用いて記述された動作チャート(200)を読み込む動作チャート読込機能(103)と、
前記動作チャートを解析することによって、前記動作チャートに含まれる複数の前記基本動作と、複数の前記基本動作を関連付ける論理演算とを抽出する動作チャート解析機能(104)と、
前記基本動作と、前記基本動作を実現するためのプログラム要素とが対応付けて記憶されたデータ(102)を参照することによって、前記動作チャートに記載された前記基本動作を前記プログラム要素に変換すると共に、前記プログラム要素を前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成機能(105)と
を、コンピュータを用いて実現すると共に、
前記動作チャート読込機能は、パラメータを設定可能な前記基本動作を有する前記動作チャートを読込可能な機能となっており、
前記制御プログラム生成機能は、前記パラメータを設定可能な前記基本動作に対しては、前記パラメータを設定可能な前記プログラム要素が対応付けて記憶された前記データを参照することによって、前記制御プログラムを生成する機能となっている
ことを特徴とする。
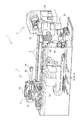
図1は、本実施例の自動製造機械1の大まかな外観形状を示した説明図である。本実施例の自動製造機械1は、長尺のパイプ材に対して自動で曲げ加工を施すことによって、所望の形状に加工する工作機械(いわゆるパイプベンダ)である。もちろん、本実施例の自動製造機械1は、複数のアクチュエータを搭載して、対象物に対して把持、搬送、加工、加熱などの複数の動作を自動で実行することができれば、パイプベンダ以外の工作機械であっても良い。例えば、食料品を自動で製造するための製造機械であっても良い。
B−1.概要 :
図3は、新たな自動製造機械1を開発するための大まかな工程を概念的に示した説明図である。図3(a)には、従来から行われてきた開発工程が示されている。また、図3(b)には、本願の発明者が提案する新たな開発工程が示されている。
図4は、YOGOチャート200の概要を説明するための説明図である。尚、YOGOチャート200の全体を表示するために縮尺すると、潰れて判読不能となってしまうので、図4ではYOGOチャート200の一部分(左上隅の部分)が表示されている。図4に示されるように、YOGOチャート200は、複数本の横線と複数本の縦線とが交差した大きな表のような形状となっている。以下では、交差する複数本の線の内、横線については「仕切線」201と称し、縦線については「トリガー線」202と称することにする。
「アクチュエータbの動作の終了」 AND 「アクチュエータcの動作の終了」
= 「アクチュエータdの動作の開始」
という論理演算によって関連付けていることになる。
図3(b)を用いて前述したように、自動製造機械1の動作をYOGOチャート200に記載しておけば、そのYOGOチャート200を専用のコンパイラに掛けることによって、制御コンピュータ50が実行可能な機械語の制御プログラムを自動で生成することができる。こうしたことが可能となるのは、次のような理由による。
図10は、本実施例の制御プログラム生成装置100が備える機能を示した説明図である。本実施例の制御プログラム生成装置100は、いわゆるパーソナルコンピュータを用いて実現することができる。
3b…チャック、 4…加工ユニット 10〜20…アクチュエータ、
10d〜20d…ドライバ回路、 50…制御コンピュータ、
100…制御プログラム生成装置、 101…YOGOチャート作成部、
102…基本動作記憶部、 103…YOGOチャート読込部、
104…YOGOチャート解析部、 105…制御プログラム生成部、
106…制御プログラム出力部、 110…コンパイラ、
200…YOGOチャート、 201…仕切線、 202…トリガー線、
203…動作線、 204…始点、 205…終点、
206…基本動作名、 209…ON確認動作、 210…スイッチ特定情報、
211…OFF確認動作。
Claims (7)
- 複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを生成する制御プログラム生成装置(100)であって、
前記アクチュエータの自由度毎の動作を表す基本動作を、前記基本動作を実現するためのプログラム要素と対応付けて記憶している基本動作記憶部(102)と、
前記自動製造機械の動作が複数の前記基本動作に分解されて、前記基本動作の終了と他の前記基本動作の開始とが論理演算によって関連付けられることによって、前記自動製造機械の動作が記述された動作チャート(200)を読み込む動作チャート読込部(103)と、
前記基本動作記憶部に記憶されている前記プログラム要素を、前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成部(105)と
を備え、
前記基本動作記憶部は、パラメータを設定可能な前記基本動作および前記プログラム要素を記憶可能となっており、
前記動作チャート読込部は、前記基本動作に前記パラメータが設定された前記動作チャートを読込可能となっている
ことを特徴とする制御プログラム生成装置。 - 請求項1に記載の制御プログラム生成装置であって、
前記基本動作記憶部は、前記基本動作に加えて、タイマによる計時動作または計数器による計数動作の少なくとも一方を、前記計時動作または前記計数動作を実現するための前記プログラム要素と対応付けて記憶しており、
前記動作チャート読込部は、前記計時動作または前記計数動作の少なくとも一方を含んだ前記動作チャートを読込可能となっている
ことを特徴とする制御プログラム生成装置。 - 請求項1または請求項2に記載の制御プログラム生成装置であって、
前記基本動作記憶部は、前記基本動作に加えて、スピーカーによる音声出力動作またはライトによる発光動作の少なくとも一方を、前記音声出力動作または前記発光動作を実現するための前記プログラム要素と対応付けて記憶しており、
前記動作チャート読込部は、前記音声出力動作または前記発光動作の少なくとも一方を含んだ前記動作チャートを読込可能となっている
ことを特徴とする制御プログラム生成装置。 - 請求項1ないし請求項3の何れか一項に記載の制御プログラム生成装置であって、
前記基本動作記憶部は、前記基本動作に加えて、ヒーターによる加熱動作を、前記加熱動作を実現するための前記プログラム要素と対応付けて記憶しており、
前記動作チャート読込部は、前記加熱動作を含んだ前記動作チャートを読込可能となっている
ことを特徴とする制御プログラム生成装置。 - 請求項1ないし請求項4の何れか一項に記載の制御プログラム生成装置であって、
前記基本動作記憶部は、
シーケンス制御によって制御される前記アクチュエータの前記基本動作に対しては、前記基本動作を前記シーケンス制御によって実現する前記プログラム要素を対応付けて記憶しており、
サーボ制御によって制御される前記アクチュエータの前記基本動作に対しては、前記基本動作を前記サーボ制御によって実現する前記プログラム要素を対応付けて記憶している
ことを特徴とする制御プログラム生成装置。 - 複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを、コンピュータに生成させる制御プログラム生成方法であって、
前記自動製造機械の動作が、前記アクチュエータの自由度毎の動作を表す基本動作と、前記基本動作の終了に他の前記基本動作の開始を関連付ける論理演算とを用いて記述された動作チャート(200)を読み込む動作チャート読込工程(103)と、
前記動作チャートを解析することによって、前記動作チャートに含まれる複数の前記基本動作と、複数の前記基本動作を関連付ける論理演算とを抽出する動作チャート解析工程(104)と、
前記基本動作と、前記基本動作を実現するためのプログラム要素とが対応付けて記憶されたデータ(102)を参照することによって、前記動作チャートに記載された前記基本動作を前記プログラム要素に変換すると共に、前記プログラム要素を前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成工程(105)と
を備え、
前記動作チャート読込工程は、パラメータを設定可能な前記基本動作を有する前記動作チャートを読込可能な工程となっており、
前記制御プログラム生成工程は、前記パラメータを設定可能な前記基本動作に対しては、前記パラメータを設定可能な前記プログラム要素が対応付けて記憶された前記データを参照することによって、前記制御プログラムを生成する工程となっている
ことを特徴とする制御プログラム生成方法。 - 複数のアクチュエータ(10〜20)を備えた自動製造機械(1)の制御プログラムを生成する方法を、コンピュータを用いて実現するプログラムであって、
前記自動製造機械の動作が、前記アクチュエータの自由度毎の動作を表す基本動作と、前記基本動作の終了に他の前記基本動作の開始を関連付ける論理演算とを用いて記述された動作チャート(200)を読み込む動作チャート読込機能(103)と、
前記動作チャートを解析することによって、前記動作チャートに含まれる複数の前記基本動作と、複数の前記基本動作を関連付ける論理演算とを抽出する動作チャート解析機能(104)と、
前記基本動作と、前記基本動作を実現するためのプログラム要素とが対応付けて記憶されたデータ(102)を参照することによって、前記動作チャートに記載された前記基本動作を前記プログラム要素に変換すると共に、前記プログラム要素を前記動作チャートに従って結合することによって、前記自動製造機械を動作させる前記制御プログラムを生成する制御プログラム生成機能(105)と
を、コンピュータを用いて実現すると共に、
前記動作チャート読込機能は、パラメータを設定可能な前記基本動作を有する前記動作チャートを読込可能な機能となっており、
前記制御プログラム生成機能は、前記パラメータを設定可能な前記基本動作に対しては、前記パラメータを設定可能な前記プログラム要素が対応付けて記憶された前記データを参照することによって、前記制御プログラムを生成する機能となっている
ことを特徴とするプログラム。
Priority Applications (26)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020011386A JP6787616B1 (ja) | 2020-01-28 | 2020-01-28 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| JP2020177114A JP7148091B2 (ja) | 2020-01-28 | 2020-10-22 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| TW109143936A TW202129443A (zh) | 2020-01-28 | 2020-12-11 | 控制程式生成裝置、控制程式生成方法、程式 |
| TW110101501A TWI859399B (zh) | 2020-01-28 | 2021-01-14 | 動作控制裝置、動作控制方法、程式 |
| TW112138804A TW202403480A (zh) | 2020-01-28 | 2021-01-14 | 控制程式生成裝置、控制程式生成方法、程式 |
| TW110101500A TW202147048A (zh) | 2020-01-28 | 2021-01-14 | 控制程式生成裝置、控制程式生成方法、程式 |
| KR1020227010539A KR102476173B1 (ko) | 2020-01-28 | 2021-01-25 | 제어 프로그램 생성 장치, 제어 프로그램 생성 방법, 프로그램 |
| PCT/JP2021/002502 WO2021153521A1 (ja) | 2020-01-28 | 2021-01-25 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| EP21747397.4A EP4099109A4 (en) | 2020-01-28 | 2021-01-25 | CONTROL PROGRAM GENERATION DEVICE, CONTROL PROGRAM GENERATION METHOD, AND PROGRAM |
| CN202180011269.8A CN115023669A (zh) | 2020-01-28 | 2021-01-25 | 控制程序生成装置、控制程序生成方法、程序 |
| PCT/JP2021/002546 WO2021153533A1 (ja) | 2020-01-28 | 2021-01-26 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| PCT/JP2021/002590 WO2021153544A1 (ja) | 2020-01-28 | 2021-01-26 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| CN202180011329.6A CN115023670A (zh) | 2020-01-28 | 2021-01-26 | 控制程序生成装置、控制程序生成方法、程序 |
| KR1020227010541A KR102476170B1 (ko) | 2020-01-28 | 2021-01-26 | 제어 프로그램 생성 장치, 제어 프로그램 생성 방법, 프로그램 |
| EP21747401.4A EP4099110A4 (en) | 2020-01-28 | 2021-01-26 | CONTROL PROGRAM GENERATING DEVICE, CONTROL PROGRAM GENERATING METHOD AND PROGRAM |
| CN202180011351.0A CN115023671A (zh) | 2020-01-28 | 2021-01-26 | 控制程序生成装置、控制程序生成方法、程序 |
| EP21747216.6A EP4099107B1 (en) | 2020-01-28 | 2021-01-26 | Control program generation device, control program generation method, and program |
| KR1020227014614A KR102476169B1 (ko) | 2020-01-28 | 2021-01-26 | 제어 프로그램 생성 장치, 제어 프로그램 생성 방법, 프로그램 |
| PCT/JP2021/002768 WO2021153591A1 (ja) | 2020-01-28 | 2021-01-27 | 動作制御装置、動作制御方法、プログラム |
| EP21747218.2A EP4099108A4 (en) | 2020-01-28 | 2021-01-27 | OPERATIONAL TAX APPARATUS, OPERATIONAL TAX METHOD AND PROGRAM |
| CN202180011396.8A CN115023672A (zh) | 2020-01-28 | 2021-01-27 | 动作控制装置、动作控制方法、程序 |
| KR1020227014615A KR102476171B1 (ko) | 2020-01-28 | 2021-01-27 | 동작 제어 장치, 동작 제어 방법, 프로그램 |
| US17/831,153 US20220291653A1 (en) | 2020-01-28 | 2022-06-02 | Control program generation apparatus, control program generation method, and program |
| US17/842,503 US20220308558A1 (en) | 2020-01-28 | 2022-06-16 | Control program generation apparatus, control program generation method, and program |
| US17/852,009 US20220326688A1 (en) | 2020-01-28 | 2022-06-28 | Control program generation apparatus, control program generation method, and program |
| US17/864,205 US20220350310A1 (en) | 2020-01-28 | 2022-07-13 | Operation control apparatus, operation control method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020011386A JP6787616B1 (ja) | 2020-01-28 | 2020-01-28 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020177114A Division JP7148091B2 (ja) | 2020-01-28 | 2020-10-22 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6787616B1 true JP6787616B1 (ja) | 2020-11-18 |
| JP2021117804A JP2021117804A (ja) | 2021-08-10 |
Family
ID=73220068
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020011386A Active JP6787616B1 (ja) | 2020-01-28 | 2020-01-28 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
| JP2020177114A Active JP7148091B2 (ja) | 2020-01-28 | 2020-10-22 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020177114A Active JP7148091B2 (ja) | 2020-01-28 | 2020-10-22 | 制御プログラム生成装置、制御プログラム生成方法、プログラム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20220291653A1 (ja) |
| EP (1) | EP4099109A4 (ja) |
| JP (2) | JP6787616B1 (ja) |
| KR (1) | KR102476173B1 (ja) |
| CN (1) | CN115023669A (ja) |
| TW (1) | TW202129443A (ja) |
| WO (1) | WO2021153521A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7037787B1 (ja) * | 2021-01-08 | 2022-03-17 | 株式会社ザイテック | シーケンサー |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102558102B1 (ko) | 2022-11-29 | 2023-07-21 | 최한수 | 사용자 설정형 자동화 공정 제어 시스템 |
| KR102589041B1 (ko) * | 2022-12-01 | 2023-10-19 | (주)연합시스템 | 디지털 트윈을 활용한 복수의 스마트 공작 기계의 가공 속도 조절 시스템, 서버, 방법 및 프로그램 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03154105A (ja) * | 1989-11-10 | 1991-07-02 | Toshiba Mach Co Ltd | Ncプログラム作成装置 |
| JPH0991335A (ja) * | 1995-09-22 | 1997-04-04 | Fuji Facom Corp | 論理回路設計支援装置 |
| JPH11202912A (ja) * | 1998-01-20 | 1999-07-30 | Takashi Nishikawa | シーケンス制御方法 |
| JP4039595B2 (ja) * | 1998-09-03 | 2008-01-30 | リコーエレメックス株式会社 | ロボットシステム |
| JP4888582B2 (ja) | 2010-05-28 | 2012-02-29 | 株式会社安川電機 | ロボット装置及び加工システム並びに加工品の製造方法 |
| WO2013099032A1 (ja) * | 2011-12-28 | 2013-07-04 | 株式会社安川電機 | モーションコントローラ及びモータ制御システム |
| KR20160075629A (ko) | 2013-10-31 | 2016-06-29 | 미쓰비시덴키 가부시키가이샤 | 프로그램 작성 장치, 프로그램 작성 방법 및 프로그램 |
| US10518409B2 (en) * | 2014-09-02 | 2019-12-31 | Mark Oleynik | Robotic manipulation methods and systems for executing a domain-specific application in an instrumented environment with electronic minimanipulation libraries |
| JP6821497B2 (ja) | 2017-04-27 | 2021-01-27 | 株式会社日立産機システム | 産業用コントローラのプログラム開発システム及び産業用コントローラのプログラム開発システムにおけるデータ共有方法 |
| JP6445084B2 (ja) | 2017-05-18 | 2018-12-26 | ファナック株式会社 | 工作機械 |
-
2020
- 2020-01-28 JP JP2020011386A patent/JP6787616B1/ja active Active
- 2020-10-22 JP JP2020177114A patent/JP7148091B2/ja active Active
- 2020-12-11 TW TW109143936A patent/TW202129443A/zh unknown
-
2021
- 2021-01-25 EP EP21747397.4A patent/EP4099109A4/en active Pending
- 2021-01-25 CN CN202180011269.8A patent/CN115023669A/zh active Pending
- 2021-01-25 WO PCT/JP2021/002502 patent/WO2021153521A1/ja unknown
- 2021-01-25 KR KR1020227010539A patent/KR102476173B1/ko active IP Right Grant
-
2022
- 2022-06-02 US US17/831,153 patent/US20220291653A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7037787B1 (ja) * | 2021-01-08 | 2022-03-17 | 株式会社ザイテック | シーケンサー |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102476173B1 (ko) | 2022-12-08 |
| JP2021117975A (ja) | 2021-08-10 |
| EP4099109A1 (en) | 2022-12-07 |
| US20220291653A1 (en) | 2022-09-15 |
| JP2021117804A (ja) | 2021-08-10 |
| JP7148091B2 (ja) | 2022-10-05 |
| WO2021153521A1 (ja) | 2021-08-05 |
| TW202129443A (zh) | 2021-08-01 |
| KR20220062544A (ko) | 2022-05-17 |
| EP4099109A4 (en) | 2024-03-27 |
| CN115023669A (zh) | 2022-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021153521A1 (ja) | 制御プログラム生成装置、制御プログラム生成方法、プログラム | |
| Zivanovic et al. | An approach for applying STEP-NC in robot machining | |
| US20220326688A1 (en) | Control program generation apparatus, control program generation method, and program | |
| JP7074378B2 (ja) | 制御プログラム生成装置、制御プログラム生成方法、プログラム | |
| WO2021153533A1 (ja) | 制御プログラム生成装置、制御プログラム生成方法、プログラム | |
| US20220350310A1 (en) | Operation control apparatus, operation control method, and program | |
| JP7114035B2 (ja) | 動作制御装置、動作制御方法、プログラム | |
| JP7114034B2 (ja) | 制御プログラム生成装置、制御プログラム生成方法、プログラム | |
| JP7523116B2 (ja) | 制御プログラム生成装置 | |
| JP2008532130A (ja) | 制御装置のインタプリタによるサブプログラムの翻訳のための方法 | |
| JP7276359B2 (ja) | 動作指令生成装置、機構制御システム、コンピュータプログラム、動作指令生成方法及び機構制御方法 | |
| JP2023104873A (ja) | 制御プログラム生成装置、制御プログラム生成方法、プログラム | |
| JPH09258808A (ja) | モーションコントローラプログラミング方式 | |
| TW202147048A (zh) | 控制程式生成裝置、控制程式生成方法、程式 | |
| JP2537418B2 (ja) | 制御プログラム作成装置 | |
| JPS6260006A (ja) | ロボツト制御プログラムの干渉チエツク方法 | |
| CN118103182A (zh) | 生成辅助文件的模拟装置以及控制系统 | |
| JP2020175474A (ja) | 動作計画装置及び動作計画方法 | |
| JPH02306305A (ja) | 制御プログラム作成方法 | |
| JPS63288685A (ja) | ロボット動作順序図出力方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200207 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200207 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201013 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201022 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6787616 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |