JP6758155B2 - プラントの診断システム及び診断方法 - Google Patents
プラントの診断システム及び診断方法 Download PDFInfo
- Publication number
- JP6758155B2 JP6758155B2 JP2016215918A JP2016215918A JP6758155B2 JP 6758155 B2 JP6758155 B2 JP 6758155B2 JP 2016215918 A JP2016215918 A JP 2016215918A JP 2016215918 A JP2016215918 A JP 2016215918A JP 6758155 B2 JP6758155 B2 JP 6758155B2
- Authority
- JP
- Japan
- Prior art keywords
- correlation
- graph
- plant
- root cause
- qualitative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Testing And Monitoring For Control Systems (AREA)
Description

13 定性モデル格納部
14 構成データ格納部
16 表示装置
18 相関変化解析部
19 相関異常グラフ作成部
20 定性グラフ作成部
21 根本原因推定部
22 対応操作情報格納部
23 対応操作情報抽出部
24 シミュレーションモデル格納部
25 シミュレーション実行部
Claims (10)
- プラントを診断する診断システムにおいて、
前記プラントの運転データとして、複数の運転パラメータの経時変化を格納する運転データ格納部と、
運転パラメータ同士の相関関係の変化を解析して、相関関係の変化が予め設定された閾値より大きい場合に相関異常と判定する相関変化解析部と、
前記相関変化解析部の解析結果に基づき、前記運転パラメータをノードで示すとともに前記相関異常をノード間のリンクで示す相関異常グラフを作成する相関異常グラフ作成部と、
前記プラントの定性モデルとして、前記プラントの正常動作に付随する運転パラメータ同士の因果関係を格納する定性モデル格納部と、
前記相関異常グラフを構成する前記運転パラメータが関与する定性モデルに基づき、前記運転パラメータをノードで示すとともに因果関係をノード間のリンクで示す定性グラフを作成する定性グラフ作成部と、
前記相関異常グラフ及び前記定性グラフを、リンクを介し相互に連結された運転パラメータの集合である島集合に分解し、前記相関異常グラフの島集合を作成するために前記定性グラフの島集合を互いに連結するリンクであって、リンクの数が最小になるとともに、リンクに対応する部品間隔が小さいものを選択し、選択したリンクが根本原因であると推定する根本原因推定部と、
前記根本原因推定部の推定結果を表示する表示装置と、を備えたことを特徴とする診断システム。 - 請求項1に記載の診断システムにおいて、
前記表示装置は、前記相関異常グラフ上、前記根本原因推定部で根本原因として推定されたリンクを他のリンクと識別可能に表示することを特徴とする診断システム。 - 請求項1に記載の診断システムにおいて、
前記プラントの構成データとして、前記プラントの構成情報及び構成画像を格納する構成データ格納部を備え、
前記根本原因推定部は、前記プラントの構成情報に基づき、前記根本原因推定部で根本原因として推定されたリンクに対応する異常発生部位を抽出しており、
前記表示装置は、前記プラントの構成画像上、前記根本原因推定部で抽出された異常発生部位を他の部位と識別可能に表示することを特徴とする診断システム。 - 請求項3に記載の診断システムにおいて、
複数の対応操作情報を格納する対応操作情報格納部と、
前記対応操作情報格納部で格納された複数の対応操作情報のうち、前記根本原因推定部で抽出された異常発生部位に対する対応操作情報を抽出する対応操作情報抽出部とを備え、
前記表示装置は、前記対応操作情報抽出部で抽出された対応操作情報を表示することを特徴とする診断システム。 - 請求項4に記載の診断システムにおいて、
前記プラントのシミュレーションモデルを格納するシミュレーションモデル格納部と、
前記プラントのシミュレーションモデルを用い、前記対応操作情報抽出部で抽出された対応操作を実行した場合を想定してシミュレーションを実行するシミュレーション実行部とを備え、
前記表示装置は、シミュレーションの結果を表示することを特徴とする診断システム。 - プラントの運転データを診断する診断方法において、
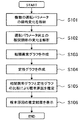
前記プラントの運転データとして、複数の運転パラメータの経時変化を格納し、
運転パラメータ同士の相関関係の変化を解析して、相関関係の変化が予め設定された閾値より大きい場合に相関異常と判定し、
前記解析結果に基づき、前記運転パラメータをノードで示すとともに前記相関異常をノード間のリンクで示す相関異常グラフを作成し、
前記相関異常グラフを構成する前記運転パラメータが関与する定性モデルに基づき、前記運転パラメータをノードで示すとともに因果関係をノード間のリンクで示す定性グラフを作成し、
前記相関異常グラフ及び前記定性グラフを、リンクを介し相互に連結された運転パラメータの集合である島集合に分解し、前記相関異常グラフの島集合を作成するために前記定性グラフの島集合を互いに連結するリンクであって、リンクの数が最小になるとともに、リンクに対応する部品間隔が小さいものを選択し、選択したリンクが根本原因であると推定し、その推定結果を表示することを特徴とする診断方法。 - 請求項6に記載の診断方法において、
前記相関異常グラフ上、根本原因として推定されたリンクを他のリンクと識別可能に表示することを特徴とする診断方法。 - 請求項6に記載の診断方法において、
前記プラントの構成情報に基づき、根本原因として推定されたリンクに対応する異常発生部位を抽出し、
前記プラントの構成画像上、前記異常発生部位を他の部位と識別可能に表示することを特徴とする診断方法。 - 請求項8に記載の診断方法において、
複数の対応操作情報のうち、前記異常発生部位に対する対応操作情報を抽出して表示することを特徴とする診断方法。 - 請求項9に記載の診断方法において、
前記プラントのシミュレーションモデルを用い、抽出された対応操作を実行した場合を想定してシミュレーションを実行し、
シミュレーションの結果を表示することを特徴とする診断方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016215918A JP6758155B2 (ja) | 2016-11-04 | 2016-11-04 | プラントの診断システム及び診断方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016215918A JP6758155B2 (ja) | 2016-11-04 | 2016-11-04 | プラントの診断システム及び診断方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018073316A JP2018073316A (ja) | 2018-05-10 |
| JP2018073316A5 JP2018073316A5 (ja) | 2019-08-15 |
| JP6758155B2 true JP6758155B2 (ja) | 2020-09-23 |
Family
ID=62115477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016215918A Active JP6758155B2 (ja) | 2016-11-04 | 2016-11-04 | プラントの診断システム及び診断方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6758155B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7127477B2 (ja) * | 2018-10-23 | 2022-08-30 | 日本製鉄株式会社 | 学習方法、装置及びプログラム、並びに設備の異常診断方法 |
| JP7153585B2 (ja) * | 2019-02-27 | 2022-10-14 | 日立Geニュークリア・エナジー株式会社 | 異常原因推定方法、および、異常原因推定装置 |
| JP7272020B2 (ja) | 2019-03-13 | 2023-05-12 | オムロン株式会社 | 表示システム |
| JP7230600B2 (ja) * | 2019-03-13 | 2023-03-01 | オムロン株式会社 | 表示システム |
| JP2022029982A (ja) * | 2020-08-06 | 2022-02-18 | オムロン株式会社 | 表示システム、表示方法、及び表示プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10320036A (ja) * | 1997-05-19 | 1998-12-04 | Toshiba Eng Co Ltd | プラント系統動作状態表示装置 |
| JP4872944B2 (ja) * | 2008-02-25 | 2012-02-08 | 日本電気株式会社 | 運用管理装置、運用管理システム、情報処理方法、及び運用管理プログラム |
| JP5427107B2 (ja) * | 2010-05-20 | 2014-02-26 | 株式会社日立製作所 | 監視診断装置および監視診断方法 |
| JP6368031B2 (ja) * | 2015-03-16 | 2018-08-01 | 株式会社日立製作所 | 異常予知・回復支援システム、異常予知・回復支援方法及び水処理システム |
-
2016
- 2016-11-04 JP JP2016215918A patent/JP6758155B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018073316A (ja) | 2018-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6758155B2 (ja) | プラントの診断システム及び診断方法 | |
| KR102153924B1 (ko) | 모델 파라미터값 추정 장치 및 추정 방법, 프로그램, 프로그램을 기록한 기록 매체, 모델 파라미터값 추정 시스템 | |
| CN106503368B (zh) | 一种基于故障机理相关的多状态系统可靠性建模方法 | |
| JP6976696B2 (ja) | プロセス管理支援装置および方法 | |
| BR122021026024B1 (pt) | Método e aparelho de processamento de dados para avaliação de uma rede de fluxo de petróleo e gás, modelos locais e seu uso, e produto de programa computacional | |
| US9436168B2 (en) | System and method for maximising thermal efficiency of a power plant | |
| Yu et al. | A probabilistic multivariate method for fault diagnosis of industrial processes | |
| CN110431499B (zh) | 用于表征系统中的一个或多个故障的方法 | |
| JP7350601B2 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| JP5048748B2 (ja) | 試験テーブル生成装置及び試験テーブル生成方法 | |
| JP2020149601A (ja) | データ処理装置、データ処理方法及びデータ処理プログラム | |
| JP6302755B2 (ja) | プラント診断用データ作成システム | |
| An et al. | Detection of process anomalies using an improved statistical learning framework | |
| JP5582487B2 (ja) | プロセスの状態予測方法 | |
| JP5125875B2 (ja) | Pidコントローラのチューニング装置、pidコントローラのチューニング用プログラムおよびpidコントローラのチューニング方法 | |
| JP2019192151A (ja) | 解析パラメータの推定方法 | |
| Tian et al. | Statistical process control for multistage processes with non-repeating cyclic profiles | |
| Carvajal et al. | Estimation of calibration intervals using Bayesian inference | |
| Shardt | Data quality assessment for closed-loop system identification and forecasting with application to soft sensors | |
| JP6554162B2 (ja) | 発電プラント性能評価方法及び発電プラント性能評価プログラム | |
| JP2007293791A (ja) | マルチバリアブル質量流量伝送器システム | |
| Shetty et al. | A hybrid prognostic model formulation and health estimation of auxiliary power units | |
| JP2011123187A (ja) | 運転模擬装置 | |
| JP2022010199A (ja) | プロセス管理支援装置および方法 | |
| JP7397623B2 (ja) | プラント状態評価装置、プラント状態評価方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190703 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190703 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200526 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200901 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6758155 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |