JP6745254B2 - 油圧ショベル - Google Patents
油圧ショベル Download PDFInfo
- Publication number
- JP6745254B2 JP6745254B2 JP2017181789A JP2017181789A JP6745254B2 JP 6745254 B2 JP6745254 B2 JP 6745254B2 JP 2017181789 A JP2017181789 A JP 2017181789A JP 2017181789 A JP2017181789 A JP 2017181789A JP 6745254 B2 JP6745254 B2 JP 6745254B2
- Authority
- JP
- Japan
- Prior art keywords
- load
- hydraulic excavator
- determination
- work
- loading
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/431—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like
- E02F3/434—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like providing automatic sequences of movements, e.g. automatic dumping or loading, automatic return-to-dig
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/10—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles having fluid weight-sensitive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/14—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing suspended loads
- G01G19/16—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing suspended loads having fluid weight-sensitive devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
Description
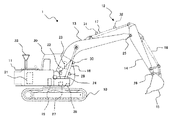
図1は本実施形態に係る油圧ショベルの側面図であり,図2は本実施形態に係るダンプトラックの側面図である。
図5は本実施形態の荷重計測システムのシステム構成図であり,コントローラ40とコントローラ21の内部にはそれぞれの機能をブロック図で示している。
ダンプトラック2側のコントローラ40は,サスペンション圧センサ39a,39b,39c,39dおよび車速センサ43の信号を入力とし,これらを基に算出した情報(例えば後述の積込判定と積込作業判定)を無線送受信機42を介してショベル側のコントローラ21に送信できるように構成されている。
図6はダンプトラック2側のコントローラ40における積込作業判定部57が,ダンプトラック2が積込作業に従事しているか否かを判定する方法を示すフローチャートであり,図7は車速センサ43の検出値と積込作業判定部57による判定結果の関係を示すグラフの一例である。
図8はダンプトラック2側のコントローラ40の積込判定部52が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かという判定する方法を示すフローチャートであり,図9は積込作業に従事しているダンプトラック2のサスペンション圧センサ39aの検出値の時間変化の一例を示すグラフである。
ステップS113で積込量Mを演算したら,積込判定部52はステップS114で油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたという判定(積込判定)をし,送受信部53は無線送受信機42を介してその判定結果(積込判定)と積込量Mを油圧ショベル1側のコントローラ21に送信し,ステップS115に進む。
図10は油圧ショベル1側のコントローラ21における運搬判定部51が,油圧ショベル1によるダンプトラック2への作業対象物の積込が行われたか否かを判定する方法を示すフローチャートであり,図11はアームボトム圧センサ31の検出値(アームシリンダボトム圧力)及びバケット角度センサ26の検出値(アーム−バケット相対角度)と運搬判定部51による判定結果の関係を示すグラフの一例である。
図12は油圧ショベル1側のコントローラ21における異常判定部58が本実施形態の荷重計測システムの異常の有無を判定する方法を示すフローチャートである。
図13は油圧ショベル1側のコントローラ21における荷重演算部50によるバケット15内の作業対象物の瞬時荷重Mlの演算方法の説明図である。本実施形態では,ブーム13の回動軸周りに作用するトルクであって,ブームシリンダ16が発生するトルクと,フロント作業機12が重力と旋回遠心力により発生するトルクと,作業対象物が重力と旋回遠心力により発生するトルクの釣合を利用して荷重を算出する。
フロント作業機12が重力により発生するトルクTgfrは,フロント作業機12の重心重量をMfr,重力加速度をg,ブーム回動軸とフロント重心までの前後方向の長さをLfrとして以下の式(3)で算出される。
フロント作業機12が旋回遠心力により発生するトルクTcfrは,旋回角速度をω,ブーム回動軸とフロント重心を結ぶ線分と水平面が成す角度をθfrとして以下の式(4)で算出される。
なお,Mfr,Lfr,θfrは予め設定されたブーム13,アーム14,バケット15のそれぞれの重心位置,重量と,ブーム角度センサ24,アーム角度センサ25,バケット角度センサ26,傾斜角度センサ28から出力される角度信号から算出される。
作業対象物が旋回遠心力により発生するトルクTclは,ブーム回動軸と作業対象物の重心を結ぶ線分と水平面が成す角度をθlとして以下の式(6)で算出される。
式(1)から(5)の釣合いを変形して作業対象物の瞬時荷重Mlに関して展開すると,瞬時荷重Mlは以下の式(7)で算出される。
(Ll・(g+ω2・sin(θl))) …(7)
式(2)から(8)による荷重の演算は,センサのノイズや油圧回路の特性などにより運搬中常に一定の値を出力できないので,油圧ショベル1が運搬動作中の所定期間に算出した瞬時荷重Mlを平均化して,作業対象物の荷重を確定する。
図14は油圧ショベル1側のコントローラ21における荷重演算部50,荷重積算可否判定部55及び荷重積算部56が実行する処理のフローチャートである。ここでは図14を用いて,荷重演算部50が運搬中のバケット内の作業対象物の荷重を確定し,荷重積算可否判定部55がその荷重を積算するか否か判定し,荷重積算部56が荷重を積算することで積載重量を出力する方法について説明する。
図15は表示装置23Aの表示画面(出力画面)の外観図である。図15を用いて本実施形態の荷重計測システムにおける荷重計測結果の表示方法と,システムに異常がある場合の積算実施指示の方法について説明する。
(1)正常判定の場合
次に上記のように構成される荷重計測システムの動作を説明する。はじめに油圧ショベル1のコントローラ21の異常判定部58で正常判定(図11:ステップS136)がされている場合について説明する。
次に油圧ショベル1のコントローラ21の異常判定部58で異常判定(図11:ステップS137)がされている場合について説明する。この場合も,油圧ショベル1の運搬動作の終了までの流れは正常判定のとき同じなので説明は省略する。
以上のように,本実施形態では,ダンプトラック2のコントローラ40(積込判定部52)と油圧ショベル1のコントローラ21(運搬判定部51)のそれぞれが油圧ショベル1からダンプトラック2に対して積込が行われたか否かを判定し,その両方の判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算可否判定部55)がバケット内の作業対象物の荷重値の積算の可否を判定し,その判定結果に基づいて油圧ショベル1のコントローラ21(荷重積算部56)が当該荷重値の積算することとした。このようにシステムを構成すると,油圧ショベル1からダンプトラック2に作業対象物が積み込まれたことが誤りなく検出されるので,ダンプトラック2への積込量(ダンプトラック2の積載重量)を正確に算出できる。
なお,本発明は,上記の実施の形態に限定されるものではなく,その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば,本発明は,上記の実施の形態で説明した全ての構成を備えるものに限定されず,その構成の一部を削除したものも含まれる。また,ある実施の形態に係る構成の一部を,他の実施の形態に係る構成に追加又は置換することが可能である。
Claims (6)
- 油圧ポンプから吐出される圧油によって駆動される油圧シリンダと、前記油圧シリンダによって駆動される作業機と、前記作業機により運搬機械に積み込まれた作業対象物の積載重量を演算するコントローラとを備えた油圧ショベルにおいて、
前記コントローラは、
前記作業機の姿勢に基づいて前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第1の判定を行い、
前記油圧シリンダの推力と前記第1の判定の判定結果とに基づいて前記油圧ショベルにより前記運搬機械へ積込まれた作業対象物の荷重である第1の荷重を演算し、
前記運搬機械に備えられた運搬機械側コントローラから送信された前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたか否かを判定する第2の判定の判定結果と前記第1の判定の判定結果とに基づいて前記第1の荷重を積算するか否かを判定する第3の判定を行い、
前記第3の判定により前記第1の荷重を積算すると判定された場合に前記第1の荷重を積算することで前記運搬機械の積載重量を演算すること
を特徴とする油圧ショベル。 - 請求項1の油圧ショベルにおいて、
前記コントローラは、前記第1の判定により前記運搬機械への作業対象物の積込が行われたと判定された時から所定時間内に、前記第2の判定により前記運搬機械への作業対象物の積込が行われたという判定結果を前記運搬機械側コントローラから受信した場合、前記第1の荷重を積算すること
を特徴とする油圧ショベル。 - 請求項1の油圧ショベルにおいて、
前記コントローラは、
前記作業機の姿勢に基づいて、前記運搬機械に対する前記油圧ショベルの運搬動作の開始と終了を判定する第4の判定を行い、
前記第4の判定により前記運搬動作の開始から終了までの間の前記油圧シリンダの推力に基づいて前記第1の荷重を演算し、
前記第4の判定により前記運搬動作が終了したと判定され、かつ、前記第2の判定により前記油圧ショベルによる前記運搬機械への作業対象物の積込が行われたと判定されたという判定結果を前記運搬機械側コントローラから受信した場合、前記第1の荷重を積算すること
を特徴とする油圧ショベル。 - 請求項1の油圧ショベルにおいて、
操作者からの指示を入力するための入力装置と、所定の情報を表示するための表示装置とをさらに有し、
前記コントローラは、
前記運搬機械側コントローラから送信される前記運搬機械に積み込まれた作業対象物の重量に基づいて前記運搬機械の異常の有無を判定する第5の判定を行い、
前記第5の判定により前記運搬機械に異常が有ると判定した場合、前記表示装置を介して前記異常の発生を報知し、前記運搬機械への作業対象物の積込が行われたことが前記入力装置を介して入力された場合に前記第1の荷重を積算すること
を特徴とする油圧ショベル。 - 請求項1の油圧ショベルにおいて、
操作者からの指示を入力するための入力装置と、所定の情報を表示するための表示装置とをさらに有し、
前記コントローラは、
前記運搬機械側コントローラで演算された前記油圧ショベルにより前記運搬機械へ積込まれた作業対象物の荷重である第2の荷重と前記第1の荷重との差分が所定値を越える場合、前記油圧ショベルと前記運搬機械のいずれかに異常が有ると判定し、
前記油圧ショベルと前記運搬機械のいずれかに異常が有ると判定した場合、前記表示装置を介して前記異常の発生を報知し、前記運搬機械への作業対象物の積込が行われたことが前記入力装置を介して入力された場合に前記第1の荷重を積算すること
を特徴とする油圧ショベル。 - 請求項1の油圧ショベルにおいて、
前記コントローラは、前記運搬機械から送信される、前記運搬機械の走行速度に基づいて前記運搬機械が前記油圧ショベルによる作業対象物の積込作業に従事しているか否かを判定する第6の判定を行い、前記第6の判定結果が切り替わった場合に、前記作業対象物の荷重の積算値をリセットすること
を特徴とする油圧ショベル。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017181789A JP6745254B2 (ja) | 2017-09-21 | 2017-09-21 | 油圧ショベル |
| PCT/JP2018/035212 WO2019059383A1 (ja) | 2017-09-21 | 2018-09-21 | 油圧ショベル |
| US16/493,010 US11454005B2 (en) | 2017-09-21 | 2018-09-21 | Hydraulic excavator |
| CN201880013791.8A CN110382789B (zh) | 2017-09-21 | 2018-09-21 | 液压挖掘机 |
| EP18858189.6A EP3686357A4 (en) | 2017-09-21 | 2018-09-21 | EXCAVATOR |
| KR1020197025128A KR102234963B1 (ko) | 2017-09-21 | 2018-09-21 | 유압 셔블 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017181789A JP6745254B2 (ja) | 2017-09-21 | 2017-09-21 | 油圧ショベル |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019056246A JP2019056246A (ja) | 2019-04-11 |
| JP2019056246A5 JP2019056246A5 (ja) | 2020-03-12 |
| JP6745254B2 true JP6745254B2 (ja) | 2020-08-26 |
Family
ID=65811383
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017181789A Active JP6745254B2 (ja) | 2017-09-21 | 2017-09-21 | 油圧ショベル |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11454005B2 (ja) |
| EP (1) | EP3686357A4 (ja) |
| JP (1) | JP6745254B2 (ja) |
| KR (1) | KR102234963B1 (ja) |
| CN (1) | CN110382789B (ja) |
| WO (1) | WO2019059383A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018160965A1 (en) * | 2017-03-03 | 2018-09-07 | Cnh Industrial America Llc | System and method for estimating implement load weights for a work vehicle |
| JP6868938B2 (ja) * | 2017-08-24 | 2021-05-12 | 日立建機株式会社 | 建設機械の荷重計測システム |
| US11498785B2 (en) * | 2019-01-30 | 2022-11-15 | Caterpillar Inc. | System and method of automated clean out of carryback in surface haulage |
| JP7253949B2 (ja) * | 2019-03-25 | 2023-04-07 | 株式会社小松製作所 | 作業機械、システムおよび作業機械の制御方法 |
| JP7300408B2 (ja) * | 2020-02-21 | 2023-06-29 | 日立建機株式会社 | 作業機械および制御システム |
| CN113654630A (zh) * | 2021-07-30 | 2021-11-16 | 深圳市中金岭南有色金属股份有限公司凡口铅锌矿 | 矿物重量测量方法、装置、设备及存储介质 |
| CN113982060A (zh) * | 2021-11-12 | 2022-01-28 | 博雷顿科技有限公司 | 一种电动装载机双电机控制系统及方法 |
| JP2023141281A (ja) * | 2022-03-23 | 2023-10-05 | 日立建機株式会社 | 作業機械 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2982584A (en) | 1983-06-17 | 1984-12-20 | Prgromet, L.S. | Excavator bucket load weigher |
| JPH0610378A (ja) | 1992-06-26 | 1994-01-18 | Komatsu Ltd | 掘削積込機の作業量検出装置 |
| US5528498A (en) * | 1994-06-20 | 1996-06-18 | Caterpillar Inc. | Laser referenced swing sensor |
| JPH1037254A (ja) * | 1996-07-29 | 1998-02-10 | Shin Caterpillar Mitsubishi Ltd | 作業機械における負荷重量計測装置 |
| US6157889A (en) * | 1999-09-16 | 2000-12-05 | Modular Mining Systems, Inc. | Load distribution system for haulage trucks |
| JP3787046B2 (ja) | 1999-09-17 | 2006-06-21 | 日立建機株式会社 | 油圧ショベルの作業量モニタ装置 |
| JP3830151B2 (ja) * | 2001-10-18 | 2006-10-04 | 日立建機株式会社 | 油圧ショベルの作業量検出装置及び作業量検出方法並びに作業量検出結果表示装置 |
| JP2008240461A (ja) * | 2007-03-28 | 2008-10-09 | Komatsu Ltd | 過積載防止システムおよび過積載防止方法 |
| US8156048B2 (en) * | 2008-03-07 | 2012-04-10 | Caterpillar Inc. | Adaptive payload monitoring system |
| US20120290178A1 (en) * | 2010-01-22 | 2012-11-15 | Hideaki Suzuki | Loading guide system |
| JP2012036645A (ja) * | 2010-08-06 | 2012-02-23 | Ohbayashi Corp | 積込量管理システム及び積込量管理方法 |
| US8833861B2 (en) | 2010-12-03 | 2014-09-16 | Caterpillar Inc. | Loading analysis system and method |
| CN103443837A (zh) * | 2011-03-31 | 2013-12-11 | 日立建机株式会社 | 搬运机械的位置调整支援系统 |
| JP2012215495A (ja) * | 2011-04-01 | 2012-11-08 | Hitachi Constr Mach Co Ltd | 荷重計測装置 |
| JP5230851B1 (ja) * | 2011-11-04 | 2013-07-10 | 株式会社小松製作所 | 積載システム及び運搬機 |
| JP2015040422A (ja) * | 2013-08-22 | 2015-03-02 | 日立建機株式会社 | 建設機械の表示装置 |
| WO2017033769A1 (ja) * | 2015-08-24 | 2017-03-02 | 株式会社小松製作所 | ホイールローダの制御システム、その制御方法およびホイールローダの制御方法 |
| US9714497B2 (en) * | 2015-10-21 | 2017-07-25 | Caterpillar Inc. | Control system and method for operating a machine |
| US10234368B2 (en) * | 2016-10-13 | 2019-03-19 | Deere & Company | System and method for load evaluation |
| US20180179732A1 (en) * | 2016-12-22 | 2018-06-28 | Caterpillar Inc. | Realtime payload mapping for loader/hauler system optimization |
-
2017
- 2017-09-21 JP JP2017181789A patent/JP6745254B2/ja active Active
-
2018
- 2018-09-21 EP EP18858189.6A patent/EP3686357A4/en active Pending
- 2018-09-21 KR KR1020197025128A patent/KR102234963B1/ko active IP Right Grant
- 2018-09-21 CN CN201880013791.8A patent/CN110382789B/zh active Active
- 2018-09-21 WO PCT/JP2018/035212 patent/WO2019059383A1/ja unknown
- 2018-09-21 US US16/493,010 patent/US11454005B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019059383A1 (ja) | 2019-03-28 |
| EP3686357A4 (en) | 2021-06-30 |
| US20200115888A1 (en) | 2020-04-16 |
| KR20190112075A (ko) | 2019-10-02 |
| KR102234963B1 (ko) | 2021-04-01 |
| EP3686357A1 (en) | 2020-07-29 |
| CN110382789B (zh) | 2021-08-31 |
| CN110382789A (zh) | 2019-10-25 |
| US11454005B2 (en) | 2022-09-27 |
| JP2019056246A (ja) | 2019-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6745254B2 (ja) | 油圧ショベル | |
| JP6849623B2 (ja) | 作業機械 | |
| JP6807293B2 (ja) | 作業機械 | |
| CN111094661B (zh) | 作业机械 | |
| JP5406223B2 (ja) | 適応型ペイロード監視システム | |
| JP2018048548A (ja) | 輸送手段の荷積みにおいてショベル操縦者を補助する方法および補助システム | |
| US8948977B2 (en) | Systems and methods for machine implement control | |
| US11242669B2 (en) | Systems and methods for controlling machine ground pressure and tipping | |
| KR102562017B1 (ko) | 작업 기계 | |
| JP6704375B2 (ja) | 積載量補正システム | |
| JP2018145754A (ja) | 作業機械の荷重計測装置 | |
| JP6887401B2 (ja) | 作業機械 | |
| JP2021050551A (ja) | 作業機械 | |
| CN114423905B (zh) | 工程机械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200728 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6745254 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |