JP6728046B2 - カテーテル及びハンドルアセンブリ、システム、並びに方法 - Google Patents
カテーテル及びハンドルアセンブリ、システム、並びに方法 Download PDFInfo
- Publication number
- JP6728046B2 JP6728046B2 JP2016538675A JP2016538675A JP6728046B2 JP 6728046 B2 JP6728046 B2 JP 6728046B2 JP 2016538675 A JP2016538675 A JP 2016538675A JP 2016538675 A JP2016538675 A JP 2016538675A JP 6728046 B2 JP6728046 B2 JP 6728046B2
- Authority
- JP
- Japan
- Prior art keywords
- assembly
- catheter
- handle
- ablation
- delivery device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 81
- 238000002679 ablation Methods 0.000 claims description 212
- 230000008878 coupling Effects 0.000 claims description 65
- 238000010168 coupling process Methods 0.000 claims description 65
- 238000005859 coupling reaction Methods 0.000 claims description 65
- 239000002826 coolant Substances 0.000 claims description 57
- 230000033001 locomotion Effects 0.000 claims description 29
- 238000012800 visualization Methods 0.000 claims description 22
- 239000012530 fluid Substances 0.000 claims description 20
- 230000007246 mechanism Effects 0.000 claims description 20
- 210000004072 lung Anatomy 0.000 claims description 17
- 230000003287 optical effect Effects 0.000 claims description 17
- 239000003550 marker Substances 0.000 claims description 7
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 claims description 2
- 229910001000 nickel titanium Inorganic materials 0.000 claims description 2
- 238000011282 treatment Methods 0.000 description 48
- 210000001519 tissue Anatomy 0.000 description 27
- 230000002685 pulmonary effect Effects 0.000 description 22
- 208000019693 Lung disease Diseases 0.000 description 16
- 238000001816 cooling Methods 0.000 description 16
- 230000000712 assembly Effects 0.000 description 13
- 238000000429 assembly Methods 0.000 description 13
- 210000000621 bronchi Anatomy 0.000 description 10
- 230000006378 damage Effects 0.000 description 10
- 208000027418 Wounds and injury Diseases 0.000 description 9
- 230000000007 visual effect Effects 0.000 description 9
- 208000006673 asthma Diseases 0.000 description 8
- 206010052428 Wound Diseases 0.000 description 7
- 230000002638 denervation Effects 0.000 description 7
- 238000007689 inspection Methods 0.000 description 7
- 230000036961 partial effect Effects 0.000 description 7
- 208000006545 Chronic Obstructive Pulmonary Disease Diseases 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 6
- 210000002345 respiratory system Anatomy 0.000 description 6
- 208000000059 Dyspnea Diseases 0.000 description 5
- 206010013975 Dyspnoeas Diseases 0.000 description 5
- 230000008602 contraction Effects 0.000 description 5
- 210000004907 gland Anatomy 0.000 description 5
- 230000000670 limiting effect Effects 0.000 description 5
- 210000005036 nerve Anatomy 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 208000000884 Airway Obstruction Diseases 0.000 description 4
- 206010061218 Inflammation Diseases 0.000 description 4
- 210000005091 airway smooth muscle Anatomy 0.000 description 4
- 230000010339 dilation Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000004054 inflammatory process Effects 0.000 description 4
- 210000003097 mucus Anatomy 0.000 description 4
- 208000024891 symptom Diseases 0.000 description 4
- 238000003466 welding Methods 0.000 description 4
- 238000004026 adhesive bonding Methods 0.000 description 3
- 210000003169 central nervous system Anatomy 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 239000003814 drug Substances 0.000 description 3
- 239000000835 fiber Substances 0.000 description 3
- 229940088597 hormone Drugs 0.000 description 3
- 239000005556 hormone Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 210000000653 nervous system Anatomy 0.000 description 3
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000007789 sealing Methods 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 230000009885 systemic effect Effects 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 206010006458 Bronchitis chronic Diseases 0.000 description 2
- 206010011224 Cough Diseases 0.000 description 2
- 102000004127 Cytokines Human genes 0.000 description 2
- 108090000695 Cytokines Proteins 0.000 description 2
- 206010014561 Emphysema Diseases 0.000 description 2
- 206010020880 Hypertrophy Diseases 0.000 description 2
- 206010030113 Oedema Diseases 0.000 description 2
- 208000037656 Respiratory Sounds Diseases 0.000 description 2
- 206010047924 Wheezing Diseases 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical group [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 238000009530 blood pressure measurement Methods 0.000 description 2
- 206010006451 bronchitis Diseases 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 208000007451 chronic bronchitis Diseases 0.000 description 2
- 230000001684 chronic effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- JYGXADMDTFJGBT-VWUMJDOOSA-N hydrocortisone Chemical compound O=C1CC[C@]2(C)[C@H]3[C@@H](O)C[C@](C)([C@@](CC4)(O)C(=O)CO)[C@@H]4[C@@H]3CCC2=C1 JYGXADMDTFJGBT-VWUMJDOOSA-N 0.000 description 2
- 230000002757 inflammatory effect Effects 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000000420 mucociliary effect Effects 0.000 description 2
- 230000003843 mucus production Effects 0.000 description 2
- 239000002581 neurotoxin Substances 0.000 description 2
- 231100000618 neurotoxin Toxicity 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000000241 respiratory effect Effects 0.000 description 2
- 208000013220 shortness of breath Diseases 0.000 description 2
- 239000000779 smoke Substances 0.000 description 2
- 230000029547 smooth muscle hypertrophy Effects 0.000 description 2
- 210000000329 smooth muscle myocyte Anatomy 0.000 description 2
- 238000011477 surgical intervention Methods 0.000 description 2
- ZFXYFBGIUFBOJW-UHFFFAOYSA-N theophylline Chemical compound O=C1N(C)C(=O)N(C)C2=C1NC=N2 ZFXYFBGIUFBOJW-UHFFFAOYSA-N 0.000 description 2
- 238000002560 therapeutic procedure Methods 0.000 description 2
- 230000008719 thickening Effects 0.000 description 2
- UCTWMZQNUQWSLP-VIFPVBQESA-N (R)-adrenaline Chemical compound CNC[C@H](O)C1=CC=C(O)C(O)=C1 UCTWMZQNUQWSLP-VIFPVBQESA-N 0.000 description 1
- 229930182837 (R)-adrenaline Natural products 0.000 description 1
- 206010003497 Asphyxia Diseases 0.000 description 1
- 206010008589 Choking Diseases 0.000 description 1
- 206010020751 Hypersensitivity Diseases 0.000 description 1
- 101710138657 Neurotoxin Proteins 0.000 description 1
- 241000208125 Nicotiana Species 0.000 description 1
- 235000002637 Nicotiana tabacum Nutrition 0.000 description 1
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 208000037883 airway inflammation Diseases 0.000 description 1
- 239000013566 allergen Substances 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000004873 anchoring Methods 0.000 description 1
- 239000003242 anti bacterial agent Substances 0.000 description 1
- 229940088710 antibiotic agent Drugs 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 229940124630 bronchodilator Drugs 0.000 description 1
- 239000000168 bronchodilator agent Substances 0.000 description 1
- 229940082638 cardiac stimulant phosphodiesterase inhibitors Drugs 0.000 description 1
- 210000000845 cartilage Anatomy 0.000 description 1
- 239000013626 chemical specie Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000002939 deleterious effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010017 direct printing Methods 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 238000012377 drug delivery Methods 0.000 description 1
- 230000004064 dysfunction Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229960005139 epinephrine Drugs 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 229960000890 hydrocortisone Drugs 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 210000004969 inflammatory cell Anatomy 0.000 description 1
- 230000004941 influx Effects 0.000 description 1
- 238000001802 infusion Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 231100000897 loss of orientation Toxicity 0.000 description 1
- 230000004199 lung function Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- VEVKLOLYYQLRRV-UHFFFAOYSA-N moretenone Natural products C12CCC3C4(C)CCC(=O)C(C)(C)C4CCC3(C)C1(C)CCC1C2(C)CCC1C(=C)C VEVKLOLYYQLRRV-UHFFFAOYSA-N 0.000 description 1
- 210000000944 nerve tissue Anatomy 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000002640 oxygen therapy Methods 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- 238000011458 pharmacological treatment Methods 0.000 description 1
- 239000002571 phosphodiesterase inhibitor Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000004886 process control Methods 0.000 description 1
- 230000009325 pulmonary function Effects 0.000 description 1
- 238000007674 radiofrequency ablation Methods 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000003229 sclerosing agent Substances 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 210000002460 smooth muscle Anatomy 0.000 description 1
- 230000016160 smooth muscle contraction Effects 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 150000003431 steroids Chemical class 0.000 description 1
- 239000000021 stimulant Substances 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 229960000278 theophylline Drugs 0.000 description 1
- 230000000451 tissue damage Effects 0.000 description 1
- 231100000827 tissue damage Toxicity 0.000 description 1
- 210000001186 vagus nerve Anatomy 0.000 description 1
- 230000001755 vocal effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00025—Operational features of endoscopes characterised by power management
- A61B1/00027—Operational features of endoscopes characterised by power management characterised by power supply
- A61B1/00032—Operational features of endoscopes characterised by power management characterised by power supply internally powered
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/0011—Manufacturing of endoscope parts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00114—Electrical cables in or with an endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00121—Connectors, fasteners and adapters, e.g. on the endoscope handle
- A61B1/00128—Connectors, fasteners and adapters, e.g. on the endoscope handle mechanical, e.g. for tubes or pipes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00133—Drive units for endoscopic tools inserted through or with the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
- A61B1/2676—Bronchoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/24—Surgical instruments, devices or methods, e.g. tourniquets for use in the oral cavity, larynx, bronchial passages or nose; Tongue scrapers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/1815—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/24—Surgical instruments, devices or methods, e.g. tourniquets for use in the oral cavity, larynx, bronchial passages or nose; Tongue scrapers
- A61B2017/242—Surgical instruments, devices or methods, e.g. tourniquets for use in the oral cavity, larynx, bronchial passages or nose; Tongue scrapers for bronchial passages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00023—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids closed, i.e. without wound contact by the fluid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/0022—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/00267—Expandable means emitting energy, e.g. by elements carried thereon having a basket shaped structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00434—Neural system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00541—Lung or bronchi
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
- A61B2018/00821—Temperature measured by a thermocouple
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00982—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combined with or comprising means for visual or photographic inspections inside the body, e.g. endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00988—Means for storing information, e.g. calibration constants, or for preventing excessive use, e.g. usage, service life counter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/067—Measuring instruments not otherwise provided for for measuring angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Otolaryngology (AREA)
- Pulmonology (AREA)
- Physiology (AREA)
- Cardiology (AREA)
- Plasma & Fusion (AREA)
- Mechanical Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Surgical Instruments (AREA)
- Radiation-Therapy Devices (AREA)
Description
本出願は、参照によりその全内容が本明細書に組み入れられる2013年12月12日出願の米国仮特許出願第61/915,282号の利益を主張する。
本発明は、一般に、組織を処置するためのシステム、器具、及び方法に関し、より詳細には、本発明は、気道、管腔、又は脈管内に配置されたカテーテルの遠位端部の円周方向及び軸方向の両方の位置決めを容易にするカテーテル位置決めハンドルアセンブリを含むカテーテル及びハンドルシステムに関する。
肺疾患は、米国のみで何千万人もが罹患する最も一般的な病状のうちの一部である。肺疾患は、適切な呼吸を妨げる気道の問題から生じる。これらの疾患の多くは、適切な肺機能を回復して患者の生活の質全体を改善するために医学的な注意又は介入を必要とする。より一般的な肺疾患の一部として、喘息及び慢性閉塞性肺疾患又はCOPDが挙げられる。COPD及び喘息のような肺疾患の症状は、様々であるが、多くの場合、持続性の咳、息切れ、喘鳴、胸部圧迫、及び息苦しさ(breathlessness)が含まれる。一般に、これらの症状は、やや激しい運動、例えば、ランニング、ジョギング、早歩きなどを行うときに悪化する。しかしながら、これらの症状は、この疾患が検査されずに進行すると、激しくない運動を行うときに気づくであろう。特に医学的な注意が払われずに過ごすと、その人の日常生活に著しい支障を来し、従って生活の質全体が低下する。
本発明の実施形態は、カテーテルアセンブリ、ハンドルアセンブリ、並びに該ハンドルアセンブリ及びカテーテルアセンブリを送達装置、例えば、気管支鏡に結合するための検査鏡結合アセンブリを含む肺処置カテーテル及びハンドルシステムに関する。実施形態は、さらにキットにも関し、該キットは、検査鏡結合アセンブリを介して互いに、そして送達装置、例えば、気管支鏡に結合するためのカテーテルアセンブリ及びハンドルアセンブリ、並びにこのようなアセンブリを使用する方法の使用説明書を含む。カテーテルアセンブリは、冷却剤供給部及び戻りリザーバー、並びにエネルギー供給部、例えば、RF発生器を含むシステムコンソールにハンドルアセンブリを介してさらに流体結合及び電気結合される。
添付の図面と共に本発明の様々な実施形態の以下の詳細な説明から、本発明をより完全に理解できよう。
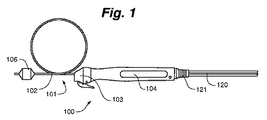
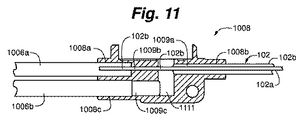
図1及び図2に例示されているように、本発明の一実施形態によるカテーテル及びハンドルシステム100は、細長いシャフト102及びシャフト102の第1又は遠位端部に結合されたアブレーションアセンブリ106を有するアブレーションカテーテルアセンブリ101、シャフト102の第2又は近位端部に結合された位置決めハンドルアセンブリ104、並びにカテーテルアセンブリ101及びハンドルアセンブリ104を送達装置、例えば、気管支鏡の作業チャネルに結合するための検査鏡結合アセンブリ103を含み得る。カテーテルアセンブリ101は、ハンドルアセンブリ104を介してシステムコンソール(不図示)にさらに流体的かつ電気的に結合され、冷却剤の供給及び戻りリザーバー、及びエネルギー供給部、例えば、RF発生器を備えている。ハンドルアセンブリ104は、処置を行う間にシャフト102の遠位部分又は端部、従って、アブレーションアセンブリ106を軸方向及び円周方向に操作するように構成されている。
「気管支樹を処置するためのシステム、アセンブリ、及び方法(Systems, Assemblies, and Method for Treating a Bronchial Tree)」という名称の米国特許第8,088,127号;
「冷却可能なエネルギー放射アセンブリを備えた送達装置(Delivery Devices with Coolable Energy Emitting Assemblies)」という名称の米国特許出願公開第2011/0152955号;
「組織を処置し、狭窄を制御するためのシステム、器具、及び方法(Systems, Apparatus, and Methods for Treating Tissue and Controlling Stenosis)」という名称の米国特許出願公開第2012/0310233号;
「除神経を行うための非侵襲性及び低侵襲性除神経の方法及びシステム(Non-invasive and Minimally Invasive Denervation Methods and Systems for Performing the Same)」という名称の米国特許出願公開第2011/0118725号;
「対象をスクリーニングするための方法及びシステム(Methods and Systems for Screening Subjects)」という名称の米国特許出願公開第2012/0302909号;
「肺の処置のためのシステム及び方法(System and Method for Pulmonary Treatment)」という名称の米国特許出願公開第2011/0301587号;
「神経毒を用いて喘息を処置するための器具(Apparatus for Treating Asthma Using a Neurotoxin)」という名称の米国特許第8,172,827号;
「少なくとも1つの気道の狭窄を制御するための方法及び装置(Method and Apparatus for Controlling Narrowing of at Least One Airway)」という名称の米国特許出願公開第号;
「気管支拡張のためのシステム及び方法(System and Method for Bronchial Dilation)」という名称の米国特許第8,483,831号;
「神経組織を傷害させるための器具及び方法(Apparatuses and Methods for Injuring Nerve Tissue)」という名称の国際公開第2013/052501号;
「肺機能を改善させるための小型の肺処置実施システム及び方法(Compact Delivery Pulmonary Treatment System and Method for Improving Pulmonary Function)」という名称の米国特許出願公開第2013/0310822号;
「薬効を改善するための方法(Methods for Improving Drug Efficacy)」という名称の米国仮特許出願第61/746,460号;
「処置のための流体送達システム及び方法(Fluid Delivery System and Method for Treatment)」という名称の米国仮特許出願第61/779,371号;
「超音波エネルギーで肺疾患を処置するためのシステム、装置、及び方法(Systems, Devices, and Methods for Treating a Pulmonary Disease with Ultrasound Energy)」という名称の米国仮特許出願第61/876,925号;
「肺の処置手順中に食道を保護するための方法(Methods for Protecting the Esophagus During Pulmonary Treatment Procedures)」という名称の米国仮特許出願第61/847,477号;及び
共に「薬剤で肺障害を処置するためのシステム、装置、及び方法(Systems, Devices, and Methods for Treating a Pulmonary Disorder with an Agent)」という名称の米国仮特許出願第61/799,742号及び同第61/870,373号。
本件出願は、以下の構成の発明を提供する。
(構成1)
送達装置に結合するためのカテーテル及びハンドルアセンブリであって、該送達装置が、近位作業ポート、遠位作業端部、及び該作業ポートと該作業端部との間に延在し、作業長さを画定する作業チャネルを備え、該アセンブリが:
カテーテルアセンブリであって、
細長いシャフト、
該細長いシャフトの第1の端部に結合された、エネルギー放射装置を備えるアブレーションアセンブリを含む、該カテーテルアセンブリ;
該細長いシャフトの第2の端部に結合されたハンドルアセンブリであって、
ハンドルフレーム及び制御部を備え、該制御部が、該ハンドルフレームに対して移動可能であり、かつ該制御部の移動により、該アブレーションアセンブリが該ハンドルフレームに対して軸方向及び円周方向の少なくとも一方に移動するように、該細長いシャフトに結合されている、該ハンドルアセンブリ;及び
該ハンドルアセンブリ及び該送達装置の該作業ポートに結合するように構成された結合アセンブリであって、該制御部が移動して該アブレーションアセンブリを移動させる間に、該送達装置及び該ハンドルフレームに対する固定を維持するように構成され、該ハンドルアセンブリが該結合アセンブリを介して該送達装置に動作可能に結合されると、該細長いシャフトの第1の部分が、該送達装置の該作業チャネル内部に、及び通過して延在する、該結合アセンブリを含む、前記アセンブリ。
(構成2)
前記制御部が移動すると、前記細長いシャフト及び前記アブレーションアセンブリの両方が前記送達装置に対して移動する、構成1記載のアセンブリ。
(構成3)
前記結合アセンブリが、前記ハンドルアセンブリを前記送達装置の前記ポートに固定するためのカップラー及びロック機構を含む、構成1〜2のいずれか一項記載のアセンブリ。
(構成4)
前記制御部が、前記アブレーションアセンブリの前記送達装置に対する軸方向及び円周方向の操作用に構成されている、構成1記載のアセンブリ。
(構成5)
前記制御部が、前記ハンドルフレームの長手方向軸を中心に円周方向に回転して前記アブレーションアセンブリを円周方向に回転させるように構成された本体を備える、構成1〜4のいずれか一項記載のアセンブリ。
(構成6)
前記本体が、一円周方向に回転すると、前記アブレーションアセンブリが同じ円周方向に回転する、構成5記載のアセンブリ。
(構成7)
前記本体が、前記ハンドルフレームに回転可能に結合されたハンドルハウジングを備える、構成5記載のアセンブリ。
(構成8)
前記制御部が、軸方向の操作のために前記ハンドルの長手方向軸に沿って軸方向に移動するように構成された本体を備える、構成1〜7のいずれか一項記載のアセンブリ。
(構成9)
軸方向の操作用の前記制御部が、前記ハンドルの前記長手方向軸に沿って軸方向に移動するように構成された本体を備え、該本体が一軸方向に移動すると、前記シャフト及び前記アブレーションアセンブリが同じ軸方向に移動する、構成8記載のアセンブリ。
(構成10)
前記制御部が、前記ハンドルフレームに対して閉じた又は引き込まれた状態と延出した状態との間で変化可能であり、該制御部の変化により、前記アブレーションアセンブリが、前記ハンドルフレームに対して軸方向に移動するように、該制御部が前記細長いシャフトに結合され、かつ
前記カテーテルアセンブリの前記細長いシャフトが、前記制御部が前記引き込まれた状態及び前記延出した状態の一方にあるときに前記送達装置の前記作業長さと同等以上のカテーテル呼び長さを有する、構成1〜9のいずれか一項記載のアセンブリ。
(構成11)
前記カテーテル呼び長さが、前記送達装置の前記作業端部に結合された又は前記作業端部と一体の視覚化装置との前記アブレーションアセンブリの光学的結合を可能にする、構成10記載のアセンブリ。
(構成12)
前記制御部が、前記アブレーションアセンブリの少なくとも一部が前記作業チャネル内に引き込まれるように少なくとも部分的に延出した状態に変化可能である、構成10記載のアセンブリ。
(構成13)
前記アブレーションアセンブリの全体が、前記制御部が前記延出した状態にあるときに前記作業チャネル内に引き込まれる、構成12記載のアセンブリ。
(構成14)
前記アブレーションアセンブリが、前記制御部が引き込まれた状態にあるときに、前記送達装置の前記作業端部から約0.1〜約4.0cmの距離を延出する、構成10記載のアセンブリ。
(構成15)
前記制御部が前記引き込まれた状態と前記延出した状態との間で変化するときの前記アブレーションアセンブリの全移動距離が、該アブレーションアセンブリの長手方向の長さと同等以上である、構成10記載のアセンブリ。
(構成16)
前記アブレーションアセンブリの前記全移動距離が、前記カテーテル呼び長さの約1%〜約20%である、構成15記載のアセンブリ。
(構成17)
前記アブレーションアセンブリの前記全移動距離が、前記カテーテル呼び長さの約1%〜約10%である、構成16記載のアセンブリ。
(構成18)
前記ハンドルが、電源コードへの接続用のコネクタをさらに備える、構成1〜17のいずれか一項記載のアセンブリ。
(構成19)
前記ハンドルが、電源として内部バッテリーをさらに備える、構成1〜18のいずれか一項記載のアセンブリ。
(構成20)
前記ハンドルが、流体源に接続するための流体接合部をさらに備える、構成1〜19のいずれか一項記載のアセンブリ。
(構成21)
前記細長いシャフトの前記第1の端部が、蛍光透視で視認できる表示装置を備え、該表示装置が、前記アブレーションアセンブリの前記送達装置に対する整合を示す、構成1〜20のいずれか一項記載のアセンブリ。
(構成22)
前記表示装置が、前記細長いシャフトの前記第1の端部の外面に沿った細長いストライプを備え、バンドが前記細長いシャフトに対して実質的に平行である、構成15記載のアセンブリ。
(構成23)
前記アブレーションアセンブリが、蛍光透視視覚化下で該アブレーションアセンブリの前記送達装置に対する位置を示す放射線不透過性マーカーを含む、構成1〜22のいずれか一項記載のアセンブリ。
(構成24)
送達装置への結合用であり、該送達装置が気管支鏡を備える、構成1〜23のいずれか一項記載のアセンブリ。
(構成25)
前記アブレーションアセンブリが、第1の収縮状態と第2の拡張状態との間で移動可能な拡張部材をさらに含み、前記エネルギー放射装置が、該拡張部材の一部の上又は内部に配置される、構成1〜24のいずれか一項記載のアセンブリ。
(構成26)
前記アブレーションアセンブリが、前記エネルギー放射装置及び/又は前記拡張部材の表面を冷却するために、冷却剤が循環するための冷却剤流路を含む、構成25記載のアセンブリ。
(構成27)
前記カテーテルアセンブリが、カテーテルの第2の端部から前記細長いシャフトに沿って前記アブレーションアセンブリの前記拡張部材の中まで延びている圧力チューブを含み、該圧力チューブの第1の端部が、前記ハンドルアセンブリ上に又はその近傍に配置された圧力センサに動作可能に結合され、該圧力チューブの第2の端部が、該拡張部材内に配置され、かつ少なくとも1つの開口を備え、これにより該圧力センサが該拡張部材内の圧力を検出する、構成26記載のアセンブリ。
(構成28)
前記圧力チューブがニチノールから形成される、構成27記載のアセンブリ。
(構成29)
前記アセンブリを使用するための一連の使用説明書をさらに含み、該使用説明書が:
前記アブレーションアセンブリを送達装置のチャネルを介して気道内に配置すること;
前記結合アセンブリを該送達装置に固定すること;及び
該アブレーションアセンブリを該気道内の位置に軸方向及び円周方向に移動させて患者に肺処置を行うように該結合アセンブリが該送達装置に固定されたままで前記制御部を移動させること、を含む、構成1記載のアセンブリ。
(構成30)
構成1〜29のいずれか一項記載のカテーテル及びハンドルアセンブリを用いた肺処置の方法であって、前記アブレーションアセンブリを送達装置のチャネルを介して気道内に配置するステップ、前記結合アセンブリを該送達装置に固定するステップ、及び、該アブレーションアセンブリを該気道内の位置に軸方向及び円周方向に移動させて患者に肺処置を行うように該結合アセンブリが該送達装置に固定されたまま前記制御部を移動させるステップを含む、前記方法。
(構成31)
前記肺処置が、前記アブレーションアセンブリからエネルギーを送達して気道壁に沿って神経幹をアブレーションするステップを含む、構成30記載の方法。
(構成32)
前記アブレーションアセンブリからエネルギーを送達するステップが、該アブレーションアセンブリ内の圧力が所定の最大圧力を超えると中止される、構成31記載の方法。
(構成33)
前記アブレーションアセンブリが、前記送達装置とは独立に操作可能である、構成30記載の肺処置の方法。
(構成34)
肺処置の方法であって、カテーテルを送達装置を介して患者の気道内に導入するステップ、該カテーテルに結合されたハンドルアセンブリを該送達装置に固定するステップ、及び該ハンドルアセンブリの制御部を移動させて該カテーテルの遠位部分を気道内のある位置まで軸方向及び円周方向に操作して、患者に肺処置を行うステップを含み、該カテーテルの該遠位部分が、該送達装置に結合された可視化装置とは独立に操作可能であり、かつ該カテーテルの該遠位部分が、該遠位部分の表示が視覚化された状態で操作される、前記方法。
(構成35)
肺処置の方法であって:
カテーテルを送達装置を介して患者の気道内に導入するステップ;
該カテーテルに結合されたハンドルアセンブリを該送達装置に固定するステップ;
該ハンドルアセンブリの制御部を移動させて、該気道内の第1の円周位置まで該カテーテルの遠位部分を円周方向に操作するステップ;
該第1の円周位置で第1の処置を行うステップ;
該ハンドルアセンブリの該制御部を移動させて、該気道内の第2の円周位置まで該カテーテルの該遠位部分を円周方向に操作するステップ;及び
前記第2の円周位置で第2の処置を行うステップを含み;
該カテーテルの該遠位部分が該第1及び第2の円周位置に操作される間に、該ハンドルアセンブリが該送達装置に固定されたままである、前記方法。
(構成36)
前記カテーテルの遠位部分が前記第1及び第2の円周位置に操作されるときに、前記送達装置が前記気道に対して静止位置に維持される、構成35記載の方法。
(構成37)
前記第1の処置後及び前記第2の処置前に、前記ハンドルアセンブリが前記送達装置に固定されたまま前記制御部を移動させて、前記カテーテルの遠位部分を該送達装置内に引き込むステップをさらに含む、構成35記載の方法。
(構成38)
前記カテーテルの遠位部分が拡張部材を備え、該拡張部材の全長が前記送達装置内に引き込まれるように前記制御部が移動する、構成37記載の方法。
(構成39)
第1及び第2の処置が、前記カテーテルの遠位部分から前記気道の壁にエネルギーを送達して該壁に沿って神経幹をアブレーションするステップを含む、構成35記載の方法。
(構成40)
前記送達装置が光学チャネルを備え、前記方法が、前記カテーテルの遠位部分が前記第1及び第2の円周位置に操作されるときに、該遠位部分を該光学チャネルを介して観察するステップをさらに含む、構成35記載の方法。
(構成41)
前記カテーテルの遠位部分が、それに結合された拡張部材を有し、該拡張部材が、拡張した場合に前記光学チャネルに光学的に結合される所定の位置まで、前記制御部を移動させるステップをさらに含む、構成40記載の方法。
(構成42)
前記遠位部分を前記第1及び第2の円周位置に操作する間、前記カテーテルの遠位部分の表示を蛍光透視で視覚化するステップをさらに含む、構成35記載の方法。
(構成43)
前記第1の処置を行った後及び前記第2の処置を行う前に、前記ハンドルアセンブリが固定された前記送達装置を操作して、前記カテーテルの遠位部分を前記気道に対して回転方向に再配置するステップをさらに含む、構成35記載の方法。
(構成44)
構成1〜43のいずれか一項記載の肺処置の方法を行うためのキットであって:
カテーテルアセンブリであって、
細長いシャフト、
該細長いシャフトの第1の端部に結合された、エネルギー放射装置を備えるアブレーションアセンブリを含む、該カテーテルアセンブリ;
該細長いシャフトの第2の端部に結合されたハンドルアセンブリであって、
ハンドルフレーム及び制御部を含み、該制御部が、該ハンドルフレームに対して移動可能であり、かつ該制御部の移動により、該アブレーションアセンブリが該ハンドルフレームに対して軸方向及び円周方向の少なくとも一方に移動するように、該制御部が該細長いシャフトに結合されている、該ハンドルアセンブリ、
第1のカップラー及びロック装置を含む結合アセンブリであって、該ハンドルフレームを送達装置のポートに固定結合するように構成され、該アブレーションアセンブリが移動する間に該送達装置に対して固定されたままである、該結合アセンブリ;及び
構成1〜43のいずれか一項記載の肺処置の方法を行うための使用説明書、を含む、前記キット。
(構成45)
第2のカップラー及びシースを含むアダプターアセンブリをさらに含み、前記送達装置の前記ポートが、前記結合アセンブリの前記第1のカップラーが該ポートに直接結合されないように該第1のカップラーとは異なる大きさであり、該ポートが、該第2のカップラーの第1の端部が該ポートに結合可能であるように該第1の端部に実質的に等しい大きさであり、かつ該第2のカップラーの第2の端部が、該第2のカップラーの該第2の端部が該第1のカップラーに結合可能であるように該第1のカップラーに実質的に等しい大きさであり、これにより前記ハンドルアセンブリが該送達装置の該ポートに間接的に結合される、構成44記載のキット。
(構成46)
前記第2のカップラーが、前記第1の端部のフランジ、前記第2の端部のカラー部、及び該フランジと該カラーとの間に延在する首部を備え、前記第1のカップラーの端部を該フランジで受け止めるように構成され、該カラー部が前記ポートに適合するように構成されている、構成45記載のキット。
(構成47)
前記第2のカップラーの少なくとも前記カラーが、前記アダプターアセンブリの前記ポートとの係合及び/又は係合解除の際の前記カップラーの拡張及び/又は収縮を容易にするために1つ以上のリリーフスロットを備える、構成46記載のキット。
(構成48)
前記使用説明書が、書面の使用説明書、CD、CD-ROM、DVD、ブルーレイであり、かつ/又は個人用機器、例えば、コンピューター、タブレット、スマート機器にデジタルダウンロード可能又はこれらで視聴可能である、構成44〜47のいずれか一項記載のキット。
(構成49)
カテーテル及びハンドルアセンブリであって:
細長いシャフト;
該細長いシャフトの第1の端部に結合され、エネルギー放射装置を備えるアブレーションアセンブリ;
該細長いシャフトの第2の端部に固定されたハンドル;及び
該ハンドルに結合され、かつ送達装置のポートに結合可能な結合アセンブリを含み、該ハンドルの一部が、該結合アセンブリ及び該ポートに対して移動可能であり、該結合アセンブリが該送達装置に対して固定された状態で、該アブレーションアセンブリを該送達装置に対して軸方向及び円周方向の少なくとも一方に移動させる、前記カテーテル及びハンドルアセンブリ。
(構成50)
肺処置の方法であって、カテーテルを送達装置を介して患者の気道内に導入するステップ、該カテーテルに結合されたハンドルアセンブリを該送達装置に固定するステップ、及び該ハンドルアセンブリの制御部を移動させて該カテーテルの遠位部分を気道内のある位置まで軸方向及び円周方向に操作して、患者に肺処置を行うステップを含み、該カテーテルの該遠位部分が、該送達装置に結合された可視化装置とは独立に操作可能である、前記方法。
(構成51)
カテーテルアセンブリを使用者に提供するステップであって、該カテーテルが:
細長いシャフト;及び
該細長いシャフトの第1の端部に結合され、エネルギー放射装置を備えるアブレーションアセンブリを含む、該ステップ;
ハンドルアセンブリを該使用者に提供するステップであって、該ハンドルアセンブリが、該細長いシャフトの第2の端部に結合可能であり、該ハンドルアセンブリが:
ハンドルフレーム;及び
制御部であって、該ハンドルフレームに対して移動可能であり、該制御部の移動により、該ハンドルフレームに対して軸方向及び円周方向の少なくとも一方に該アブレーションアセンブリが移動するように該細長いシャフトに結合された、該制御部を含む、該ステップ;並びに
使用説明書を該使用者に提供するステップであって、該使用説明書が:
前記ハンドルアセンブリを送達装置のポートに固定すること;
該アブレーションアセンブリを患者の気道内の所望の位置に軸方向及び円周方向に移動させるように該ハンドルアセンブリの該制御部を操作すること;及び
該アブレーションアセンブリによって患者に肺処置を行うことを含む、該ステップを含む、方法。
(構成52)
結合アセンブリを前記使用者に提供するステップであって、該結合アセンブリが、前記ハンドルアセンブリと前記送達装置の前記ポートとを結合するように構成され、該結合アセンブリが、前記アブレーションアセンブリが移動する間に該送達装置に対する固定が維持されるように構成されている、該ステップをさらに含む、構成51記載の方法。
(構成53)
使用者にカテーテルアセンブリを提供するステップが、該カテーテルアセンブリを製造させ、該使用者に利用可能にするステップを含み、ハンドルアセンブリを該使用者に提供するステップが、該ハンドルアセンブリを製造させ、該使用者に利用可能にするステップを含む、構成51記載の方法。
Claims (23)
- 送達装置に結合するように構成された結合用カテーテル及びハンドルアセンブリであって、該送達装置が、近位作業ポート、遠位作業端部、及び該近位作業ポートと該遠位作業端部との間に延在し、これにより作業長さを画定する作業チャネルを備え、該カテーテル及びハンドルアセンブリが:
カテーテルアセンブリであって、
可撓性の細長いシャフト、
該細長いシャフトの第1の端部に結合されたアブレーションアセンブリであって、該アブレーションアセンブリが、エネルギー放射装置、及び第1の収縮状態と第2の拡張状態との間で移動可能な拡張部材を有し、該エネルギー放射装置が、該拡張部材の一部の上又は内部に配置されており、該アブレーションアセンブリが、該エネルギー放射装置及び/又は該拡張部材の表面を冷却するために、冷却剤がその中を循環する冷却剤流路をさらに備える、該アブレーションアセンブリ、及び
該細長いシャフトの第2の端部から該細長いシャフトに沿って該アブレーションアセンブリの該拡張部材の中まで延びている圧力チューブであって、該圧力チューブの第1の端部が、該ハンドルアセンブリ上に又はその近傍に配置された圧力センサに動作可能に結合され、該圧力チューブの第2の端部が、該拡張部材内に配置され、かつ少なくとも1つの開口を備え、これにより該圧力センサが該拡張部材内の圧力を検出するように構成される、該圧力チューブ
を含む、該カテーテルアセンブリ;並びに
該細長いシャフトの第2の端部に結合されたハンドルアセンブリであって、
該ハンドルアセンブリがハンドルフレーム及び制御部を備え、該制御部が該ハンドルフレームに対し、及びそれに渡って移動可能であり、かつ該細長いシャフトに結合されており、該制御部は、該送達装置に対して該アブレーションアセンブリを回転させるために該カテーテル及びハンドルアセンブリが該送達装置に結合されたときに該ハンドルフレームを中心に回転するように構成され、かつ該送達装置に対して軸方向に該アブレーションアセンブリを移動させるために該ハンドルフレームに沿って軸方向に移動するように構成された本体を備え、
該細長いシャフトの第1の部分は、該カテーテル及びハンドルアセンブリが該送達装置に動作可能に結合されるときに該送達装置の該作業チャネル内部に、及びそれを通過して延在するように構成され、かつ
該ハンドルアセンブリが、該アブレーションアセンブリをそこを通過する流体の循環のための流体源に流体結合するように構成された流体接合部をさらに備える、該ハンドルアセンブリ
を備える、前記カテーテル及びハンドルアセンブリ。 - 前記制御部が移動すると、前記細長いシャフト及び前記アブレーションアセンブリの両方が前記送達装置に対して移動する、請求項1記載のカテーテル及びハンドルアセンブリ。
- 前記ハンドルアセンブリ、及び前記送達装置の前記作業ポートに結合するように構成された結合アセンブリであって、前記アブレーションアセンブリを移動させるために前記制御部が移動する間、該送達装置及び前記ハンドルフレームに対して固定された状態を維持するように構成された該結合アセンブリをさらに備え、
該結合アセンブリが、該ハンドルアセンブリを該送達装置の前記近位作業ポートに固定するためのカップラー及びロック機構を備える、請求項1又は2記載のカテーテル及びハンドルアセンブリ。 - 前記本体が一方向に回転すると、前記アブレーションアセンブリが同じ方向に回転する、請求項1記載のカテーテル及びハンドルアセンブリ。
- 前記本体が、前記ハンドルフレームに回転結合されたハンドルハウジングを備える、請求項1記載のカテーテル及びハンドルアセンブリ。
- 前記本体が一軸方向に移動すると、前記シャフト及び前記アブレーションアセンブリが同じ軸方向に移動する、請求項1記載のカテーテル及びハンドルアセンブリ。
- 前記制御部が、前記ハンドルフレームに対して第1の状態と第2の状態との間で変化可能であり、該制御部が、該制御部の変化により前記アブレーションアセンブリを前記ハンドルフレームに対して軸方向に移動させるように前記細長いシャフトに結合されており、
該第1の状態において、該アブレーションアセンブリは前記作業チャネル内に引き込まれており、該第2の状態において、該アブレーションアセンブリは前記送達装置の前記作業端部から延出しており、かつ
該カテーテルアセンブリの該細長いシャフトは、該制御部が該第1の状態及び該第2の状態の一方にあるときに該送達装置の前記作業長さと同等以上のカテーテル呼び長さを有する、請求項1〜6のいずれか一項記載のカテーテル及びハンドルアセンブリ。 - 前記カテーテル呼び長さが、前記アブレーションアセンブリの前記送達装置の前記作業端部に結合された又は該作業端部と一体となった視覚化装置との光学的結合を可能にする、請求項7記載のカテーテル及びハンドルアセンブリ。
- 前記制御部が、前記アブレーションアセンブリの一部が前記作業チャネル内に引き込まれるように中間の状態に変化可能である、請求項7記載のカテーテル及びハンドルアセンブリ。
- 前記制御部が前記第1の状態にあるときに、前記アブレーションアセンブリの全体が前記作業チャネル内に引き込まれる、請求項9記載のカテーテル及びハンドルアセンブリ。
- 前記制御部が前記第2の状態にあるときに、前記アブレーションアセンブリが前記送達装置の前記作業端部から約0.1〜約4.0cmの距離を延出する、請求項7記載のカテーテル及びハンドルアセンブリ。
- 前記制御部が前記第1の状態と前記第2の状態との間で変化するときの前記アブレーションアセンブリの全移動距離が、該アブレーションアセンブリの長手方向の長さと同等以上である、請求項7記載のカテーテル及びハンドルアセンブリ。
- 前記アブレーションアセンブリの前記全移動距離が、前記カテーテル呼び長さの約1%〜約20%である、請求項12記載のカテーテル及びハンドルアセンブリ。
- 前記アブレーションアセンブリの前記全移動距離が、前記カテーテル呼び長さの約1%〜約10%である、請求項13記載のカテーテル及びハンドルアセンブリ。
- 前記ハンドルアセンブリが、電源コードへの接続用のコネクタをさらに備える、請求項1〜14のいずれか一項記載のカテーテル及びハンドルアセンブリ。
- 前記ハンドルアセンブリが、電源として内部バッテリーをさらに備える、請求項1〜15のいずれか一項記載のカテーテル及びハンドルアセンブリ。
- 前記細長いシャフトの前記第1の端部が、蛍光透視で視認できる表示装置を備え、該蛍光透視で視認できる表示装置が、前記アブレーションアセンブリの前記送達装置に対する整合を示す、請求項1〜16のいずれか一項記載のカテーテル及びハンドルアセンブリ。
- 前記蛍光透視で視認できる表示装置が、前記細長いシャフトの前記第1の端部の外面に沿った細長いストライプを備え、該ストライプが該細長いシャフトに対して実質的に平行である、請求項17記載のカテーテル及びハンドルアセンブリ。
- 前記アブレーションアセンブリが、蛍光透視視覚化下で該アブレーションアセンブリの前記送達装置に対する位置を示す放射線不透過性マーカーを含む、請求項1〜18のいずれか一項記載のカテーテル及びハンドルアセンブリ。
- 前記送達装置であって、前記カテーテル及びハンドルアセンブリがこれに結合されるように構成される該送達装置が、気管支鏡を備える、請求項1〜19のいずれか一項記載のカテーテル及びハンドルアセンブリ。
- 前記圧力チューブがニチノールから形成される、請求項1記載のカテーテル及びハンドルアセンブリ。
- カテーテル及びハンドルキットであって、
請求項1記載のカテーテル及びハンドルアセンブリ;及び
該カテーテル及びハンドルアセンブリを使用するために構成された一連の使用説明書であって、
前記アブレーションアセンブリを前記送達装置の前記作業チャネルを介して移動させることによって、該アブレーションアセンブリを気道内に配置すること;
前記ハンドルフレームを該送達装置に固定すること;及び
該アブレーションアセンブリを該気道内の位置に軸方向及び円周方向に移動させて患者に肺処置を行うように該ハンドルフレームが該送達装置に固定されたままで前記制御部を移動させること
を含む工程の記載を含む、該使用説明書
を含む、前記カテーテル及びハンドルキット。 - カテーテル及びハンドルアセンブリであって:
細長いシャフト;
該細長いシャフトの第1の端部に結合されたアブレーションアセンブリであって、該アブレーションアセンブリが、エネルギー放射装置、及び第1の収縮状態と第2の拡張状態との間で移動可能な拡張部材を有し、該エネルギー放射装置が、該拡張部材の一部の上又は内部に配置されており、該アブレーションアセンブリが、該エネルギー放射装置及び/又は該拡張部材の表面を冷却するために、冷却剤がその中を循環する冷却剤流路をさらに備える、該アブレーションアセンブリ;
該細長いシャフトの第2の端部から該細長いシャフトに沿って該アブレーションアセンブリの該拡張部材の中まで延びている圧力チューブであって、該圧力チューブの第1の端部が、該ハンドルアセンブリ上に又はその近傍に配置された圧力センサに動作可能に結合され、該圧力チューブの第2の端部が、該拡張部材内に配置され、かつ少なくとも1つの開口を備え、これにより該圧力センサが該拡張部材内の圧力を検出するように構成される、該圧力チューブ
該細長いシャフトの第2の端部に結合されたハンドル;及び
該ハンドルに結合され、かつ送達装置のポートに結合可能な結合アセンブリを備え、
該ハンドルの第1の部分が該結合アセンブリに対して固定され、該ハンドルの第2の部分が、該第1の部分を覆い、かつ該第2の部分が該第1の部分に対して軸方向に移動されるときには軸方向に、及び該結合アセンブリが該送達装置に対して固定された状態で該第2の部分が該第1の部分の周りを回転するときには回転方向に、該アブレーションアセンブリを該送達装置に対して移動させるために、該第1の部分及び該結合アセンブリに対して移動可能であり、
該ハンドルが、該アブレーションアセンブリをそこを通過する流体の循環のための流体源に流体結合するために構成された流体接合部をさらに備える、前記カテーテル及びハンドルアセンブリ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361915282P | 2013-12-12 | 2013-12-12 | |
| US61/915,282 | 2013-12-12 | ||
| PCT/US2014/069971 WO2015089377A1 (en) | 2013-12-12 | 2014-12-12 | Catheter and handle assembly, systems, and methods |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017502734A JP2017502734A (ja) | 2017-01-26 |
| JP2017502734A5 JP2017502734A5 (ja) | 2018-01-25 |
| JP6728046B2 true JP6728046B2 (ja) | 2020-07-22 |
Family
ID=53371863
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016538675A Active JP6728046B2 (ja) | 2013-12-12 | 2014-12-12 | カテーテル及びハンドルアセンブリ、システム、並びに方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12114916B2 (ja) |
| EP (2) | EP4324380A3 (ja) |
| JP (1) | JP6728046B2 (ja) |
| CN (2) | CN105828736B (ja) |
| WO (1) | WO2015089377A1 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040226556A1 (en) | 2003-05-13 | 2004-11-18 | Deem Mark E. | Apparatus for treating asthma using neurotoxin |
| JP5826450B2 (ja) | 2005-07-22 | 2015-12-02 | ザ ファウンドリー, エルエルシー | 治療薬の送達のためのシステムおよび方法 |
| US8483831B1 (en) | 2008-02-15 | 2013-07-09 | Holaira, Inc. | System and method for bronchial dilation |
| US8088127B2 (en) | 2008-05-09 | 2012-01-03 | Innovative Pulmonary Solutions, Inc. | Systems, assemblies, and methods for treating a bronchial tree |
| US20100114081A1 (en) | 2008-11-05 | 2010-05-06 | Spectranetics | Biasing laser catheter: monorail design |
| US8702773B2 (en) | 2008-12-17 | 2014-04-22 | The Spectranetics Corporation | Eccentric balloon laser catheter |
| AU2010319477A1 (en) | 2009-11-11 | 2012-05-24 | Holaira, Inc. | Systems, apparatuses, and methods for treating tissue and controlling stenosis |
| US8911439B2 (en) | 2009-11-11 | 2014-12-16 | Holaira, Inc. | Non-invasive and minimally invasive denervation methods and systems for performing the same |
| WO2013052501A1 (en) | 2011-10-05 | 2013-04-11 | Innovative Pulmonary Solutions, Inc. | Apparatus for injuring nerve tissue |
| EP3212103B1 (en) | 2014-10-29 | 2021-12-15 | The Spectranetics Corporation | Laser energy delivery devices including laser transmission detection systems and methods |
| US10492863B2 (en) | 2014-10-29 | 2019-12-03 | The Spectranetics Corporation | Laser energy delivery devices including laser transmission detection systems and methods |
| US20190150963A1 (en) * | 2016-05-18 | 2019-05-23 | Montefiore Medical Center | Devices and methods for respiratory airways bleeding management and temporary occlusion of airways |
| WO2017214516A1 (en) | 2016-06-09 | 2017-12-14 | Nuvaira, Inc. | Systems and methods for improved delivery of expandable catheter assemblies into body lumens |
| US11369434B2 (en) | 2016-06-22 | 2022-06-28 | Covidien Lp | Systems and methods for determining the status of a fluid-cooled microwave ablation system |
| KR20190062419A (ko) | 2016-10-04 | 2019-06-05 | 아벤트, 인크. | 냉각된 rf 프로브 |
| CN110177515B (zh) | 2016-12-07 | 2024-09-13 | 努瓦拉公司 | 用于降低治疗变化性并增加治疗效力和持久性的方法和系统 |
| WO2018109979A1 (ja) * | 2016-12-14 | 2018-06-21 | オリンパス株式会社 | 内視鏡 |
| CN109464186B (zh) | 2017-09-08 | 2023-12-22 | 泽丹医疗股份有限公司 | 治疗肺部肿瘤的装置和方法 |
| CN112261915A (zh) * | 2018-06-07 | 2021-01-22 | 赞克特机器人有限公司 | 用于可安装在身体上的医疗器械的附接设备 |
| CN110074861B (zh) * | 2018-09-14 | 2024-05-07 | 杭州堃博生物科技有限公司 | 射频消融导管、肺部射频消融系统、以及相应的控制方法、控制装置和计算机可读存储介质 |
| CN109805999B (zh) * | 2019-02-19 | 2021-03-30 | 西安外科医学科技有限公司 | 一种内窥镜下定位伸缩的等离子体射频双极高频手术刀头 |
| US11166622B2 (en) | 2020-02-21 | 2021-11-09 | Ambu A/S | Video processing apparatus |
| US10980397B1 (en) | 2020-02-21 | 2021-04-20 | Ambu A/S | Video processing device |
| US10835106B1 (en) | 2020-02-21 | 2020-11-17 | Ambu A/S | Portable monitor |
| CN115605154A (zh) * | 2020-03-13 | 2023-01-13 | 生物相容英国有限公司(Gb) | 用于消融设备的斜升功能 |
| US11007001B1 (en) * | 2020-04-07 | 2021-05-18 | Sonivie Ltd. | Devices and methods for reducing parasympathetic nerve activity in patients with a respiratory syndrome |
| US11918282B2 (en) * | 2020-04-17 | 2024-03-05 | Biosense Webster (Israel) Ltd. | Pressure relief feature for irrigated RF balloon catheter |
| CN113521468B (zh) * | 2021-06-21 | 2022-11-11 | 南昌大学第二附属医院 | 气管导管的置管深度检测装置及气管导管 |
| CN113413118B (zh) * | 2021-07-31 | 2022-10-25 | 杭州市第一人民医院 | 一种用于内镜检查使用的附件定位器 |
| US20240164842A1 (en) * | 2022-11-21 | 2024-05-23 | Nuvaira, Inc. | Utilization of three-dimensional navigation technology during lung denervation procedures |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5066295A (en) * | 1986-05-13 | 1991-11-19 | Mill-Rose Laboratories, Inc. | Rotatable surgical snare |
| US5536248A (en) * | 1992-05-11 | 1996-07-16 | Arrow Precision Products, Inc. | Method and apparatus for electrosurgically obtaining access to the biliary tree and placing a stent therein |
| US5599300A (en) * | 1992-05-11 | 1997-02-04 | Arrow Precision Products, Inc. | Method for electrosurgically obtaining access to the biliary tree with an adjustably positionable needle-knife |
| JP3133005B2 (ja) * | 1996-12-25 | 2001-02-05 | 加茂精工株式会社 | 回転運動と直線運動の変換装置 |
| US6352539B1 (en) * | 1997-05-02 | 2002-03-05 | Scilogy Corp. | Surgical instrument with rotatable shaft |
| US5971979A (en) * | 1997-12-02 | 1999-10-26 | Odyssey Technologies, Inc. | Method for cryogenic inhibition of hyperplasia |
| US6837885B2 (en) * | 1998-05-22 | 2005-01-04 | Scimed Life Systems, Inc. | Surgical probe for supporting inflatable therapeutic devices in contact with tissue in or around body orifices and within tumors |
| US20010044625A1 (en) * | 1998-05-27 | 2001-11-22 | Cary Hata | Catheter for circular tissue ablation and methods thereof |
| US6296639B1 (en) * | 1999-02-12 | 2001-10-02 | Novacept | Apparatuses and methods for interstitial tissue removal |
| WO2000066017A1 (en) * | 1999-05-04 | 2000-11-09 | Curon Medical, Inc. | Electrodes for creating lesions in tissue regions at or near a sphincter |
| US7785323B2 (en) * | 2000-12-04 | 2010-08-31 | Boston Scientific Scimed, Inc. | Loop structure including inflatable therapeutic device |
| US8613744B2 (en) * | 2002-09-30 | 2013-12-24 | Relievant Medsystems, Inc. | Systems and methods for navigating an instrument through bone |
| US20040226556A1 (en) | 2003-05-13 | 2004-11-18 | Deem Mark E. | Apparatus for treating asthma using neurotoxin |
| US7198625B1 (en) * | 2003-10-01 | 2007-04-03 | Stryker Corporation | Surgical instrument with retractable sheath |
| DE102004018872A1 (de) | 2004-04-19 | 2005-11-03 | Cervitech, Inc. | Knochenspreizer |
| JP2006187471A (ja) * | 2005-01-06 | 2006-07-20 | Olympus Medical Systems Corp | 内視鏡用処置具 |
| JP2006288755A (ja) | 2005-04-11 | 2006-10-26 | Olympus Medical Systems Corp | 医療処置装置 |
| JP5826450B2 (ja) | 2005-07-22 | 2015-12-02 | ザ ファウンドリー, エルエルシー | 治療薬の送達のためのシステムおよび方法 |
| US8660647B2 (en) | 2005-07-28 | 2014-02-25 | Cyberonics, Inc. | Stimulating cranial nerve to treat pulmonary disorder |
| JP4749855B2 (ja) * | 2005-12-13 | 2011-08-17 | オリンパスメディカルシステムズ株式会社 | 内視鏡用処置具 |
| JP4961808B2 (ja) | 2006-04-05 | 2012-06-27 | マックス株式会社 | 鉄筋結束機 |
| US8197396B2 (en) * | 2006-04-26 | 2012-06-12 | Olympus Medical Systems Corp. | Treatment tool for endoscope and medical procedure |
| JP5160050B2 (ja) | 2006-06-07 | 2013-03-13 | オリンパスメディカルシステムズ株式会社 | 内視鏡用処置具 |
| WO2007149263A1 (en) | 2006-06-16 | 2007-12-27 | Wilson-Cook Medical Inc. | Wire guide sphincterotome |
| EP1892010B1 (en) | 2006-08-25 | 2010-10-06 | Pulsion Medical Systems AG | Enteral feeding catheter and apparatus for determining the intraabdominal pressure of a patient |
| US8597288B2 (en) * | 2008-10-01 | 2013-12-03 | St. Jude Medical, Artial Fibrillation Division, Inc. | Vacuum-stabilized ablation system |
| US8663221B2 (en) * | 2007-06-08 | 2014-03-04 | Olympus Medical Systems Corp. | Endoscopic treatment tool |
| US8105230B2 (en) * | 2007-07-09 | 2012-01-31 | Olympus Medical Systems Corp. | Medical system |
| JP5053749B2 (ja) | 2007-08-02 | 2012-10-17 | オリンパスメディカルシステムズ株式会社 | 内視鏡用処置具の操作部構造 |
| US8483831B1 (en) | 2008-02-15 | 2013-07-09 | Holaira, Inc. | System and method for bronchial dilation |
| US9492216B2 (en) * | 2008-03-12 | 2016-11-15 | Afreeze Gmbh | Handle for an ablation device |
| US8088127B2 (en) | 2008-05-09 | 2012-01-03 | Innovative Pulmonary Solutions, Inc. | Systems, assemblies, and methods for treating a bronchial tree |
| WO2010135602A1 (en) * | 2009-05-20 | 2010-11-25 | Osseon Therapeutics, Inc. | Steerable curvable ablation catheter for vertebroplasty |
| ITBO20090073U1 (it) | 2009-09-30 | 2011-04-01 | Tre Esse Progettazione Biomedica S R L | Dispositivo telescopico di guida, con adattatori, da montare su cateteri per agevolarne l'inserimento nel sistema cardiovascolare umano con procedura manuale o tramite manipolatore robotico. |
| CN104042322B (zh) | 2009-10-27 | 2017-06-06 | 赫莱拉公司 | 具有可冷却的能量发射组件的递送装置 |
| AU2010319477A1 (en) | 2009-11-11 | 2012-05-24 | Holaira, Inc. | Systems, apparatuses, and methods for treating tissue and controlling stenosis |
| US8911439B2 (en) | 2009-11-11 | 2014-12-16 | Holaira, Inc. | Non-invasive and minimally invasive denervation methods and systems for performing the same |
| US20120302909A1 (en) | 2009-11-11 | 2012-11-29 | Mayse Martin L | Methods and systems for screening subjects |
| EP2401977B1 (en) * | 2009-12-22 | 2013-02-13 | Olympus Medical Systems Corp. | Treatment device for endoscope |
| DK2531122T3 (da) * | 2010-02-02 | 2014-06-23 | Medi Globe Gmbh | Anordning til fastlæggelse af indtrængningsdybden af en rør- eller stangformet skydedel i en optagedel og medicinsk håndstykke, der anvender sådanne anordninger |
| CN102905639B (zh) | 2010-04-06 | 2015-05-06 | 赫莱拉公司 | 用于肺部处理的系统和方法 |
| US10575893B2 (en) | 2010-04-06 | 2020-03-03 | Nuvaira, Inc. | System and method for pulmonary treatment |
| US8911434B2 (en) * | 2010-10-22 | 2014-12-16 | Medtronic Cryocath Lp | Balloon catheter with deformable fluid delivery conduit |
| US8945107B2 (en) * | 2010-10-26 | 2015-02-03 | Medtronic Ardian Luxembourg S.A.R.L. | Neuromodulation cryotherapeutic devices and associated systems and methods |
| WO2013052501A1 (en) | 2011-10-05 | 2013-04-11 | Innovative Pulmonary Solutions, Inc. | Apparatus for injuring nerve tissue |
| US10064678B2 (en) * | 2011-10-26 | 2018-09-04 | Medtronic Ablation Frontiers Llc | Semi-circular pulmonary vein ablation catheter |
| US20150088113A1 (en) * | 2012-04-27 | 2015-03-26 | Medtronic Ardian Luxembourg S.A.R.L. | Cryotherapeutic devices for renal neuromodulation and associated systems and methods |
| CN108652736B (zh) | 2012-05-18 | 2022-06-10 | 努瓦拉公司 | 紧凑传送的肺部治疗系统和改善肺部功能的方法 |
| US9398933B2 (en) | 2012-12-27 | 2016-07-26 | Holaira, Inc. | Methods for improving drug efficacy including a combination of drug administration and nerve modulation |
| JP6862178B2 (ja) | 2013-03-13 | 2021-04-21 | ヌバイラ, インコーポレイテッド | 処置のための流体送達システム及び方法 |
| US11103684B2 (en) | 2013-03-15 | 2021-08-31 | Nuvaira, Inc. | Systems, devices, and methods for treating a pulmonary disorder with an agent |
| US11446524B2 (en) | 2013-09-12 | 2022-09-20 | Nuvaira Inc. | Systems, devices, and methods for treating a pulmonary disease with ultrasound energy |
-
2014
- 2014-12-12 CN CN201480068344.4A patent/CN105828736B/zh active Active
- 2014-12-12 EP EP23207081.3A patent/EP4324380A3/en active Pending
- 2014-12-12 US US15/103,500 patent/US12114916B2/en active Active
- 2014-12-12 WO PCT/US2014/069971 patent/WO2015089377A1/en active Application Filing
- 2014-12-12 EP EP14868857.5A patent/EP3079621B1/en active Active
- 2014-12-12 JP JP2016538675A patent/JP6728046B2/ja active Active
- 2014-12-12 CN CN202210924088.0A patent/CN115227387A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US12114916B2 (en) | 2024-10-15 |
| EP4324380A2 (en) | 2024-02-21 |
| CN105828736B (zh) | 2022-08-19 |
| CN105828736A (zh) | 2016-08-03 |
| WO2015089377A1 (en) | 2015-06-18 |
| JP2017502734A (ja) | 2017-01-26 |
| EP3079621B1 (en) | 2023-11-01 |
| US20160310210A1 (en) | 2016-10-27 |
| EP3079621A1 (en) | 2016-10-19 |
| EP4324380A3 (en) | 2024-05-15 |
| EP3079621A4 (en) | 2017-08-23 |
| CN115227387A (zh) | 2022-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6728046B2 (ja) | カテーテル及びハンドルアセンブリ、システム、並びに方法 | |
| JP7555996B2 (ja) | 拡張可能カテーテルアセンブリの体腔への改善された送達のためのシステムおよび方法 | |
| US10779891B2 (en) | System and method for navigation of surgical instruments | |
| US20230157783A1 (en) | Systems and methods for delivering targeted therapy | |
| JP6274923B2 (ja) | マイクロ波エネルギー送達装置及びシステム | |
| AU2007309319B2 (en) | Electrode markers and methods of use | |
| US20140088457A1 (en) | Bleeding containment device | |
| US10342608B2 (en) | Ablation catheter system and method for deploying same | |
| JP7038159B2 (ja) | カテーテル延在制御 | |
| WO2023239970A1 (en) | Steerable catheter device with video capabilities and methods of treatment using same | |
| Aron | Ureteroscopy into the Future: Robotic Ureteroscopy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180921 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6728046 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |