JP6711670B2 - 情報処理装置、画像表示装置、画像表示システム、および情報処理方法 - Google Patents
情報処理装置、画像表示装置、画像表示システム、および情報処理方法 Download PDFInfo
- Publication number
- JP6711670B2 JP6711670B2 JP2016075487A JP2016075487A JP6711670B2 JP 6711670 B2 JP6711670 B2 JP 6711670B2 JP 2016075487 A JP2016075487 A JP 2016075487A JP 2016075487 A JP2016075487 A JP 2016075487A JP 6711670 B2 JP6711670 B2 JP 6711670B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- display
- optical system
- unit
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000010365 information processing Effects 0.000 title claims description 21
- 238000003672 processing method Methods 0.000 title claims 5
- 230000003287 optical effect Effects 0.000 claims description 116
- 238000012937 correction Methods 0.000 claims description 82
- 238000003384 imaging method Methods 0.000 claims description 67
- 230000008859 change Effects 0.000 claims description 39
- 238000000034 method Methods 0.000 claims description 36
- 230000008569 process Effects 0.000 claims description 30
- 238000004364 calculation method Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000002194 synthesizing effect Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000004075 alteration Effects 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000003786 synthesis reaction Methods 0.000 description 3
- 230000003190 augmentative effect Effects 0.000 description 2
- 210000003128 head Anatomy 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images






Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Controls And Circuits For Display Device (AREA)
Description
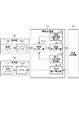
以下、本発明の第1の実施形態について、図面を参照しながら説明する。図1は、本実施形態における画像表示システムの構成を示すブロック図である。図1に示すように、本実施形態の画像表示システムは大きく分けて4つの機能部より構成されており、撮像映像を生成する撮像部10と、撮像映像および表示映像に対して画像処理を行う画像処理部11とを有する。さらに、撮像映像の内容に応じて重畳するCGデータを演算し、表示映像(表示画像)を作成する画像合成部12と、表示映像を表示し使用者に映像を視認させる表示部13とを有している。
ここで、本実施形態の画像表示システムにおいて、画像処理部11が有する撮像歪み補正部111および撮像光学特性保持部112の処理の詳細について説明する。撮像歪み補正部111は、撮像光学特性保持部112に保持された撮像光学特性の情報に基づいて、歪み補正処理を行う。撮像歪み補正部111と撮像光学特性保持部112は、例えば、同一基板に撮像歪み補正機能を搭載したLSIと撮像光学特性を保持するFLASH ROMを実装しFLASH ROMより撮像光学特性の情報を読み込むことで実現される。また、アプリケーションとして撮像歪み補正機能を実現する構成等としてもよく、撮像歪み補正を行える構成であれば特定の構成に限定されるものではない。
次に、本実施形態に係る映像切り出し部110の処理の詳細について説明する。図4は、映像切り出し部110の機能構成を示す概略ブロック図である。映像切り出し部110は、画角変化演算部1100と切り出し実行部1101とにより構成されている。画角変化演算部1100は、撮像光学特性保持部112および表示光学特性保持部114から読み込んだ撮像光学特性情報および表示光学特性情報に基づいて、両歪み補正における入力映像の画角変化を計算し、システムに最適な切り出し解像度を算出する。また、切り出し実行部1101は、画角変化演算部1100で計算した切り出し解像度を元に、入力される撮像映像に対して切り出し処理を実行する。
ここで、上述した第1の実施形態の変形例について説明する。図7は、本変形例に係る画像表示システムを示すブロック図である。本変形例が、上述した第1の実施形態と相違する点は、画像処理部11の内部構成である。具体的には、本変形例では、撮像歪み補正処理と表示歪み補正処理を共通歪み補正部702により共通で処理するとともに、共通歪みテーブル演算部701を備えている。また、映像切り出し部700は、共通歪みテーブル演算部701からの入力により切り出し解像度を決定する構成としている。
上述の説明では、HMD側が撮像部10と表示部13とを備え、情報処理装置(PC)側が画像処理部11と画像合成部12とを備える構成を示した。しかしながら、本発明は、このような形態に限定されるものではなく、例えば、上記4つの機能部の全てをHMD側が有し、HMD側だけで全ての処理が実行されるように構成してもよい。
11 画像処理部
12 画像合成部
13 表示部
Claims (10)
- 画像を撮像する撮像部と、使用者に表示すべき表示画像を表示する表示部と、を備え、前記使用者の頭部に装着されて使用される画像表示装置に接続された情報処理装置であって、
前記撮像部の撮像光学系に係る情報と前記表示部の表示光学系に係る情報とに基づいて、前記撮像された画像に対して、前記撮像光学系による画像の歪みの補正、及び、前記表示光学系による画像の歪みの補正の両方が段階的に実行された場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出す切り出し手段と、
前記切り出された画像に対して、前記撮像光学系による画像の歪みを補正する処理と前記表示光学系による画像の歪みを補正する処理を段階的に実行する補正手段と、
を有することを特徴とする情報処理装置。 - 前記撮像光学系に係る情報と前記表示光学系に係る情報とに基づいて、前記撮像光学系に係る情報と前記表示光学系に共通した情報を演算した結果として、前記変化の情報を取得する取得手段を更に有し、
前記補正手段は、前記取得手段により取得された前記変化の情報に基づいて画像の歪みを補正することを特徴とする請求項1に記載の情報処理装置。 - 画像を撮像する撮像部と、使用者に表示すべき表示画像を表示する表示部と、を備え、前記使用者の頭部に装着されて使用される画像表示装置に接続された情報処理装置であって、
前記撮像部の撮像光学系に係る情報と前記表示部の表示光学系に係る情報との少なくとも一方に基づいて、前記撮像光学系と前記表示光学系との少なくとも一方による前記撮像された画像の歪みを補正した場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出す切り出し手段と、
前記切り出された画像に対して、前記撮像光学系と前記表示光学系との少なくとも一方による歪みを補正する処理を実行する補正手段と、
前記撮像光学系と前記表示光学系における解像度、画角、および注目画素位置における補正量とに基づいて、前記撮像光学系に係る情報と前記表示光学系に共通した情報を演算した結果として、前記変化の情報を取得する取得手段と、を有し、
前記補正手段は、前記取得手段により取得された前記変化の情報に基づいて画像の歪みを補正することを特徴とする情報処理装置。 - 前記撮像された画像の画角は、前記表示部に表示する表示画像の画角よりも大きいことを特徴とする請求項1から3のいずれか1項に記載の情報処理装置。
- 前記撮像部の撮像光学系に係る情報と前記表示部の表示光学系に係る情報とを保持する保持手段を更に有することを特徴する請求項1から4のいずれか1項に記載の情報処理装置。
- 前記切り出された画像に対して、まず前記補正手段によって前記撮像光学系による歪みを補正した画像に、CGデータを重畳した合成画像を生成する合成手段を更に備え、
前記補正手段は、前記合成手段によって生成された合成画像に対し、さらに前記表示光学系による歪みを補正するものであって、
前記表示部には、前記補正された合成画像が表示されることを特徴する請求項1から5のいずれか1項に記載の情報処理装置。 - 画像を撮像する撮像部と、
前記撮像部の撮像光学系に係る情報と表示部の表示光学系に係る情報とに基づいて、前記撮像された画像に対して、前記撮像光学系による画像の歪みの補正、及び、前記表示光学系による画像の歪みの補正の両方が段階的に実行された場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出す切り出し手段と、
前記切り出された画像に対して、前記撮像光学系による画像の歪みを補正する処理と前記表示光学系による画像の歪みを補正する処理を段階的に実行する補正手段と、
前記補正された画像に基づいて、使用者に表示すべき表示画像を表示する表示部と、を有し、前記使用者の頭部に装着されて使用されることを特徴とする画像表示装置。 - 画像を撮像する撮像部と、
前記撮像部の撮像光学系に係る情報と表示部の表示光学系に係る情報とに基づいて、前記撮像された画像に対して、前記撮像光学系による画像の歪みの補正、及び、前記表示光学系による画像の歪みの補正の両方が段階的に実行された場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出す切り出し手段と、
前記切り出された画像に対して、前記撮像光学系による画像の歪みを補正する処理と前記表示光学系による画像の歪みを補正する処理を段階的に実行する補正手段と、
前記補正された画像に基づいて、使用者に表示すべき表示画像を、前記使用者の頭部に装着されて使用される画像表示装置に表示する表示部と、を有することを特徴とする画像表示システム。 - 画像を撮像する撮像部と、使用者に表示すべき表示画像を表示する表示部と、を備え、前記使用者の頭部に装着されて使用される画像表示装置に接続された情報処理装置における情報処理方法であって、
前記撮像部の撮像光学系に係る情報と前記表示部の表示光学系に係る情報とに基づいて、前記撮像された画像に対して、前記撮像光学系による画像の歪みの補正、及び、前記表示光学系による画像の歪みの補正の両方が段階的に実行された場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出すステップと、
前記切り出された画像に対して、前記撮像光学系による画像の歪みを補正する処理と前記表示光学系による画像の歪みを補正する処理を段階的に実行する補正ステップと、
を有することを特徴とする情報処理方法。 - 画像を撮像する撮像部と、使用者に表示すべき表示画像を表示する表示部と、を備え、前記使用者の頭部に装着されて使用される画像表示装置に接続された情報処理装置における情報処理方法であって、
前記撮像部の撮像光学系に係る情報と前記表示部の表示光学系に係る情報との少なくとも一方に基づいて、前記撮像光学系と前記表示光学系との少なくとも一方による前記撮像された画像の歪みを補正した場合に、前記撮像された画像に生じる変化の情報に基づいて、前記撮像された画像の一部を切り出すステップと、
前記切り出された画像に対して、前記撮像光学系と前記表示光学系との少なくとも一方による歪みを補正する処理を実行するステップと、
前記撮像光学系と前記表示光学系における解像度、画角、および注目画素位置における補正量とに基づいて、前記撮像光学系に係る情報と前記表示光学系に共通した情報を演算した結果として、前記変化の情報を取得する取得ステップと、を有し、
前記補正する処理を実行するステップでは、前記取得ステップで取得された前記変化の情報に基づいて画像の歪みを補正することを特徴とする情報処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016075487A JP6711670B2 (ja) | 2016-04-04 | 2016-04-04 | 情報処理装置、画像表示装置、画像表示システム、および情報処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016075487A JP6711670B2 (ja) | 2016-04-04 | 2016-04-04 | 情報処理装置、画像表示装置、画像表示システム、および情報処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017188757A JP2017188757A (ja) | 2017-10-12 |
| JP2017188757A5 JP2017188757A5 (ja) | 2019-05-09 |
| JP6711670B2 true JP6711670B2 (ja) | 2020-06-17 |
Family
ID=60046620
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016075487A Expired - Fee Related JP6711670B2 (ja) | 2016-04-04 | 2016-04-04 | 情報処理装置、画像表示装置、画像表示システム、および情報処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6711670B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11126001B2 (en) | 2019-03-29 | 2021-09-21 | Sony Interactive Entertainment Inc. | Image generating apparatus, head-mounted display, content processing system and image displaying method |
| JP7365183B2 (ja) * | 2019-03-29 | 2023-10-19 | 株式会社ソニー・インタラクティブエンタテインメント | 画像生成装置、ヘッドマウントディスプレイ、コンテンツ処理システム、および画像表示方法 |
| JP7429515B2 (ja) * | 2019-03-29 | 2024-02-08 | 株式会社ソニー・インタラクティブエンタテインメント | 画像処理装置、ヘッドマウントディスプレイ、および画像表示方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4693552B2 (ja) * | 2005-08-30 | 2011-06-01 | キヤノン株式会社 | 表示装置、制御装置、及び制御方法 |
| JP5074777B2 (ja) * | 2006-05-22 | 2012-11-14 | キヤノン株式会社 | 撮像機能付表示装置、画像処理装置、画像処理方法、および、画像表示システム |
| JP5231799B2 (ja) * | 2007-12-25 | 2013-07-10 | キヤノン株式会社 | 制御装置、表示装置及びそれらの制御方法、複合現実システム、及びコンピュータプログラム |
| JP2011203446A (ja) * | 2010-03-25 | 2011-10-13 | Fujifilm Corp | ヘッドマウントディスプレイ装置 |
| JP5733088B2 (ja) * | 2011-08-01 | 2015-06-10 | 大日本印刷株式会社 | 動画提示装置 |
-
2016
- 2016-04-04 JP JP2016075487A patent/JP6711670B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017188757A (ja) | 2017-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5917054B2 (ja) | 撮像装置、画像データ処理方法、およびプログラム | |
| JP5388534B2 (ja) | 画像処理装置およびその方法、頭部装着型ディスプレイ、プログラム、記録媒体 | |
| JP6100089B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| US9313411B2 (en) | Camera, distortion correction device and distortion correction method | |
| WO2012114639A1 (ja) | オブジェクト表示装置、オブジェクト表示方法及びオブジェクト表示プログラム | |
| JP5984493B2 (ja) | 画像処理装置、画像処理方法、撮像装置およびプログラム | |
| JP6478511B2 (ja) | 画像処理方法、画像処理装置、複眼撮像装置、画像処理プログラム、および、記憶媒体 | |
| JP2016171463A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP6711670B2 (ja) | 情報処理装置、画像表示装置、画像表示システム、および情報処理方法 | |
| JP6594170B2 (ja) | 画像処理装置、画像処理方法、画像投影システムおよびプログラム | |
| US9143756B2 (en) | Camera module, photographing method, and electronic apparatus | |
| JP6971590B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JPWO2018189880A1 (ja) | 情報処理装置、情報処理システム、および画像処理方法 | |
| JP6904684B2 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP6862210B2 (ja) | 画像処理装置、画像処理システム、画像処理方法及びプログラム | |
| JP6732440B2 (ja) | 画像処理装置、画像処理方法、及びそのプログラム | |
| JP5535099B2 (ja) | カメラモジュール及び画像記録方法 | |
| JP7053434B2 (ja) | 画像処理装置および画像処理方法 | |
| US10616504B2 (en) | Information processing device, image display device, image display system, and information processing method | |
| WO2018084051A1 (ja) | 情報処理装置、ヘッドマウントディスプレイ、情報処理システム、および情報処理方法 | |
| JP5505072B2 (ja) | 画像データ処理装置および画像データ処理方法 | |
| JP2014049895A (ja) | 画像処理方法 | |
| JP6433154B2 (ja) | 画像処理装置および撮像装置 | |
| JP2024084218A (ja) | 画像処理装置、画像処理方法 | |
| JP6622537B2 (ja) | 画像処理装置、画像処理システム、及び画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190319 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200428 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200528 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6711670 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |