JP6707542B2 - 物体の細長い関心領域を撮像するための撮像システム - Google Patents
物体の細長い関心領域を撮像するための撮像システム Download PDFInfo
- Publication number
- JP6707542B2 JP6707542B2 JP2017531993A JP2017531993A JP6707542B2 JP 6707542 B2 JP6707542 B2 JP 6707542B2 JP 2017531993 A JP2017531993 A JP 2017531993A JP 2017531993 A JP2017531993 A JP 2017531993A JP 6707542 B2 JP6707542 B2 JP 6707542B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- image data
- data
- imaging system
- interest
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 139
- 238000004590 computer program Methods 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 12
- 230000003287 optical effect Effects 0.000 claims description 4
- 230000004927 fusion Effects 0.000 claims description 2
- 230000001419 dependent effect Effects 0.000 description 5
- 210000003484 anatomy Anatomy 0.000 description 3
- 210000000702 aorta abdominal Anatomy 0.000 description 2
- 210000004072 lung Anatomy 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 230000003936 working memory Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 238000013481 data capture Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000013152 interventional procedure Methods 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002195 synergetic effect Effects 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/504—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of blood vessels, e.g. by angiography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5205—Devices using data or image processing specially adapted for radiation diagnosis involving processing of raw data to produce diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5229—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image
- A61B6/5235—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image combining images from the same or different ionising radiation imaging techniques, e.g. PET and CT
- A61B6/5241—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image combining images from the same or different ionising radiation imaging techniques, e.g. PET and CT combining overlapping images of the same imaging modality, e.g. by stitching
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Vascular Medicine (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
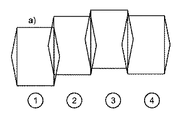
異なる第1及び第2の2D画像データを2D画像データに縫い合わせ、その後2D画像データを3Dボリュームデータに再構成すること、又は
異なる第1及び第2の2D画像データを異なる第1及び第2の3Dボリュームデータに再構成し、その後異なる第1及び第2の3Dボリュームデータを3Dボリュームデータに縫い合わせることと理解され得る。
一例では、第1の撮像パラメータは第1のアイソセンター位置である。第2の撮像パラメータは第2のアイソセンター位置である。第1及び第2のアイソセンター位置は、第1及び第2の回転Cアームスキャンにおけるアイソセンターの位置を表す。スキャンの間、第1及び第2のアイソセンターは、撮像システムの走査方向とは異なる方向において互いに対して変位され、画像取得位置が関心領域に適合させられてもよい。走査方向は、例えば脊柱に沿った方向であってもよい。第1及び第2のアイソセンター位置は、撮像システムの走査方向に対して垂直又は異なる方向において互いに対して変位され得る。走査方向は、細長い関心領域の長手方向に沿って伸びてもよい。
第1のアイソセンター位置と第2のアイソセンター位置とは、
物体支持体の高さ、
物体の長手方向に対する物体支持体の長手方向位置、
物体の横方向に対する物体支持体の横方向位置、
取得ユニットのCアームの位置、又は
これらの組み合わせからなる群のうちの少なくとも1つによって異なり得る。
Cアーム取得ユニットの第1の撮像パラメータを用いた撮像対象の第1の画像データを取得するステップ。
Cアーム取得ユニットの第2の撮像パラメータを用いた撮像対象の第2の画像データを取得するステップ。ここで、第2の幾何学的撮像パラメータは、ボリュームデータの撮像対象の細長い関心領域との位置合わせのために物体固有データに基づき定められる。
第1の画像データと第2の画像データとをボリュームデータに結合するステップ。
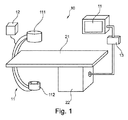
− 第1のステップS1において、Cアーム取得ユニット11の第1の幾何学的撮像パラメータを用いた回転スキャンで撮像対象の第1の画像データを取得する。
− 第2のステップS2において、Cアーム取得ユニット11の第2の幾何学的撮像パラメータを用いた回転スキャンで撮像対象の第2の画像データを取得する。ここで、少なくとも第2の異なる撮像パラメータは、撮像対象の細長い関心領域との位置合わせのために物体固有データに基づき定められる。
− 第3のステップS3において、第1の画像データと第2の画像データとをボリュームデータに合成する。
Claims (14)
- 物体の細長い関心領域を撮像するための撮像システムであって、
Cアーム取得ユニットと、
処理ユニットとを含み、
前記取得ユニットは、第1の幾何学的撮像パラメータを用いた第1の回転スキャンで撮像対象の前記物体の第1の画像データを取得し、
前記取得ユニットは、前記第1の幾何学的撮像パラメータとは異なる第2の幾何学的撮像パラメータを用いて第2の回転スキャンで撮像対象の前記物体の第2の画像データを取得し、
前記処理ユニットは、前記第1の画像データ及び前記第2の画像データを結合してボリュームデータを生成し、
前記第2の幾何学的撮像パラメータは、前記ボリュームデータを撮像対象の前記物体の前記細長い関心領域と位置合わせするために、物体固有データに基づき定義可能である、撮像システム。 - 前記第1の幾何学的撮像パラメータは、前記第1の回転スキャンにおけるアイソセンターの第1のアイソセンター位置を含み、前記第2の幾何学的撮像パラメータは、前記第2の回転スキャンにおけるアイソセンターの第2のアイソセンター位置を含み、前記第1及び第2のアイソセンター位置は、前記撮像システムの走査方向とは異なる方向において互いに対して変位され、前記走査方向は、前記細長い関心領域の長手方向に沿って伸びる、請求項1に記載の撮像システム。
- 前記第1のアイソセンター位置と前記第2のアイソセンター位置とは、
物体支持体の高さ、
前記物体の長手方向に対する物体支持体の長手方向位置、
前記物体の横方向に対する前記物体支持体の横方向位置、又は
前記取得ユニットのCアームの位置からなる群のうちの少なくとも1つによって異なる、請求項2に記載の撮像システム。 - 前記第1の幾何学的撮像パラメータは、前記Cアーム取得ユニットの回転面の第1の向きであり、前記第2の幾何学的撮像パラメータは、前記回転面の第2の向きであり、前記第1及び第2の向きは、画像取得の向きを前記関心領域に適合させるよう、互いに対して回転される、請求項1に記載の撮像システム。
- 前記第1の幾何学的撮像パラメータは、前記取得ユニットのX線検出器の第1の向きであり、前記第2の幾何学的撮像パラメータは、前記X線検出器の第2の向きであり、前記第1及び第2の向きは、画像取得の向きを前記関心領域に適合させるよう、互いに対して回転される、請求項1に記載の撮像システム。
- 前記X線検出器は、第1及び第2の向きとしてランドスケープ又はポートレートの間で回転する、請求項5に記載の撮像システム。
- 前記ボリュームデータへの結合は、第1の画像データを第1のサブボリュームデータに変換し、第2の画像データを第2のサブボリュームデータに変換し、前記第1のサブボリュームデータと前記第2のサブボリュームデータとをボリュームデータに融合することによって行われる、請求項1乃至6のいずれか一項に記載の撮像システム。
- 前記ボリュームデータへの結合は、第1及び第2の画像データを拡張画像データへ融合し、前記拡張画像データをボリュームデータに変換することによって行われる、請求項1乃至6のいずれか一項に記載の撮像システム。
- 前記第1及び第2の画像データの拡張画像データへの融合は、画像レジストレーションに基づく、請求項8に記載の撮像システム。
- 前記処理ユニットは、さらに、前記第1の画像データ、前記第2の画像データ及び/又は前記ボリュームデータを、物体固有データを用いて結合する、請求項1乃至9のいずれか一項に記載の撮像システム。
- 前記物体固有データは、プリインターベンションMR/CTデータセット、光学カメラシステムによって生成される表面モデル、CTスキャノグラムモードで取得されるX線投影セット、又はこれらの組み合わせからなる群のうちの少なくとも1つである、請求項10に記載の撮像システム。
- 物体の細長い関心領域を撮像するための撮像方法であって、
第1の回転スキャンにおいて、Cアーム取得ユニットの第1の撮像パラメータを用いて撮像対象の前記物体の第1の画像データを取得するステップと、
第2の回転スキャンにおいて、前記Cアーム取得ユニットの、前記第1の撮像パラメータとは異なる第2の撮像パラメータを用いて撮像対象の前記物体の第2の画像データを取得するステップと、
前記第1の画像データと前記第2の画像データとを結合してボリュームデータを生成するステップとを含み、
さらに、前記ボリュームデータを撮像対象の前記物体の前記細長い関心領域と位置合わせさせるために、物体固有データに基づき、前記第2の撮像パラメータを定義するステップを含む、方法。 - 処理ユニットによって実行されると、請求項12に記載の方法のステップを実行するシステムを制御するためのコンピュータプログラム。
- 請求項13に記載のコンピュータプログラムが記憶されたコンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14198831 | 2014-12-18 | ||
| EP14198831.1 | 2014-12-18 | ||
| PCT/EP2015/080272 WO2016097174A1 (en) | 2014-12-18 | 2015-12-17 | Imaging system for imaging an elongated region of interest of an object |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017537727A JP2017537727A (ja) | 2017-12-21 |
| JP2017537727A5 JP2017537727A5 (ja) | 2020-04-16 |
| JP6707542B2 true JP6707542B2 (ja) | 2020-06-10 |
Family
ID=52278376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017531993A Active JP6707542B2 (ja) | 2014-12-18 | 2015-12-17 | 物体の細長い関心領域を撮像するための撮像システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10561383B2 (ja) |
| EP (1) | EP3232933B1 (ja) |
| JP (1) | JP6707542B2 (ja) |
| CN (1) | CN107106099B (ja) |
| WO (1) | WO2016097174A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BR112018008899A8 (pt) * | 2015-11-04 | 2019-02-26 | Koninklijke Philips Nv | dispositivo para imageamento de um objeto, sistema para imageamento de um objeto, método para imageamento de um objeto, elemento de programa de computador, e mídia legível por computador |
| EP3518767B1 (en) | 2016-09-29 | 2024-02-28 | Koninklijke Philips N.V. | Imaging system with dynamic beam size limitation |
| JP7098338B2 (ja) * | 2017-01-25 | 2022-07-11 | キヤノンメディカルシステムズ株式会社 | X線ct装置及び撮影管理装置 |
| US11317886B2 (en) * | 2017-01-25 | 2022-05-03 | Canon Medical Systems Corporation | X-ray CT apparatus and imaging management apparatus |
| JP6658578B2 (ja) * | 2017-01-30 | 2020-03-04 | 株式会社島津製作所 | X線撮影装置 |
| US10799183B2 (en) * | 2018-11-07 | 2020-10-13 | General Electric Company | Methods and systems for whole body imaging |
| DE202019003376U1 (de) | 2019-03-21 | 2019-09-13 | Ziehm Imaging Gmbh | Röntgensystem zur iterativen Bestimmung einer optimalen Koordinatentransformation zwischen überlappenden Volumina, die aus Volumendatensätzen von diskret abgetasteten Objektbereichen rekonstruiert wurden |
| CN112472110A (zh) * | 2019-09-12 | 2021-03-12 | 通用电气精准医疗有限责任公司 | X射线成像系统及方法 |
| CN115024736A (zh) * | 2021-03-04 | 2022-09-09 | 锐珂(上海)医疗器材有限公司 | 基于数字射线照相术的大尺寸成像方法和装置 |
| CN117169255A (zh) * | 2022-09-13 | 2023-12-05 | 埃尔西斯株式会社 | 用于检测被摄体内部构件的缺陷的x射线影像生成方法 |
| DE102022210292A1 (de) | 2022-09-28 | 2024-03-28 | Siemens Healthcare Gmbh | Computerimplementiertes Verfahren zum Betrieb einer Röntgeneinrichtung, Röntgeneinrichtung, Computerprogramm und elektronisch lesbarer Datenträger |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19959092A1 (de) * | 1999-12-08 | 2001-06-13 | Philips Corp Intellectual Pty | Verfahren zur Kombination von Rekonstruktionsbildern |
| US20020159564A1 (en) | 2001-04-30 | 2002-10-31 | Eastman Kodak Company | Mothod for acquiring a radiation image of a long body part using direct digital x-ray detectors |
| DE10211016A1 (de) * | 2002-03-13 | 2003-09-25 | Philips Intellectual Property | Röntgengerät mit lageveränderlichem Röntgendetektor |
| CN101090669A (zh) * | 2004-12-28 | 2007-12-19 | 皇家飞利浦电子股份有限公司 | 具有旋转c形臂的医学三维x射线成像设备 |
| US7522701B2 (en) | 2005-12-20 | 2009-04-21 | General Electric Company | System and method for image composition using position sensors |
| DE102006002907B4 (de) | 2006-01-20 | 2011-06-16 | Siemens Ag | Verfahren und Vorrichtung zur Rekonstruktion eines dreidimensionalen Bildvolumens aus zweidimensionalen Projektionsbildern |
| JP2010500146A (ja) * | 2006-08-14 | 2010-01-07 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 放射線検出器の回転を伴う画像スティッチングのための画像収集 |
| WO2008038283A2 (en) * | 2006-09-25 | 2008-04-03 | Mazor Surgical Technologies Ltd. | C-arm computerized tomography system |
| DE102007030962A1 (de) * | 2007-07-04 | 2009-01-15 | Siemens Ag | Verfahren zur Gewinnung von Messdaten |
| US8401267B2 (en) * | 2008-04-30 | 2013-03-19 | J. Morita Manufacturing Corporation | Medical X-ray CT imaging apparatus |
| JP4516626B1 (ja) * | 2009-09-28 | 2010-08-04 | 株式会社吉田製作所 | 歯科用x線撮影装置 |
| DE102009047867B4 (de) | 2009-09-30 | 2016-10-06 | Siemens Healthcare Gmbh | Verfahren und Vorrichtung zur Korrektur von trunkierten Projektionsdaten |
| DE102010033116A1 (de) * | 2010-08-02 | 2012-02-02 | Siemens Aktiengesellschaft | Verfahren zur Erzeugung von 3D-Bilddaten |
| DE102011006991B4 (de) | 2011-04-07 | 2018-04-05 | Siemens Healthcare Gmbh | Röntgenverfahren und Röntgenvorrichtung zum Zusammenfügen von Röntgenaufnahmen und Ermitteln dreidimensionaler Volumendaten |
| CN103945764B (zh) * | 2011-11-11 | 2016-11-16 | 皇家飞利浦有限公司 | 具有扩展的视场的c型臂系统 |
| DE102011089178B4 (de) | 2011-12-20 | 2017-12-28 | Siemens Healthcare Gmbh | Verfahren zur Aufnahme eines Projektionsbildes und Bildgebungseinrichtung |
| DE102012202360B4 (de) * | 2012-02-16 | 2023-09-21 | Siemens Healthcare Gmbh | Verfahren zur Bildakquisition eines zweidimensionalen projektiven Röntgenbildes mit einem C-Bogensystem und C-Bogensystem |
| DE102012216652B4 (de) | 2012-09-18 | 2023-01-26 | Siemens Healthcare Gmbh | Angiographisches Untersuchungsverfahren |
| EP2981813B1 (en) * | 2013-04-04 | 2019-03-27 | Illinois Tool Works Inc. | Helical computed tomography |
-
2015
- 2015-12-17 EP EP15813062.5A patent/EP3232933B1/en active Active
- 2015-12-17 US US15/535,667 patent/US10561383B2/en active Active
- 2015-12-17 CN CN201580068801.4A patent/CN107106099B/zh active Active
- 2015-12-17 WO PCT/EP2015/080272 patent/WO2016097174A1/en active Application Filing
- 2015-12-17 JP JP2017531993A patent/JP6707542B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3232933A1 (en) | 2017-10-25 |
| WO2016097174A1 (en) | 2016-06-23 |
| CN107106099B (zh) | 2021-05-28 |
| JP2017537727A (ja) | 2017-12-21 |
| US10561383B2 (en) | 2020-02-18 |
| US20170340299A1 (en) | 2017-11-30 |
| EP3232933B1 (en) | 2022-07-20 |
| CN107106099A (zh) | 2017-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6707542B2 (ja) | 物体の細長い関心領域を撮像するための撮像システム | |
| JP6534998B2 (ja) | 医療画像を表示する方法及び装置 | |
| ES2716837T3 (es) | Detección automática de implantes a partir de artefactos de imagen | |
| JP6205078B2 (ja) | 椎骨レベル用イメージングシステム | |
| US20170372477A1 (en) | Method and System for Tomosynthesis Imaging | |
| US9262830B2 (en) | 2D/3D image registration | |
| EP4072423B1 (en) | Field of view matching for mobile 3d imaging | |
| JP2017537727A5 (ja) | ||
| US20120063565A1 (en) | Method for collimating to an off-center examination sub-object | |
| JP2011031039A (ja) | 傾斜画像スキャン方法、再構成方法及びその装置 | |
| US20070237287A1 (en) | Ct scanner with automatic determination of volume of interest | |
| CN109425843A (zh) | 用于磁共振成像的方法和系统 | |
| KR101525040B1 (ko) | 시술 전 영상의 촬영 범위를 결정하기 위한 레퍼런스 영상 생성 방법 및 그 장치 | |
| JP6824641B2 (ja) | X線ct装置 | |
| US11123025B2 (en) | Iso-centering in C-arm computer tomography | |
| US20240221247A1 (en) | System and method for 3d imaging reconstruction using dual-domain neural network | |
| EP4312188A1 (en) | Combined optical and non-optical 3d reconstruction | |
| JP6760510B2 (ja) | 放射線撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191002 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191002 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191125 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20191202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191210 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6707542 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |