JP6690952B2 - 車両走行制御システム、及び車両走行制御方法 - Google Patents
車両走行制御システム、及び車両走行制御方法 Download PDFInfo
- Publication number
- JP6690952B2 JP6690952B2 JP2016011637A JP2016011637A JP6690952B2 JP 6690952 B2 JP6690952 B2 JP 6690952B2 JP 2016011637 A JP2016011637 A JP 2016011637A JP 2016011637 A JP2016011637 A JP 2016011637A JP 6690952 B2 JP6690952 B2 JP 6690952B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- fusion
- driver
- sensor
- external environment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 71
- 230000004927 fusion Effects 0.000 claims description 226
- 238000001514 detection method Methods 0.000 claims description 55
- 230000008859 change Effects 0.000 claims description 53
- 230000004044 response Effects 0.000 claims description 9
- 230000008569 process Effects 0.000 description 58
- 230000000295 complement effect Effects 0.000 description 50
- 238000010586 diagram Methods 0.000 description 42
- 238000012545 processing Methods 0.000 description 25
- 238000011156 evaluation Methods 0.000 description 18
- 230000033001 locomotion Effects 0.000 description 16
- 230000006854 communication Effects 0.000 description 14
- 230000007423 decrease Effects 0.000 description 14
- 238000004891 communication Methods 0.000 description 13
- 230000010365 information processing Effects 0.000 description 12
- 230000000007 visual effect Effects 0.000 description 12
- 238000012790 confirmation Methods 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 239000007787 solid Substances 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 239000013589 supplement Substances 0.000 description 3
- 230000000576 supplementary effect Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 230000006996 mental state Effects 0.000 description 2
- 238000013508 migration Methods 0.000 description 2
- 230000005012 migration Effects 0.000 description 2
- 102100034112 Alkyldihydroxyacetonephosphate synthase, peroxisomal Human genes 0.000 description 1
- 101000799143 Homo sapiens Alkyldihydroxyacetonephosphate synthase, peroxisomal Proteins 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000000848 angular dependent Auger electron spectroscopy Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






















Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Instrument Panels (AREA)
- Traffic Control Systems (AREA)
Description
200 ECU
201 CPU
202 メモリ
203 通信部
204 記憶部
205 地図
206 データバス
210 MPU
211 ロケータ
212 高精度地図
221 ミリ波レーダー
222 ステレオカメラ
223 サラウンドビューカメラ
224 無線通信部
231 クラウド
232 データセンタ
233 車両
234 路側機
241 無線ネットワーク
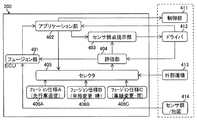
401 フュージョン部
402 アプリケーション部
403 センサ弱点提示部
404 評価部
405 セレクタ
406 フュージョン仕様
411 制御部
412 ドライバ
413 外部環境
Claims (10)
- 車両の自動走行を実現する車両走行制御システムであって、
前記車両は、前記車両の外部の状況を検出するセンサを複数有し、
前記車両走行制御システムは、
プロセッサ及びメモリを有し、
前記メモリは、前記複数のセンサの検出結果をフュージョンする仕様であって、前記車両の外部環境に対応する複数のフュージョン仕様を記憶し、
前記プロセッサは、
前記メモリに記憶された複数のフュージョン仕様から前記車両の外部環境に対応する一つのフュージョン仕様を選択し、
前記選択したフュージョン仕様において前記外部環境が原因で前記センサの認識精度が低下する領域を前記選択したフュージョン仕様の弱点領域としてドライバに提示し、
前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を制御し、
前記選択したフュージョン仕様の弱点領域の視認を前記ドライバに促す刺激を前記ドライバに与え、
前記ドライバが前記刺激に対して適切に応答したか否かを判定し、
前記判定の結果に基づいて、前記選択したフュージョン仕様を前記複数のセンサの検出結果のフュージョンに適用するか否かを判定することを特徴とする車両走行制御システム。 - 請求項1に記載の車両走行制御システムであって、
前記プロセッサは、前記ドライバの応答を、車内の状況を検出するセンサ、及び前記ドライバからの入力の少なくとも一方に基づいて検出することを特徴とする車両走行制御システム。 - 請求項1に記載の車両走行制御システムであって、
前記刺激は、前記選択したフュージョン仕様の弱点領域の視認を前記ドライバに促す旨の画像、音声、及び接触動作の少なくとも一つであることを特徴とする車両走行制御システム。 - 車両の自動走行を実現する車両走行制御システムであって、
前記車両は、前記車両の外部の状況を検出するセンサを複数有し、
前記車両走行制御システムは、
プロセッサ及びメモリを有し、
前記メモリは、前記複数のセンサの検出結果をフュージョンする仕様であって、前記車両の走行の制御のための複数の種類のアプリケーションに対応し、かつ少なくとも一つの外部環境に対応する複数のフュージョン仕様を記憶し、
前記プロセッサは、
前記複数の種類のアプリケーションを実行可能であり、
前記メモリに記憶された複数のフュージョン仕様から実行するアプリケーションに対応し、前記外部環境に対応するフュージョン仕様を選択し、
前記選択したフュージョン仕様において前記外部環境が原因で前記センサの認識精度が低下する領域を前記選択したフュージョン仕様の弱点領域としてドライバに提示し、
前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を実現し、
前記実行するアプリケーションが変更されたことを契機として、前記変更後のアプリケーションに対応し、かつ前記外部環境に対応するフュージョン仕様を選択し、
前記選択したフュージョン仕様の弱点領域を前記ドライバに提示し、
前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を実現することを特徴とする車両走行制御システム。 - 請求項4に記載の車両走行制御システムであって、
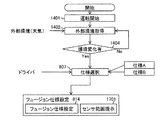
前記変更後のアプリケーションは、前記車両が車線を変更するための車線変更アプリケーションであり、
前記プロセッサは、ドライバが前記提示されたフュージョン仕様の弱点領域を確認し、車線が変更可能である旨の入力を受け付けた場合、前記車線の変更制御を実施することを特徴とする車両走行制御システム。 - 請求項1又は4に記載の車両走行制御システムであって、
前記プロセッサは、前記外部環境を検出するためのセンサの検出結果、及び前記車両が外部の装置から取得した外部環境を示すデータの少なくとも一つに基づいて、前記外部環境を特定することを特徴とする車両走行制御システム。 - 請求項1又は4に記載の車両走行制御システムであって、
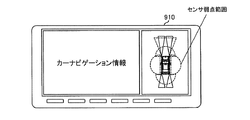
前記プロセッサは、前記選択したフュージョン仕様の弱点領域を、前記車両が有するメータパネル、前記車両が有するカーナビゲーションシステムのディスプレイ、及び前記車両のウィンドウに内蔵された透過型ディスプレイの少なくとも一つに提示することを特徴とする車両走行制御システム。 - 請求項1から請求項7のいずれか一つに記載の車両走行制御システムを有することを特徴とする車両。
- 車両の自動走行を実現する車両走行制御システムにおける前記車両の走行を制御する車両走行制御方法であって、
前記車両は、前記車両の外部の状況を検出するセンサを複数有し、
前記車両走行制御システムは、プロセッサ及びメモリを有し、
前記メモリは、前記複数のセンサの検出結果をフュージョンする仕様であって、前記車両の外部環境に対応する複数のフュージョン仕様を記憶し、
前記車両走行制御方法は、
前記プロセッサが、前記メモリに記憶された複数のフュージョン仕様から前記車両の外部環境に対応する一つのフュージョン仕様を選択し、
前記プロセッサが、前記選択したフュージョン仕様において前記外部環境が原因で前記センサの認識精度が低下する領域を前記選択したフュージョン仕様の弱点領域としてドライバに提示し、
前記プロセッサが、前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を実現し、
前記プロセッサが、前記選択したフュージョン仕様の弱点領域の視認を前記ドライバに促す刺激を前記ドライバに与え、
前記プロセッサが、前記ドライバが前記刺激に対して適切に応答したか否かを判定し、
前記プロセッサが、前記判定の結果に基づいて、前記選択したフュージョン仕様を前記複数のセンサの検出結果のフュージョンに適用するか否かを判定することを特徴とする車両走行制御方法。 - 車両の自動走行を実現する車両走行制御システムにおける前記車両の走行を制御する車両走行制御方法であって、
前記車両は、前記車両の外部の状況を検出するセンサを複数有し、
前記車両走行制御システムは、プロセッサ及びメモリを有し、
前記メモリは、前記複数のセンサの検出結果をフュージョンする仕様であって、前記車両の走行の制御のための複数の種類のアプリケーションに対応し、かつ少なくとも一つの外部環境に対応する複数のフュージョン仕様を記憶し、
前記プロセッサは、
前記複数の種類のアプリケーションを実行可能であり、
前記車両走行制御方法は、
前記プロセッサが、前記メモリに記憶された複数のフュージョン仕様から実行するアプリケーションに対応し、前記外部環境に対応するフュージョン仕様を選択し、
前記プロセッサが、前記選択したフュージョン仕様において前記外部環境が原因で前記センサの認識精度が低下する領域を前記選択したフュージョン仕様の弱点領域としてドライバに提示し、
前記プロセッサが、前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を実現し、
前記プロセッサが、前記実行するアプリケーションが変更されたことを契機として、前記変更後のアプリケーションに対応し、かつ前記外部環境に対応するフュージョン仕様を選択し、
前記プロセッサが、前記選択したフュージョン仕様の弱点領域を前記ドライバに提示し、
前記プロセッサが、前記選択したフュージョン仕様に基づいて、前記複数のセンサの検出結果をフュージョンして、前記車両の外部の状況を認識して、前記車両の自動走行を実現することを特徴とする車両走行制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011637A JP6690952B2 (ja) | 2016-01-25 | 2016-01-25 | 車両走行制御システム、及び車両走行制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011637A JP6690952B2 (ja) | 2016-01-25 | 2016-01-25 | 車両走行制御システム、及び車両走行制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017132285A JP2017132285A (ja) | 2017-08-03 |
| JP6690952B2 true JP6690952B2 (ja) | 2020-04-28 |
Family
ID=59502036
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016011637A Active JP6690952B2 (ja) | 2016-01-25 | 2016-01-25 | 車両走行制御システム、及び車両走行制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6690952B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6256531B2 (ja) * | 2016-06-10 | 2018-01-10 | 三菱電機株式会社 | 物体認識処理装置、物体認識処理方法および自動運転システム |
| WO2019065411A1 (ja) * | 2017-09-29 | 2019-04-04 | 日立オートモティブシステムズ株式会社 | 車両検知システム |
| KR102073861B1 (ko) | 2018-01-17 | 2020-02-05 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| JP7007226B2 (ja) | 2018-04-05 | 2022-01-24 | 日立Astemo株式会社 | 電子制御装置、制御方法 |
| JP2019200461A (ja) * | 2018-05-14 | 2019-11-21 | 株式会社デンソー | 運転支援装置 |
| JP7511471B2 (ja) | 2018-07-02 | 2024-07-05 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置及び情報処理方法、コンピュータプログラム、並びに移動体装置 |
| CN109459742B (zh) * | 2018-10-31 | 2020-09-11 | 广州小鹏汽车科技有限公司 | 基于超声波雷达的异物覆盖处理方法及装置 |
| KR102555916B1 (ko) * | 2018-12-12 | 2023-07-17 | 현대자동차주식회사 | Odm 정보 신뢰성 판단 장치 및 그의 판단 방법과 그를 이용하는 차량 |
| JP2020104547A (ja) | 2018-12-26 | 2020-07-09 | 株式会社日立製作所 | 外界センサの故障検出装置、及び、外界センサの故障検出方法 |
| KR20200102008A (ko) | 2019-01-31 | 2020-08-31 | 삼성전자주식회사 | 서버 및 이의 제어 방법 |
| JP7236897B2 (ja) * | 2019-03-26 | 2023-03-10 | 日産自動車株式会社 | 運転支援方法及び運転支援装置 |
| CN110610326B (zh) * | 2019-09-30 | 2023-04-07 | 广州大道信息科技有限公司 | 一种基于驾驶数据的驾驶管理系统 |
| US20210316755A1 (en) * | 2020-04-09 | 2021-10-14 | Baidu Usa Llc | Method for real-time monitoring of safety redundancy autonomous driving system (ads) operating within predefined risk tolerable boundary |
| CN112639821B (zh) * | 2020-05-11 | 2021-12-28 | 华为技术有限公司 | 一种车辆可行驶区域检测方法、系统以及采用该系统的自动驾驶车辆 |
| JP7432447B2 (ja) * | 2020-06-15 | 2024-02-16 | 日立Astemo株式会社 | センサ認識統合装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003162795A (ja) * | 2001-11-22 | 2003-06-06 | Nec Corp | 気象データを用いたセンサ選択方法とこれを用いた道路交通監視システム |
| JP4823282B2 (ja) * | 2008-09-01 | 2011-11-24 | 富士通テン株式会社 | 周辺監視センサ |
| JP5213063B2 (ja) * | 2009-11-25 | 2013-06-19 | アルパイン株式会社 | 車両表示装置および表示方法 |
-
2016
- 2016-01-25 JP JP2016011637A patent/JP6690952B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017132285A (ja) | 2017-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6690952B2 (ja) | 車両走行制御システム、及び車両走行制御方法 | |
| US10302448B2 (en) | Automobile periphery information display system | |
| US10453344B2 (en) | Information processing apparatus and non-transitory recording medium | |
| JP6325670B2 (ja) | 車線選択装置、車両制御システム及び車線選択方法 | |
| CN110831819B (zh) | 泊车辅助方法以及泊车辅助装置 | |
| EP3632761A1 (en) | Electronic control device, vehicle control method, and vehicle control program | |
| JP6575492B2 (ja) | 自動運転システム | |
| JP6936679B2 (ja) | 情報処理装置およびプログラム | |
| JP2018062237A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6693447B2 (ja) | 走行制御装置 | |
| US20180326998A1 (en) | Stop intention determination apparatus and stop intention determination method | |
| CN111469846A (zh) | 车辆的控制系统、车辆的控制方法以及介质 | |
| CN110198875B (zh) | 对驾驶员辅助系统的改进或与之相关的改进 | |
| JP2020004333A (ja) | 車両制御装置 | |
| JPWO2013153660A1 (ja) | 運転支援装置 | |
| JP2016224553A (ja) | 車両用交通情報表示システム | |
| KR20210063893A (ko) | 차로 변경 보조 장치, 그를 포함한 시스템 및 그 방법 | |
| JP7225297B2 (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| JP2018169945A (ja) | 運転支援装置、運転支援方法及び運転支援プログラム | |
| JP2022011933A (ja) | 判定装置及びプログラム | |
| JP2022041287A (ja) | 車載表示制御装置、車載表示装置、表示制御方法及び表示制御プログラム | |
| JP2019148900A (ja) | 車両用制御装置、車両及び経路案内装置 | |
| JP2017004339A (ja) | 車両用運転者支援装置 | |
| US11524681B2 (en) | Control apparatus for vehicle, control method for vehicle, and computer-read able recording medium | |
| JP2019096137A (ja) | 信号機認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200317 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200409 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6690952 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |