JP6628131B2 - 把持装置とこれを用いた把持方法 - Google Patents
把持装置とこれを用いた把持方法 Download PDFInfo
- Publication number
- JP6628131B2 JP6628131B2 JP2015208803A JP2015208803A JP6628131B2 JP 6628131 B2 JP6628131 B2 JP 6628131B2 JP 2015208803 A JP2015208803 A JP 2015208803A JP 2015208803 A JP2015208803 A JP 2015208803A JP 6628131 B2 JP6628131 B2 JP 6628131B2
- Authority
- JP
- Japan
- Prior art keywords
- gripping
- bag
- work
- granules
- core member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 19
- 239000008187 granular material Substances 0.000 claims description 139
- 238000013459 approach Methods 0.000 claims description 12
- 230000006837 decompression Effects 0.000 claims description 11
- 238000012546 transfer Methods 0.000 description 17
- 235000013601 eggs Nutrition 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 230000009467 reduction Effects 0.000 description 10
- 239000011324 bead Substances 0.000 description 8
- 235000013339 cereals Nutrition 0.000 description 7
- 239000006260 foam Substances 0.000 description 7
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 6
- 239000002245 particle Substances 0.000 description 6
- 230000032258 transport Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 239000011521 glass Substances 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 241000533293 Sesbania emerus Species 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 244000075850 Avena orientalis Species 0.000 description 1
- 235000007319 Avena orientalis Nutrition 0.000 description 1
- 229920002261 Corn starch Polymers 0.000 description 1
- 240000008620 Fagopyrum esculentum Species 0.000 description 1
- 235000009419 Fagopyrum esculentum Nutrition 0.000 description 1
- 244000043261 Hevea brasiliensis Species 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 244000046052 Phaseolus vulgaris Species 0.000 description 1
- 235000010627 Phaseolus vulgaris Nutrition 0.000 description 1
- 240000008042 Zea mays Species 0.000 description 1
- 235000005824 Zea mays ssp. parviglumis Nutrition 0.000 description 1
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 235000013527 bean curd Nutrition 0.000 description 1
- 235000013605 boiled eggs Nutrition 0.000 description 1
- QXJJQWWVWRCVQT-UHFFFAOYSA-K calcium;sodium;phosphate Chemical compound [Na+].[Ca+2].[O-]P([O-])([O-])=O QXJJQWWVWRCVQT-UHFFFAOYSA-K 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 235000005822 corn Nutrition 0.000 description 1
- 239000008120 corn starch Substances 0.000 description 1
- 229940099112 cornstarch Drugs 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 239000002923 metal particle Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 239000012508 resin bead Substances 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 150000003839 salts Chemical class 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
- 239000002759 woven fabric Substances 0.000 description 1
Images






Landscapes
- Manipulator (AREA)
Description
また、中空バッグをワークに押し付けて嵌合させる際に、内部の粒体が圧縮されて粒体間に摩擦力が生じると粒体の移動抵抗がワークに作用し、不均一な外力で壊れやすいワーク(例えば卵や豆腐)を損傷させる可能性があった。
前記受圧面の中心部に固定された中子部材と、
前記受圧面に前記中子部材を囲んで取り付けられ、気密性を有しかつ変形可能な中空の把持バッグと、
前記把持バッグの内部に空間を残して流動可能に収容された粒体と、
前記把持バッグの内部を減圧して収縮させ、かつ大気圧に戻すことができる減圧装置と、を備え、
前記中子部材は、前記把持バッグ内に突出しており、
前記粒体は、ワークの少なくとも一部を囲む総容積を占め、
前記中子部材は、内圧で膨張可能な中空弾性バッグであり、
さらに、前記中子部材の内部を加圧しかつ大気圧に戻すことができる加圧装置を備える、把持装置が提供される。
前記中空粒体袋は、前記粒体を内部に収容する環状の袋体であり、該袋体の中央に前記ワークの少なくとも一部を収容可能な開口を有する。これにより、開口に位置するワークは環状の袋体により把持できる。
(A)前記把持バッグの内部を外部と連通させた状態で、前記中子部材の内部を加圧することで前記中子部材を膨張させて、前記ワークに適した大きさに前記中子部材を設定し、
(B)前記受圧面を下向きにし、前記把持バッグの内部を外部と連通させた状態で、前記中子部材の下端が前記ワークに近接するまで前記把持装置を移動させ、これにより前記把持バッグの内部で前記粒体を、前記ワークの少なくとも一部を囲むように移動し、
(C)次いで、前記把持バッグの内部を減圧して収縮させ、これにより粒体間の空隙を低減して互いに密着させ、粒体間の摩擦力で成形された前記粒体の塊により前記ワークを側面から把持する、把持方法が提供される。
また、(B)の減圧の際に、中子部材の下端がワークに近接しており、ワークを囲まない粒体の比率が少ないので、ワークを囲む部分を十分に固化することができる。
この図において、1は搬送ロボット、2a,2b,2cはロボットアーム、3はロボットの手先部、4はロボット支持台、5a,5b,5cは関節、6は接続部である。
また、この図において、Wは把持するワーク(把持対象物)、7はワーク用容器である。
また、本発明において、ワークWは、密着可能な面が少なく、または滑りやすい「凹凸が多く、表面が毛状で覆われた縫いぐるみ」や、不均一な外力で壊れやすい卵(生卵、ゆで卵)を想定しているが、その他の対象物であってもよい。ここでいう不均一な力とは、ワークとの接触面積が小さいと接触面と非接触面の応力の差が大きく、接触境界部で過剰な応力が加わる場合の力である。
接続部6は、把持装置10とロボットの手先部3を接続するものである。
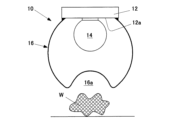
この図において、本発明の把持装置10は、固定部材12、中子部材14、把持バッグ16、粒体18、及び減圧装置20を備える。
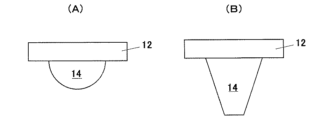
この図に示すように、中子部材14の形状は、中央部が下方に突出した半球形、錐体形、接頭錐体形(接頭多角錐、接頭円錐)、又は棒状形であってもよい。
すなわち、中子部材14は、中実であるか、中実でなくとも把持バッグ16の内部と連通しておらず、かつ減圧下及び大気圧下で形状がほとんど変化しない材質(例えば、金属又はプラスチック)であるのがよい。
この構成により、中子部材14をワークWに近接させることで、ワークWを包み込むように、把持バッグ16の内部で粒体18を中子部材14から遠ざける方向に移動させることができる。
この構成により、中子部材14内の圧力を正圧に加圧することで中子部材14を膨張させて、ワークWに適した大きさにすることができる。またこの膨張により、把持バッグ16内の粒体18の移動を促進することができる。
この図に示すように、把持バッグ16の外面(例えば下面)に内側(図で上側)に凹む窪み16aを有してもよい。窪み16aは、好ましくは半球形の窪みであるが、例えば切断断面が楕円形又は矩形の窪みでもよい。
また窪み16aは、ワークWの少なくとも一部を囲むことができる大きさを有することが好ましい。
例えば、把持バッグ16の素材は、天然ゴム、ラテックスゴム、弾性を有するプラスチック、ナイロンなどが望ましい。また、把持バッグ16の厚さは、例えば、0.1〜1.0mmであるのがよい。また、人間の指の指紋のように表面には微細なテクスチャー、文様や溝を形成しておいてもよい。
粒体18は、把持バッグ16の内圧が大気圧であり、中子部材14の外面(例えば下端)がワークWに近接するときに、ワークWの少なくとも一部を囲む総容積を占める。
この総容積は、図2に示す状態、すなわち受圧面12aを下向きにし、把持バッグ16の内圧が大気圧であるときの把持バッグ16と中子部材14の間の空間の半分から4分の3を占め、その上部に粒体18の存在しない空間が残る程度であるのがよい。
また、粒体18の存在しない空間の容積は、好ましくはワークWの全容積の半分以上、さらに好ましくはワークWの全容積以上であるのがよい。
また、この状態において、粒体18の上面は、中子部材14の下端とほぼ同じ高さ、又はそれより上に位置するのがよい。
なお、把持バッグ16の内部と外部との間には、図示しないフィルタが設けられ、粒体18が把持バッグ16の外部に流出しないようになっている。
例えば、球形の発泡ビーズとガラスビーズを粒体18として用いた場合、減圧後の発泡ビーズが元の形に戻ろうとする反発力が加わるので、ガラスビーズの場合より把持力が高くなることが実験的に確認されている。
なお本発明はこの構成に限定されず、減圧下及び大気圧下で形状がほとんど変化しない材質(例えば、ガラスビーズ)であってもよい。
従って、中子部材14により、粒体18の流動性を利用して、ワークWの少なくとも一部を囲むように把持装置10内部の粒体18を移動することができる。
この閾値は、ワークW(例えば不均一な外力で壊れやすい卵)を壊さない大きさであるのがよい。例えば、上記の所定間隔は、5〜50mmであり、下向きの力の閾値は、1〜2Nである。
この構成により、把持バッグ16の内部を減圧して収縮させ、かつ粒体間の空隙を低減してワークWを保持する形状に粒体18を密着させることで、形状が保持された粒体18の塊(以下、「粒体塊」と呼ぶ)によりワークWを側面から把持することができる。
この粒体移動の際に、中子部材14はワークWに接触しないので、ワークWには粒体全体の一部の重さのみが作用する。
また、粒体18は、原料として炒った豆(例えばコーヒ豆)や乾燥した木片等を砕いたもの、コーヒ豆の出しがら、コーンスターチ、コーンミール、乾燥した粉砕トウモロコシの皮、米、おがくず、粉砕された木の実の殻、オート麦、塩、種、そば殻、などでもよい。
すなわち、粒体18の最大径は、ワークWの幅、厚さ、長さのうちの最小値の例えば1/10以下であり、1/1000以上であるのがよい。
粒体18が球形の発泡ビーズである場合、その把持力は、発泡ビーズの直径が5mm、3mm、1mmの順で大きいことが実験的に確認されている。
また粒体18を相対的に大きくすることにより、把持バッグ内の空気比率を大きくすることができる。
この例では、減圧装置20は接続部6内に設置されているが、これらの機能を損なわなければ他の場所でもよい。
(A)受圧面12aを下向きにし、把持バッグ16の内部を外部と連通させた状態で、中子部材14の下端がワークWに近接するまで把持装置10を移動させ、これにより把持バッグ16の内部で粒体18を、ワークWの少なくとも一部を囲むように移動する。
(B)次いで、把持バッグ16の内部を減圧して収縮させ、これにより粒体間の空隙を低減して互いに密着させ、粒体間の摩擦力で成形された粒体18の塊(粒体塊)によりワークWを側面から把持する。
(C)ワークWを把持した状態で、把持バッグ16の内圧を大気圧に戻し、ワークWを解放する。
「ワークWの少なくとも一部」とは、把持装置10でワークWを把持する際の、ワークWの平面視で、幅方向又は長さ方向の少なくとも2点であり、ワークWを把持して搬送できる部分を意味する。
さらに、粒体18は、発泡樹脂(例えば発泡スチロール)であり、収縮時に元の形状に復帰する反発力を有する。
ワークWが、外力で壊れやすい卵の場合も同様である。
また、この状態において、把持バッグ16は球形であるが、内部の粒体18の重量により、球形から変形してもよい。
本発明の把持方法では、図5(B)と図6(A)に示すように、受圧面12aを下向きにし、把持バッグ16の内部を外部と連通させた状態で、中子部材14の下端がワークWに近接するまで、把持装置10を移動させる。これにより、把持装置10の一部がワークWの周りに位置しワークWの上部より低くなる。
従って、中子部材14の下端をワークWに近接させることで、中央部が下方に突出した中子部材14により、粒体18の流動性を利用して、ワークWの少なくとも一部を囲むように把持バッグ16の内部で粒体18を移動する。なおこの際、ワークWと把持バッグ16とは密着していなくてもよい。
次いで、図5(C)と図6(B)に示すように、把持バッグ16の内部を減圧して収縮させる。これにより粒体間の空隙を低減して互いに密着させ、粒体間の摩擦力で成形された粒体18の塊(粒体塊)によりワークWを側面から把持する。
またこの例では、粒体自体の反発力によりワークWの把持力を高めることができる。
さらに、この面圧は、減圧時の把持バッグ16の内圧と大気圧の差に比例するので、減圧時の内圧調節により可変に制御することができる。
さらに把持バッグ16が変形し、ワークWを包み込むため、密着する必要がなくなる。
図7(A)において、中子部材14は、内圧で膨張可能な中空弾性バッグである。
また、この例では、さらに、中子部材14の内部を加圧しかつ大気圧に戻すことができる加圧装置22を備える。
その他の構成は、第1実施形態と同様である。
なおこの例では、加圧装置22は接続部6内に設置されているが、これらの機能を損なわなければ他の場所でもよい。
この膨張により、ワークWに適した大きさに中子部材14を設定することができる。
なおこの際に、中子部材14の内圧は、加圧状態を保持しても、大気圧に戻してもよい。
この例において、中子部材14は、把持バッグ16の内圧の変化により外形寸法が変化しない剛体である。
開口24aは、好ましくは半球形の開口(面との接触部が円形となる口)であるが、面との接触部の形状が楕円形又は矩形の開口でもよい。
その他の構成は、第1実施形態と同様である。
すなわち、図8(A)は、受圧面12aを下向きにし、把持装置10がワークWの上部に位置する状態を示している。この状態において、把持バッグ16の内部は外部と図示しないフィルタを介して連通しており、上部空間の気体(例えば空気)を外部に排気できるようになっている。
ワークWが、外力で壊れやすい卵の場合も同様である。
また、この状態において、把持バッグ16は球形であるが、内部の粒体18の重量により、球形から変形してもよい。
この際、中空粒体袋24の開口24aに、ワークWを収容することで、中空粒体袋24の内部の粒体18を、ワークWの周りに容易に移動させることができる。
この減圧の際に、中子部材14の下端がワークWに近接しており、ワークWを囲まない粒体18の比率が少ないので、ワークWを囲む部分を十分に固化することができる。
また、中子部材14は固定部材12に固定している説明をしているが、粒体より密度が小さく粒体中に沈みこまないものであれば固定しない部材でも同様の効果が見込まれる。
Claims (5)
- 受圧面を有する固定部材と、
前記受圧面の中心部に固定された中子部材と、
前記受圧面に前記中子部材を囲んで取り付けられ、気密性を有しかつ変形可能な中空の把持バッグと、
前記把持バッグの内部に空間を残して流動可能に収容された粒体と、
前記把持バッグの内部を減圧して収縮させ、かつ大気圧に戻すことができる減圧装置と、を備え、
前記中子部材は、前記把持バッグ内に突出しており、
前記粒体は、ワークの少なくとも一部を囲む総容積を占め、
前記中子部材は、内圧で膨張可能な中空弾性バッグであり、
さらに、前記中子部材の内部を加圧しかつ大気圧に戻すことができる加圧装置を備える、把持装置。 - 前記把持バッグの内部に収容された通気性の中空粒体袋を備え、
前記中空粒体袋は、前記粒体を内部に収容する環状の袋体であり、該袋体の中央に前記ワークの少なくとも一部を収容可能な開口を有する、請求項1に記載の把持装置。 - 前記中子部材の形状は、球形、半球形、錐体形、接頭錐体形、又は棒状形である、請求項1に記載の把持装置。
- 前記把持バッグは、その外面に内側に凹む窪みを有する、請求項1に記載の把持装置。
- 請求項1に記載の把持装置を用いた把持方法であって、
(A)前記把持バッグの内部を外部と連通させた状態で、前記中子部材の内部を加圧することで前記中子部材を膨張させて、前記ワークに適した大きさに前記中子部材を設定し、
(B)前記受圧面を下向きにし、前記把持バッグの内部を外部と連通させた状態で、前記中子部材の下端が前記ワークに近接するまで前記把持装置を移動させ、これにより前記把持バッグの内部で前記粒体を、前記ワークの少なくとも一部を囲むように移動し、
(C)次いで、前記把持バッグの内部を減圧して収縮させ、これにより粒体間の空隙を低減して互いに密着させ、粒体間の摩擦力で成形された前記粒体の塊により前記ワークを側面から把持する、把持方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015208803A JP6628131B2 (ja) | 2015-10-23 | 2015-10-23 | 把持装置とこれを用いた把持方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015208803A JP6628131B2 (ja) | 2015-10-23 | 2015-10-23 | 把持装置とこれを用いた把持方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017080825A JP2017080825A (ja) | 2017-05-18 |
| JP6628131B2 true JP6628131B2 (ja) | 2020-01-08 |
Family
ID=58710289
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015208803A Active JP6628131B2 (ja) | 2015-10-23 | 2015-10-23 | 把持装置とこれを用いた把持方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6628131B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7081781B2 (ja) * | 2017-06-08 | 2022-06-07 | 国立大学法人東北大学 | 変形装置 |
| JP6588949B2 (ja) * | 2017-09-26 | 2019-10-09 | 株式会社東芝 | 把持ツール、把持システム、および樹脂部材の製造方法 |
| EP3689558B1 (en) * | 2017-09-29 | 2024-01-03 | Nitta Corporation | Gripping device and industrial robot |
| JP7081973B2 (ja) * | 2018-04-27 | 2022-06-07 | ニッタ株式会社 | 把持装置及び産業用ロボット |
| CN110576450B (zh) * | 2018-06-07 | 2023-03-14 | 中国科学院沈阳自动化研究所 | 一种电驱动两自由度柔性机械手 |
| JP7159951B2 (ja) * | 2019-04-04 | 2022-10-25 | 株式会社ダイフク | 物品把持装置 |
| CN111113464A (zh) * | 2020-01-21 | 2020-05-08 | 苏州迪天机器人自动化有限公司 | 一种抓取装置 |
| JP7513563B2 (ja) * | 2021-04-12 | 2024-07-09 | ニッタ株式会社 | 把持装置及び産業用ロボット |
| KR102535215B1 (ko) * | 2021-10-08 | 2023-05-26 | 한국기계연구원 | 측면 파지가 가능한 그리퍼 |
| KR102705157B1 (ko) * | 2022-03-04 | 2024-09-11 | 성균관대학교산학협력단 | 진공 흡착 장치 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011183536A (ja) * | 2010-03-11 | 2011-09-22 | Ihi Corp | 形状自在な吸着パッド |
| JP2013523478A (ja) * | 2010-04-15 | 2013-06-17 | コーネル・ユニバーシティー | グリッピングおよびリリーシングの装置および方法 |
| JP5843212B2 (ja) * | 2011-02-28 | 2016-01-13 | 株式会社Ihi | 形状自在な吸着グリッパとこれによる把持方法 |
| JP5780388B2 (ja) * | 2011-04-08 | 2015-09-16 | 株式会社Ihi | グリッパ |
| CN203665546U (zh) * | 2014-01-18 | 2014-06-25 | 黑龙江工程学院 | 基于小颗粒物真空状态转换的被动式通用机器手 |
| WO2015123128A1 (en) * | 2014-02-11 | 2015-08-20 | Empire Robotics, Inc. | Jamming grippers and methods of use |
-
2015
- 2015-10-23 JP JP2015208803A patent/JP6628131B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017080825A (ja) | 2017-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6628131B2 (ja) | 把持装置とこれを用いた把持方法 | |
| WO2015006613A1 (en) | End effector, apparatus, system and method for gripping and releasing articles and the like | |
| CN102939189B (zh) | 夹持与释放设备及方法 | |
| Amend et al. | A positive pressure universal gripper based on the jamming of granular material | |
| He et al. | Soft fingertips with tactile sensing and active deformation for robust grasping of delicate objects | |
| JP5843212B2 (ja) | 形状自在な吸着グリッパとこれによる把持方法 | |
| Kultongkham et al. | The design of a force feedback soft gripper for tomato harvesting | |
| CN105818143B (zh) | 基于主动包络和被动塑形的柔性多臂气动夹持器 | |
| JP5822110B2 (ja) | 形状可変な吸着グリッパ | |
| JP6831136B2 (ja) | 電気−空気圧複合駆動柔軟指のイーグルクローを模擬した物流梱包用ロボットハンド | |
| JP7393761B2 (ja) | 吸着グリッパ | |
| Arachchige et al. | A novel variable stiffness soft robotic gripper | |
| CN108381534A (zh) | 一种具有弓字形连续弯曲内腔的柔性机械手 | |
| TW201742790A (zh) | 食品塡裝裝置 | |
| JP2013240853A (ja) | ハンド装置 | |
| CN107414882A (zh) | 一种气动吞咽型柔性机械手 | |
| Nguyen et al. | Fabric-based soft grippers capable of selective distributed bending for assistance of daily living tasks | |
| JP5800127B2 (ja) | 形状自在な吸着グリッパ | |
| JP2011183536A (ja) | 形状自在な吸着パッド | |
| JP2015217439A (ja) | ロボットハンド | |
| Egli et al. | Sensorized soft skin for dexterous robotic hands | |
| CN209812365U (zh) | 一种软硬混合约束纯二维双向张合的气动软体夹持器 | |
| Gai et al. | A modular four-modal soft grasping device | |
| JP6353152B2 (ja) | 把持装置及び産業用ロボット | |
| JP5780388B2 (ja) | グリッパ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191121 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6628131 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |