JP6625899B2 - 電気機械変換器 - Google Patents
電気機械変換器 Download PDFInfo
- Publication number
- JP6625899B2 JP6625899B2 JP2016033192A JP2016033192A JP6625899B2 JP 6625899 B2 JP6625899 B2 JP 6625899B2 JP 2016033192 A JP2016033192 A JP 2016033192A JP 2016033192 A JP2016033192 A JP 2016033192A JP 6625899 B2 JP6625899 B2 JP 6625899B2
- Authority
- JP
- Japan
- Prior art keywords
- armature
- displacement
- magnets
- electromechanical converter
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 claims description 37
- 230000004907 flux Effects 0.000 claims description 30
- 230000007246 mechanism Effects 0.000 claims description 9
- 230000000149 penetrating effect Effects 0.000 claims description 5
- 230000003014 reinforcing effect Effects 0.000 description 12
- 239000000463 material Substances 0.000 description 7
- 229920006395 saturated elastomer Polymers 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 229910000889 permalloy Inorganic materials 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 238000009738 saturating Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/02—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with armatures moved one way by energisation of a single coil system and returned by mechanical force, e.g. by springs
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R11/00—Transducers of moving-armature or moving-core type
- H04R11/02—Loudspeakers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; DEAF-AID SETS; PUBLIC ADDRESS SYSTEMS
- H04R25/00—Deaf-aid sets, i.e. electro-acoustic or electro-mechanical hearing aids; Electric tinnitus maskers providing an auditory perception
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Power Engineering (AREA)
- Electrostatic, Electromagnetic, Magneto- Strictive, And Variable-Resistance Transducers (AREA)
Description
ΔS=Smmax−Sm(0) (1)
前述したように、バネ部材20〜23のスティフネスSeは負のスティフネスの最大値Smmaxより大きくする必要があるので(Smmax≦Se)、電気機械変換器の感度の最大値は、(1)式の差ΔSの逆数に比例することになる。
Smmax/ΔS={1−Sm(0)/Smmax}-1 (2)
よって、(2)式の右辺のSm(0)/Smmaxを1に近付けることで、入力電力に対する駆動力の大きさを非常に大きい値にすることができる。図8の例では、Sm(0)/Smmaxが約0.64であるので、Smmax/ΔSが約2.8となるが、Smmax/ΔSを0.9以上にできれば、Smmax/ΔSが10以上となるので、駆動力を3倍以上に増加させることが可能である。
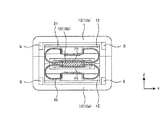
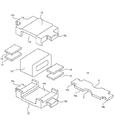
11…駆動部
12、13…ヨーク
14…コイル
15、16、17、18…磁石
19…アーマチュア
20、21、22、23…バネ部材
P1…アーマチュア補強板
G1、G2、G3、G4…ギャップ
Claims (7)
- 電気信号を機械振動に変換する電気機械変換器において、
少なくとも1対の磁石と、前記磁石による磁束を導くヨークと、前記電気信号が供給されるコイルとを一体的に配置した構造部と、
前記構造部の内部空間を貫く内側部と、前記内側部から第1の方向の両側に突出した第1の外側部及び第2の外側部とを有し、前記内側部のうち互いに逆向きの前記磁束が導かれる2つの領域を介して前記構造部と磁気回路を構成し、前記磁気回路の磁気力に基づく変位方向に変位するアーマチュアと、
前記第1の外側部と前記構造部との間に挟持され、前記アーマチュアの変位に応じた復元力を前記第1の外側部に付与する第1の弾性機構と、
前記第2の外側部と前記構造部との間に挟持され、前記アーマチュアの変位に応じた復元力を前記第2の外側部に付与する第2の弾性機構と、
を備え、
前記アーマチュアは、前記2つの領域の間の所定位置における断面積が前記2つの領域における断面積に比べて小さい形状を有し、前記アーマチュアの変位の範囲内において前記アーマチュアを前記第1の方向に流れる磁束が飽和することを特徴とする電気機械変換器。 - 前記第1の方向及び前記変位方向に直交する第2の方向における前記アーマチュアの幅は、前記2つの領域に比べて前記所定位置で小さいことを特徴とする請求項1に記載の電気機械変換器。
- 前記アーマチュアは、変位方向で一定の厚さを有する平板状の部材であることを特徴とする請求項2に記載の電気機械変換器。
- 前記アーマチュアの内側部のうち前記第2の方向の両側に対称配置された凹部が形成されていることを特徴とする請求項2又は3の記載の電気機械変換器。
- 前記少なくとも1対の磁石は、前記アーマチュアの前記2つの領域において、それぞれギャップを介して対向する2対の磁石であることを特徴とする請求項1から4のいずれか1項に記載の電気機械変換器。
- 前記第1及び第2の弾性機構の各々は、前記アーマチュアを挟んで前記変位方向に対称配置された1対の弾性部材であることを特徴とする請求項1から5のいずれか1項に記載の電気機械変換器。
- 前記1対の弾性部材は、前記復元力に応じた所定のバネ定数を有する1対のバネ部材であることを特徴とする請求項6に記載の電気機械変換器。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016033192A JP6625899B2 (ja) | 2016-02-24 | 2016-02-24 | 電気機械変換器 |
| DK17157361.1T DK3211919T3 (en) | 2016-02-24 | 2017-02-22 | Electromechanical transducer |
| US15/439,750 US10447132B2 (en) | 2016-02-24 | 2017-02-22 | Electromechanical transducer |
| EP17157361.1A EP3211919B1 (en) | 2016-02-24 | 2017-02-22 | Electromechanical transducer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016033192A JP6625899B2 (ja) | 2016-02-24 | 2016-02-24 | 電気機械変換器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017152903A JP2017152903A (ja) | 2017-08-31 |
| JP6625899B2 true JP6625899B2 (ja) | 2019-12-25 |
Family
ID=58185286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016033192A Active JP6625899B2 (ja) | 2016-02-24 | 2016-02-24 | 電気機械変換器 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10447132B2 (ja) |
| EP (1) | EP3211919B1 (ja) |
| JP (1) | JP6625899B2 (ja) |
| DK (1) | DK3211919T3 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6813423B2 (ja) | 2017-04-25 | 2021-01-13 | リオン株式会社 | 電気機械変換器 |
| JP6994429B2 (ja) | 2018-04-27 | 2022-01-14 | リオン株式会社 | 電気機械変換器及び電気音響変換器 |
| CN108696810A (zh) * | 2018-05-17 | 2018-10-23 | 深圳倍声声学技术有限公司 | 一种动铁受话器 |
| CN209200903U (zh) * | 2018-12-17 | 2019-08-02 | 瑞声科技(南京)有限公司 | 振动电机 |
| US11617049B2 (en) * | 2018-12-25 | 2023-03-28 | Suzhou Sensorfun Electronics Co., Ltd | Receiver |
| CN110012398B (zh) * | 2019-05-14 | 2024-03-12 | 潘国昌 | 一种平衡振动系统 |
| JP2022047020A (ja) * | 2020-09-11 | 2022-03-24 | リオン株式会社 | 電気機械変換器 |
| JP2022170144A (ja) * | 2021-04-28 | 2022-11-10 | 日本電産サンキョー株式会社 | アクチュエータ |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3631935B2 (ja) * | 2000-03-14 | 2005-03-23 | スター精密株式会社 | 電気音響変換器 |
| US7817815B2 (en) * | 2000-05-09 | 2010-10-19 | Knowles Electronics, Llc | Armature for a receiver |
| US7471801B2 (en) * | 2002-05-10 | 2008-12-30 | Osseofon Ab | Device for the generation of or monitoring of vibrations |
| US7869610B2 (en) | 2005-11-30 | 2011-01-11 | Knowles Electronics, Llc | Balanced armature bone conduction shaker |
| KR20110063792A (ko) * | 2008-08-29 | 2011-06-14 | 더 펜 스테이트 리서어치 파운데이션 | 밸런스드 아마추어 장치의 왜곡을 감소시키는 방법 및 장치 |
| CN103428618A (zh) | 2012-05-18 | 2013-12-04 | 周巍 | 用于动铁式扬声器或受话器中的电枢装置 |
| JP6276511B2 (ja) * | 2013-03-15 | 2018-02-07 | リオン株式会社 | 電気機械変換器及び電気音響変換器 |
| KR20150004079A (ko) * | 2013-07-02 | 2015-01-12 | 삼성전자주식회사 | 밸런스드 아마추어 트랜스듀서의 성능 개선 장치 |
| JP5653543B1 (ja) | 2014-01-21 | 2015-01-14 | リオン株式会社 | 電気機械変換器及び電気音響変換器 |
| JP5579335B1 (ja) * | 2014-02-18 | 2014-08-27 | リオン株式会社 | 電気機械変換器 |
| JPWO2017047187A1 (ja) * | 2015-09-16 | 2018-07-12 | アルプス電気株式会社 | 発音装置およびその製造方法 |
-
2016
- 2016-02-24 JP JP2016033192A patent/JP6625899B2/ja active Active
-
2017
- 2017-02-22 EP EP17157361.1A patent/EP3211919B1/en active Active
- 2017-02-22 US US15/439,750 patent/US10447132B2/en active Active
- 2017-02-22 DK DK17157361.1T patent/DK3211919T3/en active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017152903A (ja) | 2017-08-31 |
| EP3211919B1 (en) | 2018-12-26 |
| EP3211919A1 (en) | 2017-08-30 |
| US20170244309A1 (en) | 2017-08-24 |
| DK3211919T3 (en) | 2019-03-25 |
| US10447132B2 (en) | 2019-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6625899B2 (ja) | 電気機械変換器 | |
| JP5653543B1 (ja) | 電気機械変換器及び電気音響変換器 | |
| JP6276511B2 (ja) | 電気機械変換器及び電気音響変換器 | |
| US8995705B2 (en) | Multi-layer armature for moving armature receiver | |
| US20190173367A1 (en) | Vibrating actuator | |
| KR20110063792A (ko) | 밸런스드 아마추어 장치의 왜곡을 감소시키는 방법 및 장치 | |
| JP5802547B2 (ja) | 電気機械変換器と電気音響変換器及びそれを用いた補聴器 | |
| DK202070705A1 (en) | Electro-mechanical converter and electroacoustic converter | |
| JP6813423B2 (ja) | 電気機械変換器 | |
| JP5579335B1 (ja) | 電気機械変換器 | |
| JP6625896B2 (ja) | 電気機械変換器 | |
| US20230370782A1 (en) | Electromechanical transducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191128 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6625899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |