以下に、本発明にかかるヒートポンプ装置およびヒートポンプシステムの実施の形態を図面に基づいて詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。
実施の形態1.
実施の形態1では、ヒートポンプ装置100の基本的な構成および動作について説明する。
図1は、実施の形態1におけるヒートポンプ装置100の構成を示す図である。実施の形態1におけるヒートポンプ装置100は、圧縮機1、四方弁2、熱交換器3、膨張機構4、熱交換器5が、冷媒配管6を介して順次接続された冷凍サイクルを備える。圧縮機1の内部には冷媒を圧縮する圧縮機構7と、この圧縮機構7を動作させるモータ8とが設けられている。モータ8は、U相、V相、W相の三相の巻き線を有する三相モータである。
モータ8に電圧を与えて駆動させるインバータ9は、モータ8と電気的に接続されている。インバータ9は、モータ8のU相、V相、W相の巻き線に電圧Vu,Vv,Vwをそれぞれ印加する。
インバータ9には、高周波電圧発生部11と加熱判定部12とを備えるインバータ制御部10が電気的に接続されている。インバータ制御部10では、インバータ9から送られるインバータ9の電源電圧である母線電圧Vdcの値と、加熱判定部12によるモータ8を加熱する必要があるという判定とに基づいて、高周波電圧発生部11のスペクトル拡散電圧指令生成部13は、周波数スペクトルを拡散した高周波電圧を印加するPWM(Pulse Width Modulation)信号(駆動信号)を生成してインバータ9へ出力する。
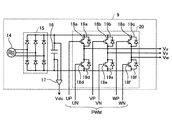
図2は、実施の形態1におけるインバータ9の構成を示す図である。インバータ9は、交流電源14と、交流電源14から供給される電圧を整流する整流器15と、整流器15で整流された電圧を平滑して直流電圧(母線電圧Vdc)を生成する平滑コンデンサ16と、平滑コンデンサ16で生成された母線電圧Vdcを検出してインバータ制御部10へ出力する母線電圧検出部17と、を備える。
また、インバータ9は、母線電圧Vdcを電源とする電圧印加部20を備える。電圧印加部20は、2つのスイッチング素子(18aと18d、18bと18e、18cと18f)の直列接続部が3個並列に接続され、各スイッチング素子18a〜18fそれぞれと並列に接続された環流ダイオード19a〜19fを備える回路である。なお、以降の説明において、区別する必要のない場合は、スイッチング素子18と表すことがある。電圧印加部20は、インバータ制御部10より送られるPWM信号UP,VP,WP,UN,VN,WNに応じて、それぞれに対応したスイッチング素子(UPは18a、VPは18b、WPは18c、UNは18d、VNは18e、WNは18f)を駆動する。そして、電圧印加部20は、駆動したスイッチング素子18に応じた電圧Vu,Vv,Vwを、モータ8のU相、V相、W相の巻き線それぞれに印加する。
図3は、実施の形態1におけるインバータ制御部10の構成を示す図である。上述したように、インバータ制御部10は、高周波電圧発生部11と加熱判定部12とを備える。加熱判定部12については後述し、ここでは高周波電圧発生部11について説明する。高周波電圧発生部11は、テーブルデータ21、外部入力部22、選択部23、積分器24、電圧指令生成部25、PWM信号生成部26を備える。電圧指令生成部25およびPWM信号生成部26で、スペクトル拡散電圧指令生成部13を構成する。
選択部23は、テーブルデータ21に記録された電圧指令値Vtと、外部入力部22から入力された電圧指令値Vaとのうちいずれか1つを電圧指令値V*として選択して出力する。また、選択部23は、テーブルデータ21に記録された回転数指令値ωtと、外部入力部22から入力された回転数指令値ωaとのうちいずれか1つを回転数指令値ω*として選択して出力する。
積分器24は、選択部23が出力した回転数指令値ω*から電圧指令値位相θを求める。
電圧指令生成部25は、電圧指令値V*と、積分器24が求めた電圧指令値位相θとを入力として、電圧指令値Vu*,Vv*,Vw*を生成して出力する。
PWM信号生成部26は、電圧指令生成部25が出力した電圧指令値Vu*,Vv*,Vw*と、母線電圧Vdcとに基づいて、PWM信号UP,VP,WP,UN,VN,WNを生成し、インバータ9へ出力する。
電圧指令生成部25の電圧指令値Vu*,Vv*,Vw*の生成方法およびPWM信号生成部26のPWM信号UP,VP,WP,UN,VN,WNの生成方法について説明する。図4は、実施の形態1におけるPWM信号生成部26の入出力波形を示す図である。例えば、スペクトル拡散を行わない場合、電圧指令値Vu*,Vv*,Vw*を、式(1)〜式(3)のように位相が2π/3ずつ異なる余弦波(正弦波)と定義する。ただし、V*は電圧指令値の振幅、θは電圧指令値位相である。なお、スペクトル拡散の方法については、後述する。
(1)Vu*=V*cosθ
(2)Vv*=V*cos(θ−(2/3)π)
(3)Vw*=V*cos(θ+(2/3)π)
電圧指令生成部25は、電圧指令値V*と、積分器24が求めた電圧指令値位相θとに基づいて、式(1)〜式(3)により電圧指令値Vu*,Vv*,Vw*を計算し、計算した電圧指令値Vu*,Vv*,Vw*をPWM信号生成部26へ出力する。
PWM信号生成部26は、電圧指令値Vu*,Vv*,Vw*と、所定の周波数で振幅Vdc/2のキャリア信号(基準信号)とを比較し、相互の大小関係に基づいて、PWM信号UP,VP,WP,UN,VN,WNを生成する。PWM信号生成部26は、例えば、電圧指令値Vu*がキャリア信号よりも大きい場合には、PWM信号UPはスイッチング素子18aをオンにする電圧とし、PWM信号UNはスイッチング素子18dをオフにする電圧とする。また、PWM信号生成部26は、電圧指令値Vu*がキャリア信号よりも小さい場合には、逆に、PWM信号UPはスイッチング素子18aをオフにする電圧とし、PWM信号UNはスイッチング素子18dをオンにする電圧とする。他の信号についても同様であり、PWM信号生成部26は、電圧指令値Vv*とキャリア信号との比較によりPWM信号VP,VNを決定し、電圧指令値Vw*とキャリア信号との比較によりPWM信号WP,WNを決定する。一般的なインバータの場合、相補PWM方式を採用しているため、PWM信号UPとUN、VPとVN、WPとWNは互いに逆の関係となる。そのため、スイッチングパターンは全部で8通りとなる。
図5は、実施の形態1における8通りのスイッチングパターンを示す図である。なお、図5では、各スイッチングパターンで発生する電圧ベクトルにV0〜V7の符号を付している。また、各電圧ベクトルの電圧の方向を±U,±V,±W(電圧が発生しない場合には0)で表している。ここで、+Uとは、U相を介してモータ8へ流入し、V相およびW相を介してモータ8から流出するU相方向の電流を発生させる電圧である。また、−Uとは、V相およびW相を介してモータ8へ流入し、U相を介してモータ8から流出する−U相方向の電流を発生させる電圧である。±V,±Wについても同様の解釈である。
PWM信号生成部26は、図5に示すスイッチングパターンを組み合わせて電圧ベクトルを出力することでインバータ9に所望の電圧を出力させることができる。一般的な圧縮機1の冷媒を、モータ8を用いて圧縮動作(通常運転モード)の場合には1kHz以下で動作することが一般的である。PWM信号生成部26は、このときに位相を高速で変化させることにより、1kHzを超える高周波の電圧を出力し、圧縮機1に通電(加熱運転モード)することが可能となる。
なお、式(1)〜式(3)以外にも二相変調、三次高調波重畳変調、空間ベクトル変調等により電圧指令値Vu*,Vv*,Vw*を求めても構わない。
ただし、一般的なインバータの場合、キャリア信号の周波数であるキャリア周波数はインバータのスイッチング素子のスイッチングスピードにより上限が決まっている。そのため、搬送波であるキャリア信号の周波数(キャリア周波数)以上の高周波電圧を出力することは困難である。なお、一般的なIGBT(Insulated Gate Bipolar Transistor)の場合、スイッチングスピードの上限は20kHz程度である。
また、高周波電圧の周波数がキャリア周波数の1/10程度になると、高周波電圧の波形出力精度が悪化し直流成分が重畳するなど悪影響をおよぼすおそれがある。この点を考慮し、キャリア周波数を20kHzとした場合に、高周波電圧の周波数をキャリア周波数の1/10の2kHz以下とすると、高周波電圧の周波数は可聴周波数領域となり、騒音悪化が懸念される。
そこで、インバータ制御部10では、図6に示すように積分器24(図3参照)に代えて、基準位相θfに、選択部23にて切り換えられた位相θpと位相θnを加算して電圧指令値位相θとする加算部27を設ける。図6は、実施の形態1におけるもう1つのインバータ制御部10の構成を示す図である。
ここで、図3では、回転数指令値ω*を積分器24にて積分して電圧指令値位相θを求めていた。これに対し、図6では、選択部23(位相切替部)が、位相θpと、位相θpとほぼ180度異なる位相θnとの2種類の電圧指令値位相を交互に切り換える。また、選択部23は、テーブルデータ21に記録された位相θtと、外部入力部22から入力された位相θaとのうちいずれか1つを基準位相θfとして選択して出力する。そして、加算部27が、基準位相θfに、選択部23が選択した位相θpまたは位相θnを加算して電圧指令値位相θとする。なお、以下の説明では、θp=0[度]、θn=180[度]として説明する。
次に、インバータ制御部10の動作について説明する。選択部23が、キャリア信号の頂(山)または底(谷)のタイミングで、あるいは、頂および底のタイミングで、位相θpと位相θnとを交互に切り替える。そして、加算部27が、基準位相θfに、選択部23が選択した位相θpまたは位相θnを加算して電圧指令値位相θとして電圧指令生成部25へ出力する。電圧指令生成部25は、スペクトル拡散を行わない場合、電圧指令値位相θと、電圧指令値V*とを用いて式(1)〜式(3)にて電圧指令値Vu*,Vv*,Vw*を得て、PWM信号生成部26へ出力する。選択部23が位相θpと位相θnとを、キャリア信号の頂または底、頂および底のタイミングで切り替えることで、キャリア信号に同期したPWM信号を出力することが可能となる。
図7は、選択部23がキャリア信号の頂および底のタイミングで、位相θpと位相θnとを交互に切り替えた場合のタイミングチャートである。なお、PWM信号UPとUN、VPとVN、WPとWNはそれぞれオン/オフ状態が逆であり、一方が分かれば他方も分かるため、ここではPWM信号UP,VP,WPのみを示している。また、ここでは、基準位相θf=0[度]としている。この場合、図7に示すようにPWM信号が変化する。そして、電圧ベクトルはV0(UP=VP=WP=0),V4(UP=1、VP=WP=0),V7(UP=VP=WP=1),V3(UP=0、VP=WP=1),V0(UP=VP=WP=0),…の順で変化する。
図8は、図7に示す電圧ベクトルの変化を示す図である。なお、図8では、破線で囲まれたスイッチング素子18がオン、破線で囲まれていないスイッチング素子18がオフの状態であることを表している。図8に示すように、電圧ベクトルV0,V7印加時はモータ8の線間が短絡状態となり、電圧が出力されない。この場合、モータ8のインダクタンスに蓄えられたエネルギーが電流となって短絡回路中を流れる。また、電圧ベクトルV4印加時には、U相を介してモータ8へ流入し、V相およびW相を介してモータ8から流出するU相方向の電流(+Iuの電流)がモータ8の巻線に流れる。また、電圧ベクトルV3印加時には、V相およびW相を介してモータ8へ流入し、U相を介してモータ8から流出する−U相方向の電流(−Iuの電流)がモータ8の巻線に流れる。
すなわち、電圧ベクトルV4印加時と、電圧ベクトルV3印加時とでは逆方向の電流がモータ8の巻線に流れる。そして、電圧ベクトルがV0,V4,V7,V3,V0,…の順で変化するため、+Iuの電流と−Iuの電流とが交互にモータ8の巻線に流れることになる。特に、図5に示すように、電圧ベクトルV4とV3とが1キャリア周期(1/fc)の間に現れるため、キャリア周波数fcに同期した交流電圧をモータ8の巻線に印加することが可能となる。
また、電圧ベクトルV4(+Iuの電流)と電圧ベクトルV3(−Iuの電流)とが交互に出力されるため、正逆のトルクが瞬時切り替わる。そのため、トルクが相殺されることによりロータの振動を抑えた電圧の印加が可能となる。
また、選択部23がキャリア信号の底のタイミングで、位相θpと位相θnとを交互に切り換える場合について考える。その場合、電圧ベクトルはV0,V4,V7,V7,V3,V0,V0,V3,V7,V7,V4,V0,…の順で変化する。電圧ベクトルV4と電圧ベクトルV3とが2キャリア周期の間に現れるため、1/2キャリア周波数の交流電圧をモータ8の巻線に印加することが可能となる。
図9は、IPM(Interior Permanent Magnet)モータのロータ位置(ロータの停止位置)を示す図である。ここでは、IPMモータのロータ位置φは、ロータのN極の向きがU相方向からずれた角度の大きさによって表される。図10は、ロータ位置による電流変化を示す図である。IPMモータの場合、巻線インダクタンスはロータ位置に依存する。そのため、電気角周波数ωとインダクタンス値との積で表される巻線インピーダンスは、ロータ位置に応じて変動する。したがって、同一電圧を印加した場合においても、ロータ位置によって、モータ8の巻線に流れる電流が変動してしまい、加熱量が変化してしまう。その結果、ロータ位置によっては、必要な加熱量を得るために、多くの電力が消費されるおそれがある。
そこで、選択部23は、時間の経過と共に基準位相θfを変化させ、ロータに満遍なく電圧を印加する。図11は、基準位相θfを時間の経過とともに変化させた場合の印加電圧を示す図である。ここでは、基準位相θfを時間の経過とともに、例えば、0度、45度、90度、135度、…と45度ずつ変化させている。基準位相θfが0度であれば、電圧指令値位相θは0度、180度となり、基準位相θfが45度であれば、電圧指令値位相θは45度、225度となり、基準位相θfが90度であれば、電圧指令値位相θは90度、270度となり、基準位相θfが135度であれば、電圧指令値位相θは135度、315度となる。
つまり、初めに、基準位相θfが0度に設定され、所定の時間、電圧指令値位相θがキャリア信号に同期して0度と180度とで切り替えられる。その後、基準位相θfが45度に切り替えられ、所定の時間、電圧指令値位相θがキャリア信号に同期して45度と225度とで切り替えられる。その後、基準位相θfが90度に切り替えられ、…というように、所定の時間毎に、0度と180度、45度と225度、90度と270度、135度と315度、…と電圧指令値位相θが切り替えられる。これにより、時間の経過とともに、高周波交流電圧の通電位相が変化するため、ロータ停止位置によるインダクタンス特性の影響を排除することができ、ロータ位置に依存せず均一な圧縮機1の加熱が可能となる。
図12は、基準位相θfが0度(U相(電圧ベクトルV4)方向が0度)、30度、60度の時のモータ8のUVWの各相に流れる電流を示す図である。基準位相θfが0度の場合には、図7に示すように電圧ベクトルV0とV7との間に他の電圧ベクトル(スイッチング素子18a〜18fの正電圧側1つと負電圧側2つ、または、正電圧側2つと負電圧側1つがオン状態となる電圧ベクトル)が1つのみ発生する。この場合、電流波形は台形状となり高調波成分の少ない電流となる。
しかし、基準位相θfが30度の場合には、電圧ベクトルV0とV7との間に異なる2つの電圧ベクトルが発生する。この場合、電流波形が歪み、高調波成分の多い電流となる。この電流波形の歪みはモータ騒音やモータ軸振動などの悪影響を与えるおそれがある。また、基準位相θfが60度の場合も、基準位相θfが0度の場合と同様に、電圧ベクトルV0とV7との間に他の電圧ベクトルが1つのみ発生する。この場合、電流波形は台形状となり、高調波成分が少ない電流となる。
このように、基準位相θfが60度のn倍(nは0以上の整数)の場合には、電圧指令値位相θが60度の倍数となるため(ここでは、θp=0[度]、θn=180[度]である)、電圧ベクトルV0とV7との間に他の電圧ベクトルが1つのみ発生する。一方、基準位相θfが60度のn倍以外の場合には、電圧指令値位相θが60度の倍数とならないため、電圧ベクトルV0とV7との間に他の電圧ベクトルが2つ発生してしまう。電圧ベクトルV0とV7との間に他の電圧ベクトルが2つ発生してしまうと、電流波形が歪み、高調波成分の多い電流となり、モータ騒音やモータ軸振動などの悪影響を与えるおそれがある。したがって、選択部23では、基準位相θfを、0度、60度、…のように60度刻みで変化させることが望ましい。
図13は、実施の形態1における加熱判定部12の構成を示す図である。加熱判定部12は、インバータ9の母線電圧検出部17が検出した母線電圧Vdcに基づき、高周波電圧発生部11の動作状態(ON/OFF)を制御する。加熱判定部12は、電圧比較部28、温度検出部29、温度比較部30、第1論理積計算部31、寝込み判定部32、経過時間計測部33、時間比較部34、リセット部35、論理和計算部36、第2論理積計算部37を備える。
電圧比較部28は、母線電圧検出部17により検出した母線電圧Vdcが、Vdc_min<Vdc<Vdc_maxの状態の時に正常状態と判断して1を、それ以外の場合には0を出力する。ここで、Vdc_maxは母線電圧上限値、Vdc_minは母線電圧下限値である。Vdc_max以上の過大な母線電圧の場合や、Vdc_min以下の過小な母線電圧の場合には、電圧比較部28は、異常状態と判断して0を出力することで、加熱を停止するよう動作する。
温度検出部29は、電圧印加部20の温度であるインバータ温度Tinv、圧縮機1の温度Tc、外気温度Toを検出する。
温度比較部30は、予め設定したインバータの保護温度Tp_invとインバータ温度Tinvとを比較するとともに、予め設定した圧縮機1の保護温度Tp_cと圧縮機温度Tcとを比較する。そして、温度比較部30は、Tp_inv>Tinvの状態、かつ、Tp_c>Tcの状態では正常に動作していると判断して1を、それ以外の場合には0を出力する。ここで、Tp_inv<Tinvとなった場合には、インバータ温度Tinvが高温になっており、また、Tp_c<Tcとなった場合には、圧縮機1内のモータ8の巻線温度が高温となり、絶縁不良等のおそれがある。そのため、温度比較部30は、加熱不要と判断して0を出力して加熱を停止するよう動作する。ここで、圧縮機1はモータ8の巻線に比べて熱容量が大きく、温度の上昇速度が巻線に比べて遅い点を考慮してTp_cを設定する必要がある。
第1論理積計算部31は、以上の電圧比較部28、温度比較部30の出力値の論理積を出力する。電圧比較部28、温度比較部30の出力値のいずれか1つでも異常状態の0となった場合には、第1論理積計算部31が0を出力して加熱を停止するよう動作させる。なお、ここでは、母線電圧Vdc、インバータ温度Tinv、圧縮機1の温度Tcを用いて加熱を停止する方法について述べたが、全てを用いなくてもよい。また、ここで述べた以外のパラメータを用いて加熱を停止するよう構成してもよいことは言うまでもない。
続いて、温度検出部29により検出した圧縮機1の温度Tcと外気温度Toとに基づいて、寝込み判定部32は、圧縮機1内に液冷媒が滞留した状態(冷媒が寝込んだ状態)か否かを判断する。圧縮機1は冷凍サイクル中で最も熱容量が大きく、外気温度Toの上昇に対して、圧縮機1の温度Tcは遅れて上昇するため、最も温度が低くなる。冷媒は冷凍サイクル中で最も温度が低い場所で滞留し、液冷媒として溜まるため温度の上昇時に圧縮機1内に冷媒が溜まる。そこで、寝込み判定部32は、To>Tcとなった場合には、冷媒が圧縮機1内に滞留していると判断して1を出力して加熱を開始し、To<Tcとなった場合に加熱を停止する。なお、外気温度Toが上昇傾向の時や、圧縮機1の温度Tcが上昇傾向の時に加熱を開始するよう制御しても制御としてよく、外気温度Toもしくは圧縮機1の温度Tcの検出が困難になった場合にいずれか1つを用いて制御ができるため信頼性の高い制御が実現できる。
ここで、圧縮機1の温度Tcおよび外気温度Toの両方が検出不可能になった場合、圧縮機1の加熱ができなくなるおそれがある。そこで、経過時間計測部33は、圧縮機1を加熱していない時間(Elapse_Time)を計測し、時間比較部34にて予め設定した制限時間Limit_Timeを超過した場合に1を出力して圧縮機1の加熱を開始する。ここで、一日の温度変化は太陽が昇る朝から昼にかけて温度が上昇し、日没から夜にかけて温度が低下するため、おおよそ12時間周期で温度の上昇低下が繰り返される。そのため、例えば、Limit_Timeを12時間程度に設定しておけばよい。なお、Elapse_Timeは、圧縮機1への加熱を行った場合にリセット部35にてElapse_Timeを0に設定する。
論理和計算部36は、以上の寝込み判定部32と時間比較部34との出力値の論理和を出力する。寝込み判定部32と時間比較部34との出力値のいずれか一方でも加熱開始を表す1となった場合には、論理和計算部36が1を出力して圧縮機1への加熱を開始させる。
第2論理積計算部37は、第1論理積計算部31と論理和計算部36との出力値の論理積を、加熱判定部12の出力値として出力する。出力値が1の場合には、高周波電圧発生部11を動作させ、圧縮機1の加熱動作を行う。一方、出力値が0の場合には、高周波電圧発生部11を動作させず、圧縮機1の加熱動作をしない、あるいは、高周波電圧発生部11の動作を停止させ、圧縮機1の加熱動作を止める。第2論理積計算部37で論理積を出力するため、第1論理積計算部31にて圧縮機1への加熱停止の信号0が出力されている場合には、論理和計算部36が加熱開始の信号1が出力されていても、加熱を停止させることができる。そのため、信頼性を確保しつつ、待機中の消費電力を最小限に抑えることが可能なヒートポンプ装置を得ることができる。
なお、寝込み判定部32は、圧縮機1の温度Tcと外気温度Toとに基づいて、圧縮機1内に液冷媒がどの程度滞留したかを検出可能であるため、検出した液冷媒の量に応じて、冷媒を圧縮機1の外部へ追い出すのに必要な熱量(電力)を算出し、必要最小限の加熱を行うよう高周波電圧発生部11を動作させることで、消費電力削減による地球温暖化への影響を低減することが可能となる。
続いて、圧縮機1の運転周波数以上の周波数スペクトルを拡散した高周波電圧をインバータ9からモータ8に印加する場合の、スペクトル拡散電圧指令生成部13におけるスペクトル拡散の方法について以下説明する。スペクトル拡散電圧指令生成部13での、電圧指令生成部25の電圧指令値Vu*,Vv*,Vw*の生成方法、およびPWM信号生成部26のPWM信号の生成方法について説明する。スペクトル拡散を行う場合、電圧指令値Vu*,Vv*,Vw*は、オフセットOFFSETを持たせた式(4)〜式(6)の余弦波(正弦波)と定義する。各式へのオフセットOFFSETの大きさは同一である。ただし、V*は電圧指令値の振幅、θは電圧指令値位相である。
(4)Vu*=V*cosθ+OFFSET
(5)Vv*=V*cos(θ−(2/3)π)+OFFSET
(6)Vw*=V*cos(θ+(2/3)π)+OFFSET
ここで、OFFSET=0、θをキャリアの頂と底で0deg、180degと切り替えた場合の動作波形を図14に示す。図14は、ゼロベクトルV0の比率が50%の場合のタイミングチャートである。図5に示す電圧出力を行わない電圧ベクトルV0とV7(ゼロベクトルと称す)の関係はV0=V7となる。この場合のU相電流の周波数スペクトルは、特定の周波数のn倍(nは自然数)にピークが発生し、高周波数側でも大きなピークの電流が発生するため、高周波数のノイズ(雑音端子電圧など)が発生し、国際的な規格などに適合しない課題がある。
そこで、電圧指令生成部25では、図15に示すように、無通電区間であるゼロベクトルV0とV7の比率を、振幅Am、変調周波数fmで時間の経過とともに正弦波状に変化させる。図15は、ゼロベクトルV0の比率を正弦波状に可変する方法を示す図である。無通電区間(ゼロベクトルV0とV7の和を100%とする)に対するゼロベクトルV0の比率を示すものである。また、図16は、ゼロベクトルV0の比率が50%以外の場合のタイミングチャートである。図16に示すようにOFFSETを変化させることで、キャリア信号に対する電圧指令値Vu*,Vv*,Vw*の関係が変化し、電圧を出力する電圧ベクトルV3とV4(実ベクトルと称す)の関係は維持した状態で、高周波電圧の1周期の中でのゼロベクトルV0とV7の比率を変化させることが可能となる。
電圧指令生成部25が、図15に示すようにゼロベクトルV0とV7の比率を正弦波状に変化させることで、U相電流の周波数スペクトルの高周波成分のピークを拡散させることが可能となる。なお、UV間電圧Vuvだけでなく、他の相の電流、電圧についても同様に周波数スペクトルが拡散することは言うまでもない。
よって、ヒートポンプ装置100では、電圧指令生成部25において電圧指令値Vu*,Vv*,Vw*のOFFSETを変化させるという簡易な方法で、高周波数のノイズのレベルを低減することができる。ヒートポンプ装置100は、ノイズフィルタなどを強化する必要が無くなるため、コストを増加させること無く国際的な規格などに適合させることが可能だけでなく、小型軽量化が可能となる。
しかし、ゼロベクトルV0またはV7の時間が短くなると、実ベクトルであるV3からV4、またはV4からV3に切り替わる際の、ゼロベクトル区間が短くなる。本来、電圧出力を行う実ベクトルにより発生した際のエネルギーを、ゼロベクトル区間でエネルギーを環流させることで電流を維持させることができなくなる。図17は、ゼロベクトルV0の比率と電力の関係を示す図である。図17に示すようにゼロベクトルV0の比率が小さい(ゼロベクトルV0区間が短い)、またはゼロベクトルV0の比率が大きい(ゼロベクトルV7の区間が短い)場合には、投入できる電力が小さくなる。
また、使用するマイクロコンピュータ(マイコン)によっては、ゼロベクトル区間が短くなると、2つのスイッチング素子(18aと18d、18bと18e、18cと18f)が同時にON状態とならないよう設けられる短絡防止時間(デッドタイム)の影響により、全スイッチング素子(18aと18d、18bと18e、18cと18f)が全てオフとなる区間が発生する。全てオフ状態となると、圧縮機1のモータ8に蓄えられたエネルギーが環流ダイオード19a〜19fを介して、平滑コンデンサ16に回生される。これにより、モータ8に蓄えられたエネルギーが平滑コンデンサ16に移動するため、モータ8の加熱が終了するため、投入電力が小さくなる。
ゼロベクトルV0とV7の比率を正弦波状に変化させる場合には、図18に示すように振幅Amを大とすると、平均電力が減少してしまう。図18は、振幅Amと平均電力との関係を示す図である。図15において、ゼロベクトルV0の比率50%を起点とした振幅Am(最大は50%)の大きさを示すものである。そのため、電圧指令生成部25では、振幅AmはAm_limitを上限として制限することが望ましい。なお、Am_limitは各種マイコンによるキャリアの生成方法や、2つのスイッチング素子(18aと18d、18bと18e、18cと18f)が同時にON状態とならないよう設けられる短絡防止時間(デッドタイム)などを加味して決定することが望ましい。
しかしながら、デッドタイムを設けると、インバータ9が出力する電圧が小さくなると、スイッチング素子18a〜18fをオンする時間が短くなる。例えば、スイッチング素子18a〜18fのうち何れかが故障し、2つのスイッチング素子(18aと18d、18bと18e、18cと18f)が同時にオン状態となると、同時にオンしている時間が短くなり、保護回路(図示せず)の遅延時間などにより保護が動作しない状況となる。そのため、インバータ制御部10では、インバータ9の出力電圧を一定以上確保する制御が望ましい。
また、U相電流の直流電流量は図19に示す通り、ゼロベクトルV0の比率を変化に応じて変化する。図19は、ゼロベクトルV0の比率と直流電流量の関係を示す図である。過大な直流電流が発生すると、インバータ9の破壊や、インバータ9を構成するスイッチング素子18a〜18fや、環流ダイオード19a〜19fに発生する損失が大きくなる。そのため、電圧指令生成部25では、正弦波状に変化させる場合の振幅Amは50%を中心として変化させることにより、直流電流量は正および負に変化することになるため、直流電流量を相殺することが可能となる。これにより、インバータ9の破壊や、損失の悪化を抑制することが可能となる。
さらに、変調周波数fmは、高いほど周波数スペクトルを拡散する周期が短くなるため、ノイズ低減には効果が高い。ただし、変調周波数fmについては、人間の可聴周波数の下限値である数十Hz程度で制御することで、ノイズ低減効果を最大限に発揮しつつ、騒音の発生も抑制することが可能となる。
また、ゼロベクトルV0とV7の比率を正弦波状に変化させる場合、電流波形は周期性を持つため、圧縮機1内のモータ8の電流や電力も安定して制御することが可能である。特に、電流や電力を検出してフィードバック制御を行う場合に、変調周波数fmの周期で電力を平均化することにより、安定して制御を行うことが可能となるメリットがある。
今回、電圧指令生成部25において、ゼロベクトルV0とV7の比率を正弦波状に変化させる場合について説明したが、三角波や矩形波、図20に示すランダムに比率を変化させても同様の効果が得られることは言うまでもない。図20は、ゼロベクトルV0の比率をランダムに可変する方法を示す図である。例えば、1秒区間のゼロベクトルV0とV7の比率をランダムに可変させ、次の1秒区間では同様にゼロベクトルV0とV7の比率を可変させるように周期性を持たせる。電圧指令生成部25は、ゼロベクトルV0の比率を、例えば、1秒区間で加算したときに50%となるようなパターンでランダム化する。これにより、直流電流の発生も抑制することが可能となり、正弦波状に変化させた場合と同様の効果を得ることが可能となる。
このように、ヒートポンプ装置100では、電圧指令生成部25がゼロベクトルV0とV7の比率を変化させることにより、モータ8に流れる電流の周波数スペクトルを拡散できる。また、圧縮機1内の冷媒は誘電体であるため、高周波数でのインピーダンスが低く、高周波電流を流しやすくなり、圧縮機1に触れると感電のおそれがある。本実施の形態によれば、高周波電流のスペクトルを拡散できるため、高周波電流量のレベルを低減することが可能となり、感電のおそれを低減することが可能となり、安全性の高いヒートポンプ装置100を得ることが可能となる。
なお、圧縮機1の運転周波数以上の周波数スペクトルを拡散した高周波電圧をインバータ9からモータ8に印加する場合のスペクトル拡散方法として、ゼロベクトルV0とV7の比率を変化させる方法について説明したが、これに限定するものではない。例えば、スペクトル拡散電圧指令生成部13において、PWM信号生成部26が、図14に示すキャリア信号の周波数を可変することにより、U相電流Iuの周期を長く、また、短くすることができ、時間の経過とともに周波数を変化させることが可能である。そのため、ゼロベクトルV0とV7の比率を変えることなく、周波数スペクトルを拡散することが可能である。この場合、PWM信号生成部26では、インバータ9のスイッチング素子18a〜18fのうち、上側スイッチング素子群18a〜18cと下側スイッチング素子群18d〜18fのスイッチング周波数を時間の経過とともに変化させることができ、高周波電流のスペクトルを拡散することができる。
この場合においても、キャリア信号の周波数を正弦波や三角波などとして周期性を持たせ、または、ランダムに可変することで、ゼロベクトルV0とV7の比率を変化させた場合と同様の効果が得られることは言うまでもない。この方式の場合、印加する電圧の基本周波数が変化するため、モータ8の巻線インピーダンスが変化し、流れる電流が変化する。そのため、電力も変化するため、電圧指令生成部25が周波数に応じた電圧指令を与えることにより、問題を解決することが可能である。ただし、処理が複雑となるため、PWM信号生成部26では、平均周波数における電圧指令を用いて常に一定の電圧指令で動作する。これにより、周波数が平均周波数より高い場合は電力が減少するが、平均周波数より低い場合は電力が増加するため、時間平均で見れば一定の電力で加熱を行うことが可能である。
次に、インバータ制御部10の動作について説明する。図21は、実施の形態1におけるインバータ制御部10の動作を示すフローチャートである。
(ステップS1:加熱判断ステップ)
加熱判定部12は、圧縮機1の運転停止中に、上述した動作により高周波電圧発生部11を動作させるかを判断する。高周波電圧発生部11を動作させると加熱判定部12が判断した場合、すなわち、加熱判定部12の出力値が1(オン)の場合(ステップS1:Yes)、処理をステップS2へ進め、予熱用のPWM信号を発生させる。一方、高周波電圧発生部11を動作させないと加熱判定部12が判断した場合、すなわち、加熱判定部12の出力値が0(オフ)の場合(ステップS1:No)、加熱判定部12は、所定時間経過後に、再び高周波電圧発生部11を動作させるかを判断する。
(ステップS2:電圧指令値生成ステップ)
選択部23は、電圧指令値V*と基準位相θfとを選択し、また、位相θpまたは位相θnを選択する。加算部27は、選択部23が選択した基準位相θfと位相θpまたは位相θnを加算することで電圧指令値位相θを求める。そして、電圧指令生成部25は、電圧指令値V*と、電圧指令値位相θと、オフセットOFFSETと、に基づいて、式(4)〜式(6)により任意のオフセットOFFSETで電圧指令値Vu*,Vv*,Vw*を計算し、計算した電圧指令値Vu*,Vv*,Vw*をPWM信号生成部26へ出力する。
(ステップS3:PWM信号生成ステップ)
PWM信号生成部26は、電圧指令生成部25が出力した電圧指令値Vu*,Vv*,Vw*とキャリア信号とを比較して、PWM信号UP,VP,WP,UN,VN,WNを得て、インバータ9へ出力する。これにより、インバータ9のスイッチング素子18a〜18fを駆動してモータ8に高周波電圧を印加する。
ヒートポンプ装置100では、インバータ9からモータ8に高周波電圧を印加することにより、モータ8の鉄損と、巻線に流れる電流にて発生する銅損とで効率よくモータ8が加熱される。モータ8が加熱されることにより、圧縮機1内に滞留する液冷媒が加熱されて気化し、圧縮機1の外部へと漏出する。加熱判定部12は、所定の時間経過後、再びステップS1へ戻り、さらに加熱が必要かを判定する。
以上説明したように、実施の形態1に係るヒートポンプ装置100では、圧縮機1内に液冷媒が滞留した状態である場合に、インバータ制御部10の制御により、インバータ9は圧縮機1の運転周波数以上の周波数スペクトルを拡散した高周波電圧をモータ8へ印加することとした。これにより、騒音の抑制、および雑音端子電圧などのノイズの発生を抑えつつ、効率的にモータ8を加熱して、圧縮機1内に滞留した冷媒を効率的に加熱・気化することができ、滞留した冷媒を圧縮機1の外部へ漏出させて圧縮機1の破損を防止することができる。
なお、圧縮動作時の運転周波数以上の高周波電圧をモータ8に印加すれば、モータ8内のロータが周波数に追従できなくなり、回転や振動が発生することが無くなる。そこで、ステップS2において、選択部23は、圧縮動作時の運転周波数以上となる基準位相θfを出力するのがよい。一般に、圧縮動作時の運転周波数は1kHzである。そのため、1kHz以上の高周波電圧をモータ8に印加すればよい。また、14kHz以上の高周波電圧をモータ8に印加すれば、モータ8の鉄心の振動音がほぼ可聴周波数上限に近づくため、騒音の低減にも効果がある。そこで、例えば、選択部23は、20kHz程度の高周波電圧となるような基準位相θfを出力する。
ただし、高周波電圧の周波数はスイッチング素子18a〜18fの最大定格周波数を超えるとスイッチング素子18a〜18fの破壊による負荷もしくは電源短絡を起こし、故障に至る可能性がある。そのため、信頼性を確保するため、高周波電圧の周波数はスイッチング素子18a〜18fの最大定格周波数以下にすることが望ましい。
また、近年のヒートポンプ装置用の圧縮機のモータには高効率化のためIPM構造のモータや、コイルエンドが小さく巻線抵抗の低い集中巻きモータが広く用いられる。集中巻きモータは、巻線抵抗が小さく銅損による発熱量が少ないため、巻線に多量の電流を流す必要がある。巻線に多量の電流を流すと、インバータ9に流れる電流も多くなり、インバータ損失が大きくなる。そこで、上述した高周波電圧印加による加熱を行うと、高周波数によるインダクタンス成分が大きくなり、巻線インピーダンスが高くなる。そのため、巻線に流れる電流が小さくなり銅損は減るものの、その分高周波電圧印加による鉄損が発生し効果的に加熱することができる。さらに、巻線に流れる電流が小さくなるため、インバータに流れる電流も小さくなり、インバータ9の損失も低減でき、より効率の高い加熱が可能となる。
また、上述した高周波電圧印加による加熱を行うと、圧縮機1がIPM構造のモータである場合、高周波磁束が鎖交するロータ表面も発熱部となる。そのため、冷媒接触面増加や圧縮機構への速やかな加熱が実現されるため効率の良い冷媒の加熱が可能となる。
また、インバータ9を構成するスイッチング素子18a〜18fと、これに並列に接続された環流ダイオード19a〜19fには、現在一般的には珪素(Si)を材料とする半導体を用いるのが主流である。しかし、これに代えて、炭化珪素(SiC)や窒化ガリウム(GaN)、ダイヤモンドを材料とするワイドギャップ半導体を用いてもよい。
このようなワイドバンドギャップ半導体によって形成されたスイッチング素子18a〜18fや環流ダイオード19a〜19fは、耐電圧性が高く、許容電流密度も高い。そのため、スイッチング素子18a〜18fや環流ダイオード19a〜19fの小型化が可能であり、これら小型化されたスイッチング素子18a〜18fや環流ダイオード19a〜19fを用いることにより、これらの素子を組み込んだ半導体モジュールの小型化が可能となる。
また、このようなワイドバンドギャップ半導体によって形成されたスイッチング素子18a〜18fや環流ダイオード19a〜19fは、耐熱性も高い。そのため、図示しないヒートシンクの放熱フィンの小型化や、水冷部の空冷化が可能であるので、半導体モジュールの一層の小型化が可能になる。
さらに、このようなワイドバンドギャップ半導体によって形成されたスイッチング素子18a〜18fや環流ダイオード19a〜19fは、電力損失が低い。そのため、スイッチング素子18a〜18fや環流ダイオード19a〜19fの高効率化が可能であり、延いては半導体モジュールの高効率化が可能になる。
また、高周波数でのスイッチングが可能となるため、モータ8に更に高周波数の電流を流すことが可能となり、モータ8の巻線インピーダンス増加による巻線電流低減によりインバータ9へ流れる電流を低減できるため、より効率の高いヒートポンプ装置を得ることが可能となる。さらに高周波数化がしやすくなるため、可聴周波数を超える周波数を設定しやすく、騒音対策がしやすくなるといった利点がある。
なお、スイッチング素子18a〜18fおよび環流ダイオード19a〜19fの両方がワイドバンドギャップ半導体によって形成されていることが望ましいが、いずれか一方の素子がワイドバンドギャップ半導体によって形成されていてもよく、この実施の形態に記載の効果を得ることができる。また、スイッチング素子18a〜18fのうち、上側スイッチング素子群のスイッチング素子18a〜18c、または下側スイッチング素子群のスイッチング素子18d〜18fの少なくとも一方をワイドバンドギャップ半導体によって形成されていてもよい。
その他、高効率なスイッチング素子として知られているスーパージャンクション構造のMOSFET(Metal−Oxide−Semiconductor Field−Effect Transistor)を用いることでも同様の効果を得ることが可能である。
また、スクロール機構の圧縮機は、圧縮室の高圧リリーフが困難である。そのため、他の方式の圧縮機に比べ、液圧縮した場合に圧縮機構に過大なストレスが掛かり破損する可能性が高い。しかし、実施の形態1のヒートポンプ装置100では、圧縮機1の効率の良い加熱が可能であり、圧縮機1内の液冷媒の滞留を抑制することできる。そのため、液圧縮を防止することができるので、圧縮機1としてスクロール圧縮機を用いた場合にも効果的である。
さらに、周波数10kHz、出力50Wを超える加熱機器の場合、法令による制約を受ける場合もある。そのため、事前に50Wを超えないよう電圧指令値の振幅や周波数の調整を行うようにしてもよい。
なお、インバータ制御部10は、CPU(Central Processing Unit)やDSP(Digital Signal Processor)、マイクロコンピュータ(マイコン)の離散システムで構成可能であることは前述の通りで、他にアナログ回路やデジタル回路等の電気回路素子などで構成してもよい。
実施の形態2.
実施の形態2では、ヒートポンプ装置100の回路構成の一例について説明する。なお、例えば、図1等では、圧縮機1と、四方弁2と、熱交換器3と、膨張機構4と、熱交換器5とが冷媒配管6により順次接続されたヒートポンプ装置100について示した。実施の形態2では、より具体的な構成のヒートポンプ装置100について説明する。
図22は、実施の形態2に係るヒートポンプ装置100の構成を示す図である。また、図23は、実施の形態2に係るヒートポンプ装置100の冷媒の状態を示すモリエル線図である。図23において、横軸は比エンタルピ、縦軸は冷媒圧力を示す。
ヒートポンプ装置100は、圧縮機51と、熱交換器52と、膨張機構53と、レシーバ54と、内部熱交換器55と、膨張機構56と、熱交換器57とが配管により順次接続され、冷媒が循環する主冷媒回路58を備える。なお、主冷媒回路58において、圧縮機51の吐出側には、四方弁59が設けられ、冷媒の循環方向が切り替え可能となっている。また、熱交換器57の近傍には、ファン60が設けられる。また、圧縮機51は、実施の形態1で説明した圧縮機1であり、インバータ9によって駆動されるモータ8と圧縮機構7とを有する圧縮機である。さらに、ヒートポンプ装置100は、レシーバ54と内部熱交換器55との間から、圧縮機51のインジェクションパイプまでを配管により繋ぐインジェクション回路62を備える。インジェクション回路62には、膨張機構61、内部熱交換器55が順次接続される。熱交換器52には、水が循環する水回路63が接続される。なお、水回路63には、給湯器、ラジエータや床暖房等の放熱器等の水を利用する装置が接続される。
まず、ヒートポンプ装置100の暖房運転時の動作について説明する。暖房運転時には、四方弁59は実線方向に設定される。なお、この暖房運転とは、空調で使われる暖房だけでなく、水に熱を与えて温水を作る給湯も含む。
圧縮機51で高温高圧となった気相冷媒(図23の点1)は、圧縮機51から吐出され、凝縮器であり放熱器となる熱交換器52で熱交換されて液化する(図23の点2)。このとき、冷媒から放熱された熱により、流体利用装置である水回路63を循環する水が温められ、暖房や給湯に利用される。
熱交換器52で液化された液相冷媒は、膨張機構53で減圧され、気液二相状態になる(図23の点3)。膨張機構53で気液二相状態になった冷媒は、レシーバ54で圧縮機51へ吸入される冷媒と熱交換され、冷却されて液化される(図23の点4)。レシーバ54で液化された液相冷媒は、主冷媒回路58と、インジェクション回路62とに分岐して流れる。
主冷媒回路58を流れる液相冷媒は、膨張機構61で減圧され気液二相状態となったインジェクション回路62を流れる冷媒と内部熱交換器55で熱交換されて、さらに冷却される(図23の点5)。内部熱交換器55で冷却された液相冷媒は、膨張機構56で減圧されて気液二相状態になる(図23の点6)。膨張機構56で気液二相状態になった冷媒は、蒸発器となる熱交換器57で外気と熱交換され、加熱される(図23の点7)。そして、熱交換器57で加熱された冷媒は、レシーバ54でさらに加熱され(図23の点8)、圧縮機51に吸入される。
一方、インジェクション回路62を流れる冷媒は、上述したように、膨張機構61で減圧されて(図23の点9)、内部熱交換器55で熱交換される(図23の点10)。内部熱交換器55で熱交換された気液二相状態の冷媒(インジェクション冷媒)は、気液二相状態のまま圧縮機51のインジェクションパイプから圧縮機51内へ流入する。
圧縮機51では、主冷媒回路58から吸入された冷媒(図23の点8)が、中間圧まで圧縮、加熱される(図23の点11)。中間圧まで圧縮、加熱された冷媒(図23の点11)に、インジェクション冷媒(図23の点10)が合流して、温度が低下する(図23の点12)。そして、温度が低下した冷媒(図23の点12)が、さらに圧縮、加熱され高温高圧となり、吐出される(図23の点1)。
なお、インジェクション運転を行わない場合には、膨張機構61の開度を全閉にする。つまり、インジェクション運転を行う場合には、膨張機構61の開度が所定の開度よりも大きくなっているが、インジェクション運転を行わない際には、膨張機構61の開度を所定の開度より小さくする。これにより、圧縮機51のインジェクションパイプへ冷媒が流入しない。ここで、膨張機構61の開度は、マイクロコンピュータ等の制御部により電子制御により制御される。
次に、ヒートポンプ装置100の冷房運転時の動作について説明する。冷房運転時には、四方弁59は破線方向に設定される。なお、この冷房運転とは、空調で使われる冷房だけでなく、水から熱を奪って冷水を作ることや、冷凍等も含む。
圧縮機51で高温高圧となった気相冷媒(図23の点1)は、圧縮機51から吐出され、凝縮器であり放熱器となる熱交換器57で熱交換されて液化する(図23の点2)。熱交換器57で液化された液相冷媒は、膨張機構56で減圧され、気液二相状態になる(図23の点3)。膨張機構56で気液二相状態になった冷媒は、内部熱交換器55で熱交換され、冷却され液化される(図23の点4)。内部熱交換器55では、膨張機構56で気液二相状態になった冷媒と、内部熱交換器55で液化された液相冷媒を膨張機構61で減圧させて気液二相状態になった冷媒(図23の点9)とを熱交換させている。内部熱交換器55で熱交換された液相冷媒(図23の点4)は、主冷媒回路58と、インジェクション回路62とに分岐して流れる。
主冷媒回路58を流れる液相冷媒は、レシーバ54で圧縮機51に吸入される冷媒と熱交換されて、さらに冷却される(図23の点5)。レシーバ54で冷却された液相冷媒は、膨張機構53で減圧されて気液二相状態になる(図23の点6)。膨張機構53で気液二相状態になった冷媒は、蒸発器となる熱交換器52で熱交換され、加熱される(図23の点7)。このとき、冷媒が吸熱することにより、水回路63を循環する水が冷やされ、冷房や冷凍に利用される。
そして、熱交換器52で加熱された冷媒は、レシーバ54でさらに加熱され(図23の点8)、圧縮機51に吸入される。
一方、インジェクション回路62を流れる冷媒は、上述したように、膨張機構61で減圧されて(図23の点9)、内部熱交換器55で熱交換される(図23の点10)。内部熱交換器55で熱交換された気液二相状態の冷媒(インジェクション冷媒)は、気液二相状態のまま圧縮機51のインジェクションパイプから流入する。圧縮機51内での圧縮動作については、暖房運転時と同様である。
なお、インジェクション運転を行わない際には、暖房運転時と同様に、膨張機構61の開度を全閉にして、圧縮機51のインジェクションパイプへ冷媒が流入しないようにする。
また、上記説明では、熱交換器52は、冷媒と、水回路63を循環する水とを熱交換させるプレート式熱交換器のような熱交換器であるとして説明したが、これに限定するものではなく、冷媒と空気を熱交換させるものであってもよい。また、水回路63は、水が循環する回路ではなく、他の流体が循環する回路であってもよい。