以下、添付図面を参照して、本発明の実施形態による車両運転支援システムについて説明する。まず、図1を参照して、車両運転支援システムの構成について説明する。図1は、車両運転支援システムの構成図である。
本実施形態の車両運転支援システム100は、車両1(図2等参照)のための走行経路を算出し、この走行経路を用いた運転支援制御を提供するように構成されている。システム100は、ステートラティス法を用いて複数の走行経路候補を計算し、これらの中からそれぞれの候補の経路コストに基づいて1つの走行経路候補を目標走行経路として選択する。
図1に示すように、車両1に搭載された車両運転支援システム100は、車両制御装置(ECU)10と、複数のセンサ及びスイッチと、複数の制御システムとを備えている。複数のセンサ及びスイッチには、車載カメラ21,ミリ波レーダ22,車両の挙動を検出する複数の挙動センサ(車速センサ23,加速度センサ24,ヨーレートセンサ25)及び複数の挙動スイッチ(操舵角センサ26,アクセルセンサ27,ブレーキセンサ28),測位システム29,ナビゲーションシステム30が含まれる。また、複数の制御システムには、エンジン制御システム31,ブレーキ制御システム32,ステアリング制御システム33が含まれる。
また、他のセンサ及びスイッチとして、車両1に対する周辺構造物の距離及び位置を測定する周辺ソナー、車両1の4箇所の角部における周辺構造物の接近を測定するコーナーレーダ、車両1の車室内を撮像するインナーカメラを含んでいてもよい。この場合、ECU10は、これらセンサ及びスイッチから測定信号/データを受信する。
ECU10は、CPU,各種プログラムを記憶するメモリ,入出力装置等を備えたコンピュータにより構成される。ECU10は、複数のセンサ及びスイッチから受け取った信号に基づき、エンジン制御システム31,ブレーキ制御システム32,ステアリング制御システム33に対して、それぞれエンジンシステム,ブレーキシステム,ステアリングシステムを適宜に作動させるための要求信号を出力可能に構成されている。
ECU10は、機能的には、走行路情報取得部11と、グリッド領域設定部12と、走行経路候補演算部13と、目標走行経路演算部14と、車両制御部15と、走行履歴情報記憶部16とを備えている。
走行路情報取得部11は、センサ及びスイッチから各種情報を取得し、これら情報に基づいて、車両1が走行する走行路に関する走行路情報を演算する。走行路情報には、走行路自体の形状に関する情報や、走行路上の対象物(障害物含む)に関する情報が含まれる。走行路形状に関する情報には、走行路の形状(直線、カーブ、カーブ曲率)、走行路幅、車線数、各車線幅等が含まれる。対象物に関する情報には、車両1に対する対象物の相対位置及び相対速度、対象物の属性(種類,移動方向)等が含まれる。
グリッド領域設定部12は、走行路情報に基づいて走行路上に仮想のグリッド領域(図4参照)を設定する。このグリッド領域は、複数のグリッド点を有する。各グリッド点により、走行路上の位置が特定される。
走行経路候補演算部13は、グリッド領域内の複数のグリッド点を用いた経路探索により複数の走行経路候補を演算する。本実施形態では、経路探索方法としてステートラティス法を採用している。ステートラティス法では、あるグリッド点から車両1の進行方向前方において隣接するすべてのグリッド点へ経路が枝分かれしていく。よって、各走行経路候補は、複数のグリッド点を順次に通過するように設定される。各走行経路候補は、各グリッド点を通過する時間を表す時間情報,各グリッド点での速度・加速度等に関する速度情報,その他車両運動に関する情報等も含む。
目標走行経路演算部14は、複数の走行経路候補から所定の条件に基づいて、経路コストが最小になる1つの走行経路を選択し、これを目標走行経路に設定する。
車両制御部15は、設定された目標走行経路上を車両1が走行するようにシステム31,32,33に対して、要求信号を出力する。
走行履歴情報記憶部16は、センサ及びスイッチから取得した各種情報に基づいて、車両1の過去の走行状態に関する走行履歴情報を作成し、メモリに記憶する。走行履歴情報は、例えば、車両運転支援システム100からの運転支援を受けていないときの走行状態から作成される。
走行履歴情報は、車両1が実際に走行した車線の幅方向の位置(例えば、幅方向中央からの幅方向の距離)の情報を含む。よって、走行履歴情報により、特に直線区間において、車両1が走行する幅方向の位置を特定することができる。例えば、車線内の幅方向位置のうち最も走行時間又は走行距離の割合が高い位置を特定することができる。
また、走行履歴情報は、特にカーブ区間中に車両1が走行した車線の幅方向の位置も含む。よって、走行履歴情報により、カーブ区間において、車両1が走行する幅方向の位置を特定することができる。例えば、カーブ区間内の入口区間,中央区間,出口区間等の各走行区間において、車線内の幅方向位置のうち最も走行時間又は走行距離の割合が高い位置をそれぞれ特定することができる。
車載カメラ21は、車両1の周囲を撮像し、撮像した画像データを出力する。ECU10(走行路情報取得部11)は、画像データに基づいて対象物(例えば、車両、歩行者、道路、区画線(車線境界線、白線、黄線)、交通信号、交通標識、停止線、交差点、障害物等)を特定する。なお、ECU10は、交通インフラや車々間通信等によって、車載通信機器を介して外部から対象物の情報を取得してもよい。これにより、対象物の種類,相対位置,移動方向等が特定される。
ミリ波レーダ22は、対象物(特に、先行車、駐車車両、歩行者、障害物等)の位置及び速度を測定する測定装置であり、車両1の前方へ向けて電波(送信波)を送信し、対象物により送信波が反射されて生じた反射波を受信する。そして、ミリ波レーダ22は、送信波と受信波に基づいて、車両1と対象物との間の距離(例えば、車間距離)や車両1に対する対象物の相対速度を測定する。なお、本実施形態において、ミリ波レーダ22に代えて、レーザレーダや超音波センサ等を用いて対象物との距離や相対速度を測定するように構成してもよい。また、複数のセンサを用いて、位置及び速度測定装置を構成してもよい。
車速センサ23は、車両1の絶対速度を検出する。
加速度センサ24は、車両1の加速度(前後方向の縦加減速度、横方向の横加速度)を検出する。
ヨーレートセンサ25は、車両1のヨーレートを検出する。
操舵角センサ26は、車両1のステアリングホイールの回転角度(操舵角)を検出する。
アクセルセンサ27は、アクセルペダルの踏み込み量を検出する。
ブレーキセンサ28は、ブレーキペダルの踏み込み量を検出する。
測位システム29は、GPSシステム及び/又はジャイロシステムであり、車両1の位置(現在車両位置情報)を検出する。
ナビゲーションシステム30は、内部に地図情報を格納しており、ECU10へ地図情報を提供することができる。ECU10(走行路情報取得部11)は、地図情報及び現在車両位置情報に基づいて、車両1の周囲(特に、進行方向前方)に存在する道路、交差点、交通信号、建造物等を特定する。地図情報は、ECU10内に格納されていてもよい。
エンジン制御システム31は、車両1のエンジンを制御するコントローラである。ECU10は、車両1を加速又は減速させる必要がある場合に、エンジン制御システム31に対して、エンジン出力の変更を要求するエンジン出力変更要求信号を出力する。
ブレーキ制御システム32は、車両1のブレーキ装置を制御するためのコントローラである。ECU10は、車両1を減速させる必要がある場合に、ブレーキ制御システム32に対して、車両1への制動力の発生を要求するブレーキ要求信号を出力する。
ステアリング制御システム33は、車両1のステアリング装置を制御するコントローラである。ECU10は、車両1の進行方向を変更する必要がある場合に、ステアリング制御システム33に対して、操舵方向の変更を要求する操舵方向変更要求信号を出力する。
次に、図2〜図6を参照して、本実施形態による運転支援制御処理について説明する。図2はグリッド領域の説明図、図3は初期グリッド点が設定されたグリッド領域の説明図、図4はグリッド点(不要な初期グリッド点は除去)が設定されたグリッド領域の説明図、図5は目標走行経路の説明図、図6は目標走行経路計算処理のフローチャートである。
図2〜図5では、車両1は走行路5上を走行している。このとき、ECU10は、図6の計算処理を繰返し計算する(例えば、0.05〜0.2秒毎)。走行路5は3車線あり(車線5a,5b,5c)、車両1は車線5bを走行している。
先ず、ECU10(走行路情報取得部11)は、複数のセンサ及びスイッチから各種情報を取得し、走行路情報を演算する情報取得処理を実行する(ステップS11)。
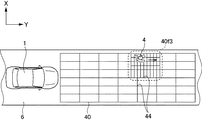
次に、図2に示すように、ECU10(グリッド領域設定部12)は、走行路情報に基づいて、走行路5の形状(即ち、走行路5の延びる方向,走行路幅等)を特定し、走行路5上にグリッド領域40を仮想的に形成するグリッド領域形成処理を実行する(ステップS12)。
グリッド領域40は、走行路5に沿って車両1の周囲から車両1の所定距離前方まで延びる。この距離(縦方向長さ)Lは、車両1の現在の車速に基づいて計算される。本実施形態では、距離Lは、現在の車速(V)で所定の固定時間t(例えば、3秒)に走行すると予想される距離である(L=V×t)。しかしながら、距離Lは、所定の固定距離(例えば、100m)であってもよいし、車速(及び加速度)の関数であってもよい。また、グリッド領域40の幅Wは、走行路5の幅に設定される。
グリッド領域40は、走行路5の幅方向(横方向)Xと延伸方向Yとに沿ってそれぞれ延びる複数のグリッド線41x,41yによって多数の矩形のグリッド区画42に分割される。本実施形態では、X方向及びY方向において、それぞれグリッド区画42の数(Nx,Ny)が固定値に設定され、隣接するグリッド線の間隔(グリッド間隔Gx,Gy)は同じに設定される(Gx=W/Nx、Gy=L/Ny)。しかしながら、グリッド間隔Gx,Gyを、それぞれ固定長さに設定し、グリッド区画の数を変更してもよい。
また、グリッド線41x,41yは、多数のグリッド交点43aで交差する。本実施形態では、このグリッド交点43aを走行経路設定のためのグリッド点として利用しており、走行経路はグリッド点を通過するように設定される。しかしながら、グリッド区画42自体をグリッド点として利用してもよい。
なお、図2では、走行路5が直線区間であるため、グリッド領域40(及びグリッド区画42)が矩形状に設定されている。しかしながら、グリッド線41yは走行路の延伸方向に沿って設定され、グリッド線41xはグリッド線41yに直交するように(走行路の幅方向に延びるように)設定される。このため、走行路5がカーブ区間を含む場合、グリッド領域40(及びグリッド区画42)もカーブ区間に沿って湾曲して設定される(図7参照)。この場合、グリッド区画42は、矩形状ではなく、中心側を欠いた扇形状に形成される。
次に、図3に示すように、ECU10(グリッド領域設定部12)は、グリッド領域40に初期グリッド点43を設定する初期グリッド点設定処理を実行する(ステップS13)。本実施形態では、各グリッド交点43aのうち、車両1の前端位置よりY方向前方に位置するグリッド交点43aが初期グリッド点43として設定される。なお、走行路5上に障害物が検知されている場合、初期グリッド点設定処理において、この障害物の存在する領域には初期グリッド点43を配置しなくてもよい。
そして、図4に示すように、ECU10(グリッド領域設定部12)は、初期グリッド点43に基づいて、走行経路候補の演算のためのグリッド点44を再設定するグリッド点再設定処理を実行する(ステップS14)。グリッド点再設定処理には複数の処理が含まれ、各処理の詳細については後述する。
図4では、グリッド点44(黒丸で示す)が、領域A1〜A4毎に異なったパターンで設定されている。また、グリッド点44は、非設定領域DL,DRには設定されていない。車両1の前方に延びる略楕円状の周囲領域A1では、隣接するグリッド点44の間のグリッド間隔が、初期グリッド点43のグリッド間隔Gx,Gyよりも大きく設定されている。これは、隣接するグリッド点44の間の初期グリッド点43が除去されたためである。
近位領域A2は、領域A1の外側に設定された外形略楕円状の環状領域である。領域A2でのグリッド間隔は、グリッド間隔Gx,Gyと同じである。また、遠位領域A3は、領域A2の外側に設定された外形略楕円状の環状領域である。領域A3でのグリッド間隔は、領域A1と同様に、グリッド間隔Gx,Gyよりも大きく設定されている。グリッド領域40内における領域A3の外側の遠位領域A4には、グリッド点44は設定されないか、領域A3よりも更にグリッド点密度が低く設定される。このように、再設定処理により、再設定されたグリッド点44の総数は、初期グリッド点43の総数よりも低減される。
次に、ECU10(走行経路候補演算部13)は、グリッド点44を用いて理論的に生成可能な複数の走行経路候補を演算する走行経路候補演算処理を実行する(ステップS15)。この処理は、従前のステートラティス法を用いた走行経路候補の演算と同様である。しかしながら、本実施形態では、初期グリッド点43から数が低減されたグリッド点44を用いて演算を行う。この点で、本実施形態は、従前とは異なっている。本実施形態では、数が低減されたグリッド点を用いるため、計算負荷が大幅に低減される。
走行経路候補演算処理の概略を説明する。ECU10は、車両1の近傍のグリッド点44を起点とする。このグリッド点44と進行方向(Y方向)前方に存在する複数のグリッド点44との間がそれぞれ分割経路で連結され、連結された各グリッド点44と更に進行方向前方に存在する複数のグリッド点44との間がそれぞれ分割経路で連結される。このような分割経路による連結が、領域A3の前方部分の境界に位置するグリッド点44(又は領域A4にグリッド点44が存在する場合は、領域A4の前方側境界)に到達するまで繰り返される。これにより、起点のグリッド点44から進行方向前方のグリッド点44を順次に通過して領域A3の前方部分に達する理論的に生成可能な多数の走行経路候補が生成される。そして、ECU10は、各走行経路候補に対して、通過する各グリッド点44における速度,加速度,操舵角等を演算すると共に、システム31,32,33に対する要求信号を演算する。このようにして、多数の走行経路候補が演算される。
次に、ECU10(目標走行経路演算部14)は、多数の走行経路候補から選択した1つの走行経路候補を目標走行経路に設定する目標走行経路演算処理を実行する(ステップS16)。この処理には、各走行経路候補の経路コストを計算する経路コスト計算処理(ステップS16a)と、経路コストが最小の走行経路候補を選択する走行経路選択処理(ステップS16b)と、選択した走行経路候補を目標走行経路に設定する目標走行経路設定処理(ステップS16c)とを含む。
経路コストには、速度,加速度,横加速度,経路変化率,障害物等に関するコストが含まれる。これらのコストは適宜に設定することができる。概略的には、経路コストは、移動コストと安全コストを含む。例えば、直線経路を走行する場合は、移動距離が短いため移動コストが小さくなるが、障害物等を回避する経路を走行する場合は、移動距離が長くなるので移動コストが大きくなる。また、横加速度が大きくなるほど移動コストは増大する。
また、例えば、障害物を大きく回避するような経路では、障害物との衝突を確実に回避できるため安全コストは小さくなるが、障害物近傍を通過するような経路では、安全コストは増大する。図5は、図2〜図4とは異なる例であるが、走行路5上に障害物3(例えば、駐車車両)が検出されている場合に選択される最小の経路コストの目標走行経路Rを示している。
次に、ECU10(車両制御部15)は、目標走行経路上を車両1が走行するように要求信号を出力する運転制御処理を実行し(ステップS17)、処理を終了する。
次に、図4,図7〜図12を参照して、本実施形態によるグリッド点再設定処理について説明する。図7,図8はそれぞれ第3処理,第4処理の説明図、図9及び図10は第5処理の説明図、図11及び図12は第6処理の説明図、である。なお、第1,第2処理については、図4を参照して説明する。なお、図7〜図12には、各処理の理解の容易のため特徴部分が主に示されている。
グリッド点再設定処理には、以下の複数の処理(第1処理〜第6処理)が含まれる。本実施形態では、第1処理から第6処理が順に実行される。しかしながら、ユーザは図示しない設定入力部を用いて、複数の処理のうち1以上の任意の数の処理を採用することができる。
第1処理は、図4に示すように、車両1の運動特性に基づいて、グリッド点44を設定する処理である。即ち、運動特性に基づいて、車両1が進入不可能な領域内の初期グリッド点43が除去される。具体的には、現在位置から機構上で最大の旋回角で旋回しても、車両1は、グリッド領域40の非設定領域DL,DRを走行することができない。このため、ECU10(グリッド領域設定部12)は、旋回性能に基づいて予め設定された略扇形状の非設定領域DL,DR内に存在する初期グリッド点43を除去する。
また、本実施形態では、非設定領域は、車両1の速度及び加速度を考慮せず、単に最大旋回角のみに基づいて設定されているが、速度及び加速度の関数として非設定領域が設定されてもよい。例えば、速度及び加速度に応じて、操作可能な最大の旋回角を設定してもよい。
次に、第2処理は、図4に示すように、運転者の視認特性に基づいて、グリッド点44を設定する処理である。即ち、グリッド領域40内に複数の領域A1〜A4が設定され、各領域に対して異なるグリッド間隔でグリッド点44が設定される。上述のように、領域A2では、すべての初期グリッド点43がグリッド点44として設定される。一方、領域A1,A3では、領域A2と比べてグリッド間隔がX方向及びY方向において、それぞれ2倍に設定されている。即ち、領域A2を基準にすると、領域A1,A3のグリッド点44の密度は、1/4に低減されている。
また、領域A4には、グリッド点44は設定されない。したがって、車両1の進行方向において、領域A2から離れるほど、グリッド間隔が大きくなり、グリッド点44の密度が疎になる。なお、本実施形態では、領域A4にグリッド点44が設定されていないが、領域A3よりも更にグリッド点44の密度を低減して、領域A4にグリッド点44を設定してもよい。
運転者視認特性に基づく領域A1〜A4は、以下のような先行車に対する運転者の視線行動と車両回避操作に関する実験に基づいて予め設定されたものである。この実験では、先行車が車両1の前方(斜め前方含む)に位置する状況で車両1を種々の車速で走行させ、走行中の運転者の視線方向と車両回避行動を観察した。この実験結果によれば、先行車が領域A4に存在する場合、運転者は、先行車に対して視覚的注意を行わなかった(即ち、視線方向がランダムであった)。
しかし、車両1の前方において、先行車が領域A3に到達すると、運転者の視覚的注意が始まった。即ち、視線が先行車へ集中し始め、視線方向の移動範囲が小さくなる。このような視覚的注意が始まるのは、車両1の進行方向上(真正面)において、車頭時間THW(=車間距離/車速)が3.0秒の地点(領域A3と領域A4の境界)であった(A3の楕円の長軸長さに相当)。
特に、先行車が車両1の斜め前方に位置する場合には、最大で0.3秒分(=横距離/車速)の走行距離(A3の楕円の短軸長さの半分に相当)だけ側方に離れた先行車に対して、視覚的注意が行われた。この距離は、車両1が先行車の側方を通過する場合の両車両間の横方向距離に相当する。これらの結果により、領域A3の外形を形成する楕円形状が特定された。
また、車両1の前方において、先行車が領域A2に到達すると、運転者は運転回避行動を開始した。即ち、ステアリングホイール,ブレーキペダル,アクセルペダルのいずれかの操作が開始される。このような操作が開始されるのは、車両1の進行方向上において、車頭時間THW(=車間距離/車速)が1.8秒の地点(領域A2と領域A3の境界)であった(A2の楕円の長軸長さに相当)。
特に、先行車が車両1の斜め前方に位置する場合には、最大で横方向の車間距離が1.5m(A2の楕円の短軸長さの半分に相当)だけ側方に離れた先行車に対して、運転回避行動が行われた。これらの結果により、領域A2の外形を形成する楕円形状が特定された。
また、車両1の前方において、先行車が領域A1に到達すると、運転者は緊急回避行動を行う。即ち、運転者は、先行車との衝突を回避するため、ステアリングホイールやブレーキペダルを急激に操作する。このような操作が開始されるのは、車両1の進行方向上において、衝突余裕時間TTC(=車間距離/相対速度)が1.4秒の地点(領域A1と領域A2の境界)であった(A1の楕円の長軸長さに相当)。同様に、先行車が車両1の側方に位置する場合においても同様に運転回避行動が開始される位置を観察することにより、領域A1の外形を形成する楕円形状が特定された。
領域A4は、運転者が視覚的注意を行わない領域である。このため、本実施形態では、領域A4は、走行経路の対象外としている。
また、領域A3は、視覚的注意が行われる領域であるが、対象物(先行車,障害物等)との衝突の危険は低い。このため、領域A3では、対象物との位置関係において細かな又は緻密な経路位置選択を行う必要性は低い。したがって、領域A3では、グリッド点44の密度が比較的疎に設定されている。
一方、領域A2は、運転回避行動が行われる領域である。このため、対象物との衝突を回避しつつ走行快適性を高く維持するため、領域A2では、より細かな又はより緻密な経路位置選択が可能であることが好ましい。したがって、領域A2では、グリッド点44の密度が比較的密に設定されている。
また、領域A1は、緊急回避行動が行われる領域である。このため、領域A1では、進路方向を大きく変更して対象物との衝突を確実に回避する必要がある。したがって、領域A1では、グリッド点44の密度が比較的疎に設定されている。なお、領域A1は必ずしも設けなくてもよく、領域A1を領域A2と同様にグリッド点44が比較的密な領域に設定してもよい。
このように、第2処理では、領域A1,A3,A4において領域A2よりもグリッド点44の密度を疎に設定することにより、全体としてグリッド点44の数を初期グリッド点43の数よりも低減している。なお、本実施形態では、初期グリッド点43が密に配置され(A2)、グリッド点44は、一部の初期グリッド点43を除去することにより、グリッド点密度が疎な領域(A1,A3,A4)が設定されている。しかしながら、これに限らず、初期グリッド点43を比較的疎に配置し(A1,A3)、グリッド点を追加することにより、グリッド点密度が密な領域(A2)を設定すると共に、一部の初期グリッド点43を除去することにより、グリッド点密度が疎な領域(A4)を設定してもよい。
次に、第3処理は、図7に示すように、走行路の形状に応じて、グリッド点44を設定する処理である。即ち、走行路の形状に起因して、より細かな又はより緻密な経路位置選択が望まれる領域と、そうでない領域とがある。このため、前者では、グリッド点が密に(グリッド間隔を小さく)設定され、後者では、グリッド点が疎に(グリッド間隔を大きく)設定される。例えば、カーブ区間において直線区間よりも、経路位置選択をより細かく行うことができれば、車両運動の多様性,安全性,走行快適性等がより高められると考えられる。
図7では、走行路6は、直線区間6A,カーブ区間6B,直線区間6Cを含む。グリッド領域40は、走行路6の延伸方向に沿って設定されている。ECU10は、カーブ区間6Bを特定すると、グリッド領域40のうち、このカーブ区間6B及びその前後の所定距離Mの区間に対応した領域(カーブ区間6Bの直前の入口領域,直後の出口領域)にグリッド領域40aを設定し、このグリッド領域40aの前後にグリッド領域40b,40cを設定する。
グリッド領域40a内ではグリッド点44は比較的密に配置され、グリッド領域40b,40c内ではグリッド点44は比較的疎に配置される。図7に示す例では、グリッド領域40aにおける進行方向Yに沿うグリッド間隔が、グリッド領域40b,40cのグリッド間隔の1/2に設定されている。また、これに加えて又はこれに代替して、グリッド領域40aにおける幅方向Xに沿うグリッド間隔が、グリッド領域40b,40cのグリッド間隔よりも小さく設定されてもよい。また、カーブ区間6Bの曲率半径が小さいほど、グリッド領域40aにおけるグリッド間隔が小さく設定されてもよい。
また、グリッド領域40aにおいて、カーブ中心側ほどグリッド点44が密に配置される(即ち、グリッド間隔がより小さく設定される)。具体的には、カーブ中心側ほど、幅方向Xのグリッド間隔が小さく設定される。
なお、本実施形態では、第3処理において、追加のグリッド点を付加することにより、グリッド点の密度(又は、グリッド間隔)が異なる領域(グリッド領域40a)を設けている。しかし、代替的に、初期グリッド点43が設定された初期領域から一部の初期グリッド点を除去することにより、グリッド点の密度が異なる領域(グリッド領域40b,40c)を設けてもよい。
次に、第4処理は、図8に示すように、走行路上又は走行路近傍に検出された障害物に応じて、グリッド点44を設定する処理である。即ち、障害物の周囲領域では、より細かな又はより緻密な経路位置選択が望まれるため、グリッド領域の他領域と比べてグリッド間隔が小さく設定される。
図8に示す例では、走行路6上に障害物3が存在している。ECU10は、障害物3を特定すると、グリッド領域40において、障害物3の周囲領域40dを設定する。周囲領域40dは、障害物3の周囲(障害物3から所定距離の範囲)に設定される。周囲領域40dにおいて、障害物3に隣接する隣接領域40d1,隣接領域40d1の外側の外側領域40d2では、進行方向Yに沿うグリッド間隔が、周囲領域40dの外のグリッド領域40におけるグリッド間隔の1/3,1/2にそれぞれ設定されている。このように、本実施形態では、障害物3の周囲には、障害物3に近いほどグリッド間隔が小さく設定されている(グリッド点44がより密に配置される)。
なお、図8に示す例では、障害物3の横方向領域(幅方向X)及び前方/後方領域(進行方向Y)においてグリッド間隔を小さいグリッド間隔に変更している。しかしながら、これに限らず、障害物3を回避する経路をより細かく又はより緻密に選択可能とするため、少なくとも障害物3の横方向領域(幅方向X)において、グリッド間隔を小さいグリッド間隔に変更すればよい。
また、図8に示す例では、進行方向Yに沿うグリッド間隔を小さいグリッド間隔に変更している。しかしながら、これに加えて又は代替的に、幅方向Xに沿うグリッド間隔を小さいグリッド間隔に変更してもよい。特に、障害物3の横方向領域において、幅方向Xに沿うグリッド間隔を小さいグリッド間隔に変更してもよい。
また、周囲領域40dでのグリッド間隔の設定において、車両1の絶対速度又は対象物に対する相対速度が考慮されてもよい。例えば、絶対速度又は相対速度が大きいほど、グリッド間隔をより小さく設定することができる。ECU10は、絶対速度又は相対速度の関数としてグリッド間隔を設定可能である。
次に、第5処理は、図9に示すように、走行路上に検出された障害物に応じて、グリッド点44を設定する処理である。第5処理は、障害物が検出された場合に、第4処理に引き続いて実行される。障害物を回避して走行する場合、障害物の死角領域には他の(未検出の)障害物が存在する可能性がある。また、死角領域に進入すると横加速度が大きくなって走行快適性が低下するおそれがある。このため、死角領域に車両を進入させる必要性は低い。よって、障害物の死角領域には、グリッド点が設定されないか、グリッド領域の他領域と比べてグリッド間隔が大きく設定される。
図9に示す例では、走行路6上に障害物3が存在している。ECU10は、障害物3を特定すると、グリッド領域40において、車両1に対する障害物3の後方領域を死角領域40eに設定する。死角領域40eは、障害物3から所定距離後方(車両1の進行方向前方)までの範囲に設定される。死角領域40eでは、グリッド領域40内の他領域と比べて、進行方向X及び/又は幅方向Yに沿うグリッド間隔が大きく設定される。本実施形態では、死角領域40eにおいて、グリッド点44を設定しないことにより(即ち、初期グリッド点43は除去される)、グリッド間隔が拡大される。
なお、死角領域40eにおいて、障害物3から後方へ離れるほど、他領域のグリッド間隔に近づけるように、グリッド間隔を小さくしてもよい(即ち、障害物3に近いほど、グリッド間隔が大きくなる)。
また、死角領域40eにおけるグリッド間隔の設定において、車両1の絶対速度又は対象物に対する相対速度を考慮してもよい。例えば、絶対速度又は相対速度が大きいほど、グリッド間隔をより大きく(又はより小さく)設定することができる。ECU10は、絶対速度又は相対速度の関数として死角領域40eのグリッド間隔を設定可能である。
また、車両1の絶対速度又は対象物に対する相対速度を考慮して、死角領域40eの大きさを設定してもよい。例えば、絶対速度又は相対速度が大きいほど、障害物3からより後方まで死角領域40eを拡大することができる。ECU10は、絶対速度又は相対速度の関数として死角領域40eの延びる所定距離を設定可能である。
また、第5処理では、図8及び図10に示すように、走行路上又は走行路付近に存在する障害物の周囲領域のグリッド間隔が、障害物の属性に応じて、グリッド領域の他領域と異なって設定される。即ち、障害物の周囲領域において、障害物の属性に適合するようにグリッド点を設定することにより、より細かな又はより緻密な経路位置選択が可能となる。
図10(A)〜図10(C)に示す例では、走行路6付近に歩行者4が存在している。歩行者4は、図10(A)では走行路6近傍に止まった状態で立っており、図10(B)では走行路6を横断中であり、図10(C)では走行路6上を車両1の進行方向に向かって歩いている。
図8と図10(A)は、いずれも対象物が検知された場合であるが、図8では対象物が駐車車両3であり、図10(A)では対象物が歩行者4である。ECU10は、対象物の属性(この場合、対象物の種類として、車両又は歩行者)に応じて、周囲領域40d,40f1のグリッド間隔を設定する。即ち、歩行者4の方が、駐車車両4よりも周囲領域のグリッド間隔は小さく設定される。また、対象物の種類に応じて、周囲領域の大きさを変更してもよい。
なお、対象物の属性が移動体(車両,歩行者等)であるか静止体(落下物,工事フェンス等)であるかに応じて、周囲領域の大きさ及びグリッド間隔を設定してもよい。即ち、移動体の方が、静止体よりも周囲領域の大きさが大きく設定され、グリッド間隔が小さく設定される。
また、図10(A)〜図10(C)は、いずれも歩行者4が検知された場合であるが、図10(A)では歩行者4は静止しており、図10(B)では歩行者4は幅方向Xに移動しており、図10(C)では歩行者4は進行方向Yに移動している。ECU10は、対象物の属性(この場合、移動速度,移動方向)に応じて、周囲領域40f1,40f2,40f3の大きさ及びグリッド間隔を設定する。即ち、歩行者4が移動していると、移動方向前方に周囲領域が拡大される。また、移動方向前方の領域の方が、移動方向後方の領域よりも、グリッド間隔が小さく設定される。
また、図10(C)に示されているように、歩行者4の移動方向の後方領域よりも前方領域において、グリッド間隔が小さく設定される。これにより、対象物の前方領域において、より細かな又はより緻密な経路位置選択を実行可能となる。
また、歩行者4が移動しているか静止しているかにかかわらず、歩行者の移動予想方向の前方領域の方が、後方領域よりも、グリッド間隔を小さく設定するように構成してもよい。この場合の属性は、移動予想方向又は移動可能方向である。移動予想方向は、対象物(歩行者,車両等)の前方である。
また、周囲領域40f1〜40f3におけるグリッド間隔の設定において、車両1の絶対速度又は対象物に対する相対速度を考慮してもよい。例えば、絶対速度又は相対速度が大きいほど、グリッド間隔をより小さく設定することができる。ECU10は、絶対速度又は相対速度の関数としてグリッド間隔を設定可能である。
なお、第5処理は、障害物の状況に応じて異なる処理が行われる。このため、各処理には、優先順位が設定されている。例えば、障害物(移動体)の死角領域には、通常はグリッド点が設定されないが、死角領域が障害物の進行方向である場合には、この死角領域にグリッド点が設定される。
次に、第6処理は、図11(直線区間)及び図12(カーブ区間)に示すように、車両1の走行履歴情報に基づいて、特定の領域のグリッド間隔をグリッド領域の他領域と異なって設定する処理である。即ち、運転者の運転の好みや癖をグリッド間隔に反映させることにより、より運転者の嗜好に沿った経路位置選択が可能となる。
図11に示す例では、車両1は、走行路6の直線区間を走行している。ECU10は、走行履歴情報に基づいて、車両1が車線内において特定の幅方向位置を走行する傾向があるか否かを判定する。この判定処理では、例えば、所定期間分の直線区間についての走行履歴情報に基づいて、車両1が走行した車線内の幅方向位置の平均値を計算する。これにより、車両1が概ね走行する傾向があると予想される幅方向位置が特定される。なお、車線の幅方向位置を複数に分割して、各分割幅内を通過した時間又は距離の総計を計算し、最も走行時間又は走行距離の大きい1つの分割幅を特定してもよい。ECU10は、特定した幅方向位置が車線中央から所定距離以上、離間している場合に、特定の傾向があると判定する。
ECU10は、幅方向位置に関する特定の傾向があると判定すると、特定された幅方向位置付近のグリッド間隔(幅方向)が他の幅方向位置よりも小さくなるように、グリッド点44又は初期グリッド点43(図3参照)を所定の関数により座標変換する。これにより、図11に示すように、特定の領域40gにおけるグリッド幅(幅方向)が他領域よりも小さく設定される。
また、図12に示す例では、車両1は、走行路6のカーブ区間を走行している。ECU10は、車両1の前方にカーブ区間を検知すると、走行履歴情報に基づいて、車両1がカーブ区間の車線内において特定の幅方向位置を走行する傾向があるか否かを判定する。この判定処理では、例えば、ECU10がカーブ区間についての走行履歴情報に基づいて、カーブ区間の複数の走行区間(進行方向Yに沿った入口区間,中央区間,出口区間等)において車両1が走行した車線内の幅方向位置の平均値を計算する。これにより、車両1が概ね走行する傾向があると予想される各走行区間の幅方向位置が特定される。ECU10は、1以上の走行区間において、特定した幅方向位置が車線中央から所定距離以上、離間している場合に、特定の傾向があると判定する。
ECU10は、カーブ区間について幅方向位置に関する特定の傾向があると判定すると、各走行区間において特定された幅方向位置付近の幅方向のグリッド幅が他の幅方向位置よりも小さくなるように、初期グリッド点43を所定の関数により座標変換する。
図12に示す例は、車両1がカーブをアウトインアウトで走行する傾向がある場合に形成されるグリッド領域40を示している。この例(アウトインアウト)では、カーブ区間の入口区間40h1では、カーブ中心から離れた車線内の外側領域のグリッド間隔(幅方向)が小さく設定され、内側領域のグリッド間隔が相対的に大きく設定される。そして、カーブ区間内の中央区間40h2に近づくに連れて、車線内の内側領域のグリッド間隔(幅方向)が小さく設定され、外側領域のグリッド間隔が相対的に大きく設定される。なお、図示していないが、区間40h1と区間40h2の間にも1又は複数の区間が設定される。
なお、上記実施形態において、グリッド間隔を変更するため(又は、グリッド点の密度を変更するため)、初期グリッド点43に追加のグリッド点44を付加してもよいし、一部の初期グリッド点を除去してもよいし、これら両方を実行してもよい。
次に、本実施形態の車両運転支援システムの作用について説明する。
本実施形態では、グリッド領域設定部12が、走行路6付近の障害物3,4の周囲領域40d,40f1〜40f3におけるグリッド間隔を障害物の属性に応じて設定し、走行経路候補演算部13は、グリッド領域設定部12により設定されたグリッド点44を用いて走行経路候補を演算することができる(図8,図10(A)〜(C)参照)。したがって、障害物3,4を考慮せずにグリッド領域のグリッド点が設定される従来の場合と比べて、本実施形態では、障害物3,4付近において、適切な目標走行経路を演算することができる。
本実施形態では、属性は、障害物が移動体(車両,歩行者等)と静止体(落下物,工事用フェンス等)のいずれであるかであり、グリッド領域設定部12は、障害物が移動体である場合、障害物が静止体である場合と比べて、グリッド間隔を小さく設定する。これにより本実施形態では、仮に移動体が静止していても、移動しない静止体に比べて、移動可能である移動体のグリッド間隔が小さく設定される。このため、移動体の急な移動に備えて、より精密に又はより緻密に走行経路候補を演算することが可能となる。これにより、障害物付近において、適切な目標走行経路を演算することができる。
本実施形態では、グリッド領域設定部12は、障害物が移動体4である場合、周囲領域40f1〜40f3以外と比べて、移動体4が向いている方向で前方の領域におけるグリッド間隔を小さく設定する(図10(A)〜(C)参照)。これにより本実施形態では、仮に移動体4が静止していても、移動方向と想定される移動体4が向いている方向で前方の領域におけるグリッド間隔が小さく設定される。このため、移動体4の急な移動に備えて、前方の領域において、より精密に又はより緻密に走行経路候補を演算することが可能となる。これにより、障害物付近において、適切な目標走行経路を演算することができる。
本実施形態では、グリッド領域設定部12は、障害物4が移動体である場合、移動体4が向いている方向で後方の領域よりも移動体が向いている方向で前方の領域におけるグリッド間隔を小さく設定する(図10(C)参照)。これにより本実施形態では、移動方向と想定される移動体が向いている方向で前方の領域におけるグリッド間隔が、移動体が向いている方向で後方の領域におけるグリッド間隔よりも小さく設定される。このため、前方の領域において、より精密に又はより緻密に走行経路候補を演算することが可能となる。これにより、障害物付近において、適切な目標走行経路を演算することができる。
本実施形態では、属性は、障害物が歩行者か車両のいずれであるかであり、グリッド領域設定部は、障害物が歩行者である場合(図10(A)〜(C)参照)、障害物が車両である場合(図8参照)と比べて、グリッド間隔を小さく設定する。このように本実施形態では、車両よりも歩行者の方が将来の移動予測が困難であるため、車両よりも歩行者の方が、グリッド間隔が小さく設定される。