JP6603525B2 - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP6603525B2 JP6603525B2 JP2015184915A JP2015184915A JP6603525B2 JP 6603525 B2 JP6603525 B2 JP 6603525B2 JP 2015184915 A JP2015184915 A JP 2015184915A JP 2015184915 A JP2015184915 A JP 2015184915A JP 6603525 B2 JP6603525 B2 JP 6603525B2
- Authority
- JP
- Japan
- Prior art keywords
- presser
- sewing machine
- cloth presser
- neutral
- height
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Sewing Machines And Sewing (AREA)
Description
そして、布押さえを下降させる際には、ソレノイドを駆動しないか或いは推力を最小限として押さえバネのバネ圧により布押さえを行い、布押さえを上昇させる際には、ソレノイドを駆動して引き上げ動作を行っていた(例えば、特許文献1参照)。
さらに、ソレノイドを布押さえの昇降動作の駆動源とする場合、布押さえの上昇中は電力を供給し続けて布押さえを維持しなければならないので、電力消費量が大きくなるという問題も生じていた。
回転式の外周カムと、
前記外周カムの外周に当接する従節体と、
前記従節体を介して回動し、布押さえに昇降動作を伝える伝達体と、
前記外周カムを回転させる押さえモーターと、
前記押さえモーターを制御して前記布押さえの昇降動作を制御する制御装置とを備えることを特徴とする。
さらに、請求項1記載の発明は、
前記外周カムは、一周の中に、押さえ位置と中間位置と押さえ上げ位置の三段階の前記布押さえの高さに個別に対応し、その外径がそれぞれ一定となる三つの中立区間と、これら三つの中立区間の間に設けられた三つの変化区間とを有し、
それぞれの前記変化区間は、外径が異なる両側の前記中立区間の一方の前記中立区間の外径から他方の前記中立区間の外径に徐々に移行するように外径が変化していることを特徴とする。
前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置が、前記布押さえが前記操作手段の入力操作量に応じた高さとなるように前記押さえモーターを制御することを特徴とする。
前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置が、前記布押さえが前記操作手段の入力操作に応じて前記押さえ位置と前記中間位置と前記押さえ上げ位置のいずれかの高さとなるように前記押さえモーターを制御することを特徴とする。
前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置は、
前記布押さえが前記操作手段の入力操作量に応じた高さとなるように前記押さえモーターを制御するリニア制御を実行することを特徴とする。
前記外周カムは、
前記三つの中立区間としての第一中立区間、第二中立区間及び第三中立区間と、
前記三つの変化区間としての第一変化区間、第二変化区間及び第三変化区間とを有しており、
前記制御装置は、
前記リニア制御として、前記押さえ位置から前記中間位置までの範囲における第一のリニア制御と、前記押さえ位置から前記押さえ上げ位置までの範囲における第二のリニア制御のいずれかを選択して実行すると共に、
前記第一のリニア制御の際には、前記外周カムの前記押さえ位置に対応する前記第一中立区間と前記中間位置に対応する前記第二中立区間との間の前記第一変化区間を使用し、
前記第二のリニア制御の際には、前記外周カムの前記押さえ位置に対応する前記第一中立区間と前記押さえ上げ位置に対応する前記第三中立区間との間の前記第三変化区間を使用するように前記押さえモーターを制御することを特徴とする。
前記伝達体は、前記外周カムの回転中心側への回動により前記布押さえに下降動作を伝達し、
前記伝達体の前記外周カムの回転中心側への近接限界位置を調節することにより前記布押さえの下限位置を決定する調節手段を備えることを特徴とする。
また、布押さえの上下動を外周カムと押さえモーターとにより行うので、ソレノイドを駆動源とする場合のように二位置間での部材の移動による衝突や作動音が発生せず、静音化を図ると共に部材の損耗や破損の発生を低減することが可能となる。
また、外周カムを利用して布押さえの上下動を行うので、外周カムのカム形状の一部に回転中心から等径となる区間を設けた場合には、押さえモーターへの電源供給を低減又は停止しても従節体を一定の位置に保持することができるので、布押さえの上下動が行われ内題の電力消費量の低減を図ることが可能となる。
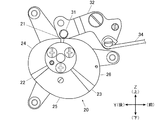
以下、図面を参照して、本発明にかかるミシンについて説明する。図1はミシンが有するミシンフレーム100と当該ミシンフレーム100内における押さえ上げ機構10の全体構成の配置を示す側面図である。
なお、本実施形態のミシンはいわゆる本縫いミシンであり、本発明の特徴的なミシンの押さえ上げ機構10について主に説明を行い、一般的な本縫いミシンが有する針上下動機構、布送り機構、釜機構、糸調子装置、天秤機構、糸切り装置については周知の構成と同一のものを備えているのでその説明は省略する。
ミシンベッド部101の前端部が針落ち位置となっており、その上面には針板104が装備されている。また、ミシンアーム部103の左端部には図示を省略した針棒が上下動可能な状態でZ軸方向に沿って支持されている。
押さえ上げ機構10は、布押さえ11と、布押さえ11を下端部で保持する押さえ棒12と、回転式の外周カム20と、外周カム20から布押さえ11に昇降動作を伝える伝達機構30と、外周カム20を回転させる押さえモーター14とを備えており、押さえモーター14はミシンの全体構成を制御する制御装置90によりその動作制御が行われる。
布押さえ11は、底面が平滑であって布送り方向上流側(手前側)が上方に反り上がったいわゆる舟形の押さえである。
押さえ棒12は、針棒の近傍においてZ軸方向に沿った状態でミシンアーム部103により上下動可能に支持されている。
押さえ棒12の上端部には棒抱き13が固定装備されている。押さえ棒12の上端部は棒抱き13を介して図示しない押さえバネにより下方に押圧されており、これにより押さえ圧を確保している。
また、棒抱き13は、右方に延出された角柱状の突起131を備えており、この突起131は後述するフック状の引き上げ板35に係止され、上方への引き上げ力が付与される。
伝達機構30は、外周カム20の外周に当接する従節体としてのコロ31と、コロ31を支持する伝達体としての主動リンク32と、当該主動リンク32に連動する従動リンク33と、主動リンク32と従動リンク33を連結する連結棒34と、従動リンク33に連結されると共に棒抱き13を介して押さえ棒12及び布押さえ11を引き上げる引き上げ板35とを備えている。
主動リンク32は、いわゆるベルクランクであり、段ネジを軸としてX軸回りに回動可能にミシンフレーム100内に支持されている。この主動リンク32は、段ネジを中心とする半径方向外側に向かって二方向に二本の腕部を備えている。一方の腕部は後斜め下側に延出されると共にその先端部でコロ31を支持しており、他方の腕部は前斜め下側に延出されると共に連結棒34の一端部がX軸回りに回動可能に連結されている。
押さえモーター14は、出力軸がX軸方向に平行且つ左方を向いた状態で立胴部102内に支持されており、押さえモーター14の左側には外周カム20を支持する支持ブラケット15が組み付けられている。
支持ブラケット15は、図2に示すように、外周カム20の左右両側に配置された一対のブラケット板151,152とこれらブラケット板151,152の間に外周カム20を介挿させるために間隔をあけた状態で連結する三本の支柱153とから構成されている。そして、右側のブラケット板152が押さえモーター14に固定されている。
また、ブラケット板151,152の双方により、押さえモーター14が回転可能に支持されており、図示しないモーターベアリングの負荷を低減可能としている。
これにより、押さえモーター14及び外周カム20を備えていない従来のミシンに対しても、上記ユニットを容易に取り付けることができ、押さえモーター14により布押さえ11の高さ制御を行うことが可能なミシンに容易に改造することが可能となっている。
外周カム20には、前述したように主動リンク32に支持されたコロ31が圧接しているので、その回転中心から外周までの距離(以下、変位という)の変動により主動リンク32を回動させることができる。前述した伝達機構30の構成の場合、外周カム20の変位が小さければ布押さえ11は下降し、外周カム20の変位が大きければ布押さえ11は上昇する。
上記「中立位置」は、布押さえ11が針板104から幾分上方に離れた高さであり、例えば、縫い針が被縫製物に刺さったままの状態で向きを変える等の作業を行う場合に、布押さえ11による押さえ圧を解除するための高さである。この「中間位置」は、「押さえ位置」と「押さえ上げ位置」の間の高さとなる。
上記「押さえ上げ位置」は、布押さえ11が針板104から十分上方に離れた高さであり、例えば、縫製終了後の被縫製物の撤去、交換等の作業の妨げとならないように布押さえ11を退避させる高さである。この「押さえ上げ位置」は「押さえ位置」及び「中間位置」よりも高い位置となる。
また、図3に示すように、第一中立区間21に対して第二中立区間22は反時計方向に位置し、第一中立区間21に対して第三中立区間23は時計方向に位置している。
なお、三つの中立区間21,22,23の角度幅は、三つの変化区間24,25,26に比べて狭くすることが望ましい。但し、少なくとも、押さえモーター14の駆動を停止した状態でコロ31が各中立区間21,22,23の外周に当接した状態を維持することが可能な程度の幅を有することが望ましい。
そして、第一変化区間24は、第一中立区間21の外径から第二中立区間22の外径に徐々に移行するように外径が変化している。
また、第二変化区間25は、第二中立区間22の外径から第三中立区間23の外径に徐々に移行するように外径が変化している。
また、第三変化区間26は、第三中立区間23の外径から第一中立区間21の外径に徐々に移行するように外径が変化している。
また、図3に示すように、第一変化区間24に対して第二変化区間25は反時計方向に位置し、第一変化区間24に対して第三変化区間26は時計方向に位置している。
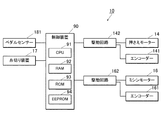
図4に押さえ上げ機構10を備えるミシンの制御系のブロック図を示す。
ミシンは、その構成の動作制御を行う制御装置90を備え、当該制御装置90に対して、布押さえ11の昇降動作の駆動源となる押さえモーター14及びその出力軸角度を検出するエンコーダー141、縫製動作の駆動源となるミシンモーター16及びその出力軸角度を検出するエンコーダー161がそれぞれの駆動回路142、162を介して接続されている。
また、制御装置90に対して、縫製終了時に上糸及び下糸を切断する糸切り装置17、作業者がミシンに対する操作入力を行う操作手段としての操作ペダル18からの操作量を検出するペダルセンサー181が接続されている。
操作ペダル18は、図5に実線で示す傾斜角度を中立位置としており、作業者が操作を行っていない状態ではこの中立位置に復帰するようにバネ圧が付与されている。
そして、制御装置90は、操作ペダル18の踏み込み量0〜Pfまでの前踏みの範囲では、ミシンモーター16を駆動して縫製を行う。また、この踏み込み量0〜Pfの範囲では、踏み込み量に応じてミシンモーター16の速度制御を行う。
また、制御装置90は、縫製途中において操作ペダル18の踏み込み量0(中立位置)が検出された場合には、針棒下位置(縫い針が被縫製物に刺さった状態)でミシンモーター16を停止させる制御を行う。
さらに、ペダルセンサー181が中立位置及び前踏みの範囲内では、制御装置90は、布押さえ11を押さえ位置に下ろした状態とする制御を行う。
即ち、ミシンが縫製途中の状態では、制御装置90は、操作ペダル18の後踏みの踏み込み量が0を超えてPn未満の範囲では、踏み込み量に応じた布押さえ11の高さ制御を実行し、踏み込み量がPn以上となると、糸切り装置17による糸切りを実行する。
また、ミシンが縫製途中ではない場合には、制御装置90は、操作ペダル18の後踏みの踏み込み量が0を超えてPeまでの全範囲で、踏み込み量に応じた布押さえ11の高さ制御を実行する。
即ち、ミシンの主電源の投入後、ミシンモーター16の駆動が行われるまでは「非縫製途中状態」と判断され、一回転でもミシンモーター16の駆動が行われると「縫製途中状態」となる。その後は、糸切りが実行されると、「縫製途中状態」が解除されて「非縫製途中状態」となり、一回転でもミシンモーター16の駆動が行われると「縫製途中状態」となる。その後は、主電源が落とされるまで、制御装置90によって、同様の判断が行われる。
上記制御装置90のCPU91による押さえ上げ機構10を主体とするミシンの動作制御について図6のフローチャートに基づいて詳細に説明する。
まず、ミシンの主電源が投入されると、制御装置90のCPU91は、ミシンが縫製途中状態か否かを判定する(ステップS1)。前述したように、CPU91は、ミシンモーター16の駆動履歴と糸切り装置17の実行履歴とから判断を行う。
そして、CPU91は、上記割り当てに基づいてペダルセンサー181の検出した踏み込み量Pbに対応する布押さえ11の高さを求め、当該高さとなる様に押さえモーター14の回転を制御する(ステップS19)。
そして、処理をステップS1に戻す。
さらに、CPU91は、上記割り当てに基づいてペダルセンサー181の検出した踏み込み量Pbが0<Pb≦Pnの範囲内か否かを判定する(ステップS3)。
そして、処理をステップS1に戻す。
ステップS7は、ミシンが縫製途中であって、ペダル後踏みの踏み込み量Pbは0<Pb≦Pnの範囲内であること、針棒が針棒下位置にあることを前提とする。
ミシンが縫製途中であるということは、針板上に被縫製物が存在し、縫製が現在実行中であることを示す。
ペダル後踏みの踏み込み量Pbが0<Pb≦Pnの範囲内であるということは、ミシンの使用者は、布押さえ11の高さを調節しようとしていることを示す
そして、針棒が針棒下位置にあるということは、縫い針が被縫製物に突き刺さった状態で停止していることを示す。
つまり、ステップS7に至る場合には、ミシンの使用者は、縫製途中で縫いを停止し、縫い針が突き刺さったままの状態で布押さえ11を押さえ位置より上に上昇させようとしており、一般には、被縫製物の向きを変える等の作業を行おうとしている状況にある可能性が高いことを意味している。
従って、このような場合には、制御装置90は、布押さえ11の高さ調節範囲を「押さえ位置」から「中間位置」までの範囲内で操作ペダル18によってリニア制御を行うことを可能とし、過剰に布押さえ11が上昇することなく、適度な範囲で任意に布押さえ11の高さ調節することができるように制御を行う。
そして、処理をステップS1に戻す。
ステップS9は、ミシンが縫製途中であって、ペダル後踏みの踏み込み量Pbは0<Pb≦Pnの範囲内であること、針棒が針棒下位置にはないことを前提とする。
つまり、ステップS9に至る場合には、ミシンの使用者は、縫製途中で縫いを停止し、縫い針が突き刺さっていない状態で布押さえ11を押さえ位置より上に上昇させようとしている。通常は、縫製途中で縫いを停止した場合には、制御装置90は、針棒が針棒下位置となるようにミシンモーター16を停止させる制御を行うが、それにも拘わらず、針棒が針棒下位置にないということは、人為的にプーリを回して針棒を上昇させた可能性が高いことを意味している。これには種々の要因が考えられるが、少なくとも針棒を針棒下位置よりも上に上昇させているということは、縫い針が作業の妨げになるので退避させていることが予想される。
従って、このような場合には、制御装置90は、布押さえ11の高さ調節範囲を「押さえ位置」から「押さえ上げ位置」までの範囲内で操作ペダル18によってリニア制御を行うことを可能とし、布押さえ11を十分に上方に退避させることが可能な範囲で任意に高さ調節することができるように制御を行う。
そして、ペダルの踏み込み量PbがPb>Pnである場合には(ステップS11:YES)、糸切りの実行の指示入力であると判断して、布押さえ11を押さえ位置まで下降させるように押さえモーター14を制御して(ステップS13)、さらに、糸切り装置17により糸切り動作を実行させる(ステップS15)。
そして、処理をステップS1に戻す。
そして、処理をステップS1に戻す。
押さえ上げ機構10は、外周カム20と従節体としてのコロ31と伝達体としての主動リンク32と押さえモーター14とを備え、ミシンは、押さえモーター14を制御して布押さえ11の昇降動作を制御する制御装置90を備えるので、布押さえ11を任意の高さに調節することが容易であり、縫製に関する種々の要請に対応して布押さえ11の高さ調節を行うことが可能となる。
また、布押さえ11の上下動を外周カム20と押さえモーター14とにより行うので、ソレノイドを駆動源とする場合のように二位置間での部材の移動による衝突や作動音が発生せず、静音化を図ると共に部材の損耗や破損の発生を低減することが可能となる。
また、三つの変化区間24,25,26との間で漸減的又は漸増的に外周が変化した三つの変化区間24,25,26とを有するので、押さえ位置と中間位置と押さえ上げ位置の各位置間での高さ調節を円滑に行うことが可能となる。
このため、第一及び第二のリニア制御の調節範囲内において布押さえ11の高さを漸増的又は漸減的に変化させる際に、いずれかの中立区間とコロ31とが当接する状態の発生を回避することができるので、途中で停止することなく、布押さえ11を円滑に昇降させることが可能となる。
図6に示した押さえ上げ機構10の動作制御では、ステップS7,S9,S19において、布押さえ11の高さについてリニア制御を実施しているが、これらは、押さえ位置と中間位置と押さえ上げ位置のいずれかの高さとなるように高さを段階的に調節する制御を行っても良い。
例えば、図6のステップS7では布押さえ11が中間位置となる様に押さえモーター14を制御し、ステップS9では布押さえ11が押さえ上げ位置となる様に押さえモーター14を制御し、ステップS19では布押さえ11が押さえ上げ位置となる様に押さえモーター14を制御しても良い。
これにより、外周カム20の三つの中立区間21,22,23の内のいずれかにコロ31を当接させることができ、その間は押さえモーター14への電源供給を低減又は停止することができるので、ミシンの電力消費を低減することが可能となる。
押さえ上げ機構10には、図7に示すように、微小押さえ上げの調節手段40を付加しても良い。
調節手段40は、伝達体としての主動リンク32の外周カム20の回転中心側への近接限界位置を調節することにより布押さえ11の下限位置を決定するためのものであり、例えば、ミシンフレームに設けられたZ軸方向に沿ったネジ穴41と当該ネジ穴41に螺合する調節ネジ42とからなる。
調節ネジ42は、その下端部が主動リンク32との当接端部となり、上端部は回転操作を行うための頭部となっている。頭部は手動で回転操作を行うためにローレット加工を施す、或いは、工具で回転操作を行うために外周が六角形状又は上端面に六角穴を設けてもよい。
調節ネジ42の下端部は、主動リンク32のコロ31を保持していない方の腕部に対して上方から当接し、調節ネジ42を回転操作することにより主動リンク32が時計周りに回動し、コロ31が外周カム20から離間する方向へ移動させることができる。
この調節手段40により、コロ31が外周カム20の回転中心側に最も近接する位置を当該回転中心に対して離間させることができ、その離間移動量に応じて、布押さえ11の下限位置(通常は押さえ位置が下限位置となっている)を押さえ位置よりも上方に移動調節することができる。
例えば、厚地の被縫製物に対して、布押さえ11の下限位置を押さえ位置よりも幾分上方、例えば、布厚よりも若干狭い隙間が生じる程度にシフトさせることにより、厚地の被縫製物を良好に送ることが可能となる。いわゆる、微小押さえ上げの調節が可能となる。
なお、上記ミシンでは、布押さえ11の上下動を糸切り装置と連動するように動作制御を行っているが(図6のステップS13及びS14)、布押さえ11の上下動のミシンの他の構成と連動させても良い。
例えば、針板の下側で縫製開始時の上糸の縫い開始端部を保持する糸掴み装置を備えるミシンに上記押さえ上げ機構10を装備した場合には、糸掴み装置が上糸の縫い開始端部を保持するタイミングで布押さえ11を一時的に上方に移動させて上糸が布押さえ11に押さえられないようにして、糸掴み装置が掴んだ上糸引き寄せる動作を円滑に行えるように構成してもよい。
11 布押さえ
14 押さえモーター
15 支持ブラケット
16 ミシンモーター
17 糸切り装置
18 操作ペダル
20 外周カム
21,22,23 中立区間
24,25,26 変化区間
30 伝達機構
31 コロ(従節体)
32 主動リンク(伝達体)
40 調節手段
42 調節ネジ
90 制御装置
100 ミシンフレーム
Claims (6)
- 回転式の外周カムと、
前記外周カムの外周に当接する従節体と、
前記従節体を介して回動し、布押さえに昇降動作を伝える伝達体と、
前記外周カムを回転させる押さえモーターと、
前記押さえモーターを制御して前記布押さえの昇降動作を制御する制御装置とを備え、
前記外周カムは、一周の中に、押さえ位置と中間位置と押さえ上げ位置の三段階の前記布押さえの高さに個別に対応し、その外径がそれぞれ一定となる三つの中立区間と、これら三つの中立区間の間に設けられた三つの変化区間とを有し、
それぞれの前記変化区間は、外径が異なる両側の前記中立区間の一方の前記中立区間の外径から他方の前記中立区間の外径に徐々に移行するように外径が変化していることを特徴とするミシン。 - 前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置が、前記布押さえが前記操作手段の入力操作量に応じた高さとなるように前記押さえモーターを制御することを特徴とする請求項1記載のミシン。 - 前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置が、前記布押さえが前記操作手段の入力操作に応じて前記押さえ位置と前記中間位置と前記押さえ上げ位置のいずれかの高さとなるように前記押さえモーターを制御することを特徴とする請求項1又は2に記載のミシン。 - 前記布押さえの高さを入力操作によって指示入力する操作手段を備え、
前記制御装置は、
前記布押さえが前記操作手段の入力操作量に応じた高さとなるように前記押さえモーターを制御するリニア制御を実行することを特徴とする請求項1又は2に記載のミシン。 - 前記外周カムは、
前記三つの中立区間としての第一中立区間、第二中立区間及び第三中立区間と、
前記三つの変化区間としての第一変化区間、第二変化区間及び第三変化区間を有しており、
前記制御装置は、
前記リニア制御として、前記押さえ位置から前記中間位置までの範囲における第一のリニア制御と、前記押さえ位置から前記押さえ上げ位置までの範囲における第二のリニア制御のいずれかを選択して実行すると共に、
前記第一のリニア制御の際には、前記外周カムの前記押さえ位置に対応する前記第一中立区間と前記中間位置に対応する前記第二中立区間との間の前記第一変化区間を使用し、
前記第二のリニア制御の際には、前記外周カムの前記押さえ位置に対応する前記第一中立区間と前記押さえ上げ位置に対応する前記第三中立区間との間の前記第三変化区間を使用するように前記押さえモーターを制御することを特徴とする請求項4記載のミシン。 - 前記伝達体は、前記外周カムの回転中心側への回動により前記布押さえに下降動作を伝達し、
前記伝達体の前記外周カムの回転中心側への近接限界位置を調節することにより前記布押さえの下限位置を決定する調節手段を備えることを特徴とする請求項1から5のいずれか一項に記載のミシン。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015184915A JP6603525B2 (ja) | 2015-09-18 | 2015-09-18 | ミシン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015184915A JP6603525B2 (ja) | 2015-09-18 | 2015-09-18 | ミシン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017056079A JP2017056079A (ja) | 2017-03-23 |
| JP6603525B2 true JP6603525B2 (ja) | 2019-11-06 |
Family
ID=58388967
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015184915A Active JP6603525B2 (ja) | 2015-09-18 | 2015-09-18 | ミシン |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6603525B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7137329B2 (ja) * | 2018-03-20 | 2022-09-14 | Juki株式会社 | ミシン |
| DE102018206088A1 (de) * | 2018-04-20 | 2019-10-24 | Dürkopp Adler AG | Nähmaschine |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH082396B2 (ja) * | 1991-11-29 | 1996-01-17 | ジューキ株式会社 | ミシンの押え上げ制御装置 |
| JP3734301B2 (ja) * | 1996-03-22 | 2006-01-11 | Juki株式会社 | 自動縫いミシンの中押え装置 |
| JP2006102396A (ja) * | 2004-10-08 | 2006-04-20 | Juki Corp | ミシン |
| DE102008016353A1 (de) * | 2008-03-29 | 2009-10-08 | Dürkopp Adler AG | Nähmaschine |
| DE102014213877A1 (de) * | 2014-07-16 | 2016-01-21 | Dürkopp Adler AG | Nähmaschine |
-
2015
- 2015-09-18 JP JP2015184915A patent/JP6603525B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017056079A (ja) | 2017-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108377645B (zh) | 穿孔装置以及具有该穿孔装置的刺绣缝纫机 | |
| US6209468B1 (en) | Method and apparatus for sewing handles on a strip of material | |
| JP2017192474A (ja) | ミシン | |
| JP2006102396A (ja) | ミシン | |
| JP6603525B2 (ja) | ミシン | |
| JP2019022623A (ja) | ミシン | |
| JP5427355B2 (ja) | ミシンの中押さえ装置 | |
| JP4375467B2 (ja) | ミシンの中押え装置 | |
| JP5993287B2 (ja) | ミシン | |
| JP6530246B2 (ja) | クランプ機構及びこれを備えるミシン | |
| JP5689590B2 (ja) | ミシン | |
| CN1831231B (zh) | 缝纫机 | |
| CN108411504B (zh) | 缝纫机 | |
| JP4919714B2 (ja) | 多頭式刺繍機 | |
| JP2020081298A (ja) | ミシン | |
| KR100944296B1 (ko) | 재봉틀 | |
| JP5073360B2 (ja) | ミシン | |
| JP7454916B2 (ja) | ミシン | |
| JP2019022622A (ja) | ミシン | |
| KR20070104839A (ko) | 재봉기 | |
| JPH09299642A (ja) | エッジコントロール縫製装置 | |
| CN1603502B (zh) | 缝制装置及缝制装置的被缝制物保持构件的控制方法 | |
| JP2006020757A (ja) | 刺繍縫製可能なミシン | |
| TW201829869A (zh) | 縫紉機 | |
| KR20030035947A (ko) | 재봉틀의 눌러올리는 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190521 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6603525 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |