JP6592376B2 - エレベーター及び救出運転方法 - Google Patents
エレベーター及び救出運転方法 Download PDFInfo
- Publication number
- JP6592376B2 JP6592376B2 JP2016035025A JP2016035025A JP6592376B2 JP 6592376 B2 JP6592376 B2 JP 6592376B2 JP 2016035025 A JP2016035025 A JP 2016035025A JP 2016035025 A JP2016035025 A JP 2016035025A JP 6592376 B2 JP6592376 B2 JP 6592376B2
- Authority
- JP
- Japan
- Prior art keywords
- car
- brake
- controller
- solenoid coil
- braking force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 22
- 230000008859 change Effects 0.000 claims description 29
- 238000001514 detection method Methods 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 17
- 230000004907 flux Effects 0.000 description 11
- 230000004044 response Effects 0.000 description 10
- 230000001133 acceleration Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 5
- 230000005856 abnormality Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000004043 responsiveness Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000035699 permeability Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
Landscapes
- Elevator Control (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
また、上記課題を解決するため、本発明は、乗りかごと、一端が乗りかごに接続されるロープと、ロープの他端に接続されるつり合い錘と、ロープが巻き掛けられたシーブと、給電される電流が増加することで制動力を弱めるソレノイドコイルを有し、シーブに制動力を加えることで乗りかごの移動を制動するブレーキ装置と、ソレノイドコイルへ電流を給電するブレーキ電源と、乗りかごの移動速度を検出する移動速度検出手段と、移動速度検出手段に応じてブレーキ電源が給電する電流を制御するコントローラと、を備え、コントローラは、乗りかごが停止している場合、所定の時間が経過する毎にソレノイドコイルに給電する電流を所定値分ずつ増加させる指令をブレーキ電源へ送信し、移動速度検出手段によって乗りかごの速度変化が検出された場合、ソレノイドコイルに給電する電流の増加を停止する指令をブレーキ電源へ送信することで、ブレーキ装置による制動力を発生させながら、乗りかごとつり合い錘との重量のアンバランスによって乗りかごを移動させ、コントローラは、乗りかごが移動している場合、かつ、移動速度検出手段によって乗りかごの速度が規定速度を超えたことが検出された場合、ソレノイドコイルに給電される電流を時間に対して連続的に減少させる指令をブレーキ電源へ送信し、乗りかごを停止させることを特徴とするエレベーターを提供する。
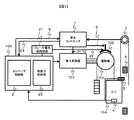
2 エレベーター制御部
4 秤センサ
5 位置センサ
7 かごの位置・速度・加速度を検出するための手段
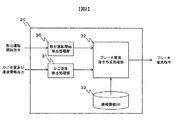
20 制動力制御部
Claims (9)
- 乗りかごと、一端が前記乗りかごに接続されるロープと、前記ロープの他端に接続されるつり合い錘と、前記ロープが巻き掛けられたシーブと、給電される電流が増加することで制動力を弱めるソレノイドコイルを有し、前記シーブに制動力を加えることで前記乗りかごの移動を制動するブレーキ装置と、前記ソレノイドコイルへ電流を給電するブレーキ電源と、前記乗りかごの移動速度を検出する移動速度検出手段と、前記移動速度検出手段に応じて前記ブレーキ電源が給電する電流を制御するコントローラと、を備え、
前記コントローラは、前記乗りかごが停止している場合、所定の時間が経過する毎に前記ソレノイドコイルに給電する電流を所定値分ずつ階段状に増加させる指令を前記ブレーキ電源へ送信し、前記移動速度検出手段によって前記乗りかごの速度変化が検出された場合、前記ソレノイドコイルに給電する電流の増加を停止する指令を前記ブレーキ電源へ送信することで、前記ブレーキ装置による制動力を発生させながら、前記乗りかごと前記つり合い錘との重量のアンバランスによって前記乗りかごを移動させることを特徴とするエレベーター。 - 乗りかごと、一端が前記乗りかごに接続されるロープと、前記ロープの他端に接続されるつり合い錘と、前記ロープが巻き掛けられたシーブと、給電される電流が増加することで制動力を弱めるソレノイドコイルを有し、前記シーブに制動力を加えることで前記乗りかごの移動を制動するブレーキ装置と、前記ソレノイドコイルへ電流を給電するブレーキ電源と、前記乗りかごの移動速度を検出する移動速度検出手段と、前記移動速度検出手段に応じて前記ブレーキ電源が給電する電流を制御するコントローラと、を備え、
前記コントローラは、前記乗りかごが停止している場合、所定の時間が経過する毎に前記ソレノイドコイルに給電する電流を所定値分ずつ増加させる指令を前記ブレーキ電源へ送信し、前記移動速度検出手段によって前記乗りかごの速度変化が検出された場合、前記ソレノイドコイルに給電する電流の増加を停止する指令を前記ブレーキ電源へ送信することで、前記ブレーキ装置による制動力を発生させながら、前記乗りかごと前記つり合い錘との重量のアンバランスによって前記乗りかごを移動させ、
前記コントローラは、
前記乗りかごが移動している場合、かつ、前記移動速度検出手段によって前記乗りかごの速度が規定速度を超えたことが検出された場合、前記ソレノイドコイルに給電される電流を時間に対して連続的に減少させる指令を前記ブレーキ電源へ送信し、前記乗りかごを停止させることを特徴とするエレベーター。 - 請求項2において、
前記コントローラは、
前記乗りかごが移動している場合、かつ、前記移動速度検出手段によって前記乗りかごの速度が規定速度を超えたことが検出された場合、前記ソレノイドコイルに給電される電流を時間に対して線形に減少させる指令を前記ブレーキ電源へ送信し、前記乗りかごを停止させることを特徴とするエレベーター。 - 請求項1から3のいずれか1項において、
前記所定の時間は、前記ソレノイドコイルに給電する電流を増加させる指令を前記コントローラが前記ブレーキ電源へ送信してから、前記ブレーキ装置の制動力の変化が止まるまでにかかる時間よりも長いことを特徴とするエレベーター。 - 請求項1から3のいずれか1項において、
前記コントローラは
機種ごとに必要な前記所定の時間の情報が格納させる機種情報データベースを備え、前記コントローラは前記機種情報データベースに記憶される情報に応じて前記所定の時間を決定することを特徴とするエレベーター。 - 請求項1または2において、
前記移動速度検出手段はガバナに供えつけられたエンコーダであることを特徴とするエレベーター。 - 請求項1から3のいずれか1項において、
前記コントローラは、
前記乗りかごに乗客が乗っている状況で前記乗りかごが非常停止している場合、かつ、救出運転信号が前記コントローラに入力された場合、前記移動速度検出手段の検出情報に基づいて前記ソレノイドコイルに給電する電流を変化させる指令を前記ブレーキ電源へ送信することで、前記乗りかごを下車可能階まで移動させることを特徴とする、エレベーター。 - 請求項7において、
前記乗りかごの状況と運転状態を受信し、前記救出運転信号を前記コントローラへ発信する外部端末から、前記コントローラは前記救出運転信号を受信することを特徴とするエレベーター。 - 乗りかごと、
一端が前記乗りかごに接続されるロープと、
前記ロープの他端に接続されるつり合い錘と、
前記ロープが巻き掛けられたシーブと、
給電される電流が増加することで制動力を弱めるソレノイドコイルを有し、前記シーブに制動力を加えることで前記乗りかごの移動を制動するブレーキ装置と、を備えるエレベーターにおける救出運転制御方法であって、
前記乗りかごが非常停止し、かつ、前記乗りかごに乗客が乗っている場合、所定の時間が経過する毎に前記ソレノイドコイルに給電する電流を所定値分ずつ階段状に増加させ、
前記乗りかごの速度変化が検出された場合、前記ソレノイドコイルに給電する電流の増加を停止することで、前記ブレーキ装置による制動力を発生させながら、前記乗りかごと前記つり合い錘との重量のアンバランスによって前記乗りかごを下車可能階まで移動させることを特徴とする救出運転方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016035025A JP6592376B2 (ja) | 2016-02-26 | 2016-02-26 | エレベーター及び救出運転方法 |
| EP17756166.9A EP3421405A4 (en) | 2016-02-26 | 2017-02-06 | ELEVATOR AND RESCUE OPERATION CONTROL PROCEDURE |
| CN201780010713.8A CN108698790B (zh) | 2016-02-26 | 2017-02-06 | 电梯以及救援运转控制方法 |
| PCT/JP2017/004192 WO2017145725A1 (ja) | 2016-02-26 | 2017-02-06 | エレベーター及び救出運転制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016035025A JP6592376B2 (ja) | 2016-02-26 | 2016-02-26 | エレベーター及び救出運転方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017149552A JP2017149552A (ja) | 2017-08-31 |
| JP6592376B2 true JP6592376B2 (ja) | 2019-10-16 |
Family
ID=59686218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016035025A Active JP6592376B2 (ja) | 2016-02-26 | 2016-02-26 | エレベーター及び救出運転方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3421405A4 (ja) |
| JP (1) | JP6592376B2 (ja) |
| CN (1) | CN108698790B (ja) |
| WO (1) | WO2017145725A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108394780A (zh) * | 2018-04-17 | 2018-08-14 | 快意电梯股份有限公司 | 无机房电梯救援控制系统 |
| EP3656718A1 (en) * | 2018-11-23 | 2020-05-27 | Otis Elevator Company | Elevator safety system with self-diagnostic functionality |
| CN111288100B (zh) * | 2018-12-10 | 2023-03-14 | 奥的斯电梯公司 | 制动装置、制动装置检测方法以及电梯系统 |
| US11415191B2 (en) * | 2019-10-04 | 2022-08-16 | Otis Elevator Company | System and method configured to identify conditions indicative of electromagnetic brake temperature |
| KR20230129549A (ko) | 2021-03-29 | 2023-09-08 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터 장치 |
| CN113401759B (zh) * | 2021-06-29 | 2023-06-23 | 日立楼宇技术(广州)有限公司 | 一种电梯轿厢的制动方法及装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56117970U (ja) * | 1980-02-05 | 1981-09-09 | ||
| JPS56117970A (en) * | 1980-02-18 | 1981-09-16 | Hitachi Ltd | Emergency driving device for elevator |
| JPH07242376A (ja) * | 1994-03-07 | 1995-09-19 | Toshiba Corp | エレベータ制御装置の停電時着床装置 |
| US7434664B2 (en) * | 2005-03-08 | 2008-10-14 | Kone Corporation | Elevator brake system method and control |
| JP4607631B2 (ja) * | 2005-03-16 | 2011-01-05 | 株式会社日立製作所 | エレベーター用ブレーキ制御装置 |
| CN201002902Y (zh) * | 2006-06-30 | 2008-01-09 | 东芝电梯株式会社 | 用于电梯超速保护装置的控制装置 |
| JP2008230757A (ja) * | 2007-03-20 | 2008-10-02 | Toshiba Elevator Co Ltd | 機械室レスエレベータシステム |
| JP4975103B2 (ja) * | 2007-07-25 | 2012-07-11 | 三菱電機株式会社 | エレベータ装置 |
| JP5369616B2 (ja) * | 2008-10-31 | 2013-12-18 | 株式会社日立製作所 | エレベーター |
| JPWO2010125689A1 (ja) * | 2009-05-01 | 2012-10-25 | 三菱電機株式会社 | エレベータ装置 |
| JP2013119436A (ja) * | 2011-12-06 | 2013-06-17 | Hitachi Ltd | エレベータ装置およびその制御方法 |
-
2016
- 2016-02-26 JP JP2016035025A patent/JP6592376B2/ja active Active
-
2017
- 2017-02-06 CN CN201780010713.8A patent/CN108698790B/zh active Active
- 2017-02-06 WO PCT/JP2017/004192 patent/WO2017145725A1/ja active Application Filing
- 2017-02-06 EP EP17756166.9A patent/EP3421405A4/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN108698790B (zh) | 2019-12-24 |
| JP2017149552A (ja) | 2017-08-31 |
| EP3421405A1 (en) | 2019-01-02 |
| CN108698790A (zh) | 2018-10-23 |
| WO2017145725A1 (ja) | 2017-08-31 |
| EP3421405A4 (en) | 2019-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6592376B2 (ja) | エレベーター及び救出運転方法 | |
| JP5214239B2 (ja) | エレベータ装置 | |
| JP5247690B2 (ja) | エレベータの安全装置 | |
| JP5037139B2 (ja) | エレベータ装置 | |
| JP4970257B2 (ja) | エレベータ装置 | |
| WO2009084076A1 (ja) | エレベータ装置 | |
| JPWO2008117423A1 (ja) | エレベータのブレーキ装置 | |
| JP6393633B2 (ja) | エレベーター | |
| JP6581551B2 (ja) | エレベーターシステム | |
| JP5079288B2 (ja) | エレベータ装置 | |
| CN107697772B (zh) | 电梯 | |
| JP4537043B2 (ja) | エレベーターのブレーキ制御装置 | |
| JP6655489B2 (ja) | エレベーター | |
| KR101246994B1 (ko) | 엘리베이터 장치 | |
| JP6449806B2 (ja) | エレベータ装置及びその動作制御方法 | |
| JP5365090B2 (ja) | エレベーター装置 | |
| JP2006008333A (ja) | エレベータ装置 | |
| JP2015168487A (ja) | エレベーター装置及びその制御装置 | |
| WO2009153882A1 (ja) | エレベータ装置 | |
| JPH08333058A (ja) | エレベータ装置 | |
| KR100902452B1 (ko) | 엘리베이터 장치 | |
| JP5310551B2 (ja) | エレベータ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170111 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190726 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6592376 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |