JP6567775B2 - 車両用変速機 - Google Patents
車両用変速機 Download PDFInfo
- Publication number
- JP6567775B2 JP6567775B2 JP2018529476A JP2018529476A JP6567775B2 JP 6567775 B2 JP6567775 B2 JP 6567775B2 JP 2018529476 A JP2018529476 A JP 2018529476A JP 2018529476 A JP2018529476 A JP 2018529476A JP 6567775 B2 JP6567775 B2 JP 6567775B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- driven
- drive
- shaft
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/093—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears with two or more countershafts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Structure Of Transmissions (AREA)
- Hybrid Electric Vehicles (AREA)
Description
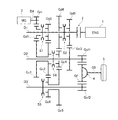
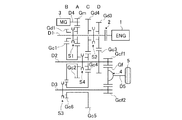
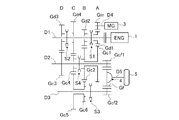
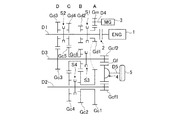
図1は、実施例1のハイブリッド車両用変速機の概略断面図である。ハイブリッド車両用変速機は、エンジン1と変速機の間に配置されたクラッチ2と、エンジン1と同軸に配置された駆動軸D1と、駆動軸D1と平行に配置された第1従動軸D2と、第1従動軸D2と平行に配置された第2従動軸D3と、モータ3と同時に配置されたモータ軸D4と、駆動輪5に接続された出力軸D5と、を有する平行軸型常時噛み合い変速機である。
1速は、クラッチ2を締結し、第1シフト機構S1により駆動軸D1と第1駆動ギヤGd1との間を締結し、第4シフト機構S4により第1従動軸D2と第2従動ギヤGc2との間を締結する。第2従動ギヤGc2は第1二列間一体ギヤG21であり、第1従動軸D2と第2従動ギヤGc2との間の締結により、第1従動軸D2と第1従動ギヤGc1との間も締結される。これにより、エンジン1から出力されたトルクは、駆動軸D1→第1駆動ギヤGd1→第1従動ギヤGc1→第2従動ギヤGc2→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に伝達される。
2速は、クラッチ2を締結し、第1シフト機構S1により駆動軸D1と第2駆動ギヤGd2との間を締結し、第4シフト機構S4により第1従動軸D2と第2従動ギヤGc2との間を締結する。第2従動ギヤGc2は第1二列間一体ギヤG21であり、第1従動軸D2と第2従動ギヤGc2との間の締結により、第1従動軸D2と第1従動ギヤGc1との間も締結される。これにより、エンジン1から出力されたトルクは、駆動軸D1→第2駆動ギヤGd2→第2従動ギヤGc2→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に伝達される。
3速は、クラッチ2を締結し、第2シフト機構S2により駆動軸D1と第4駆動ギヤGd4との間を締結し、第4シフト機構S4により第1従動軸D2と第2従動ギヤGc2との間を締結する。これにより、エンジン1から出力されたトルクは、駆動軸D1→第4駆動ギヤGd4→第4従動ギヤGc4→第5従動ギヤGc5→第6従動ギヤGc6→第2従動ギヤGc2→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に出力される。
4速は、クラッチ2を締結し、第2シフト機構S2により駆動軸D1と第3駆動ギヤGd3との間を締結する。これにより、エンジン1から出力されたトルクは、駆動軸D1→第3駆動ギヤGd3→第3従動ギヤGc3→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に伝達される。
5速は、クラッチ2を締結し、第1シフト機構S1により駆動軸D1と第2駆動ギヤGd2との間を締結し、第4シフト機構S4により第1従動軸D2と第4従動ギヤGc4との間を締結する。これにより、エンジン1から出力されたトルクは、駆動軸D1→第2駆動ギヤGd2→第2従動ギヤGc2→第2二列間一体ギヤG22→第4従動ギヤGc4→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に伝達される。
6速は、第2シフト機構S2により第4駆動ギヤGd4と駆動軸D1との間を締結し、第4シフト機構S4により第4従動ギヤGc4と第1従動軸D2との間を締結し、クラッチ2を締結する。これにより、エンジン1から出力されたトルクは、駆動軸D1→第4駆動ギヤGd4→第4従動ギヤGc4→第1従動軸D2→第1出力ギヤGcf1→ファイナルギヤGfを介して駆動輪5に出力される。
後退速は、第1シフト機構S1により第1駆動ギヤGd1と駆動軸D1との間を締結し、第3シフト機構S3により第2二列間一体ギヤG22と第2従動軸D3との間を締結する。これにより、エンジン1から出力されたトルクは、駆動軸D1→第1駆動ギヤGd1→第1二列間一体ギヤG21→第2従動軸D3→第2出力ギヤGcf2→ファイナルギヤGfを介して駆動輪5に出力される。ハイブリッド後退速への遷移時は、後退速の状態においてモータ3からのトルクの出力を開始し、モータギヤGmから第1駆動ギヤGd1にトルクを付与することで、エンジントルクと同じトルクフローにより駆動輪5にモータトルクを出力できる。
すなわち、実施例1のハイブリッド車両用変速機は、モータトルクのみを用いた前進3速後退1速の変速機として機能できる。
(1)エンジン1からのトルクが入力される駆動軸D1に設けられた複数の駆動ギヤと、第1及び第2従動軸D2,D3(従動軸)に設けられ駆動ギヤと噛合する複数の従動ギヤと、駆動軸D1と駆動ギヤとの間及び/又は第1及び第2従動軸D2,D3と従動ギヤとの間の動力伝達の断接を切り換える複数のシフト機構S1〜S4と、を備えた車両用変速機であって、従動ギヤの同一軸上にあるギヤのうち、異なる列に配置された2つのギヤが一体に連結された第1二列間一体ギヤG21と、第1二列間一体ギヤG21と異なる軸に配置された第2二列間一体ギヤG22とを有し、第1二列間一体ギヤG21の一方のギヤと、第2二列間一体ギヤG22の一方のギヤとが常時噛合する。
よって、一方の二列間一体ギヤのうち二列間一体ギヤ同士で噛み合っていないギヤに入力されたトルクを、他方の二列間一体ギヤのうち二列間一体ギヤ同士で噛み合っていないギヤから出力することで、一対のギヤの噛合いから得られる変速比と異なる変速比を得ることができ、軸方向寸法やコストアップを招くことなく多段化できる。
よって、軸方向寸法やコストアップを招くことなく多段化を図ることができる。
よって、異なるギヤ比のモータ走行モードを得ることができ、走行状態に応じたモードを選択することで燃費を向上できる。
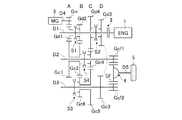
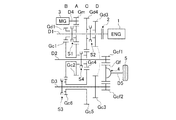
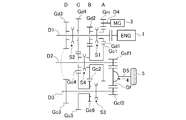
次に実施例2について説明する。基本的な構成は実施例1と同じであるため、異なる点についてのみ説明する。図12は実施例2のハイブリッド車両用変速機の構成を表す概略断面図である。実施例1では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例2では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。尚、図12中の点線は、第3駆動ギヤGd3と第3従動ギヤGc3とが噛み合うことを示すものであり、以下の図面においても同様に使用する。このように、第3従動ギヤGc3の軸位置を変更しても、実施例1と同様の作用効果が得られる。
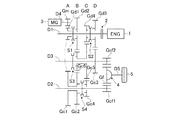
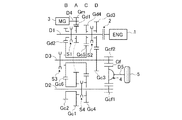
次に実施例3について説明する。基本的な構成は実施例1と同じであるため、異なる点についてのみ説明する。図13は実施例3のハイブリッド車両用変速機の構成を表す概略断面図である。ここで、説明のため、実施例2を表す図12のA,B,C,Dをそれぞれギヤ列と定義する。図12中、A列は、モータギヤGm,第1駆動ギヤGd1,第1従動ギヤGc1が並ぶ列である。B列は、第2駆動ギヤGd2,第6従動ギヤGc6,第2従動ギヤGc2が並ぶ列である。C列は、第4駆動ギヤGd4,第5従動ギヤGc5,第4従動ギヤGc4が並ぶ列である。D列は、第3駆動ギヤGd3,第3従動ギヤGc3が並ぶ列である。実施例2では、エンジン側から順にエンジン側から順にD列→C列→B列→A列と並んでいた。これに対し、実施例3では、エンジン側から順にD列→C列→A列→B列と並ぶ点が異なる。この場合も実施例2と同様の作用効果が得られる。
次に実施例4について説明する。基本的な構成は実施例3と同じであるため、異なる点についてのみ説明する。図14は実施例4のハイブリッド車両用変速機の構成を表す概略断面図である。実施例3では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例4では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例3と同様の作用効果が得られる。
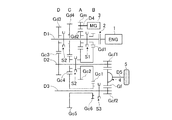
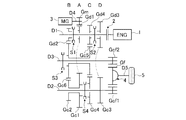
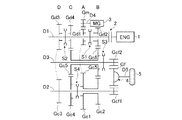
次に実施例5について説明する。基本的な構成は実施例3と同じであるため、異なる点についてのみ説明する。図15は実施例5のハイブリッド車両用変速機の構成を表す概略断面図である。実施例3では、エンジン側から順にD列→C列→B列→A列と並んでいた。これに対し、実施例5では、エンジン側から順にB列→A列→C列→D列と並ぶ点が異なる。この場合も実施例3と同様の作用効果が得られる。
次に実施例6について説明する。基本的な構成は実施例5と同じであるため、異なる点についてのみ説明する。図16は実施例6のハイブリッド車両用変速機の構成を表す概略断面図である。実施例5では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例6では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例5と同様の作用効果が得られる。
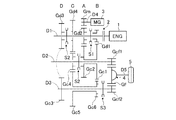
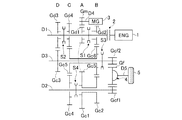
次に実施例7について説明する。基本的な構成は実施例5と同じであるため、異なる点についてのみ説明する。図17は実施例7のハイブリッド車両用変速機の構成を表す概略断面図である。実施例5では、エンジン側から順にB列→A列→C列→D列と並んでいた。これに対し、実施例5では、エンジン側から順にA列→B列→C列→D列と並ぶ点が異なる。この場合も実施例5と同様の作用効果が得られる。
次に実施例8について説明する。基本的な構成は実施例7と同じであるため、異なる点についてのみ説明する。図18は実施例8のハイブリッド車両用変速機の構成を表す概略断面図である。実施例7では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例8では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例7と同様の作用効果が得られる。
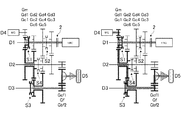
次に実施例9について説明する。基本的な構成は実施例1と同じであるため、異なる点についてのみ説明する。図19は実施例9のハイブリッド車両用変速機の構成を表す概略断面図である。実施例1では、上から順に駆動軸D1→第1従動軸D2→第2従動軸D3と配置した。これに対し、実施例9では、駆動軸D1→第2従動軸D3→第1従動軸D2と配置した点が異なる。すなわち、第1従動軸D2と第2従動軸D3との軸位置関係を入れ替えた点が異なる。これに伴い、ギヤ比の調整を行うため、各ギヤ比を調整した。尚、第3従動ギヤGc3は、第2従動軸D3に移動している。この場合も、実施例1と同様の作用効果が得られる。
次に実施例10について説明する。基本的な構成は実施例9と同じであるため、異なる点についてのみ説明する。図20は実施例10のハイブリッド車両用変速機の構成を表す概略断面図である。実施例9では、第3従動ギヤGc3を第2従動軸D3に配置した。これに対し、実施例10では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第1従動軸D2に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例9と同様の作用効果が得られる。
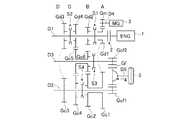
次に、実施例11について説明する。基本的な構成は実施例10と同じであるため、異なる点についてのみ説明する。図21は実施例11のハイブリッド車両用変速機の構成を表す概略断面図である。実施例10では、エンジン側から順にD列→C列→B列→A列と並んでいた。これに対し、実施例11では、エンジン側から順にD列→C列→A列→B列と並ぶ点が異なる。この場合も実施例10と同様の作用効果が得られる。
次に実施例12について説明する。基本的な構成は実施例11と同じであるため、異なる点についてのみ説明する。図22は実施例12のハイブリッド車両用変速機の構成を表す概略断面図である。実施例11では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例12では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例11と同様の作用効果が得られる。
次に、実施例13について説明する。基本的な構成は実施例10と同じであるため、異なる点についてのみ説明する。図23は実施例13のハイブリッド車両用変速機の構成を表す概略断面図である。実施例10では、エンジン側から順にD列→C列→B列→A列と並んでいた。これに対し、実施例13では、エンジン側から順にB列→A列→C列→D列と並ぶ点が異なる。この場合も実施例10と同様の作用効果が得られる。
次に実施例14について説明する。基本的な構成は実施例13と同じであるため、異なる点についてのみ説明する。図24は実施例14のハイブリッド車両用変速機の構成を表す概略断面図である。実施例13では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例14では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例13と同様の作用効果が得られる。
次に、実施例15について説明する。基本的な構成は実施例10と同じであるため、異なる点についてのみ説明する。図25は実施例15のハイブリッド車両用変速機の構成を表す概略断面図である。実施例10では、エンジン側から順にD列→C列→B列→A列と並んでいた。これに対し、実施例15では、エンジン側から順にA列→B列→C列→D列と並ぶ点が異なる。この場合も実施例10と同様の作用効果が得られる。
次に実施例16について説明する。基本的な構成は実施例15と同じであるため、異なる点についてのみ説明する。図26は実施例16のハイブリッド車両用変速機の構成を表す概略断面図である。実施例15では、第3従動ギヤGc3を第1従動軸D2に配置した。これに対し、実施例16では、ギヤ列に変更を加えることなく、第3従動ギヤGc3を第2従動軸D3に配置し、第3駆動ギヤGd3と噛合い可能に構成されている点が異なる。このように、第3従動ギヤGc3の軸位置を変更しても、実施例15と同様の作用効果が得られる。
また、実施例1では、モータを備えたハイブリッド車両用変速機の構成を示したが、二列間一体ギヤを備えた構成であれば、エンジンのみを備えた車両用変速機として構成してもよい。
Claims (2)
- エンジンからのトルクが入力される駆動軸に設けられた複数の駆動ギヤと、
従動軸に設けられ前記駆動ギヤと噛合する複数の従動ギヤと、
前記駆動軸と前記駆動ギヤとの間及び/又は前記従動軸と前記従動ギヤとの間の動力伝達の断接を切り換える複数のシフト機構と、
を備えた車両用変速機であって、
前記駆動ギヤ及び/又は前記従動ギヤの同一軸上にあるギヤのうち、異なる列に配置された2つのギヤが一体に連結された第1二列間一体ギヤと、該第1二列間一体ギヤと異なる軸に配置された第2二列間一体ギヤとを有し、
前記第1二列間一体ギヤの一方のギヤと、前記第2二列間一体ギヤの一方のギヤとが常時噛合し、
前記従動軸は、前記第1二列間一体ギヤと第1出力ギヤを有する第1従動軸と、該第1従動軸と異なる軸心を有し第2出力ギヤと前記第2二列間一体ギヤを有する第2従動軸と、を有し、
前記駆動ギヤ及び前記従動ギヤと異なる軸心に配置され、前記第1出力ギヤと常時噛合するとともに、前記第2出力ギヤと常時噛合する第3出力ギヤを有する出力軸を備えた、車両用変速機。 - 請求項1に記載の車両用変速機において、
前記駆動軸及び前記従動軸と異なる軸心に配置され、前記複数のギヤのいずれか一つと常時噛合するモータを有し、
前記モータから出力されたトルクが前記第1及び第2二列間一体ギヤのいずれか一方のみを介してトルク伝達する第1モータ走行モードと、前記第1及び第2二列間一体ギヤの両方を介してトルク伝達する第2モータ走行モードと、を有する、車両用変速機。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016145064 | 2016-07-25 | ||
| JP2016145064 | 2016-07-25 | ||
| PCT/JP2017/024893 WO2018020982A1 (ja) | 2016-07-25 | 2017-07-07 | 車両用変速機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2018020982A1 JPWO2018020982A1 (ja) | 2019-04-04 |
| JP6567775B2 true JP6567775B2 (ja) | 2019-08-28 |
Family
ID=61016024
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018529476A Expired - Fee Related JP6567775B2 (ja) | 2016-07-25 | 2017-07-07 | 車両用変速機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6567775B2 (ja) |
| WO (1) | WO2018020982A1 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3660528B2 (ja) * | 1999-06-07 | 2005-06-15 | 本田技研工業株式会社 | 平行軸式変速機 |
| JP4088566B2 (ja) * | 2003-08-07 | 2008-05-21 | 本田技研工業株式会社 | 平行軸式変速機 |
| JP4206312B2 (ja) * | 2003-08-07 | 2009-01-07 | 本田技研工業株式会社 | 平行軸式変速機 |
| JP2015209156A (ja) * | 2014-04-28 | 2015-11-24 | 三菱自動車工業株式会社 | 変速装置 |
-
2017
- 2017-07-07 JP JP2018529476A patent/JP6567775B2/ja not_active Expired - Fee Related
- 2017-07-07 WO PCT/JP2017/024893 patent/WO2018020982A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2018020982A1 (ja) | 2019-04-04 |
| WO2018020982A1 (ja) | 2018-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8887588B2 (en) | Transmission | |
| CN101970901B (zh) | 车辆用双离合器式变速器 | |
| JP2006052832A (ja) | ダブルクラッチ変速機 | |
| JP5022810B2 (ja) | 6組の前進変速ギヤ対を有する変速機 | |
| JP5659553B2 (ja) | ハイブリッド駆動装置 | |
| JP4855092B2 (ja) | ダブルクラッチ型トランスミッション | |
| CN107120390B (zh) | 用于机动车辆的双离合变速器 | |
| JP2010203605A (ja) | トランスミッション | |
| KR101408453B1 (ko) | 자동차용 다중 유압식 다판 클러치 변속기 | |
| JP2008069832A (ja) | 自動車用駆動装置 | |
| JP5091514B2 (ja) | 産業車両用変速機 | |
| JP2013072464A (ja) | 自動変速機装置 | |
| JP2005054957A (ja) | 平行軸式変速機 | |
| JP3660528B2 (ja) | 平行軸式変速機 | |
| WO2018163949A1 (ja) | ハイブリッド車両用トランスミッション | |
| JP5276272B2 (ja) | 産業車両用変速機 | |
| JP6078401B2 (ja) | 車両の駆動装置 | |
| JP2009063139A (ja) | 多段変速遊星歯車列 | |
| JP5329477B2 (ja) | 変速機 | |
| JP2013160282A (ja) | ツインクラッチ式変速機 | |
| JP6567775B2 (ja) | 車両用変速機 | |
| WO2017110803A1 (ja) | 車両用手動変速機 | |
| WO2015079838A1 (ja) | 車両用手動変速機 | |
| JP2014228027A (ja) | 変速機 | |
| JP2014020384A (ja) | 自動変速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190731 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6567775 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |