JP6562941B2 - 船舶用ドッキング制御 - Google Patents
船舶用ドッキング制御 Download PDFInfo
- Publication number
- JP6562941B2 JP6562941B2 JP2016558238A JP2016558238A JP6562941B2 JP 6562941 B2 JP6562941 B2 JP 6562941B2 JP 2016558238 A JP2016558238 A JP 2016558238A JP 2016558238 A JP2016558238 A JP 2016558238A JP 6562941 B2 JP6562941 B2 JP 6562941B2
- Authority
- JP
- Japan
- Prior art keywords
- chassis
- fender
- control system
- ship
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003032 molecular docking Methods 0.000 title description 6
- 239000000725 suspension Substances 0.000 claims description 48
- 238000006243 chemical reaction Methods 0.000 claims description 31
- 238000006073 displacement reaction Methods 0.000 claims description 14
- 238000000034 method Methods 0.000 claims description 12
- 238000004873 anchoring Methods 0.000 claims description 10
- 230000004044 response Effects 0.000 claims description 4
- 230000007423 decrease Effects 0.000 claims description 3
- 230000033001 locomotion Effects 0.000 description 9
- 239000011295 pitch Substances 0.000 description 7
- 238000012546 transfer Methods 0.000 description 6
- 230000036961 partial effect Effects 0.000 description 5
- 238000004088 simulation Methods 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001141 propulsive effect Effects 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000011338 soft pitch Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/04—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using gyroscopes directly
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B1/00—Hydrodynamic or hydrostatic features of hulls or of hydrofoils
- B63B1/02—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement
- B63B1/10—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls
- B63B1/14—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls the hulls being interconnected resiliently or having means for actively varying hull shape or configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/30—Arrangement of ship-based loading or unloading equipment for transfer at sea between ships or between ships and off-shore structures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/02—Fenders integral with waterborne vessels or specially adapted therefor, e.g. fenders forming part of the hull or incorporated in the hull; Rubbing-strakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B1/00—Hydrodynamic or hydrostatic features of hulls or of hydrofoils
- B63B1/02—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement
- B63B1/10—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls
- B63B1/14—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls the hulls being interconnected resiliently or having means for actively varying hull shape or configuration
- B63B2001/145—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls the hulls being interconnected resiliently or having means for actively varying hull shape or configuration having means for actively varying hull shape or configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B17/00—Vessels parts, details, or accessories, not otherwise provided for
- B63B2017/0072—Seaway compensators
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Vehicle Body Suspensions (AREA)
- Vibration Prevention Devices (AREA)
Description
出願人の米国特許出願公開第2013/0233225号明細書及び米国特許出願公開第2013/0233226号明細書は、多胴船用の相互接続サスペンションシステムの様々な配置を示し、米国特許出願公開第2013/0213288号明細書は、代替的なタイプの制御アクチュエータを記述している。出願人の国際公開第2013/181699号は、主に双胴船に適するサスペンション形状を開示しており、国際公開第2014/153600号は、ジャイロスコープスタビライザを利用するシャシー部の安定化を開示している。
あるいは、前記船舶が二つの前方船殻及び二つの後方船殻を有する四胴船である場合は、前記シャシー部の縦揺れ姿勢は、前記二つの前方船殻と前記シャシー部との間の力又は負荷を増加し、かつ、前記二つの後方船殻と前記シャシー部との間の力又は負荷を減少することによって(逆もまた同様)、前記少なくとも二つの船殻に対して調節され得る。
Claims (21)
- 多胴船の少なくともサスペンションシステムを制御する制御システムであって、
前記船舶は、シャシー部と、前記シャシー部に対して移動可能な少なくとも二つの船殻とを含み、
前記サスペンションシステムは、前記少なくとも二つの船殻の上方で前記シャシー部の少なくとも一部の支持を行い、
前記サスペンションシステムは、調節可能支持体と、前記調節可能支持体の支持力及び/又は変位の調節を可能とする少なくとも一つのモータと、を含み、
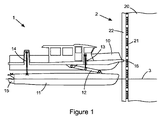
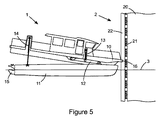
前記制御システムは、固定されたオブジェクト又は浮遊するオブジェクトと前記船舶の前記シャシー部との間のフェンダ部への摩擦力を示す少なくとも一つの信号を受信するフェンダ摩擦力入力を含み、かつ
前記フェンダ摩擦力入力に応じて、前記制御システムは、前記フェンダ部への前記摩擦力を減少させる、又は小さくするために、前記シャシー部と前記少なくとも二つの船殻との間の前記支持力及び/又は変位を調節するように配置される制御システム。 - さらに、前記固定されたオブジェクト又は前記浮遊するオブジェクトと前記船舶の前記シャシー部との間の前記フェンダ部への摩擦力を示す前記少なくとも一つの信号を提供する少なくとも一つのフェンダ摩擦力センサを含む請求項1に記載の制御システム。
- 前記フェンダ部は、前記船舶の前記シャシー部に設けられる請求項2に記載の制御システム。
- さらに、前記船舶の前記シャシー部と前記固定されたオブジェクト又は前記浮遊するオブジェクトとの間の反力を示す信号を受信する少なくとも一つのフェンダ反力入力を含む請求項1に記載の制御システム。
- 前記制御システムは、前記少なくとも一つのフェンダ摩擦力入力と前記少なくとも一つのフェンダ反力入力とによって受信される前記信号に依存して推進力を増加する又は減少させる請求項4に記載の制御システム。
- 前記調節可能支持体は、前記フェンダ部への前記摩擦力を減少させる、又は小さくするために調節される請求項1に記載の制御システム。
- 前記調節可能支持体は、左前部調節可能支持体、右前部調節可能支持体、左後部調節可能支持体及び右後部調節可能支持体である四つの調節可能支持体を含む請求項1に記載の制御システム。
- 前記少なくとも二つの船殻は、左方船殻及び右方船殻であり、
前記左前部調節可能支持体及び前記左後部調節可能支持体は、前記左方船殻上で長手方向に離間され、
前記右前部調節可能支持体及び前記右後部調節可能支持体は、前記右方船殻上で長手方向に離間される請求項7に記載の制御システム。 - 前記少なくとも二つの船殻は、左前方船殻、右前方船殻、左後方船殻及び右後方船殻であり、
前記左前部調節可能支持体又は前記右前部調節可能支持体はそれぞれ、前記シャシー部の前方部分と前記それぞれの船殻との間に配置され、
前記左後部調節可能支持体又は前記右後部調節可能支持体はそれぞれ、前記シャシー部の後方部分と前記それぞれの船殻との間に位置される請求項7に記載の制御システム。 - 前記船舶の前方端部又は後方端部が、前記固定されたオブジェクト又は前記浮遊するオブジェクトに隣接するときに、
前記制御システムは、前記シャシー部が縦揺れすることを許しながら、前記フェンダ部における垂直力を減少させる、又は実質的に除去するために、前記左前部支持体及び前記右前部支持体、並びに/又は、前記左後部支持体及び前記右後部支持体を調節する請求項7に記載の制御システム。 - 前記船舶の左舷又は右舷が、前記固定されたオブジェクト又は前記浮遊するオブジェクトに隣接するときに、
前記制御システムは、前記シャシー部が横揺れすることを許しながら、前記フェンダ部における垂直力を減少させる、又は実質的に除去するために、前記左前部支持体及び前記左後部支持体、並びに/又は、前記右前部支持体及び前記右後部支持体を調節する請求項7に記載の制御システム。 - 前記フェンダ部は、前記固定されたオブジェクト又は前記浮遊するオブジェクトに設けられる請求項1に記載の制御システム。
- 船舶のシャシー部を制御する方法であって、
前記船舶は、シャシー部と、少なくとも二つの船殻と、前記少なくとも二つの船殻の上方で前記シャシー部の少なくとも一部の支持を行うサスペンションシステムと、サスペンション制御システムと、を含み、
前記サスペンション制御システムは、繋留モードを含む、少なくとも二つの動作のモードを含み、
前記繋留モードに入る、又は前記繋留モードから出るときを決定するステップを含み、
前記繋留モードにおいて、
前記船舶の前記シャシー部と固定されたオブジェクト又は浮遊するオブジェクトとの間のフェンダ部への摩擦力を示す少なくとも一つの信号を受信するステップと、
前記少なくとも一つの信号に応じて、前記フェンダ部への前記摩擦力を減少させる、又は実質的に除去するために、前記サスペンションシステムを調節するステップと、を含む方法。 - 前記繋留モードに入る、又は前記繋留モードから出るときを決定する前記ステップは、
モードセレクタの繋留モード位置を検出することを含む請求項13に記載の方法。 - さらに、前記フェンダ部での前記船舶の前記シャシー部と前記固定されたオブジェクト又は前記浮遊するオブジェクトとの間の反力を感知するステップを含む請求項13又は14に記載の方法。
- 前記繋留モードに入る、又は前記繋留モードから出るときを決定する前記ステップは、前記フェンダ部での前記反力を前記繋留モードに入るための値及び前記繋留モードを出るための値と比較することを含む請求項15に記載の方法。
- 前記フェンダ部における垂直力を減少させる、又は実質的に除去するために、前記サスペンションシステムを調節する前記ステップは、
前記シャシー部と前記船舶の前記少なくとも二つの船殻との間の前記縦揺れ姿勢を調節すること含む請求項13に記載の方法。 - 前記フェンダ部における前記垂直力を減少させる、又は実質的に除去するために、前記サスペンションシステムを調節する前記ステップは、
前記船舶の前記少なくとも二つの船殻に対して前記シャシー部の上下揺れ姿勢を調節することを含む請求項13に記載の方法。 - 前記フェンダ部における前記垂直力を減少させる、又は実質的に除去するために、前記サスペンションシステムを調節する前記ステップは、
前記シャシー部と前記船舶の前記少なくとも二つの船殻との間の横揺れ姿勢を調節すること含む請求項13に記載の方法。 - 前記フェンダ部は、前記船舶の前記シャシー部に設けられる請求項13に記載の方法。
- 前記フェンダ部は、前記固定されたオブジェクト又は前記浮遊するオブジェクトに設けられる請求項13に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2013904833 | 2013-12-11 | ||
| AU2013904833A AU2013904833A0 (en) | 2013-12-11 | Modelling and control of a multi-body marine vessel including suspension | |
| PCT/AU2014/001118 WO2015085352A1 (en) | 2013-12-11 | 2014-12-11 | Docking control for vessels |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016539861A JP2016539861A (ja) | 2016-12-22 |
| JP2016539861A5 JP2016539861A5 (ja) | 2018-01-25 |
| JP6562941B2 true JP6562941B2 (ja) | 2019-08-21 |
Family
ID=53370361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016558238A Active JP6562941B2 (ja) | 2013-12-11 | 2014-12-11 | 船舶用ドッキング制御 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9849947B2 (ja) |
| EP (1) | EP3079980B1 (ja) |
| JP (1) | JP6562941B2 (ja) |
| KR (1) | KR102229026B1 (ja) |
| AU (1) | AU2014361732B2 (ja) |
| WO (1) | WO2015085352A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101879723B1 (ko) * | 2016-11-24 | 2018-07-18 | 창원대학교 산학협력단 | 조파저항감쇠가 용이한 다선체 선박 |
| US10232925B1 (en) | 2016-12-13 | 2019-03-19 | Brunswick Corporation | System and methods for steering a marine vessel |
| CN108189965B (zh) * | 2017-12-25 | 2019-05-03 | 中国船舶工业集团公司第七0八研究所 | 一种用于横摇力矩直接测量的试验系统及安装方法 |
| CN108177723A (zh) * | 2018-02-08 | 2018-06-19 | 武汉理工大学 | 三体船侧体智能调节装置及调节方法 |
| CN108454788A (zh) * | 2018-04-04 | 2018-08-28 | 上海航盛船舶设计有限公司 | 一种用于海上风电风机运维船的靠泊引桥装置 |
| EP3590817A1 (en) * | 2018-07-04 | 2020-01-08 | Ørsted Wind Power A/S | A method for the use in offshore crew transfer |
| EP3699078B1 (en) * | 2019-02-20 | 2023-01-18 | Van Halteren Technologies Boxtel B.V. | Motion compensating gangway and method for controlling the same |
| KR102192744B1 (ko) * | 2019-03-05 | 2020-12-17 | 한국해양과학기술원 | 천해 해저지형 탐사용 수상선 시스템 |
| CN110239674B (zh) * | 2019-06-25 | 2020-08-04 | 南京蒽天捷能源科技有限公司 | 可移动串联式浮动液货过驳海工平台及过驳方法 |
| AU2021258905A1 (en) * | 2020-04-24 | 2022-11-24 | Nauti-Craft Ltd | Vessel attitude control arrangement |
| US11628920B2 (en) | 2021-03-29 | 2023-04-18 | Brunswick Corporation | Systems and methods for steering a marine vessel |
| CN113221295B (zh) * | 2021-06-21 | 2024-02-13 | 中船黄埔文冲船舶有限公司 | 一种护舷材的设计制造方法及护舷材 |
| DE102022109821A1 (de) | 2022-04-22 | 2023-10-26 | Offcon GmbH | Aktiver fender, aktives fender-system sowie verfahren zur regelung einer relativen bewegung |
| WO2023202746A1 (de) * | 2022-04-22 | 2023-10-26 | Offcon GmbH | Aktiver fender, aktives fender-system sowie verfahren zur regelung einer relativen bewegung |
| CN117533473B (zh) * | 2024-01-09 | 2024-04-12 | 上海新纪元机器人有限公司 | 具有并联机器人装置的船舶及自平衡方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4137861A (en) * | 1974-06-26 | 1979-02-06 | Irving Brummenaes | Process for mooring a ship and a fender arrangement for such mooring process |
| WO2001051345A1 (en) * | 2000-01-07 | 2001-07-19 | Fmc Corporation | Mooring systems with active force reacting systems and passive damping |
| NZ520450A (en) * | 2002-07-30 | 2004-12-24 | Mooring Systems Ltd | Method of controlling a mooring system |
| JP4401293B2 (ja) * | 2002-08-14 | 2010-01-20 | ヘイリング テクノロジーズ ピーティーワイ リミテッド | 船舶 |
| US6763774B1 (en) * | 2003-02-10 | 2004-07-20 | Boston Whaler, Inc. | Active deck suspension system |
| US7137350B2 (en) * | 2004-05-21 | 2006-11-21 | Waldock William L | Catamaran with extending platform carried by the underwing and an extending deployable ramp carried by the extending platform |
| US8484787B2 (en) * | 2009-03-25 | 2013-07-16 | Board Of Supervisors Of Louisiana State University And Agricultural And Mechanics College | Fenders for pier protection against vessel collision |
| GB2483401B (en) * | 2009-11-05 | 2012-09-26 | David Armstrong | Pivoting deck vessel |
| AU2011256123B2 (en) * | 2010-05-16 | 2015-03-05 | Nauti-Craft Ltd | Multi-hulled water craft including suspension |
| CA2799558C (en) | 2010-05-16 | 2018-03-13 | Nauti-Craft Pty Ltd | Control of multi-hulled water craft |
| US9027496B2 (en) * | 2011-09-16 | 2015-05-12 | Doug Zucco | Watercraft mooring standoff |
| WO2013126583A1 (en) * | 2012-02-22 | 2013-08-29 | Velodyne Acoustics, Inc. | Boat with active suspension system |
| GB201209028D0 (en) * | 2012-05-22 | 2012-07-04 | Warren Mark N | Autobrow vessel gangway system |
| EP2855251B1 (en) | 2012-06-05 | 2019-01-16 | Nauti-Craft Pty Ltd | Improvements to multi-hull vessel suspension geometry |
| AU2014245840B2 (en) | 2013-03-25 | 2018-01-18 | Nauti-Craft Ltd | Stabilising of marine bodies |
-
2014
- 2014-12-11 US US15/104,287 patent/US9849947B2/en active Active
- 2014-12-11 AU AU2014361732A patent/AU2014361732B2/en active Active
- 2014-12-11 WO PCT/AU2014/001118 patent/WO2015085352A1/en active Application Filing
- 2014-12-11 EP EP14870346.5A patent/EP3079980B1/en active Active
- 2014-12-11 JP JP2016558238A patent/JP6562941B2/ja active Active
- 2014-12-11 KR KR1020167018498A patent/KR102229026B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016539861A (ja) | 2016-12-22 |
| KR102229026B1 (ko) | 2021-03-18 |
| AU2014361732B2 (en) | 2018-02-01 |
| KR20160096176A (ko) | 2016-08-12 |
| US9849947B2 (en) | 2017-12-26 |
| EP3079980B1 (en) | 2019-02-06 |
| AU2014361732A1 (en) | 2016-06-02 |
| WO2015085352A1 (en) | 2015-06-18 |
| EP3079980A1 (en) | 2016-10-19 |
| US20160355241A1 (en) | 2016-12-08 |
| EP3079980A4 (en) | 2017-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6562941B2 (ja) | 船舶用ドッキング制御 | |
| EP2817213B1 (en) | Boat with active suspension system | |
| EP3707068B1 (en) | Motorized hydrofoil device | |
| US10099754B2 (en) | Motorized hydrofoil device | |
| US10286980B2 (en) | Control of multi-hulled vessels | |
| US9068855B1 (en) | Counter-porpoising watercraft attitude control system | |
| JP4401293B2 (ja) | 船舶 | |
| US7743720B1 (en) | Multihull hydrofoil watercraft | |
| EP2978661B1 (en) | Stabilising of marine bodies | |
| US10759496B2 (en) | Vessel for operating on a body of water, comprising an aft foil for generating a thrust force and adjustment means for adjusting an angle of incidence of the aft foil | |
| KR20140041308A (ko) | 현가장치를 포함하는 다중선체 선박 | |
| JP2016539861A5 (ja) | ||
| EP2847069A1 (en) | Vessel gangway system | |
| KR102461779B1 (ko) | 선박의 전면의 설계 | |
| JPH0848288A (ja) | 船舶の姿勢制御装置 | |
| JP2846015B2 (ja) | 半潜水式・双胴型浮体付き船舶 | |
| KR20160002223A (ko) | 호버크래프트 방식의 구명정 | |
| KR20180058509A (ko) | 조파저항감쇠가 용이한 다선체 선박 | |
| US20220297799A1 (en) | Aquatic moving body | |
| JPH0628396Y2 (ja) | 上部構造物動揺制御式双胴船 | |
| CN109070979A (zh) | 抗颠簸多体船 | |
| JPH04208689A (ja) | フローティングキャビン艇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6562941 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |