JP6547510B2 - 車両用表示装置及び車両用表示方法 - Google Patents
車両用表示装置及び車両用表示方法 Download PDFInfo
- Publication number
- JP6547510B2 JP6547510B2 JP2015157921A JP2015157921A JP6547510B2 JP 6547510 B2 JP6547510 B2 JP 6547510B2 JP 2015157921 A JP2015157921 A JP 2015157921A JP 2015157921 A JP2015157921 A JP 2015157921A JP 6547510 B2 JP6547510 B2 JP 6547510B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- display
- unit
- view image
- steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Closed-Circuit Television Systems (AREA)
Description
そのため、運転者によっては、車外の目視をほとんど行わずに、表示部に表示される俯瞰映像を注視しながら、駐車動作を行う場合がある。
しかし、俯瞰映像には、撮像部の位置よりも上にある障害物等は表示されない場合や、合成処理等により距離感が歪む場合があり、俯瞰映像の目視に加えて運転者が車外の目視を併用することが好ましい。
車両の周辺の映像を撮影する撮像部と、
前記撮像部が撮影した映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成する俯瞰映像生成部と、
前記車両内の運転席の前方に配置される横長形状の表示部と、
前記車両のステアリング舵角の情報を取得する情報取得部と、
前記情報取得部が取得した前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断する向き判断部と、
前記向き判断部が判断した前記車両のステアリング向きに応じて、前記表示部における左右方向に前記俯瞰映像を表示するよう制御する表示制御部と、を備えるものである。
車両内の運転席の前方に配置される横長形状の表示部を備える車両用表示装置による車両用表示方法であって、
前記車両の周辺の映像を撮影し、
前記車両の周辺の映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成し、
前記車両のステアリング舵角の情報を取得し、
前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断し、
前記車両のステアリング向きに応じて、前記表示部における左右方向に前記俯瞰映像を表示するものである。
(1)実施の形態1
図1は、本実施の形態1にかかる車両用表示装置が搭載される車両内の運転席の前方の例を模式的に示す図である。図1に示される車両においては、ウインドシールド50の下側のダッシュボード60における運転席の前方正面に配置されたクラスターパネルを横長形状の表示部11とし、この表示部11に俯瞰映像を表示する。また、図1に示される車両内の運転席の前方には、表示部11、ウインドシールド50、及びダッシュボード60の他、ナビゲーション画面30が配置されたセンターコンソール20、ステアリングホイール40、及びリヤビューミラー70等が配置されている。
表示部11は、クラスターパネルであり、上述した俯瞰映像の他、速度計やエンジン回転計等も表示する。ステアリングホイール40は、運転者がステアリング操作を行うものである。ステアリングホイール40によるステアリング操作に応じて、車両のステアリング向きが変更される。リヤビューミラー70は、運転者が車両の後方を確認するためのミラーである。
ここで、俯瞰映像生成部122は、俯瞰映像Xにおける車両の車長方向を縦に配置した縦長形状の俯瞰映像Xを生成するものとする。図3においては、俯瞰映像生成部122は、車両の前方を上向きにした縦長形状の俯瞰映像Xを生成している。
情報取得部125は、CAN(Controller Area Network)やセンサ等から各種の情報を取得する。本実施の形態1においては、情報取得部125は、CAN又は舵角センサから、車両のステアリング舵角の情報を取得するものとする。ここで、情報取得部125が取得する車両のステアリング舵角の情報とは、車両のステアリング舵角の舵角0度を基準とした±の角度又はその角度に応じた電圧値等を示す情報であるとする。
まず、表示制御部123は、俯瞰映像生成部122が生成した俯瞰映像Xの表示開始条件が満たされているか否かを判断する(ステップA1)。俯瞰映像Xの表示開始条件とは、例えば、リバースギアが選択されたこと、車庫入れ表示モードが選択されたこと、現在位置が予め登録された車庫又は駐車場に位置していること等、様々な条件を適用することが可能である。
一方、ステップA1において、俯瞰映像Xの表示開始条件が満たされている場合は(ステップA1のYes)、表示制御部123は、俯瞰映像生成部122が生成した俯瞰映像Xの表示部11への表示を開始するよう制御する(ステップA2)。このとき、俯瞰映像Xの表示位置はデフォルトの表示位置とする。俯瞰映像Xのデフォルトの表示位置は、特に限定されないが、例えば、次のようにすることができる。図1の例においては、表示部11は、クラスターパネルとしており、一般的にはクラスターパネルには、速度計やエンジン回転計等が表示されることが多い。そのため、本実施の形態1においては、俯瞰映像Xのデフォルトの表示位置は、ステアリングホイール40が右側に装着される車両であれば表示部11の左端部とし、ステアリングホイール40が左側に装着される車両であれば表示部11の右端部とする。
一方、ステップA3において、俯瞰映像Xの表示終了条件が満たされていない場合は(ステップA3のNo)、向き判断部124は、車両のステアリング向きが変更されたか否かを判断する(ステップA4)。なお、向き判断部124は、ステップA2から移行して最初にステップA4の判断をする場合においては、車両のステアリング向きが変更されたと判断するものとする。
一方、ステップA4において、車両のステアリング向きが変更されている場合は(ステップA4のYes)、向き判断部124は、車両のステアリング向きの判断結果を変更し、表示制御部123は、変更後の車両のステアリング向きを判断する(ステップA5)。
ここで、表示部11に俯瞰映像Xを表示している状況においては、運転者が車外を目視している時の目視方向は、車両のステアリング向きと一致することが多いと考えられる。本実施の形態1においては、車両のステアリング向きに応じて、表示部11における左右方向に俯瞰映像Xを表示し、具体的には、表示部11における、車両のステアリング向きと同方向に、俯瞰映像Xを表示する。そのため、表示部11においては、運転者が車外を目視している目視方向と同方向に、俯瞰映像Xが表示されることになる。これにより、運転者による俯瞰映像の目視と車外の目視との併用が容易になる。
本実施の形態2にかかる車両用表示装置10は、実施の形態1と比較して、構成自体は同様であるが、動作が異なる。
そのため、以下では、本実施の形態2にかかる車両用表示装置10の構成については説明を省略し、動作についてのみ説明を行う。図7は、本実施の形態2にかかる車両用表示装置10の俯瞰映像Xの表示動作例を示すフローチャートである。図7に示されるフローチャートは、図4に示される実施の形態1のフローチャートと比較して、ステップB1,B2が追加された点が異なっている。
ステップA5において、変更後の車両のステアリング向きが左向きである場合、向き判断部124は、車両のステアリング向きが左向きに維持されている時間を計測し、表示制御部123は、車両のステアリング向きが所定時間以上、左向きに維持されているか否かを判断する(ステップB1)。このとき、向き判断部124は、車両のステアリング舵角の変動を問わず、車両のステアリング向きが左向きであれば、左向きに維持されていると判断する。所定時間は、例えば、5秒程度とすることが考えられる。
そのため、車両のステアリング向きが変更されても、所定時間が経過する前に車両のステアリング向きが元に戻った場合には、表示部11における俯瞰映像Xの表示位置は、元の車両のステアリング向きの位置のままになる。これにより、表示部11における俯瞰映像Xの表示位置が左右方向に頻繁に切り替わってしまうことを防止することができる。
図8は、本実施の形態3にかかる車両用表示装置10の構成例を示すブロック図である。図8に示される車両用表示装置10は、図2に示される実施の形態1の構成と比較して、走行判断部126が追加された点が異なっている。また、本実施の形態3においては、情報取得部125は、CAN又は舵角センサから、車両のステアリング舵角の情報を取得することに加えて、CAN又は車速センサから、車両の走行速度の情報を取得するものとする。
走行判断部126は、車両のステアリング向きが変更された場合、情報取得部125が取得した車両の走行速度の情報を用いて、変更後の車両のステアリング向きが維持されたまま車両が走行した走行距離を計測する。
ステップA5において、変更後の車両のステアリング向きが左向きである場合、走行判断部126は、車両のステアリング向きが左向きに維持されたまま車両が走行した走行距離を計測し、表示制御部123は、車両のステアリング向きが左向きに維持されたまま車両が所定距離以上走行しているか否かを判断する(ステップC1)。このとき、走行判断部126は、情報取得部125が取得した車両の走行速度に、車両のステアリング向きが左向きに変更されてから経過した時間を積算することで、走行距離を計測する。
そのため、車両のステアリング向きが変更されても、車両が所定距離を走行する前に車両のステアリング向きが元に戻った場合には、表示部11における俯瞰映像Xの表示位置は、元の車両のステアリング向きの位置のままになる。これにより、表示部11における俯瞰映像Xの表示位置が左右方向に頻繁に切り替わってしまうことを防止することができる。
11 表示部
12 制御部
121 撮影制御部
122 俯瞰映像生成部
123 表示制御部
124 向き判断部
125 情報取得部
126 走行判断部
13 撮像部
131 前方カメラ
132 後方カメラ
133 左側方カメラ
134 右側方カメラ
20 センターコンソール
30 ナビゲーション画面
40 ステアリングホイール
50 ウインドシールド
60 ダッシュボード
70 リヤビューミラー
Claims (7)
- 車両の周辺の映像を撮影する撮像部と、
前記撮像部が撮影した映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成する俯瞰映像生成部と、
前記車両内の運転席の前方に配置される横長形状の表示部と、
前記車両のステアリング舵角の情報を取得する情報取得部と、
前記情報取得部が取得した前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断するとともに、前記車両のステアリング向きが維持されている時間を計測する向き判断部と、
前記向き判断部が、前記車両のステアリング向きが所定時間以上維持されたと判断された場合に、判断した前記車両のステアリング向きに応じて、前記表示部における前記車両のステアリング向きと同方向に、前記俯瞰映像を表示するよう制御する表示制御部と、
を備える、車両用表示装置。 - 前記車両のステアリング向きが維持されたまま前記車両が走行した走行距離を計測する走行判断部をさらに備え、
前記表示制御部は、前記車両のステアリング向きが維持されたまま前記車両が所定距離以上走行した場合に、前記表示部における、前記車両のステアリング向きと同方向に、前記俯瞰映像を表示するよう制御する、
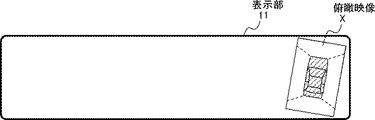
請求項1に記載の車両用表示装置。 - 前記表示制御部は、前記表示部における左右方向に前記俯瞰映像を表示するよう制御する場合に、前記俯瞰映像の下方が上方よりも前記表示部の左右方向の中央に寄るように、前記俯瞰映像を傾斜して表示するよう制御する、
請求項1または2に記載の車両用表示装置。 - 前記俯瞰映像生成部は、前記表示制御部が前記表示部における左右方向に前記俯瞰映像を表示するよう制御する場合に、前記俯瞰映像における車両が前記表示部の上方寄りかつ左右方向の中央寄りに表示されるようにした俯瞰映像を生成する、
請求項1から3のいずれか1項に記載の車両用表示装置。 - 車両の周辺の映像を撮影する撮像部と、
前記撮像部が撮影した映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成する俯瞰映像生成部と、
前記車両内の運転席の前方に配置される横長形状の表示部と、
前記車両のステアリング舵角の情報を取得する情報取得部と、
前記情報取得部が取得した前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断する向き判断部と、
前記向き判断部が判断した前記車両のステアリング向きに応じて、前記表示部における左右方向に前記俯瞰映像を表示するとともに、前記俯瞰映像の下方が上方よりも前記表示部の左右方向の中央に寄るように、前記俯瞰映像を傾斜して表示するよう制御する表示制御部と、
を備える、車両用表示装置。 - 車両の周辺の映像を撮影する撮像部と、
前記撮像部が撮影した映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成する俯瞰映像生成部と、
前記車両内の運転席の前方に配置される横長形状の表示部と、
前記車両のステアリング舵角の情報を取得する情報取得部と、
前記情報取得部が取得した前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断する向き判断部と、
前記向き判断部が判断した前記車両のステアリング向きに応じて、前記表示部における左右方向に前記俯瞰映像を表示するよう制御する表示制御部と、
を備え、
前記俯瞰映像生成部は、前記表示制御部が前記表示部における左右方向に前記俯瞰映像を表示するよう制御する場合に、前記俯瞰映像における車両が前記表示部の上方寄りかつ左右方向の中央寄りに表示されるようにした俯瞰映像を生成する、車両用表示装置。 - 車両内の運転席の前方に配置される横長形状の表示部を備える車両用表示装置による車両用表示方法であって、
前記車両の周辺の映像を撮影し、
前記車両の周辺の映像を、前記車両の上方から見たように視点変換した俯瞰映像を生成し、
前記車両のステアリング舵角の情報を取得し、
前記車両のステアリング舵角の情報を基に、前記車両のステアリング向きが右向き又は左向きのどちらであるかを判断するとともに、前記車両のステアリング向きが維持されている時間を計測し、
前記車両のステアリング向きが所定時間以上維持されたと判断された場合に、前記車両のステアリング向きに応じて、前記表示部における前記車両のステアリング向きと同方向に前記俯瞰映像を表示する、
車両用表示方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015157921A JP6547510B2 (ja) | 2015-08-10 | 2015-08-10 | 車両用表示装置及び車両用表示方法 |
| CN201680026519.4A CN107534757B (zh) | 2015-08-10 | 2016-05-19 | 车辆用显示装置以及车辆用显示方法 |
| PCT/JP2016/002455 WO2017026083A1 (ja) | 2015-08-10 | 2016-05-19 | 車両用表示装置及び車両用表示方法 |
| EP16834787.0A EP3337166B1 (en) | 2015-08-10 | 2016-05-19 | Vehicular display apparatus and vehicular display method |
| US15/867,573 US10596966B2 (en) | 2015-08-10 | 2018-01-10 | Display device for vehicle and display method for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015157921A JP6547510B2 (ja) | 2015-08-10 | 2015-08-10 | 車両用表示装置及び車両用表示方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017038202A JP2017038202A (ja) | 2017-02-16 |
| JP2017038202A5 JP2017038202A5 (ja) | 2017-11-16 |
| JP6547510B2 true JP6547510B2 (ja) | 2019-07-24 |
Family
ID=58049616
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015157921A Active JP6547510B2 (ja) | 2015-08-10 | 2015-08-10 | 車両用表示装置及び車両用表示方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6547510B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007223338A (ja) * | 2004-07-12 | 2007-09-06 | Sharp Corp | 表示システム、移動体、表示方法、表示プログラムおよびその記録媒体 |
| JP4661917B2 (ja) * | 2008-07-25 | 2011-03-30 | 日産自動車株式会社 | 駐車支援装置および駐車支援方法 |
| JP5071738B2 (ja) * | 2008-12-18 | 2012-11-14 | アイシン精機株式会社 | 表示装置 |
| JP5798392B2 (ja) * | 2011-06-27 | 2015-10-21 | クラリオン株式会社 | 駐車支援装置 |
| JP5814187B2 (ja) * | 2012-06-07 | 2015-11-17 | 日立建機株式会社 | 自走式産業機械の表示装置 |
-
2015
- 2015-08-10 JP JP2015157921A patent/JP6547510B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017038202A (ja) | 2017-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11528413B2 (en) | Image processing apparatus and image processing method to generate and display an image based on a vehicle movement | |
| US20120169875A1 (en) | Rearward view assistance apparatus | |
| EP2990265A1 (en) | Vehicle control apparatus | |
| JP6730614B2 (ja) | 車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラム | |
| JP6548900B2 (ja) | 画像生成装置、画像生成方法及びプログラム | |
| JP2007142735A (ja) | 周辺監視システム | |
| JP2011151666A (ja) | パラメータ取得装置、パラメータ取得システム、パラメータ取得方法、及び、プログラム | |
| JP2016084089A (ja) | 周辺監視装置 | |
| JP2010018201A (ja) | 運転者支援装置、運転者支援方法および運転者支援処理プログラム | |
| JP5548069B2 (ja) | 画像処理装置、及び、画像処理方法 | |
| US10596966B2 (en) | Display device for vehicle and display method for vehicle | |
| JP2018107573A (ja) | 車両用視認装置 | |
| JP2010208359A (ja) | 車両用表示装置 | |
| JP6065766B2 (ja) | 情報提供装置および情報提供方法 | |
| JP2008213647A (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6547510B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP2011118485A (ja) | 方向転換支援装置及び方法 | |
| WO2017026083A1 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP5245471B2 (ja) | 撮像装置、並びに、画像処理装置および方法 | |
| JP7293990B2 (ja) | 車両用表示制御装置、車両用表示制御方法、およびプログラム | |
| JP6488628B2 (ja) | 映像処理装置、及び車載映像処理システム | |
| JP2018176874A (ja) | 運転支援装置、運転支援方法 | |
| JP6405930B2 (ja) | 車載用表示装置 | |
| JP5943207B2 (ja) | 車両の駐車操作支援用映像表示装置 | |
| JP6747349B2 (ja) | 運転支援装置、運転支援方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171006 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180330 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6547510 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |