JP6542556B2 - 電動ステアリングロック装置 - Google Patents
電動ステアリングロック装置 Download PDFInfo
- Publication number
- JP6542556B2 JP6542556B2 JP2015062943A JP2015062943A JP6542556B2 JP 6542556 B2 JP6542556 B2 JP 6542556B2 JP 2015062943 A JP2015062943 A JP 2015062943A JP 2015062943 A JP2015062943 A JP 2015062943A JP 6542556 B2 JP6542556 B2 JP 6542556B2
- Authority
- JP
- Japan
- Prior art keywords
- lock
- lock bolt
- output value
- linear hall
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Lock And Its Accessories (AREA)
Description
例えば、特許文献1には、ロック部材に磁石を取り付け、ロック位置とアンロック位置に対応する箇所に磁気センサをそれぞれ配置し、これらの磁気センサによって磁石の磁力を検知することによってロック部材がロック位置にあるかアンロック位置にあるかを検出する技術が開示されている。
また、磁石の固体毎に、磁束密度が異なることから、この磁束密度のばらつきによって、ロック部材の位置検出を正確に行えないおそれがあった。このように、従来の電動ステアリングロック装置は、磁石の固体毎のばらつきの影響を受けやすかった。
また、本発明の他の課題は、磁石の固体毎のばらつきの影響を受けにくく、ロック部材の位置を精度よく検出できる電動ステアリングロック装置を提供することである。
また、本発明によれば、電動ステアリングロック装置は、磁石の固体毎のばらつきの影響を受けにくく、ロック部材の位置を精度よく検出できる。
図1は、本発明による電動ステアリングロック装置1の第1実施形態を示す分解斜視図である。
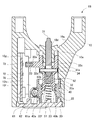
図2は、第1実施形態の電動ステアリングロック装置1のロック状態を示す縦断面図である。
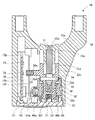
図3は、第1実施形態の電動ステアリングロック装置1のアンロック状態を示す縦断面図である。
なお、図1を含め、以下に示す各図は、模式的に示した図であり、各部の大きさ、形状は、理解を容易にするために、適宜誇張して示している。
また、以下の説明では、具体的な数値、形状、材料等を示して説明を行うが、これらは、適宜変更することができる。
さらに、以下の説明中において、特に説明しない限り、上下等の向きを示す記載は、図1から図3中における向きを指すものとする。
第1のリニアホールIC72は、電動モータ61を駆動制御する制御手段であるCPU91に電気的に接続されている。CPU91は、通信インターフェイス(通信I/F)92及び車両の通信ライン93を経て車両に搭載された不図示の車両側制御部に電気的に接続されている。なお、図1に示すように、基板70には、通信インターフェイス92の機能を果たすコネクタ80が取り付けられている。このコネクタ80には、CPU91から延びる不図示の電気的接続線が接続される。また、本実施形態のCPU91は、第1のリニアホールIC72の出力値に応じてロックボルト31の位置を判定する判定手段としての機能を備えている(詳細は後述する)。
本実施形態の第1のリニアホールIC72は、検出した磁界の強さに応じて変化するアナログ電圧を出力する。第1のリニアホールIC72に到達する磁界の強さは、磁石33と第1のリニアホールIC72との距離に反比例する。したがって、第1のリニアホールIC72が出力する電圧は、磁石33が第1のリニアホールIC72に近いほど大きく、磁石33が第1のリニアホールIC72から離れるほど小さくなる。本実施形態では、このリニアホールICの出力特性を利用して、磁石33の位置、すなわち、ロックボルト31の位置を検出している。
電動モータ61の駆動によりロックユニット30(ロックボルト31)が移動すると、ロックユニット30に固定された磁石33と、第1のリニアホールIC72との距離が変化し、第1のリニアホールIC72によって検出される磁束の量が変化する。これにより、図5に示すように第1のリニアホールIC72の出力値が変化する。
図5に示す例では、第1のリニアホールIC72の出力値が第1出力値範囲V1(Va≧V1≧Vb)にある場合には、ロックユニット30(ロックボルト31)がアンロック位置にあるものと、CPU91が判定する。
一方、第1のリニアホールIC72の出力値が第2出力値範囲V2(Vc≧V2≧Vd)にある場合には、ロックユニット30(ロックボルト31)がロック位置にあるものと、CPU91が判定する。
本実施形態のように、第1のリニアホールIC72をロックボルト31がアンロック位置にあるときに磁石33の近傍に位置するように配置することにより、アンロック位置検出時において外部からの磁界の影響が少なくなり、確実にロックボルト31のアンロック位置を検出することができる。したがって、本実施形態の電動ステアリングロック装置1は、簡単な構成でロックボルト31の位置検出を行うことができ、かつ、安全性が損なわれることを防止できる。
不図示のエンジンが停止している状態では、図2に示すように、ロックユニット30のロックボルト31は、ロック位置にあって、その上端部がケース10のロックボルト挿通孔10dから凹部10aに突出して不図示のステアリングシャフトに係合している。この状態では、ステアリングシャフトの回動がロックされており、このロック状態においては不図示のステアリングホイールを回転操作することができず、これによって車両の盗難が防がれる。このとき、アーム32dに収容された磁石33は、基板70に設けられた第1のリニアホールIC72から離れて位置しており、第1のリニアホールIC72からの出力値が第2出力値範囲V2(図5参照)にあることによってCPU91は、ロックボルト31がロック位置にあることを判断して認識している。
図6は、第2実施形態の電動ステアリングロック装置1Bのロック状態を示す縦断面図である。
図7は、第2実施形態の電動ステアリングロック装置1Bのアンロック状態を示す縦断面図である。
図8は、第2実施形態の電動ステアリングロック装置1Bの制御システム構成図である。
第2実施形態の電動ステアリングロック装置1Bは、第2のリニアホールIC73をさらに設けた点と、CPU91によるロックボルト31の位置判定の方法が異なる他は、第1実施形態の電動ステアリングロック装置1と同様な構成をしている。よって、前述した第1実施形態と同様の機能を果たす部分には、同一の符号を付して、重複する説明を適宜省略する。
電動モータ61の駆動によりロックユニット30(ロックボルト31)が移動すると、ロックユニット30に固定された磁石33と、第2のリニアホールIC73との距離が変化し、第2のリニアホールIC73によって検出される磁束の量が変化する。これにより、図9に示すように第2のリニアホールIC73の出力値が変化する。また、第2のリニアホールIC73は、ロック位置の近傍に配置されているため、第1のリニアホールIC72の出力値を示す図5の場合とは、傾きが逆になっている。
一方、第2のリニアホールIC73の出力値が第4出力値範囲V4(Ve≧V4≧Vf)にある場合には、ロックユニット30(ロックボルト31)がロック位置にあるものと判定できる。
すなわち、第2実施形態のCPU91は、第1のリニアホールIC72の出力値を用いた判定結果と、第2のリニアホールIC73の出力値を用いた判定結果との両方がロック位置であるとの判定結果の場合にのみ、ロックユニット30(ロックボルト31)がロック位置にあるものと判定する。
これと同様に、第2実施形態のCPU91は、第1のリニアホールIC72の出力値を用いた判定結果と、第2のリニアホールIC73の出力値を用いた判定結果との両方がアンロック位置であるとの判定結果の場合にのみ、ロックユニット30(ロックボルト31)がアンロック位置にあるものと判定する。
なお、第1のリニアホールIC72の出力値による判定結果と、第2のリニアホールIC73の出力値による判定結果とが一致しない場合には、CPU91は、ロックユニット30(ロックボルト31)の位置確定は行わずに、故障とみなして、その旨の通知等を行う。
図10は、第3実施形態の電動ステアリングロック装置1Cのアンロック状態を示す縦断面図である。
第3実施形態の電動ステアリングロック装置1Cは、第1のリニアホールIC72が配置される位置が第1実施形態の場合と異なる他は、第1実施形態の電動ステアリングロック装置1と同様な構成をしている。よって、前述した第1実施形態と同様の機能を果たす部分には、同一の符号を付して、重複する説明を適宜省略する。
また、図10には、ロックボルト31がロック位置にある状態の磁石33の中心からロックボルト31の作動方向(図10中の上下方向)に対して垂直な第1の仮想線X1を示している。
さらに、図10には、ロックボルト31がアンロック位置にある状態の磁石33の中心からロックボルト31の作動方向に対して垂直な第2の仮想線X2を示している。
第3実施形態における第1のリニアホールIC(第1磁気センサ)72は、磁石33を検出する検出面の中心位置が、第1の仮想線X1と第2の仮想線X2との間よりも外側に位置するように、仮想線X2よりもアンロック方向側(図10中下側)に位置して配置されている。言い替えると、ロックボルト31と共に移動する磁石33は、磁石33の中心からロックボルト31の作動方向に対して垂直な仮想線が第1のリニアホールIC72の検出面の中心位置と重ならない範囲(磁石作動範囲L)で移動するように配置されている。すなわち、磁石33は、第1のリニアホールIC72の検出面に対して正対しない(正面から対向しない)位置において移動するようになっている。
第1のリニアホールIC72によるロックボルト31の検出方法については、第1実施形態と同様であるので、ここでの詳しい説明は省略する。
図11は、磁石33と第1のリニアホールIC72との位置関係が第1のリニアホールIC72の出力値にどのような影響を及ぼすかを示す図である。この図11のグラフ部分は、第1実施形態の図5と同様に記載している。
一般的に、リニアホールICは、磁石からの磁界の変化(磁束密度の変化)を検出して、検出した磁束密度に応じて出力電力値が変化する。しかし、リニアホールICに到達する磁束密度は、リニアホールICと磁石との位置が近くなると、磁力線の向きとリニアホールICが検出する磁力線の向きとの関係が変化して、出力特性が変化する。したがって、リニアホールICからの出力電力値は、磁石の移動距離と比例しない場合がある。
また、図11中のグラフの頂点を越えてしまうと、第1のリニアホールIC72からの出力電力値の増減が逆転してしまうことから、ロックボルト31の位置を誤検出してしまうおそれもある。
したがって、範囲B内において、ロックボルト31のアンロック位置を設定した場合でも、第1のリニアホールIC72をアンロック位置にある磁石33と対向する位置から少し外側にずらして配置することにより、磁石33が第1のリニアホールIC72と正対する位置と比べて、磁石毎の磁束密度のばらつきの影響を受けにくく、ロックボルト31の位置を精度よく検出できる。
以上説明した実施形態に限定されることなく、種々の変形や変更が可能であって、それらも本発明の範囲内である。
10 ケース
10a 凹部
10b コネクタ配設部
10c ピン孔
10d ロックボルト挿通孔
10e 係合溝
10f ロック部材収納部
10g 基板収納部
10h 連通部
11 ピン
20 リッド
21 ピン留め部
21a ピン挿通孔
22 ギヤ保持筒部
23 スプリング受け
30 ロックユニット
31 ロックボルト
31a 長孔
32 ドライバ
32a 雄ネジ部
32b ピン挿通孔
32c 回り止め部
32d アーム
32e 磁石収納部
32f 隔壁
33 磁石
34 ピン
40 ギヤ部材
40a ウォームホイール
40b 雌ネジ部
51 スプリング
52 スプリング
61 電動モータ
61a 出力軸
62 ウォームギヤ
70 基板
71 モータ給電端子
72 第1のリニアホールIC
73 第2のリニアホールIC
80 コネクタ
91 CPU
92 通信インターフェイス
93 通信ライン
94 バッテリ
95 ロックリレー
96 アンロックリレー
Claims (3)
- 第1磁気センサと、
ステアリングシャフトに係脱するロックボルト、または、該ロックボルトと連動して作動する部材の前記第1磁気センサと対向する部位に設けられ、かつ、前記ロックボルトの作動に応じて常には前記第1磁気センサと対向しない範囲で前記ロックボルトと共に移動するように設けられた磁石と、前記第1磁気センサの出力値に応じて前記ロックボルトの位置を判定する判定手段と、を備え、該判定手段は、前記出力値がその範囲内にある場合に前記ロックボルトがアンロック位置にあると判定する第1出力値範囲と、前記出力値がその範囲内にある場合に前記ロックボルトがロック位置にあると判定する第2出力値範囲とを備えた電動ステアリングロック装置において、
前記磁石は、前記ロックボルトの作動に応じて前記ロックボルトと共に移動するように設けられ、且つ、前記ロックボルトがロック位置にある状態の前記磁石の中心から前記ロックボルトの作動方向に対して垂直な第1の仮想線と、前記ロックボルトがアンロック位置にある状態の前記磁石の中心から前記作動方向に対して垂直な第2の仮想線が前記第1磁気センサの検出面の中心位置と重ならない範囲で移動するように配置され、
前記第1磁気センサは、磁気を検出する検出面の中心位置が、前記第1の仮想線と前記第2の仮想線との間よりも外側に位置するように配置されたことを特徴とする電動ステアリングロック装置。 - 請求項1に記載の電動ステアリングロック装置において、
前記第1磁気センサを、前記第1出力値範囲の値が前記第2出力値範囲の値よりも大きくなる位置に配置したこと、
を特徴とする電動ステアリングロック装置。 - 請求項2に記載の電動ステアリングロック装置において、
前記第1磁気センサよりも前記ロックボルト、または、該ロックボルトと連動して作動する部材の作動方向に沿ってロック位置側に第2磁気センサを設け、
前記判定手段には、前記第2磁気センサの出力値がその範間内にある場合に前記ロックボルトがアンロック位置にあると判定する第3出力値範囲と、前記第2磁気センサの出力値がその範囲内にある場合に前記ロックボルトがロック位置にあると判定する第4出力値範囲とを備えたこと、
を特徴とする電動ステアリングロック装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015062943A JP6542556B2 (ja) | 2014-04-28 | 2015-03-25 | 電動ステアリングロック装置 |
| CN201510204642.8A CN105015485B (zh) | 2014-04-28 | 2015-04-27 | 电动转向锁定装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014092302 | 2014-04-28 | ||
| JP2014092302 | 2014-04-28 | ||
| JP2015062943A JP6542556B2 (ja) | 2014-04-28 | 2015-03-25 | 電動ステアリングロック装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015221661A JP2015221661A (ja) | 2015-12-10 |
| JP6542556B2 true JP6542556B2 (ja) | 2019-07-10 |
Family
ID=54784945
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015062943A Active JP6542556B2 (ja) | 2014-04-28 | 2015-03-25 | 電動ステアリングロック装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6542556B2 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010129010A (ja) * | 2008-11-30 | 2010-06-10 | Hochiki Corp | 窓開閉検出装置 |
| JP5967813B2 (ja) * | 2012-06-27 | 2016-08-10 | 株式会社ユーシン | 電動ステアリングロック装置 |
| JP2014104876A (ja) * | 2012-11-28 | 2014-06-09 | Tokai Rika Co Ltd | 位置検出装置 |
-
2015
- 2015-03-25 JP JP2015062943A patent/JP6542556B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015221661A (ja) | 2015-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5624822B2 (ja) | 電動ステアリングロック装置 | |
| AU2007209811B2 (en) | Magnet-holding structure for magnetic position detector and steering lock apparatus | |
| US8826770B2 (en) | Electric steering lock device | |
| JP6325207B2 (ja) | 電動ステアリングロック装置 | |
| US8833119B2 (en) | Electric steering lock device | |
| JP5231375B2 (ja) | 電動ステアリングロック装置 | |
| JP6251023B2 (ja) | 電動ステアリングロック装置 | |
| JP5586342B2 (ja) | 電動ステアリングロック装置 | |
| JP6542556B2 (ja) | 電動ステアリングロック装置 | |
| JP5645745B2 (ja) | 電動ステアリングロック装置 | |
| JP6482242B2 (ja) | 電動ステアリングロック装置 | |
| JP5967813B2 (ja) | 電動ステアリングロック装置 | |
| JP6075828B2 (ja) | エンジン始動システム | |
| JP2013006542A (ja) | 電動ステアリングロック装置 | |
| JP5283603B2 (ja) | 電動ステアリングロック装置 | |
| JP2015101200A (ja) | 電動ステアリングロック装置 | |
| JP6367678B2 (ja) | 電動ステアリングロック装置 | |
| JP2014201128A (ja) | 電動ステアリングロック装置 | |
| JP2015101202A (ja) | 電動ステアリングロック装置 | |
| CN105015485B (zh) | 电动转向锁定装置 | |
| JP6685703B2 (ja) | 電動ステアリングロック装置 | |
| JP5646093B2 (ja) | 電動ステアリングロック装置 | |
| JP6669415B2 (ja) | ステアリングロック・舵角検出複合装置 | |
| JP2017007530A (ja) | 電動ステアリングロック装置 | |
| JP2012056539A (ja) | 電動ステアリングロック装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190613 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6542556 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |