JP6540261B2 - 高速度撮像システム及び高速度撮像方法 - Google Patents
高速度撮像システム及び高速度撮像方法 Download PDFInfo
- Publication number
- JP6540261B2 JP6540261B2 JP2015123230A JP2015123230A JP6540261B2 JP 6540261 B2 JP6540261 B2 JP 6540261B2 JP 2015123230 A JP2015123230 A JP 2015123230A JP 2015123230 A JP2015123230 A JP 2015123230A JP 6540261 B2 JP6540261 B2 JP 6540261B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- image
- speed
- image processing
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
- Studio Devices (AREA)
Description
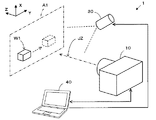
第1の実施の形態の高速度撮像システム1は、図1に示すように、撮像装置10(高速度撮像手段に相当)、光源30、画像処理装置40(画像処理手段に相当)等にて構成されている。撮像装置10の光軸JZの方向は、高速移動する撮像対象物W1の方向に向けられている。
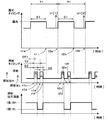
図2に示す露光タイミングは、画像処理装置40から撮像装置10へ出力される露光タイミング信号の例である。露光タイミング信号は、第1所定時間T1の間隔で出力される。例えば撮像装置10は、図2中の時刻t1aで(露光タイミング信号の立上りで)撮像を開始し、露光時間S1(第1所定時間T1>露光時間S1)の間で露光を行う。そして撮像装置10は、図2中の時刻t1hで露光を終了した後、画像G1[1]を作成する。同様にして撮像装置10は、画像G1[2]等を次々と作成する。
次に図3に示すフローチャートを用いて、画像処理装置40の処理手順の例を説明する。画像処理装置40は、ユーザから起動されて撮像対象物W1の移動速度の計測の実行が指示されると、図3に示す処理を開始し、ステップS10に進む。
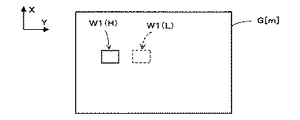
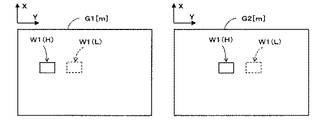
(1)ステップS70にて求めた第2移動速度が、第1所定速度未満である場合。例えば、図4の画像G[m]中の撮像対象物W1(H)と、図4の画像G[m+1]中の撮像対象物W1(H)とが重なる場合。第1所定速度は適宜設定される。
(2)ステップS70にて求めた第2移動速度が、第1所定速度よりも高い第2所定速度以上である場合。例えば、図4の画像G[m]中の撮像対象物W1(H)と、図4の画像G[m+1]中の撮像対象物W1(H)との間の距離が、相互相関関数の検索範囲を超える距離の場合、または移動速度が非常に速く、画像G[m+1]中に撮像対象物W1(H)が撮像されていない場合。第2所定速度は適宜設定される。
(3)図4の画像G[m]中と、図4の画像G[m+1]中に、撮像対象物に近似する物体である撮像対象近似物体が撮像されていて、相互相関関数にて撮像対象物と撮像対象近似物体とが区別できない場合。例えば玉軸受の複数の鋼球の中の1つ、液体中の複数の泡の中の1つを撮像対象物とした場合、撮像対象物と撮像対象物近似物体とを区別できない場合がある。
第2の実施の形態の高速度撮像システム2は、図8に示すように、第1撮像装置11(高速度撮像手段に相当)、第2撮像装置20(高速度撮像手段に相当)、光源30、画像処理装置41(画像処理手段に相当)、ハーフミラー50等にて構成されている。第1撮像装置11の光軸JZは、ハーフミラー50を透過した先に、高速移動する撮像対象物W1が位置する方向に向けられている。第2撮像装置20の光軸JXは、ハーフミラー50の傾斜面50Mにて反射した先に、高速移動する撮像対象物W1が位置する方向に向けられている。第1撮像装置11の撮像エリアと、第2撮像装置20の撮像エリアは、ともに図8中の撮像エリアA1である。以下、第1の実施の形態との相違点について主に説明する。
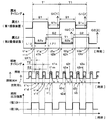
図9に示す露光タイミングにおける「露光1」は画像処理装置41から第1撮像装置11へ出力される露光タイミング信号を示しており、「露光2」は画像処理装置41から第2撮像装置20へ出力される露光タイミング信号を示している。「露光1」については、図2に示す第1の実施の形態と同じである。
画像処理装置41の処理手順は、図3に示す第1の実施の形態の処理手順に対して、以下のステップの処理が異なる。
10 撮像装置(高速度撮像撮像手段)
11 第1撮像装置(高速度撮像撮像手段)
20 第2撮像装置(高速度撮像撮像手段)
30 光源
40、41 画像処理装置(画像処理手段)
A1 撮像エリア
T1 第1所定時間
T2 第2所定時間
S1、S2 露光時間
S1x、S2x 非露光時間
W1 撮像対象物
JZ、JX (撮像装置の)光軸
Claims (3)
- 運動している撮像対象物に向けられた高速度撮像手段と、
前記撮像対象物に照射光を照射する光源と、
前記高速度撮像手段が撮像した画像を処理する画像処理手段と、を有する高速度撮像システムであって、
前記高速度撮像手段は、第1所定時間の間隔にて次々と画像を撮像し、撮像した前記画像を前記画像処理手段に出力し、
前記光源は、パルス光源であり、前記高速度撮像手段が各画像を撮像している露光時間内において、異なる出力強度で複数の照射光を、前記露光時間よりも短い第2所定時間の間隔で照射し、
前記画像処理手段は、
前記高速度撮像手段から前記画像を取り込み、
複数の前記画像の中の1つの画像と、当該画像の1つ後の画像と、に相互相関関数を適用して前記撮像対象物を含む領域を検索し、検索した前記領域の移動距離を求め、求めた移動距離と、前記第1所定時間と、に基づいて前記撮像対象物の移動速度である第1移動速度を求め、
前記画像に撮像されている前記撮像対象物であって前記光源からの異なるそれぞれの出力強度の照射光に応じたそれぞれの輝度範囲の輝度を有する複数の前記撮像対象物を前記画像の中から抽出し、抽出したそれぞれの前記撮像対象物の輝度中心位置から求めた移動距離と、前記第2所定時間と、に基づいて前記撮像対象物の移動速度である第2移動速度を求め、
所定条件を満足する場合は、前記第2移動速度を前記撮像対象物の移動速度と判定し、前記所定条件を満足しない場合は、前記第1移動速度を前記撮像対象物の移動速度と判定する、
高速度撮像システム。 - 請求項1に記載の高速度撮像システムであって、
前記所定条件を満足する場合とは、
求めた前記第2移動速度が第1所定速度未満である場合、
求めた前記第2移動速度が前記第1所定速度よりも高い第2所定速度以上である場合、
前記画像中に前記撮像対象物に加えて前記撮像対象物に近似する物体である撮像対象近似物体が撮像されていて前記相互相関関数にて前記撮像対象物と前記撮像対象近似物体とが区別できない場合、
の少なくとも1つが成立している場合である、
高速度撮像システム。 - 運動する撮像対象物に向けられて第1所定時間の間隔にて次々と画像を撮像し、撮像した前記画像を画像処理手段に出力する高速度撮像手段と、
前記撮像対象物に向けられた光源と、
前記高速度撮像手段が撮像した画像を取り込んで前記撮像対象物の移動速度を求める画像処理手段と、を用いた高速度撮像方法であって、
前記高速度撮像手段にて画像の撮像を開始する撮像開始ステップと、
前記高速度撮像手段にて前記画像を撮像するとともに、各画像を撮像している露光時間内において、前記光源から、異なる出力強度で複数の照射光を、前記露光時間よりも短い第2所定時間の間隔で照射する撮像ステップと、
前記高速度撮像手段が撮像した画像を前記高速度撮像手段から前記画像処理手段へと出力して、前記画像処理手段にて前記画像を取り込む画像転送ステップと、
前記画像処理手段にて、取り込んだ前記画像に撮像されている前記撮像対象物であって前記光源の異なる出力強度の照射光に応じた異なる輝度の複数の前記撮像対象物を前記画像の中から抽出する撮像対象物抽出ステップと、
前記画像処理手段にて、複数の前記画像の中の1つの画像と、当該画像の1つ後の画像と、に相互相関関数を適用して前記撮像対象物を含む領域を検索し、検索した前記領域の移動距離を求め、求めた移動距離と、前記第1所定時間と、に基づいて前記撮像対象物の移動速度である第1移動速度を求める第1移動速度算出ステップと、
前記画像処理手段にて、前記画像に撮像されている前記撮像対象物であって前記光源からの異なるそれぞれの出力強度の照射光に応じたそれぞれの輝度範囲の輝度を有する複数の前記撮像対象物を前記画像の中から抽出し、抽出したそれぞれの前記撮像対象物の輝度中心位置から求めた移動距離と、前記第2所定時間と、に基づいて前記撮像対象物の移動速度である第2移動速度を求める第2移動速度算出ステップと、
前記画像処理手段にて、所定条件を満足する場合は、前記第2移動速度を前記撮像対象物の移動速度と判定し、前記所定条件を満足しない場合は、前記第1移動速度を前記撮像対象物の移動速度と判定する移動速度判定ステップと、を有する、
高速度撮像方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015123230A JP6540261B2 (ja) | 2015-06-18 | 2015-06-18 | 高速度撮像システム及び高速度撮像方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015123230A JP6540261B2 (ja) | 2015-06-18 | 2015-06-18 | 高速度撮像システム及び高速度撮像方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017009354A JP2017009354A (ja) | 2017-01-12 |
| JP6540261B2 true JP6540261B2 (ja) | 2019-07-10 |
Family
ID=57761486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015123230A Expired - Fee Related JP6540261B2 (ja) | 2015-06-18 | 2015-06-18 | 高速度撮像システム及び高速度撮像方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6540261B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7312129B2 (ja) * | 2020-02-27 | 2023-07-20 | 株式会社日立製作所 | 計測装置、エレベーターシステム、および計測方法 |
| CN111647506B (zh) * | 2020-05-18 | 2023-11-03 | 深圳市真迈生物科技有限公司 | 定位方法、定位装置和测序系统 |
| CN115379132B (zh) * | 2022-08-19 | 2023-08-08 | 上海交通大学 | 基于高频闪光源的双相机快速空间轨迹捕获方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5757265A (en) * | 1980-09-25 | 1982-04-06 | Mitsubishi Heavy Ind Ltd | Method for measuring flow trace speed |
| JPS63298065A (ja) * | 1987-05-28 | 1988-12-05 | Babcock Hitachi Kk | 物体の速度測定装置 |
| JP3559816B2 (ja) * | 1997-08-27 | 2004-09-02 | 独立行政法人 宇宙航空研究開発機構 | 流速計測方法および流速計測装置 |
| JP4822004B2 (ja) * | 2006-12-28 | 2011-11-24 | カシオ計算機株式会社 | 撮影装置及びそのプログラム |
| WO2008156022A1 (ja) * | 2007-06-18 | 2008-12-24 | Yasunori Onozuka | 物体を測定する方法及び装置 |
| KR101697648B1 (ko) * | 2011-06-15 | 2017-01-18 | 한국전자통신연구원 | 다중 노출 카메라 영상을 이용한 자동 고속 이동 물체 검출 방법 |
-
2015
- 2015-06-18 JP JP2015123230A patent/JP6540261B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017009354A (ja) | 2017-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5852527B2 (ja) | 3次元形状測定方法および基板検査方法 | |
| JP6447516B2 (ja) | 画像処理装置、および画像処理方法 | |
| TWI448681B (zh) | 物件之二維與三維光學檢視方法及設備與物件之光學檢視資料的取得方法及設備 | |
| JP6244299B2 (ja) | 画像を生成し評価するための方法 | |
| JP2014517601A5 (ja) | ||
| JP2005201861A (ja) | 3次元視覚センサ | |
| JP6540261B2 (ja) | 高速度撮像システム及び高速度撮像方法 | |
| US9729798B2 (en) | Image-capturing apparatus which controls image-capturing direction | |
| JP2017208606A5 (ja) | ||
| US10542875B2 (en) | Imaging device, endoscope apparatus, and imaging method | |
| JP2008015815A (ja) | 画像処理装置、および画像処理プログラム | |
| JP2011174896A (ja) | 撮像装置及び撮像方法 | |
| JP4871315B2 (ja) | 複眼撮影装置およびその制御方法並びにプログラム | |
| JP6969739B2 (ja) | 位置情報取得システム、位置情報取得方法及びプログラム | |
| JP2013118429A (ja) | 撮像装置、及び撮像方法 | |
| WO2018193704A1 (ja) | 信号処理システム、信号処理装置、及び信号処理方法 | |
| KR102386673B1 (ko) | 오브젝트 검출 방법 및 장치 | |
| WO2014073590A1 (ja) | 3次元計測装置および3次元計測方法 | |
| KR101649181B1 (ko) | 비행물체의 비행정보 추정 장치 및 비행정보 추정 방법 | |
| WO2016199328A1 (ja) | 照明装置、撮像システムおよび照明方法 | |
| JP6633140B2 (ja) | 常時キャリブレーションシステム及びその方法 | |
| WO2020044809A1 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JPH0252204A (ja) | 3次元座標計測装置 | |
| KR101702577B1 (ko) | 저 시정 환경에서도 활용 가능한 공간 분할을 이용한 물체의 영상 획득 장치 | |
| JP2013174446A (ja) | 3次元情報検出装置および3次元情報検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6540261 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |