JP6532190B2 - 画像検索装置、画像検索方法 - Google Patents
画像検索装置、画像検索方法 Download PDFInfo
- Publication number
- JP6532190B2 JP6532190B2 JP2014064342A JP2014064342A JP6532190B2 JP 6532190 B2 JP6532190 B2 JP 6532190B2 JP 2014064342 A JP2014064342 A JP 2014064342A JP 2014064342 A JP2014064342 A JP 2014064342A JP 6532190 B2 JP6532190 B2 JP 6532190B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- feature
- search
- captured
- acquired
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G06F18/2411—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches based on the proximity to a decision surface, e.g. support vector machines
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/50—Extraction of image or video features by performing operations within image blocks; by using histograms, e.g. histogram of oriented gradients [HoG]; by summing image-intensity values; Projection analysis
Description
前記選択手段が選択したカメラを選択カメラとし、該選択カメラによる撮像画像群のうち規定の撮像期間内に撮像されたそれぞれのフレームの撮像画像から、フレーム間で変化量が規定値以下となる領域を抽出し、該抽出した領域内の画像を合成した合成画像を、検索対象物が写っていない画像である、前記選択カメラに対応する背景画像として取得する取得手段と、
前記複数のカメラのいずれかにより撮像された撮像画像からユーザにより選択された撮像画像において、該ユーザにより指定された前記検索対象物が写っている領域の画像をクエリ画像として取得する手段と、
前記選択カメラに対応する背景画像と前記クエリ画像のそれぞれをパターン画像とし、該パターン画像から、それぞれ異なる種類の特徴量を抽出し、前記選択カメラによる撮像画像から前記検索対象物を識別するための選択カメラ毎の識別器を該それぞれ異なる種類の特徴量を用いて学習することで、該それぞれ異なる種類の特徴量に対する重みを、該学習の結果とする学習手段と、
前記学習手段により学習された識別器を用いて、前記選択カメラによる撮像画像群から前記検索対象物を検索する検索手段と
を備え、
前記検索手段は、
前記撮像画像群から撮像画像を順次取得し、該取得した撮像画像から前記それぞれ異なる種類の特徴量を順次抽出し、該抽出した特徴量と該特徴量に対応する重みとを用いて前記抽出した特徴量に対する評価値を計算する計算処理を行い、該評価値が閾値以上であれば、前記取得した撮像画像から次の特徴量を抽出して該次の特徴量に対する評価値を前記計算処理により計算し、該次の特徴量に対する評価値が閾値未満であれば、前記取得した撮像画像に対する処理を終了して前記撮像画像群から次の撮像画像を取得し、前記取得した撮像画像から抽出した前記それぞれ異なる種類の特徴量の何れの評価値も閾値以上であれば、該取得した撮像画像を検索結果として出力することを特徴とする。
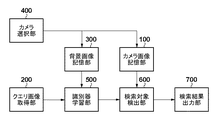
先ず、本実施形態に係るシステムの概略構成例について、図2を用いて説明する。図2に示す如く、本実施形態に係る画像検索装置1000には、複数台のカメラ(カメラ11,12,…,N)が接続されており、画像検索装置1000には、それぞれのカメラによる撮像画像が入力されることになる。なお、画像検索装置1000とそれぞれのカメラとの間の接続は有線接続であっても良いし、無線接続であっても良い。
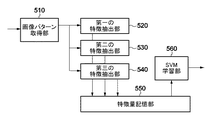
そして第三の特徴抽出部540は、画素ブロック毎に求めたHOG特徴を連結して7×15×9=945次元の色特徴とし、該945次元の色特徴を、特徴量記憶部550に格納する。第三の特徴抽出部540がパターン画像から抽出した色特徴(第三の特徴)は、上記の文献Aによると、人物の輪郭を精度よく捉える事が可能であり、エッジ特性を表すことで色特徴を補完する。
x1i,x2i,x3iはそれぞれ、画像パターン取得部510が選択カメラについてi番目に取得したパターン画像から抽出された第一の特徴、第二の特徴、第三の特徴であり、xiは、x1i,x2i,x3iを連結した色特徴(第四の特徴)である。また、yiは、画像パターン取得部510がi番目に取得したパターン画像の画像ラベルである。
ここで、x1,x2,x3,xはそれぞれ、第一の特徴、第二の特徴、第三の特徴、第四の特徴である。そして第四のパターン識別部664は、内積演算結果と、規定の閾値「0」との大小比較を行う。この大小比較の結果、内積演算結果が規定の閾値「0」以上となる場合には、ステップS610で抽出したパターン画像に検索対象物が含まれていると判断し、処理はステップS690に進む。この場合、ステップS690では、検索結果出力部700は、ステップS610で抽出したパターン画像に検索対象物が含まれている旨を出力する。一方、内積演算結果が規定の閾値未満である場合には、ステップS610で抽出したパターン画像には検索対象物は含まれていないと判断し、処理はステップS690に進む。この場合、ステップS690では、検索結果出力部700は、ステップS610で抽出したパターン画像には検索対象物は含まれていない旨を出力する。なお、この場合における検索結果出力部700の動作については特定の動作に限るものではなく、何もしなくても良い。
第1の実施形態では、前段の識別処理を色特徴による識別処理とした。したがって、特定の服装色の人物の検索に好適である。しかしながら、検索対象の人物が色でなく、服装の模様に特徴のある場合には、前段の識別処理をエッジにもとづく演算量の少ない特徴による識別処理とした方がよい。すなわち、検索対象に応じて特徴を選択してカスケード型識別器を構成するようにした方がよい。本実施形態ではこのような考え方にもとづいた構成とした。
図1に示した各機能部は何れもハードウェアで構成しても良いが、一部をソフトウェア(コンピュータプログラム)で構成しても良い。この場合、背景画像記憶部300、カメラ画像記憶部100、特徴量記憶部550、630、850(保持機能のみ)をメモリとして有し、且つそれ以外の機能部に対応するソフトウェアを実行可能な装置であれば、画像検索装置1000に適用可能である。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (7)
- 複数のカメラのそれぞれを順次選択する選択手段と、
前記選択手段が選択したカメラを選択カメラとし、該選択カメラによる撮像画像群のうち規定の撮像期間内に撮像されたそれぞれのフレームの撮像画像から、フレーム間で変化量が規定値以下となる領域を抽出し、該抽出した領域内の画像を合成した合成画像を、検索対象物が写っていない画像である、前記選択カメラに対応する背景画像として取得する取得手段と、
前記複数のカメラのいずれかにより撮像された撮像画像からユーザにより選択された撮像画像において、該ユーザにより指定された前記検索対象物が写っている領域の画像をクエリ画像として取得する手段と、
前記選択カメラに対応する背景画像と前記クエリ画像のそれぞれをパターン画像とし、該パターン画像から、それぞれ異なる種類の特徴量を抽出し、前記選択カメラによる撮像画像から前記検索対象物を識別するための選択カメラ毎の識別器を該それぞれ異なる種類の特徴量を用いて学習することで、該それぞれ異なる種類の特徴量に対する重みを、該学習の結果とする学習手段と、
前記学習手段により学習された識別器を用いて、前記選択カメラによる撮像画像群から前記検索対象物を検索する検索手段と
を備え、
前記検索手段は、
前記撮像画像群から撮像画像を順次取得し、該取得した撮像画像から前記それぞれ異なる種類の特徴量を順次抽出し、該抽出した特徴量と該特徴量に対応する重みとを用いて前記抽出した特徴量に対する評価値を計算する計算処理を行い、該評価値が閾値以上であれば、前記取得した撮像画像から次の特徴量を抽出して該次の特徴量に対する評価値を前記計算処理により計算し、該次の特徴量に対する評価値が閾値未満であれば、前記取得した撮像画像に対する処理を終了して前記撮像画像群から次の撮像画像を取得し、前記取得した撮像画像から抽出した前記それぞれ異なる種類の特徴量の何れの評価値も閾値以上であれば、該取得した撮像画像を検索結果として出力することを特徴とする画像検索装置。 - 前記それぞれ異なる種類の特徴量は、それぞれ異なる次元数の特徴量であり、前記検索手段は、前記それぞれ異なる次元数の特徴量を次元数の低い順に抽出することを特徴とする請求項1に記載の画像検索装置。
- 前記それぞれ異なる次元数をD1、D2、…、DN(Nは2以上の整数)とし、且つD1<D2<…<DNである場合に、
前記検索手段は、
前記取得した撮像画像から抽出した次元数Di(1≦i<N−1)の特徴量と、該次元数Diの特徴量に対応する重みと、を用いて評価値E(i)を計算し、該評価値E(i)が閾値以上であれば、前記取得した撮像画像について評価値E(i+1)を計算し、前記評価値E(i)が閾値未満であれば、前記取得した撮像画像に対する処理を終了して前記撮像画像群から次の撮像画像を取得し、
前記取得した撮像画像について評価値E(N)が閾値以上であれば、該取得した撮像画像を検索結果として出力する
ことを特徴とする請求項2に記載の画像検索装置。 - 前記それぞれ異なる種類の特徴量について、該特徴量を用いて学習した前記識別器の識別評価を行う評価手段を更に備え、
前記検索手段は、前記それぞれ異なる種類の特徴量を前記識別評価の高い順に抽出することを特徴とする請求項1に記載の画像検索装置。 - 前記それぞれ異なる種類の特徴量は、それぞれ異なる次元数の特徴量であり、
前記それぞれ異なる次元数をD1、D2、…、DN(Nは2以上の整数)とし、且つD1<D2<…<DNである場合に、
更に、
前記評価手段は、次元数D1、D2、…、DNのそれぞれについて、該次元数の特徴量を用いて学習した前記識別器の識別評価を行い、
次元数D1、D2、…、DNを識別評価の高い順に並べた結果を、D’1、D’2、…、D’Nとしたときに、
前記検索手段は、
前記取得した撮像画像から抽出した次元数D’i(1≦i<N−1)の特徴量と、該次元数D’iの特徴量に対応する重みと、を用いて評価値E(i)を計算し、該評価値E(i)が閾値以上であれば、前記取得した撮像画像について評価値E(i+1)を計算し、前記評価値E(i)が閾値未満であれば、前記取得した撮像画像に対する処理を終了して前記撮像画像群から次の撮像画像を取得し、
前記取得した撮像画像について評価値E(N)が閾値以上であれば、該取得した撮像画像を検索結果として出力する
ことを特徴とする請求項4に記載の画像検索装置。 - 画像検索装置が行う画像検索方法であって、
前記画像検索装置の選択手段が、複数のカメラのそれぞれを順次選択する選択工程と、
前記画像検索装置の取得手段が、前記選択工程で選択したカメラを選択カメラとし、該選択カメラによる撮像画像群のうち規定の撮像期間内に撮像されたそれぞれのフレームの撮像画像から、フレーム間で変化量が規定値以下となる領域を抽出し、該抽出した領域内の画像を合成した合成画像を、検索対象物が写っていない画像である、前記選択カメラに対応する背景画像として取得する取得工程と、
前記画像検索装置のクエリ画像取得手段が、前記複数のカメラのいずれかにより撮像された撮像画像からユーザにより選択された撮像画像において、該ユーザにより指定された前記検索対象物が写っている領域の画像をクエリ画像として取得する工程と、
前記画像検索装置の学習手段が、前記選択カメラに対応する背景画像と前記クエリ画像のそれぞれをパターン画像とし、該パターン画像から、それぞれ異なる種類の特徴量を抽出し、前記選択カメラによる撮像画像から前記検索対象物を識別するための選択カメラ毎の識別器を該それぞれ異なる種類の特徴量を用いて学習することで、該それぞれ異なる種類の特徴量に対する重みを、該学習の結果とする学習工程と、
前記画像検索装置の検索手段が、前記学習工程で学習された識別器を用いて、前記選択カメラによる撮像画像群から前記検索対象物を検索する検索工程と
を備え、
前記検索工程では、
前記撮像画像群から撮像画像を順次取得し、該取得した撮像画像から前記それぞれ異なる種類の特徴量を順次抽出し、該抽出した特徴量と該特徴量に対応する重みとを用いて前記抽出した特徴量に対する評価値を計算する計算処理を行い、該評価値が閾値以上であれば、前記取得した撮像画像から次の特徴量を抽出して該次の特徴量に対する評価値を前記計算処理により計算し、該次の特徴量に対する評価値が閾値未満であれば、前記取得した撮像画像に対する処理を終了して前記撮像画像群から次の撮像画像を取得し、前記取得した撮像画像から抽出した前記それぞれ異なる種類の特徴量の何れの評価値も閾値以上であれば、該取得した撮像画像を検索結果として出力することを特徴とする画像検索方法。 - コンピュータを、請求項1乃至5の何れか1項に記載の画像検索装置の各手段として機能させるためのコンピュータプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014064342A JP6532190B2 (ja) | 2014-03-26 | 2014-03-26 | 画像検索装置、画像検索方法 |
| US14/658,590 US9633264B2 (en) | 2014-03-26 | 2015-03-16 | Object retrieval using background image and query image |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014064342A JP6532190B2 (ja) | 2014-03-26 | 2014-03-26 | 画像検索装置、画像検索方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015187759A JP2015187759A (ja) | 2015-10-29 |
| JP2015187759A5 JP2015187759A5 (ja) | 2017-05-18 |
| JP6532190B2 true JP6532190B2 (ja) | 2019-06-19 |
Family
ID=54191122
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014064342A Active JP6532190B2 (ja) | 2014-03-26 | 2014-03-26 | 画像検索装置、画像検索方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9633264B2 (ja) |
| JP (1) | JP6532190B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10776926B2 (en) * | 2016-03-17 | 2020-09-15 | Avigilon Corporation | System and method for training object classifier by machine learning |
| KR101930400B1 (ko) | 2017-01-31 | 2018-12-18 | (주)한국플랫폼서비스기술 | 딥러닝 분석을 위한 모듈화시스템을 이용한 컨텐츠 제공 방법 |
| CN107194406A (zh) * | 2017-05-09 | 2017-09-22 | 重庆大学 | 一种基于cs特征值的全景机器视觉目标识别方法 |
| JP7085812B2 (ja) | 2017-08-02 | 2022-06-17 | キヤノン株式会社 | 画像処理装置およびその制御方法 |
| JP6888484B2 (ja) * | 2017-08-29 | 2021-06-16 | 富士通株式会社 | 検索プログラム、検索方法、及び、検索プログラムが動作する情報処理装置 |
| CN108288073A (zh) * | 2018-01-30 | 2018-07-17 | 北京小米移动软件有限公司 | 图片真伪识别方法及装置、计算机可读存储介质 |
| JP7180117B2 (ja) * | 2018-05-24 | 2022-11-30 | 大日本印刷株式会社 | 印画物販売システム |
| JP7068654B2 (ja) * | 2018-06-07 | 2022-05-17 | オムロン株式会社 | センサシステム |
| KR20200040097A (ko) | 2018-10-08 | 2020-04-17 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| EP3951704A4 (en) * | 2019-04-04 | 2022-05-25 | Panasonic Intellectual Property Management Co., Ltd. | INFORMATION PROCESSING PROCEDURES AND INFORMATION PROCESSING SYSTEM |
| KR102649806B1 (ko) * | 2021-12-01 | 2024-03-21 | 주식회사 포딕스시스템 | 객체 이미지 표준화 장치 및 방법 |
| CN115269912B (zh) * | 2022-09-29 | 2023-01-06 | 浙江省公众信息产业有限公司无线运营分公司 | 图像检索方法及系统 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001155163A (ja) * | 1999-11-26 | 2001-06-08 | Ntt Communications Kk | 移動物体切り出し装置 |
| JP3994819B2 (ja) * | 2002-07-31 | 2007-10-24 | 富士ゼロックス株式会社 | 画像識別装置、画像識別方法、画像識別プログラム |
| JP4378261B2 (ja) | 2004-10-27 | 2009-12-02 | キヤノン株式会社 | 画像処理方法、画像処理装置 |
| JP2006163614A (ja) * | 2004-12-03 | 2006-06-22 | Matsushita Electric Ind Co Ltd | 画像処理装置、および画像処理方法 |
| JP2009282699A (ja) * | 2008-05-21 | 2009-12-03 | Seiko Epson Corp | 画像における顔の器官の画像に対応する器官領域の検出 |
| JP2011002882A (ja) * | 2009-06-16 | 2011-01-06 | Olympus Corp | 撮像装置、画像処理プログラム、および撮像方法 |
| EP2397989A1 (en) * | 2010-02-01 | 2011-12-21 | Morpho, Inc. | Object detection device and object detection method |
| JP5675233B2 (ja) | 2010-09-09 | 2015-02-25 | キヤノン株式会社 | 情報処理装置、その認識方法及びプログラム |
| JP5701005B2 (ja) | 2010-10-15 | 2015-04-15 | キヤノン株式会社 | 物体検知装置、物体検知方法、監視カメラシステム、およびプログラム |
| JP2012088787A (ja) * | 2010-10-15 | 2012-05-10 | Canon Inc | 画像処理装置、画像処理方法 |
| JP5706131B2 (ja) * | 2010-11-05 | 2015-04-22 | グローリー株式会社 | 被写体検出方法および被写体検出装置 |
| CN102741882B (zh) * | 2010-11-29 | 2015-11-25 | 松下电器(美国)知识产权公司 | 图像分类装置、图像分类方法、集成电路、模型制作装置 |
| JP5755012B2 (ja) | 2011-04-21 | 2015-07-29 | キヤノン株式会社 | 情報処理装置、その処理方法、プログラム及び撮像装置 |
| JP5719230B2 (ja) | 2011-05-10 | 2015-05-13 | キヤノン株式会社 | 物体認識装置、物体認識装置の制御方法、およびプログラム |
| JP5801601B2 (ja) | 2011-05-10 | 2015-10-28 | キヤノン株式会社 | 画像認識装置、画像認識装置の制御方法、およびプログラム |
| US9305024B2 (en) * | 2011-05-31 | 2016-04-05 | Facebook, Inc. | Computer-vision-assisted location accuracy augmentation |
| JP5907593B2 (ja) | 2011-09-13 | 2016-04-26 | キヤノン株式会社 | 画像認識装置、画像認識方法及びプログラム |
| US9916538B2 (en) * | 2012-09-15 | 2018-03-13 | Z Advanced Computing, Inc. | Method and system for feature detection |
| JP5913940B2 (ja) | 2011-12-01 | 2016-05-11 | キヤノン株式会社 | 画像認識装置、画像認識装置の制御方法、およびプログラム |
| JP5836095B2 (ja) | 2011-12-05 | 2015-12-24 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| JP6041515B2 (ja) | 2012-04-11 | 2016-12-07 | キヤノン株式会社 | 画像処理装置および画像処理方法 |
| JP6046948B2 (ja) | 2012-08-22 | 2016-12-21 | キヤノン株式会社 | 物体検知装置及びその制御方法、プログラム、並びに記憶媒体 |
| JP6351240B2 (ja) | 2013-11-20 | 2018-07-04 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US9633042B2 (en) * | 2014-02-28 | 2017-04-25 | Nant Holdings Ip, Llc | Object recognition trait analysis systems and methods |
-
2014
- 2014-03-26 JP JP2014064342A patent/JP6532190B2/ja active Active
-
2015
- 2015-03-16 US US14/658,590 patent/US9633264B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9633264B2 (en) | 2017-04-25 |
| US20150279054A1 (en) | 2015-10-01 |
| JP2015187759A (ja) | 2015-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6532190B2 (ja) | 画像検索装置、画像検索方法 | |
| AU2022252799B2 (en) | System and method for appearance search | |
| US9626551B2 (en) | Collation apparatus and method for the same, and image searching apparatus and method for the same | |
| Marée et al. | Random subwindows for robust image classification | |
| JP5202148B2 (ja) | 画像処理装置、画像処理方法、及びコンピュータプログラム | |
| US8144932B2 (en) | Image processing apparatus, image processing method, and interface apparatus | |
| KR102385463B1 (ko) | 얼굴 특징 추출 모델 학습 방법, 얼굴 특징 추출 방법, 장치, 디바이스 및 저장 매체 | |
| JP6254836B2 (ja) | 画像検索装置、画像検索装置の制御方法およびプログラム | |
| Haque et al. | Two-handed bangla sign language recognition using principal component analysis (PCA) and KNN algorithm | |
| EP3410396B1 (en) | Moving object tracking apparatus, moving object tracking method, and computer-readable medium | |
| KR101299031B1 (ko) | 손 제스처 인식 장치 및 그 방법 | |
| JP5538781B2 (ja) | 画像検索装置及び画像検索方法 | |
| AU2019303730B2 (en) | Hash-based appearance search | |
| JP5552946B2 (ja) | 顔画像サンプル採取装置、顔画像サンプル採取方法、プログラム | |
| Hashim et al. | Face detection by using haar cascade classifier | |
| JP2015187770A (ja) | 画像認識装置、画像認識方法及びプログラム | |
| Naveen et al. | Pose and head orientation invariant face detection based on optimised aggregate channel feature | |
| JP4838272B2 (ja) | 映像インデキシング装置,映像インデキシング方法,映像インデキシングプログラムおよびその記録媒体 | |
| Colmenarez et al. | Pattern detection with information-based maximum discrimination and error bootstrapping | |
| Chen et al. | Margin-constrained multiple kernel learning based multi-modal fusion for affect recognition | |
| Ren et al. | Real-time head pose estimation on mobile platforms | |
| Sathish et al. | Person re-identification using part based hybrid descriptor | |
| Wang | Color-based Human Hand Segmentation Based on Smart Classification of Dynamic Environments | |
| Moussi et al. | Person Re-identification Using Soft Biometrics | |
| Wei et al. | Person re-identification based on adaptive feature selection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170327 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190521 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6532190 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |