JP6522441B2 - 作業機械の作業支援システム - Google Patents
作業機械の作業支援システム Download PDFInfo
- Publication number
- JP6522441B2 JP6522441B2 JP2015129815A JP2015129815A JP6522441B2 JP 6522441 B2 JP6522441 B2 JP 6522441B2 JP 2015129815 A JP2015129815 A JP 2015129815A JP 2015129815 A JP2015129815 A JP 2015129815A JP 6522441 B2 JP6522441 B2 JP 6522441B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- excavation
- digging
- distance
- work position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000009412 basement excavation Methods 0.000 claims description 96
- 238000005553 drilling Methods 0.000 claims description 27
- 238000001514 detection method Methods 0.000 claims description 4
- 238000000034 method Methods 0.000 description 43
- 238000004364 calculation method Methods 0.000 description 41
- 238000012876 topography Methods 0.000 description 20
- 230000008569 process Effects 0.000 description 14
- 238000012545 processing Methods 0.000 description 9
- 102100035767 Adrenocortical dysplasia protein homolog Human genes 0.000 description 4
- 101000929940 Homo sapiens Adrenocortical dysplasia protein homolog Proteins 0.000 description 4
- 240000004050 Pentaglottis sempervirens Species 0.000 description 4
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000015654 memory Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




















Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2029—Controlling the position of implements in function of its load, e.g. modifying the attitude of implements in accordance to vehicle speed
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- B60K35/81—
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2041—Automatic repositioning of implements, i.e. memorising determined positions of the implement
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
Description
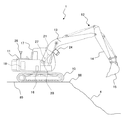
図1及び図2を用いて、作業機械、および作業機械に備えられる作業支援システムの構成について説明する。
Ls=sb/H…式(1)
Wd=Ls+Lm…式(2)
Lw=Lb−Wd…式(3)
図9は油圧ショベル1に搭載され、作業位置を表示する作業機械の作業支援システムの他の構成を示す概観図である。この図の作業位置算出部30は、図2に示した作業位置算出部30が備える構成に加えて、安定領域設定部33と、走行判定部35と、表示更新部36を備えている。
Ln’=Ln×cos(ad)−Hn×sin(ad)−Ld
Hn’=Ln×sin(ad)+Hn×cos(ad)−Hd ・・・(7)
Lst=H/tan(as)…式(4)
Lws=Lu−Lst…式(5)
Wds=Lb−Lws…式(6)
本実施形態に係る作業機械の作業支援システムの構成は図9と同じとする。図15は第3実施形態に係る作業位置算出部30の処理を示すフローチャートである。
本実施形態に係る作業機械の作業支援システムの構成も図9と同じとする。図16は第4実施形態に係る作業位置算出部30の処理を示すフローチャートである。
Claims (4)
- 自走可能な作業機械の作業支援システムにおいて、
前記作業機械の1回の掘削動作による想定掘削量に基づいて、前記作業機械の1回の掘削動作により掘削対象から前記想定掘削量が得られる領域を掘削領域として決定し、当該掘削領域に基づいて次回の掘削動作を行う際の前記作業機械の作業位置を算出するように構成された制御装置と、
前記作業位置に関する情報を表示する表示装置とを備え、
前記掘削対象は、前記作業機械が掘削作業時に載る上面と、当該上面に接続する下り傾斜面である掘削面とを有し、
前記制御装置は、前記上面の基準面からの高さと前記想定掘削量に基づいて前記掘削領域を決定し、前記上面と前記掘削面の境界部に定義された基準点から前記作業位置までの距離を前記掘削領域に基づいて算出し、前記距離に基づいて前記作業位置を算出するように構成されていることを特徴とする作業機械の作業支援システム。 - 請求項1に記載の作業機械の作業支援システムにおいて、
前記掘削対象の表面形状を検出する形状検出装置をさらに備え、
前記制御装置は、前記形状検出装置により検出された前記表面形状に基づいて前記掘削対象の表面形状画像を作成するように構成されており、
前記表示装置は、さらに、前記表面形状画像上に前記掘削領域を表示することを特徴とする作業機械の作業支援システム。 - 請求項2に記載の作業機械の作業支援システムにおいて、
前記制御装置は、前記作業機械が動作したとき、前記作業機械の操作装置に入力があったとき、及び、前記表面形状が変化したときの少なくとも1つが確認されたとき、前記作業機械の作業位置を改めて算出するように構成されており、
前記表示装置は、前記改めて算出された作業位置に関する情報を表示することを特徴とする作業機械の作業支援システム。 - 請求項3に記載の作業機械の作業支援システムにおいて、
前記制御装置は、前記掘削対象の安定角に基づいて前記上面の上に前記作業機械の他の作業位置をさらに算出し、
前記表示装置は、前記作業位置と前記他の作業位置のうち前記基準点からの距離が大きいほうに関する情報を表示することを特徴とする作業機械の作業支援システム。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129815A JP6522441B2 (ja) | 2015-06-29 | 2015-06-29 | 作業機械の作業支援システム |
| EP16817857.2A EP3315671A4 (en) | 2015-06-29 | 2016-06-27 | WORK-AID SYSTEM FOR WORK MACHINES |
| CN201680038340.0A CN107709673B (zh) | 2015-06-29 | 2016-06-27 | 作业机械的作业支援系统 |
| AU2016288150A AU2016288150B2 (en) | 2015-06-29 | 2016-06-27 | Work assist system for work machines |
| CA2989984A CA2989984C (en) | 2015-06-29 | 2016-06-27 | Work assist system for work machine |
| US15/737,859 US11008732B2 (en) | 2015-06-29 | 2016-06-27 | Work assist system for work machine |
| KR1020177037637A KR102025124B1 (ko) | 2015-06-29 | 2016-06-27 | 작업 기계의 작업 지원 시스템 |
| PCT/JP2016/068975 WO2017002749A1 (ja) | 2015-06-29 | 2016-06-27 | 作業機械の作業支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129815A JP6522441B2 (ja) | 2015-06-29 | 2015-06-29 | 作業機械の作業支援システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017014726A JP2017014726A (ja) | 2017-01-19 |
| JP2017014726A5 JP2017014726A5 (ja) | 2018-08-09 |
| JP6522441B2 true JP6522441B2 (ja) | 2019-05-29 |
Family
ID=57608629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015129815A Active JP6522441B2 (ja) | 2015-06-29 | 2015-06-29 | 作業機械の作業支援システム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11008732B2 (ja) |
| EP (1) | EP3315671A4 (ja) |
| JP (1) | JP6522441B2 (ja) |
| KR (1) | KR102025124B1 (ja) |
| CN (1) | CN107709673B (ja) |
| AU (1) | AU2016288150B2 (ja) |
| CA (1) | CA2989984C (ja) |
| WO (1) | WO2017002749A1 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6480830B2 (ja) * | 2015-08-24 | 2019-03-13 | 株式会社小松製作所 | ホイールローダの制御システム、その制御方法およびホイールローダの制御方法 |
| WO2017170555A1 (ja) * | 2016-03-31 | 2017-10-05 | 住友重機械工業株式会社 | ショベル |
| WO2018151280A1 (ja) * | 2017-02-17 | 2018-08-23 | 住友重機械工業株式会社 | 作業機械用周辺監視システム |
| JP6963007B2 (ja) * | 2017-03-31 | 2021-11-05 | 住友建機株式会社 | ショベル、ショベルの表示装置及びショベルにおける画像の表示方法 |
| WO2019026802A1 (ja) * | 2017-07-31 | 2019-02-07 | 住友重機械工業株式会社 | ショベル |
| US20200217050A1 (en) | 2017-09-06 | 2020-07-09 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| KR20190031503A (ko) * | 2017-09-08 | 2019-03-26 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 작업 기계의 표시 제어 장치, 작업 기계, 작업 기계의 표시 제어 방법 |
| EP3779067A4 (en) * | 2018-03-27 | 2021-04-07 | Sumitomo Heavy Industries, Ltd. | EXCAVATOR |
| JP6841784B2 (ja) * | 2018-03-28 | 2021-03-10 | 日立建機株式会社 | 作業機械 |
| WO2019187192A1 (ja) * | 2018-03-29 | 2019-10-03 | 株式会社小松製作所 | 作業機械の制御システム、方法、及び作業機械 |
| JP7014007B2 (ja) * | 2018-03-29 | 2022-02-01 | コベルコ建機株式会社 | 作業機械の遠隔操作システム |
| JP7154026B2 (ja) * | 2018-03-30 | 2022-10-17 | 株式会社小松製作所 | 作業機械の制御装置、掘削機械の制御装置、及び作業機械の制御方法 |
| EP3812517A4 (en) * | 2018-06-19 | 2021-09-15 | Sumitomo (S.H.I.) Construction Machinery Co., Ltd. | EXCAVATOR AND INFORMATION PROCESSING DEVICE |
| JP7188941B2 (ja) * | 2018-08-31 | 2022-12-13 | 株式会社小松製作所 | 作業機械の制御装置および制御方法 |
| JP7088792B2 (ja) | 2018-09-12 | 2022-06-21 | 株式会社小松製作所 | 作業機械、制御装置、および制御方法 |
| EP3670761B1 (en) | 2018-12-21 | 2021-10-20 | Hiab AB | A vehicle provided with a control system, and a method for the vehicle |
| JP7318414B2 (ja) * | 2019-08-21 | 2023-08-01 | コベルコ建機株式会社 | 作業機械 |
| KR102647539B1 (ko) * | 2020-03-25 | 2024-03-15 | 히다찌 겐끼 가부시키가이샤 | 작업 기계의 운전 지원 시스템 |
| IT202000016444A1 (it) * | 2020-07-07 | 2022-01-07 | Cnh Ind Italia Spa | Sistema di ausilio alla regolazione di un’orientazione di un utensile e veicolo da lavoro comprendente il sistema |
| JP7472751B2 (ja) * | 2020-10-02 | 2024-04-23 | コベルコ建機株式会社 | 掘削位置決定システム |
| EP4267807A1 (en) * | 2020-12-28 | 2023-11-01 | Volvo Autonomous Solutions AB | Method and device for controlling excavator |
| JPWO2022196530A1 (ja) * | 2021-03-16 | 2022-09-22 | ||
| WO2023090070A1 (ja) * | 2021-11-19 | 2023-05-25 | 日本精機株式会社 | 作業支援システム、作業支援システムの制御方法、作業支援システムの制御プログラム |
| JP7342294B1 (ja) * | 2023-03-23 | 2023-09-11 | オリエンタル白石株式会社 | ケーソン点群抽出システム及びプログラム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS522667B2 (ja) | 1973-05-22 | 1977-01-22 | ||
| JPS522667A (en) | 1975-06-24 | 1977-01-10 | Chiyaseizanen Yuugen | Gauze teabag with string |
| JPH10212740A (ja) * | 1997-01-30 | 1998-08-11 | Komatsu Ltd | 油圧ショベルの自動掘削方法 |
| US6076029A (en) * | 1997-02-13 | 2000-06-13 | Hitachi Construction Machinery Co., Ltd. | Slope excavation controller of hydraulic shovel, target slope setting device and slope excavation forming method |
| US6108949A (en) * | 1997-12-19 | 2000-08-29 | Carnegie Mellon University | Method and apparatus for determining an excavation strategy |
| JP2000291076A (ja) * | 1999-04-01 | 2000-10-17 | Tokai Rika Co Ltd | パワーショベル |
| JP3703820B2 (ja) * | 2003-08-22 | 2005-10-05 | 有限会社しげの | 下水道管の設置用開削工法および下水道管の設置用開削装置 |
| JP2011043002A (ja) * | 2009-08-24 | 2011-03-03 | Naomasa Nitta | 掘削支援装置 |
| CH705152B1 (de) * | 2010-02-23 | 2017-05-15 | Israel Aerospace Ind Ltd | System und Verfahren für den autonomen Betrieb einer Multitask-Erdbaumaschine. |
| JP5143858B2 (ja) * | 2010-04-20 | 2013-02-13 | 住友重機械工業株式会社 | 建設機械 |
| JP5202667B2 (ja) * | 2011-02-22 | 2013-06-05 | 株式会社小松製作所 | 油圧ショベルの位置誘導システム及びその制御方法 |
| JP5597222B2 (ja) * | 2012-04-11 | 2014-10-01 | 株式会社小松製作所 | 油圧ショベルの掘削制御システム |
| US8965642B2 (en) * | 2012-10-05 | 2015-02-24 | Komatsu Ltd. | Display system of excavating machine and excavating machine |
| US8924094B2 (en) * | 2012-10-17 | 2014-12-30 | Caterpillar Inc. | System for work cycle detection |
| US9428885B2 (en) * | 2014-09-15 | 2016-08-30 | Trimble Navigation Limited | Guidance system for earthmoving machinery |
-
2015
- 2015-06-29 JP JP2015129815A patent/JP6522441B2/ja active Active
-
2016
- 2016-06-27 CA CA2989984A patent/CA2989984C/en active Active
- 2016-06-27 CN CN201680038340.0A patent/CN107709673B/zh active Active
- 2016-06-27 AU AU2016288150A patent/AU2016288150B2/en active Active
- 2016-06-27 WO PCT/JP2016/068975 patent/WO2017002749A1/ja active Application Filing
- 2016-06-27 EP EP16817857.2A patent/EP3315671A4/en active Pending
- 2016-06-27 US US15/737,859 patent/US11008732B2/en active Active
- 2016-06-27 KR KR1020177037637A patent/KR102025124B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017014726A (ja) | 2017-01-19 |
| KR102025124B1 (ko) | 2019-09-25 |
| EP3315671A4 (en) | 2019-01-30 |
| CN107709673A (zh) | 2018-02-16 |
| AU2016288150B2 (en) | 2019-12-05 |
| CN107709673B (zh) | 2020-02-21 |
| KR20180014767A (ko) | 2018-02-09 |
| AU2016288150A1 (en) | 2018-01-18 |
| WO2017002749A1 (ja) | 2017-01-05 |
| CA2989984C (en) | 2020-11-03 |
| US20190003152A1 (en) | 2019-01-03 |
| EP3315671A1 (en) | 2018-05-02 |
| US11008732B2 (en) | 2021-05-18 |
| CA2989984A1 (en) | 2017-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6522441B2 (ja) | 作業機械の作業支援システム | |
| JP7408761B2 (ja) | 作業機械の制御装置および制御方法 | |
| JP6550358B2 (ja) | 建設機械の施工時間予測システム | |
| JP6450008B2 (ja) | 作業機制御装置および作業機械 | |
| JP6259170B2 (ja) | 作業機制御装置および作業機械 | |
| KR102166900B1 (ko) | 작업기 제어 장치 및 작업 기계 | |
| JP2018090989A (ja) | 作業機制御装置および作業機械 | |
| JP2021085216A (ja) | 作業機械の制御システム、作業機械、作業機械の制御方法 | |
| JP7147389B2 (ja) | 作業機械 | |
| JP6894464B2 (ja) | 作業機械、作業機械の制御方法、施工管理装置および施工管理装置の制御方法 | |
| JP7324100B2 (ja) | 作業機械 | |
| JP7263287B2 (ja) | 作業機械 | |
| AU2023202519A1 (en) | A work machine with an adaptive control system and method for grade control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180627 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190424 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6522441 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |