JP6516618B2 - 回転電機 - Google Patents
回転電機 Download PDFInfo
- Publication number
- JP6516618B2 JP6516618B2 JP2015150311A JP2015150311A JP6516618B2 JP 6516618 B2 JP6516618 B2 JP 6516618B2 JP 2015150311 A JP2015150311 A JP 2015150311A JP 2015150311 A JP2015150311 A JP 2015150311A JP 6516618 B2 JP6516618 B2 JP 6516618B2
- Authority
- JP
- Japan
- Prior art keywords
- holder
- bearing
- shaft
- axial direction
- inner ring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000004907 flux Effects 0.000 claims description 6
- 230000002093 peripheral effect Effects 0.000 description 34
- 239000000853 adhesive Substances 0.000 description 5
- 230000001070 adhesive effect Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000001105 regulatory effect Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000000428 dust Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910000963 austenitic stainless steel Inorganic materials 0.000 description 2
- 239000013256 coordination polymer Substances 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000003566 sealing material Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images


Landscapes
- Motor Or Generator Frames (AREA)
Description
特許文献1は、外輪が保持部の軸受収容部に嵌合されると共に、内輪が回転軸に遊嵌されるボールベアリングを備えるものである。特許文献1では、センサマグネットの内輪保持部とティースワッシャとによって、内輪の回り止めを行うようになっている。
特許文献2は、回転軸の一端部にセンサマグネットを保持するホルダが設けられると共に、センサマグネットから見て回転軸の一端部とは反対側にセンサマグネットと対向して設けられる磁気センサとを備えるものである。
一方、ベアリングの内輪及び外輪の両方を圧入固定する構造が知られている。
特許文献1においては、外輪を嵌合し且つ内輪を遊嵌する構造(外輪を圧入とし内輪を挿入とする構造)であるため、内輪及び外輪の両方を圧入固定する構造と比較して、ベアリングの長寿命化を図ることはできるが、内輪の回り止め用の新たな部材が必要となるため、部品点数が増加し、部品コストを低減する上で課題があった。
特許文献2においては、回転軸の一端部にホルダを介してセンサマグネットを固定する構造であるため、内輪が回転軸に対し固定されていない場合、内輪と回転軸との間に生じる隙間により、内輪と回転軸との一体回転が阻害され、内輪と回転軸との間で摩擦が生じてしまい、内輪内周面が摩耗等しやすくなるため、ベアリングの長寿命化を図る上で課題があった。
又、前記隙間により、回転軸が径方向に動くことでセンサマグネットの位置が磁気センサに対してずれやすくなり、磁気センサの検出精度が損なわれてしまう虞があった。磁気センサの検出精度を保つためには、磁気センサの位置をセンサマグネットのずれに合わせて調整する方法があるが、磁気センサの調整工程が増加し、組付工数がかかるため、組付コストを低減する上で課題があった。
請求項2に記載した発明は、前記回転軸は、前記軸線方向に延びる軸部と、前記軸部と一体に形成されると共に、前記軸部よりも径方向外側に拡径して前記ベアリング位置規制部として機能する拡径部と、を備えることを特徴とする。
請求項3に記載した発明は、前記筒部の基端部は、前記ホルダ固定部として機能することを特徴とする。
請求項4に記載した発明は、前記ホルダは、前記筒部の先端部と前記環状突起とにより形成され、前記センサマグネットを収容するセンサマグネット収容部を備え、前記磁気センサは、前記センサマグネットと前記軸線方向において間隔をあけて対向配置されることを特徴とする。
請求項5に記載した発明は、前記ホルダ固定部は、前記回転軸の一端部に圧入固定されることを特徴とする。
請求項6に記載した発明は、前記ホルダ固定部は、前記回転軸の一端部に着脱可能に固定されることを特徴とする。
請求項2に記載した発明によれば、回転軸が、軸線方向に延びる軸部と、軸部と一体に形成されると共に軸部よりも径方向外側に拡径してベアリング位置規制部として機能する拡径部とを備えることで、ベアリング位置規制部を別個に設ける必要はないため、部品点数が増加することはなく、部品コストを低減することができる。
請求項3に記載した発明によれば、筒部の基端部が、ホルダ固定部として機能することで、簡素な構成で回転軸の一端部にホルダを固定することができる。
請求項5に記載した発明によれば、ホルダ固定部が、回転軸の一端部に圧入固定されることで、簡素な構成で回転軸に対するホルダの位置を規制することができる。又、ホルダ固定部と回転軸の一端部との間に隙間が生じないようにすることができるため、塵埃及び水等が内部に入り込むことを抑制することができる。
請求項6に記載した発明によれば、ホルダ固定部が、回転軸の一端部に着脱可能に固定されることで、ホルダ固定部を回転軸の一端部から容易に離脱することができ、メンテナンス性を向上させることができる。又、回転軸の一端部へのホルダ固定部の取付時には、ホルダ固定部と回転軸の一端部との間に隙間が生じないようにすることができるため、塵埃及び水等が内部に入り込むことを抑制することができる。
以下、本発明の第一実施形態について図面を参照して説明する。
<回転電機全体>
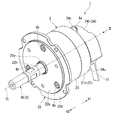
図1〜図3は、第一実施形態に係る回転電機1の一例を示す。例えば、回転電機1は、工場のライン設備等の産業用ロボットに用いられる。
回転電機1は、ケース体2と、ケース体2に対して回転自在とされるロータ3と、ロータ3を回転させるための磁界を発生可能なステータ4とを備える。回転電機1は、ステータ4の内側に回転自在に設けられたロータ3を有するいわゆるインナーロータ型のブラシレスモータである。
又、図中符号V1はロータ軸方向の一方側、符号V2はロータ軸方向の他方側をそれぞれ示す。
図1及び図3を併せて参照し、ケース体2は、ステータ4におけるロータ軸方向の一方側V1を覆う第一ブラケット21と、ステータ4におけるロータ軸方向の他方側V2を覆う第二ブラケット22と、ステータ4におけるロータ径方向外側を覆う円筒状のステータケース23と、磁気センサ7を覆う磁気センサカバー24とを備える。
内周壁21cは、第一ブラケット21のうち、後述する外輪8bが圧入される部分である。
環状凸部21dには、回転軸30と同軸をなしてロータ軸方向に開口する開口部21hが形成される。開口部21hの直径は、ホルダ5の外径よりも大きい。
を備える。
図3を参照し、ロータ3は、軸線CLを形成する回転軸30と、回転軸30の径方向外側に設けられる円筒状のマグネットリング35(駆動マグネット)とを備える。ロータ3は、ステータ4が発生する磁界を受けて回転可能とされる。ロータ3は、第一ベアリング8及び第二ベアリング9を介してケース体2に回転自在に支持される。
回転軸30は、ロータ軸方向に延びる軸部31と、軸部31よりも径方向外側に拡径する第一拡径部32と、第一拡径部32のロータ軸方向の他方側V2の部分に隣接すると共に第一拡径部32よりも径方向外側に拡径する第二拡径部33と、第二拡径部33のロータ軸方向の他方側V2の部分に隣接すると共に第一拡径部32よりも径方向外側に拡径し且つ第二拡径部33よりも径方向内側に縮径する第三拡径部34とを備える。各拡径部32,33,34は、軸部31と一体に形成される。ここで、第一拡径部32は、請求項に記載の「拡径部」に相当する。
軸部31(具体的には軸部31のうち第一拡径部32よりもロータ軸方向の一方側V1の部分)は、回転軸30のうち、後述する内輪8aが挿入される部分である。
第一拡径部32は、第一ベアリング8の内輪8aのロータ軸方向における位置を規制するベアリング位置規制部32aを有する。ベアリング位置規制部32aは、第一拡径部32のロータ軸方向の一方側V1の部分であり、第一ベアリング8の内輪8aのロータ軸方向の他方側V2の端部に当接する。ベアリング位置規制部32aは、後述する内輪8aのロータ軸方向における位置を規制する。
第三拡径部34のロータ軸方向の他方側V2の部分は、第二ベアリング9の内輪のロータ軸方向の一方側V1の端部に当接する。
第一ベアリング8は、内輪8a及び外輪8bを備える。第一ベアリング8の内輪8aは、回転軸30の軸部31に挿入される。第一ベアリング8の外輪8bは、第一ブラケット21の内周壁21cに圧入される。本実施形態では、内輪8aを挿入とし且つ外輪8bを圧入とする。
外輪8bのロータ軸方向の一方側V1の端部は、環状凸部21dのロータ軸方向の他方側V2の部分に当接する。
ステータ4は、ロータ3のマグネットリング35とロータ径方向外側に間隔を空けて配置される。図1及び図3を併せて参照し、ステータ4は、ボルト4a及びナット4bによってケース体2に固定される。例えば、磁気センサカバー24の各フランジ部24c、第一ブラケット21の本体部21a及び第二ブラケット22の本体部22aのそれぞれに形成される不図示の挿通孔に長尺のボルト4aを挿通し、挿通したボルト4aの突出端を第二ブラケット22の本体部22aの凹部内のナット4bに螺着することで、ステータ4をケース体2に固定することができる。
図3を参照し、ホルダ5は、回転軸30と同軸の円筒状をなして回転軸30の一端部30aを囲む筒部50と、筒部50のロータ軸方向中央部から径方向内側に突出すると共に回転軸30と同軸の円環状をなす環状突起51とを備える。回転軸30の一端部30aは、環状突起51と離反する。ロータ軸方向において、回転軸30の一端部30aと環状突起51との間には、空隙部51sが形成される。尚、環状突起51の形状は円環状に限らず、環状突起51の一部に切欠きが形成されていてもよい。
筒部50の基端部50a(ロータ軸方向の他方側V2の端部)は、回転軸30の一端部30aにホルダ5を固定するホルダ固定部50gを有する。ホルダ固定部50gは、筒部50の基端部50aの内周部であり、回転軸30の一端部30aの外周部に当接する。
例えば、ホルダ5の形成材料は、非磁性を有し、且つ回転軸30(例えば鉄材)と熱膨張率の差が小さい、SUS303、SUS304及びSUS316等のオーステナイト系ステンレスを用いる。これにより、ホルダ5の圧入固定時の応力を許容すると共に、高温時における回転軸30とホルダ固定部50gとの締め代を確保することができる。尚、このような効果を奏することができれば、ホルダ5の形成材料は、上記のオーステナイト系ステンレスに限らず、他のステンレス、アルミニウム及び真鍮等を用いてもよい。
筒部50の基端部50aは、第一ベアリング8を固定するベアリング固定部50tを有する。ベアリング固定部50tは、筒部50の基端部50aのロータ軸方向の他方側V2の部分であり、第一ベアリング8の内輪8aのロータ軸方向の一方側V1の端部に当接する。ベアリング固定部50tは、ベアリング位置規制部32aと共に、内輪8aをロータ軸方向で挟持して第一ベアリング8を固定する。
筒部50の先端部50b(ロータ軸方向の一方側V1の端部)は、センサマグネット6を囲む。環状突起51の一面51f(ロータ軸方向の一方側V1の面)には、センサマグネット6が載置される。ホルダ5における筒部50の先端部50b及び環状突起51は、センサマグネット6を収容するセンサマグネット収容部52を形成する。
センサマグネット6は、回転軸30と同軸の円盤状をなす。例えば、センサマグネット6の組付け手順は、ホルダ5を回転軸30の一端部30aに固定した後に、センサマグネット6をセンサマグネット収容部52に収容する手順で行う。センサマグネット6は、筒部50の先端部50bに圧入固定される。これにより、センサマグネット6は、ホルダ5と共にロータ3と一体回転可能に固定される。
磁気センサ7は、センサマグネット6とロータ軸方向において間隔を空けて対向配置される。磁気センサ7は、磁気センサカバー24の内側の空間24s(天板24aと外周壁24bとによって囲まれる空間)に配置される円盤状の回路基板70の径方向中央部に設けられる。回路基板70は、ハーネス71等を介して不図示の外部電源に接続されている。
以下、本発明の第二実施形態について図面を参照して説明する。
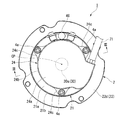
図4は、第二実施形態に係る回転電機の要部拡大図であり、図3の第一ベアリング8周辺部に相当する断面図である。
第二実施形態では、第一実施形態に対して、ホルダ固定部251aが回転軸230の一端部230aに着脱自在に固定される点で特に異なる。図4において、第一実施形態と同様の構成には同一符号を付し、その詳細な説明は省略する。
回転軸230は、上述の軸部31、第一拡径部32、第二拡径部33及び第三拡径部34と、軸部31の一端部30aに隣接すると共に軸部31よりも径方向内側に縮径する縮径部231とを備える。縮径部231は、各拡径部32,33,34と共に軸部31と一体に形成される。尚、図4においては、第二拡径部33及び第三拡径部34の図示を省略する。
ホルダ205は、回転軸230と同軸の円筒状をなして回転軸230の一端部230aを囲む筒部250と、筒部250のロータ軸方向中央部から径方向内側に突出すると共に回転軸230と同軸の円筒状をなす雌ネジ形成部251とを備える。
回転軸230の一端部230aは、センサマグネット6と離反する。ロータ軸方向において、回転軸230の一端部230aとセンサマグネット6との間には、空隙部251sが形成される。
筒部250の雌ネジ形成部251は、回転軸230の一端部230aにホルダ205を着脱可能に固定するホルダ固定部251aを有する。ホルダ固定部251aは、筒部250の雌ネジ形成部251の内周部であり、ネジ加工により、螺旋状の溝が形成されている。ホルダ固定部251aは、雌ネジ部として機能し、回転軸230の雄ネジ部231aに螺着固定される。これにより、ホルダ205は、ロータ203と一体回転可能に固定される。
筒部250の基端部250aは、第一ベアリング8を固定するベアリング固定部250tを有する。ベアリング固定部250tは、筒部250の基端部250aのロータ軸方向の他方側V2の部分であり、第一ベアリング8の内輪8aのロータ軸方向の一方側V1の端部に当接する。ベアリング固定部250tは、ベアリング位置規制部32aと共に、内輪8aをロータ軸方向で挟持して第一ベアリング8を固定する。
筒部250の先端部250b(ロータ軸方向の一方側V1の端部)は、センサマグネット6を囲む。雌ネジ形成部251の一面251f(ロータ軸方向の一方側V1の面)には、センサマグネット6が載置される。ホルダ205における筒部250の先端部250b及び雌ネジ形成部251は、センサマグネット6を収容するセンサマグネット収容部252を形成する。
2 ケース体
5 ホルダ
6 センサマグネット
7 磁気センサ
8 第一ベアリング(ベアリング)
8a 内輪
8b 外輪
30,230 回転軸
31 軸部
32 第一拡径部(拡径部)
32a ベアリング位置規制部
50 筒部
50g ホルダ固定部
50t,250t ベアリング固定部
51 環状突起
51s 空隙部
251a ホルダ固定部
CL ロータ軸方向(軸線方向)
Claims (6)
- ケース体と、
前記ケース体に対して回転自在とされる回転軸と、
前記回転軸の軸線方向の一端部に設けられるホルダと、
前記ホルダに設けられるセンサマグネットと、
前記センサマグネットの磁束を検出する磁気センサと、
前記回転軸に挿入される内輪及び前記ケース体に圧入される外輪を有するベアリングと、を備える回転電機において、
前記ホルダは、前記回転軸と同軸の円筒状をなして前記回転軸の外周を囲む筒部と、前記筒部から径方向内側に突出すると共に、前記回転軸と同軸の環状をなす環状突起と、を備え、
前記回転軸に、前記内輪の前記軸線方向における位置を規制するベアリング位置規制部を設け、
前記ホルダに、前記ベアリング位置規制部と共に前記内輪を前記軸線方向で挟持して前記ベアリングを固定するベアリング固定部と、前記回転軸の一端部に固定されるホルダ固定部とを設け、
前記筒部の基端部は、前記ベアリング固定部として機能し、
前記軸線方向において、前記回転軸の一端部と前記環状突起との間には、空隙部が形成されていることを特徴とする回転電機。 - 前記回転軸は、
前記軸線方向に延びる軸部と、
前記軸部と一体に形成されると共に、前記軸部よりも径方向外側に拡径して前記ベアリング位置規制部として機能する拡径部と、を備えることを特徴とする請求項1に記載の回転電機。 - 前記筒部の基端部は、前記ホルダ固定部として機能することを特徴とする請求項1又は2に記載の回転電機。
- 前記ホルダは、前記筒部の先端部と前記環状突起とにより形成され、前記センサマグネットを収容するセンサマグネット収容部を備え、
前記磁気センサは、前記センサマグネットと前記軸線方向において間隔をあけて対向配置されることを特徴とする請求項1から3の何れか一項に記載の回転電機。 - 前記ホルダ固定部は、前記回転軸の一端部に圧入固定されることを特徴とする請求項1から4の何れか一項に記載の回転電機。
- 前記ホルダ固定部は、前記回転軸の一端部に着脱可能に固定されることを特徴とする請求項1から5の何れか一項に記載の回転電機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015150311A JP6516618B2 (ja) | 2015-07-30 | 2015-07-30 | 回転電機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015150311A JP6516618B2 (ja) | 2015-07-30 | 2015-07-30 | 回転電機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017034779A JP2017034779A (ja) | 2017-02-09 |
| JP6516618B2 true JP6516618B2 (ja) | 2019-05-22 |
Family
ID=57986409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015150311A Expired - Fee Related JP6516618B2 (ja) | 2015-07-30 | 2015-07-30 | 回転電機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6516618B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6935253B2 (ja) * | 2017-07-10 | 2021-09-15 | ミネベアミツミ株式会社 | モータ |
| KR102656561B1 (ko) * | 2018-10-01 | 2024-04-12 | 엘지이노텍 주식회사 | 모터 |
| JP7517927B2 (ja) * | 2020-09-25 | 2024-07-17 | ニデックインスツルメンツ株式会社 | エンコーダおよびモータ |
| DE102022204652A1 (de) * | 2022-05-12 | 2023-11-16 | Robert Bosch Gesellschaft mit beschränkter Haftung | Montagebaugruppe, Verfahren zur Herstellung einer Montagebaugruppe und elektronisch kommutierter Motor mit Montagebaugruppe |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008228367A (ja) * | 2007-03-08 | 2008-09-25 | Mitsuba Corp | ブラシレスモータ |
-
2015
- 2015-07-30 JP JP2015150311A patent/JP6516618B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017034779A (ja) | 2017-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6516618B2 (ja) | 回転電機 | |
| US5982066A (en) | Electric motor | |
| JP2003034279A (ja) | ダイナモ付き自転車ハブ軸 | |
| US9231450B2 (en) | Motor | |
| JP2005140320A5 (ja) | ||
| EP3065273A1 (en) | In-wheel motor and in-wheel motor driving device | |
| TW201535940A (zh) | 馬達構造 | |
| JP2004248492A (ja) | モータ用シール構造、モータ、及び自動車の自動変速機用モータ | |
| US20210384796A1 (en) | Motor | |
| JPH04229046A (ja) | 回転子シフト式電動機 | |
| US20190149012A1 (en) | Direct-drive electric motor arrangement | |
| JP2007202240A (ja) | モータ | |
| JP7346107B2 (ja) | 軸受装置及びスピンドル装置 | |
| JP2017028802A (ja) | 電動モータ | |
| JP2007110791A (ja) | 軸受機構およびモータ | |
| JP2010022168A (ja) | ファンモータ | |
| WO2019111430A1 (ja) | 電動機及び電動送風機 | |
| JP2008228367A (ja) | ブラシレスモータ | |
| KR100946480B1 (ko) | 회전축의 베어링 체결장치 | |
| JP4123253B2 (ja) | ブラシレスオルタネータ | |
| EP3457540A1 (en) | Drive device | |
| JP2008271644A (ja) | 発電装置付車輪用軸受 | |
| JP6676901B2 (ja) | 軸受−センサ取付構造 | |
| JP2000345993A (ja) | 送風機 | |
| CN110832754A (zh) | 用于机动车辆刮擦系统的齿轮马达 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180124 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190416 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6516618 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |