JP6516129B2 - 外科的開創器 - Google Patents
外科的開創器 Download PDFInfo
- Publication number
- JP6516129B2 JP6516129B2 JP2016500461A JP2016500461A JP6516129B2 JP 6516129 B2 JP6516129 B2 JP 6516129B2 JP 2016500461 A JP2016500461 A JP 2016500461A JP 2016500461 A JP2016500461 A JP 2016500461A JP 6516129 B2 JP6516129 B2 JP 6516129B2
- Authority
- JP
- Japan
- Prior art keywords
- retractor
- illumination source
- sensor
- tissue
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0206—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors with antagonistic arms as supports for retractor elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0684—Endoscope light sources using light emitting diodes [LED]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/07—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements using light-conductive means, e.g. optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/32—Devices for opening or enlarging the visual field, e.g. of a tube of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/025—Joint distractors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/01—Measuring temperature of body parts ; Diagnostic temperature sensing, e.g. for malignant or inflamed tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14542—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring blood gases
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/746—Alarms related to a physiological condition, e.g. details of setting alarm thresholds or avoiding false alarms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0293—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors with ring member to support retractor elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00084—Temperature
- A61B2017/00092—Temperature using thermocouples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00473—Distal part, e.g. tip or head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00946—Material properties malleable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
- A61B2017/0225—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery flexible, e.g. fabrics, meshes, or membranes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/025—Joint distractors
- A61B2017/0256—Joint distractors for the spine
- A61B2017/0262—Joint distractors for the spine with a provision for protecting nerves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/309—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using white LEDs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14503—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue invasive, e.g. introduced into the body by a catheter or needle or using implanted sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14539—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring pH
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14546—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring analytes not otherwise provided for, e.g. ions, cytochromes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
Description
(1) 身体内の奥深いアクセス入口の中に埋め込まれた神経組織を含む筋繊維を外科的に開創する(retracting)ための外科的装置であって、
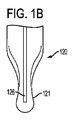
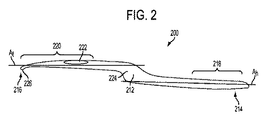
ハンドル部分を含む近位端、及び身体内の組織を、前記組織のかなりの分断なしに操作するように構成される尖っていない開創先端具を有する遠位端を有する細長い開創器シャフトと、
前記細長い開創器シャフト上に配置され、かつ組織を照明するように構成される照明源と、
前記ハンドルに連結され、かつ前記照明源に動作可能に連結されるコネクタと、を備える、装置。
(2) 前記開創先端具の上に配置され、かつ前記開創先端具によって操作される組織の少なくとも1つの生理学的パラメータを感知するように構成されるセンサーを更に備える、実施態様1に記載の装置。
(3) 前記コネクタが、前記センサーに電気的に連結され、かつ前記センサーと外部の信号処理装置との間で信号を伝達するように構成される、実施態様2に記載の装置。
(4) 前記ハンドル部分内に配置され、かつ前記照明源及び前記センサーのうちの少なくとも1つに電力を提供するように構成される内部電源を更に備える、実施態様2に記載の装置。
(5) 前記尖っていない開創先端具が、骨表面に適合するように構成される凹面を有する、実施態様1に記載の装置。
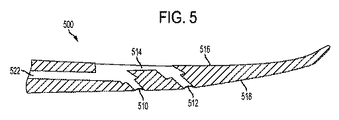
(7) 前記細長い開創器シャフトが、少なくともその一部分を通って延在する管腔を有する、実施態様1に記載の装置。
(8) 前記コネクタが、前記管腔を通って延在する、実施態様7に記載の装置。
(9) 前記照明源が、少なくとも部分的に前記管腔内に配置される、実施態様7に記載の装置。
(10) 前記細長い開創器シャフトが、少なくともその一部分を通って延在する管腔を有し、かつ前記センサーが、少なくとも部分的に前記管腔内に配置される、実施態様2に記載の装置。
(12) 前記照明源が、光ファイバー照明システムを含む、実施態様1に記載の装置。
(13) 前記照明源が、発光ダイオードを含む、実施態様1に記載の装置。
(14) 前記尖っていない開創先端具が骨内に係止されるように構成される、実施態様1に記載の装置。
(15) 前記コネクタが、機械的な固定手段として作用する、実施態様1に記載の装置。
(17) 前記ハンドル部分内に配置され、かつ前記コネクタに連結される信号処理装置を更に備え、前記信号処理装置が、前記少なくとも1つの生理学的パラメータを監視し、前記パラメータが予め設定した範囲の外側であるとき、ユーザに連絡するように構成される、実施態様2に記載の装置。
(18) 前記細長い開創シャフトの少なくとも一部分が可鍛性である、実施態様1に記載の装置。
(19) 前記センサーが、前記細長い開創器シャフトの外面に積層される、実施態様2に記載の装置。
(20) 身体内の組織を開創するための外科的システムであって、
ハンドルと、
前記ハンドルから遠位に延在する細長いシャフトと、
前記細長いシャフトの遠位端に連結される支持リングと、
前記支持リングに取り外し可能に嵌合され、かつ組織を開創するように構成される複数のブレードと、
前記細長いシャフト及び前記支持リングのうちの少なくとも1つの上に配置され、かつ組織を照明するように構成される照明源と、を備える、システム。
(22) 前記複数のブレードが、前記支持リング上にスナップ嵌めされるように構成される、実施態様20に記載のシステム。
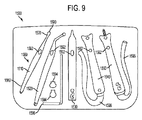
(23) 外科用キットであって、
近位端と、遠位端と、前記遠位端の周囲の区域を照明するための照明源と、を有する少なくとも1つの開創器であって、前記遠位端が、尖っていない切開先端具と、身体組織の少なくとも1つの生理学的パラメータを監視するための、前記尖っていない切開先端具の上に配置されるセンサーとを有する、開創器と、
前記少なくとも1つの開創器の前記尖っていない切開先端具の上に配置されるように構成される少なくとも1つのモジュール式の先端具と、
前記開創器が身体内に配置されるときに、前記開創器の前記近位端において前記開創器を支持するように構成される少なくとも1つの支持リングと、を備える、キット。
Claims (17)
- 身体内の奥深いアクセス入口の中に埋め込まれた神経組織を含む筋繊維を外科的に開創するための外科的装置であって、
ハンドル部分を含む近位端、及び身体内の組織を、前記組織のかなりの分断なしに操作するように構成される尖っていない開創先端具を有する遠位端を有する細長い開創器シャフトと、
前記細長い開創器シャフト上に配置され、かつ組織を照明するように構成される照明源と、
前記ハンドル部分に連結され、かつ前記照明源に動作可能に連結されるコネクタと、
前記開創先端具の上に配置され、かつ前記開創先端具によって操作される組織の少なくとも1つの生理学的パラメータを感知するように構成されるセンサーと、
信号処理装置と、
電源であって、電力が、前記電源から供給され、かつ前記信号処理装置へと供給され、前記信号処理装置が、前記コネクタを通じて、前記センサー及び前記照明源のうちの少なくとも1つに電力を供給する、電源と、を備え、
前記センサーによって監視されているパラメータが、予め設定した範囲外であるとき、前記信号処理装置が、前記照明源を起動させてユーザに警報を発するように構成され、
前記照明源、前記コネクタ、前記信号処理装置、及び前記電源がすべて、前記細長い開創器シャフト内に配置されている、外科的装置。 - 前記電源が、前記ハンドル部分内に配置されている、請求項1に記載の外科的装置。
- 前記尖っていない開創先端具が、骨表面に適合するように構成される凹面を有する、請求項1に記載の外科的装置。
- 前記細長い開創器シャフトが、前記細長い開創器シャフトに形成される少なくとも1つの屈曲部を有して非直線的であり、これにより、前記尖っていない開創先端具が、前記ハンドル部分の中心長手方向軸を横断する中心長手方向軸に沿って延在する、請求項1に記載の外科的装置。
- 前記細長い開創器シャフトが、少なくともその一部分を通って延在する管腔を有する、請求項1に記載の外科的装置。
- 前記コネクタが、前記管腔を通って延在する、請求項5に記載の外科的装置。
- 前記照明源が、少なくとも部分的に前記管腔内に配置される、請求項5に記載の外科的装置。
- 前記細長い開創器シャフトが、少なくともその一部分を通って延在する管腔を有し、かつ前記センサーが、少なくとも部分的に前記管腔内に配置される、請求項1に記載の外科的装置。
- 前記照明源が、前記開創先端具に近接して近位に配置される、請求項1に記載の外科的装置。
- 前記照明源が、光ファイバー照明システムを含む、請求項1に記載の外科的装置。
- 前記照明源が、発光ダイオードを含む、請求項1に記載の外科的装置。
- 前記尖っていない開創先端具が骨内に係止されるように構成される、請求項1に記載の外科的装置。
- 前記センサーが、温度、圧力、血中酸素濃度、神経伝導度、又はこれらの組合せから成る群から選択される少なくとも1つの生理学的パラメータを感知するように構成される、請求項1に記載の外科的装置。
- 前記細長い開創シャフトの少なくとも一部分が可鍛性である、請求項1に記載の外科的装置。
- 前記センサーが、前記細長い開創器シャフトの外面に積層される、請求項1に記載の外科的装置。
- 外科用キットであって、
近位端と、遠位端と、前記遠位端の周囲の区域を照明するための照明源と、を有する少なくとも1つの開創器であって、前記遠位端が、尖っていない切開先端具と、身体組織の少なくとも1つの生理学的パラメータを監視するための、前記尖っていない切開先端具の上に配置されるセンサーとを有し、
前記少なくとも1つの開創器が、信号処理装置及び電源を更に含み、電力が、前記電源から供給され、かつ前記信号処理装置へと供給され、前記信号処理装置が、コネクタを通じて、前記センサー及び前記照明源のうちの少なくとも1つに電力を供給し、
前記照明源、前記コネクタ、前記センサー、前記信号処理装置、及び前記電源がすべて、前記少なくとも1つの開創器内に配置されている、開創器と、
前記少なくとも1つの開創器の前記尖っていない切開先端具の上に配置されるように構成される少なくとも1つのモジュール式の先端具と、
前記開創器が身体内に配置されるときに、前記開創器の前記近位端において前記開創器を支持するように構成される少なくとも1つの支持リングと、を備え、
前記センサーによって監視されているパラメータが、予め設定した範囲外であるとき、前記信号処理装置が、前記照明源を起動させてユーザに警報を発するように構成されている、外科用キット。 - 前記照明源が、色を閃光させる、点滅させる、消す、又は変化させることによって、ユーザに警報を発するように構成されている、請求項1に記載の外科的装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019070372A JP6911071B2 (ja) | 2013-03-15 | 2019-04-02 | 外科的開創器 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/832,727 | 2013-03-15 | ||
| US13/832,727 US9125587B2 (en) | 2013-03-15 | 2013-03-15 | Surgical retractors |
| PCT/US2014/018988 WO2014149493A1 (en) | 2013-03-15 | 2014-02-27 | Surgical retractors |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019070372A Division JP6911071B2 (ja) | 2013-03-15 | 2019-04-02 | 外科的開創器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016521997A JP2016521997A (ja) | 2016-07-28 |
| JP2016521997A5 JP2016521997A5 (ja) | 2017-03-23 |
| JP6516129B2 true JP6516129B2 (ja) | 2019-05-22 |
Family
ID=50390188
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016500461A Active JP6516129B2 (ja) | 2013-03-15 | 2014-02-27 | 外科的開創器 |
| JP2019070372A Active JP6911071B2 (ja) | 2013-03-15 | 2019-04-02 | 外科的開創器 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019070372A Active JP6911071B2 (ja) | 2013-03-15 | 2019-04-02 | 外科的開創器 |
Country Status (6)
| Country | Link |
|---|---|
| US (4) | US9125587B2 (ja) |
| EP (1) | EP3003165B1 (ja) |
| JP (2) | JP6516129B2 (ja) |
| CN (1) | CN105142538A (ja) |
| AU (1) | AU2014238121B2 (ja) |
| WO (1) | WO2014149493A1 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8992558B2 (en) | 2008-12-18 | 2015-03-31 | Osteomed, Llc | Lateral access system for the lumbar spine |
| CN104902803A (zh) * | 2012-11-08 | 2015-09-09 | 奥姆里·埃默迪 | 腔内照明装置 |
| US9125587B2 (en) * | 2013-03-15 | 2015-09-08 | DePuy Synthes Products, Inc. | Surgical retractors |
| CA2910032C (en) | 2013-04-01 | 2022-10-04 | Vinod V. Pathy | Lighting device |
| USD938095S1 (en) | 2013-04-01 | 2021-12-07 | Pathy Medical, Llc | Lighting device |
| CN104323805A (zh) * | 2014-11-30 | 2015-02-04 | 王洛 | 腹腔开合装置 |
| WO2018039228A1 (en) | 2016-08-23 | 2018-03-01 | Stryker European Holdings I, Llc | Instrumentation for the implantation of spinal implants |
| US10213194B2 (en) * | 2016-09-27 | 2019-02-26 | Ethicon, Inc. | Surgical retraction systems including sternal retractors and hemostatic inserts |
| USD846119S1 (en) | 2017-01-24 | 2019-04-16 | Medtronic Advanced Energy Llc | Lighted surgical retractor base |
| WO2018140208A1 (en) | 2017-01-24 | 2018-08-02 | Medtronic Advanced Energy Llc | Modular lighted surgical retractor |
| US10806334B2 (en) * | 2017-02-28 | 2020-10-20 | Verily Life Sciences Llc | System and method for multiclass classification of images using a programmable light source |
| JP7032453B2 (ja) * | 2017-06-15 | 2022-03-08 | デピュイ・シンセス・プロダクツ・インコーポレイテッド | 放射線透過性特徴部を有するsst開創器 |
| EP3668414B1 (en) | 2017-08-17 | 2023-04-05 | Stryker European Operations Holdings LLC | Lateral access bridges, shims and lighting including rod lighting |
| CA3078378A1 (en) * | 2017-10-05 | 2019-04-11 | Dignity Health | Multipurpose medical device |
| US11191532B2 (en) | 2018-03-30 | 2021-12-07 | Stryker European Operations Holdings Llc | Lateral access retractor and core insertion |
| IT201800007489A1 (it) * | 2018-07-25 | 2020-01-25 | Medacta Int Sa | Retrattore |
| US11413029B2 (en) | 2018-10-24 | 2022-08-16 | Stryker European Operations Holdings Llc | Anterior to psoas instrumentation |
| US10925593B2 (en) | 2019-02-12 | 2021-02-23 | Edward Rustamzadeh | Lateral retractor system for minimizing muscle damage in spinal surgery |
| US10624623B1 (en) * | 2019-02-12 | 2020-04-21 | Edward Rustamzadeh | Lateral retractor system for minimizing muscle damage in spinal surgery |
| US10363023B1 (en) | 2019-02-12 | 2019-07-30 | Edward Rustamzadeh | Lateral retractor system for minimizing muscle damage in spinal surgery |
| US20220031298A2 (en) | 2019-02-12 | 2022-02-03 | Edward Rustamzadeh | Lateral retractor system for minimizing muscle damage in spinal surgery |
| US10631842B1 (en) | 2019-02-12 | 2020-04-28 | Edward Rustamzadeh | Lateral retraction system for minimizing muscle damage in spinal surgery |
| US11246582B2 (en) | 2019-02-12 | 2022-02-15 | Edward Rustamzadeh | Dual-motion rotation and retraction system for minimizing muscle damage in spinal surgery |
| WO2021026077A1 (en) * | 2019-08-05 | 2021-02-11 | Zimmer Biomet Spine, Inc. | Smart retractor blade |
| US11564674B2 (en) | 2019-11-27 | 2023-01-31 | K2M, Inc. | Lateral access system and method of use |
| US11523846B2 (en) | 2020-10-09 | 2022-12-13 | Viseon, Inc. | Retractor, distractor, and camera system for cervical procedures |
| US11484300B2 (en) | 2021-03-30 | 2022-11-01 | Jgmg Bengochea, Llc | Tubular retractor securement frame |
| RU205813U1 (ru) * | 2021-04-28 | 2021-08-11 | Федеральное государственное автономное образовательное учреждение высшего образования "Белгородский государственный национальный исследовательский университет" (НИУ "БелГУ") | Ретрактор со светодиодным осветителем на рабочей гибко-упругой части инструмента |
| USD1002842S1 (en) | 2021-06-29 | 2023-10-24 | Edward Rustamzadeh | Combination surgical spinal dilator and retractor system |
| CN113693686A (zh) * | 2021-08-17 | 2021-11-26 | 中山大学 | 照明光源复合吸除功能的鼻中隔手术切开刀 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3888117A (en) * | 1973-07-16 | 1975-06-10 | Minnesota Mining & Mfg | Pressure sensor and instrument utilizing same |
| US4784150A (en) * | 1986-11-04 | 1988-11-15 | Research Corporation | Surgical retractor and blood flow monitor |
| US4945896A (en) | 1989-01-24 | 1990-08-07 | Gade George F | Surgical retractor assembly having tissue viability sensor embedded therein |
| US5769781A (en) * | 1995-11-13 | 1998-06-23 | Chappuis; James L. | Protector retractor |
| US5928137A (en) * | 1996-05-03 | 1999-07-27 | Green; Philip S. | System and method for endoscopic imaging and endosurgery |
| JPH10277043A (ja) * | 1997-04-08 | 1998-10-20 | Okada Izai Kk | リトラクター |
| US6139489A (en) * | 1999-10-05 | 2000-10-31 | Ethicon Endo-Surgery, Inc. | Surgical device with integrally mounted image sensor |
| US7166073B2 (en) | 2000-09-29 | 2007-01-23 | Stephen Ritland | Method and device for microsurgical intermuscular spinal surgery |
| JP4295086B2 (ja) | 2001-07-11 | 2009-07-15 | ヌバシブ, インコーポレイテッド | 手術の間の神経近接度、神経の方向、および病理学を決定するシステムおよび方法 |
| US20050113654A1 (en) * | 2001-08-27 | 2005-05-26 | Weber Paul J. | Body function monitoring mouth guard |
| US6730021B2 (en) * | 2001-11-07 | 2004-05-04 | Computer Motion, Inc. | Tissue spreader with force measurement, force indication or force limitation |
| US8328420B2 (en) * | 2003-04-22 | 2012-12-11 | Marcio Marc Abreu | Apparatus and method for measuring biologic parameters |
| ES2377483T3 (es) * | 2002-04-25 | 2012-03-28 | Tyco Healthcare Group Lp | Instrumentos quirúrgicos que incluyen sistemas microelectromecánicos (MEMS) |
| US8137284B2 (en) * | 2002-10-08 | 2012-03-20 | Nuvasive, Inc. | Surgical access system and related methods |
| US20070066872A1 (en) * | 2003-03-07 | 2007-03-22 | Paul Morrison | IIIuminable retractor |
| US7090637B2 (en) * | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US7909848B2 (en) * | 2003-06-27 | 2011-03-22 | Depuy Spine, Inc. | Tissue retractor and guide device |
| US7481766B2 (en) * | 2003-08-14 | 2009-01-27 | Synthes (U.S.A.) | Multiple-blade retractor |
| US20050131457A1 (en) * | 2003-12-15 | 2005-06-16 | Ethicon, Inc. | Variable stiffness shaft |
| AU2004303424C1 (en) * | 2003-12-18 | 2009-11-05 | Depuy Spine, Inc. | Surgical retractor systems, illuminated cannulae, and methods of use |
| US8684577B2 (en) * | 2005-05-13 | 2014-04-01 | Invuity, Inc. | Body cavity illumination system |
| US8105236B2 (en) | 2005-07-11 | 2012-01-31 | Kyphon Sarl | Surgical access device, system, and methods of use |
| US8911364B2 (en) | 2005-09-08 | 2014-12-16 | DePuy Synthes Products, LLC | Spine retractor and distractor device |
| US20070129634A1 (en) * | 2005-10-17 | 2007-06-07 | Hickey Katherine M | Biomedical positioning and stabilization system |
| US8409088B2 (en) * | 2006-01-18 | 2013-04-02 | Invuity, Inc. | Retractor illumination system |
| ZA200808411B (en) | 2006-04-11 | 2009-12-30 | Synthes Gmbh | Minimally invasive fixation system |
| US8478377B2 (en) * | 2006-10-04 | 2013-07-02 | Dexcom, Inc. | Analyte sensor |
| US8202216B2 (en) | 2007-03-08 | 2012-06-19 | Warsaw Orthopedic, Inc. | Tissue retractor |
| US9380966B2 (en) * | 2007-06-22 | 2016-07-05 | Vioptix, Inc. | Tissue retractor oximeter |
| US20090163943A1 (en) * | 2007-12-20 | 2009-06-25 | Cavanaugh Brian J | Multi-purpose tool for minor surgery |
| US8864654B2 (en) * | 2010-04-20 | 2014-10-21 | Jeffrey B. Kleiner | Method and apparatus for performing retro peritoneal dissection |
| US20110144687A1 (en) * | 2009-12-10 | 2011-06-16 | Kleiner Jeffrey | Lateral Based Retractor System |
| US8382666B1 (en) | 2009-06-03 | 2013-02-26 | Vioptix, Inc. | Medical device probe connector |
| JP5814243B2 (ja) * | 2009-09-25 | 2015-11-17 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 組織を接近させるデバイス |
| US20110077466A1 (en) * | 2009-09-25 | 2011-03-31 | Spectrum Health Innovations, LLC | Laryngoscope guide and related method of use |
| US8926626B2 (en) * | 2009-11-10 | 2015-01-06 | Wake Forest University Health Sciences | Tissue tensioning devices and related methods |
| US8376937B2 (en) * | 2010-01-28 | 2013-02-19 | Warsaw Orhtopedic, Inc. | Tissue monitoring surgical retractor system |
| US9307971B2 (en) * | 2010-02-01 | 2016-04-12 | Warsaw Orthopedic, Inc. | Surgical retractor instrument systems and methods of using the same |
| US8974380B2 (en) * | 2010-02-24 | 2015-03-10 | Meni-Med Ltd | Surgical retractor |
| US20120059226A1 (en) * | 2010-09-01 | 2012-03-08 | Funt David K | Surgical retractors with illumination |
| EP2618743B1 (en) * | 2010-09-20 | 2018-03-07 | Synthes GmbH | Spinal access retractor |
| US9011323B2 (en) | 2010-10-08 | 2015-04-21 | Invuity, Inc. | Method and apparatus for soft tissue retraction |
| US9480855B2 (en) * | 2012-09-26 | 2016-11-01 | DePuy Synthes Products, Inc. | NIR/red light for lateral neuroprotection |
| US20140277323A1 (en) * | 2013-03-15 | 2014-09-18 | Oraltone Llc | Oral neural stimulator |
| US9125587B2 (en) * | 2013-03-15 | 2015-09-08 | DePuy Synthes Products, Inc. | Surgical retractors |
| JP6438460B2 (ja) * | 2013-05-17 | 2018-12-12 | アヴァンティス メディカル システムズ, インコーポレイテッド | 二次撮像内視鏡デバイス |
-
2013
- 2013-03-15 US US13/832,727 patent/US9125587B2/en active Active
-
2014
- 2014-02-27 JP JP2016500461A patent/JP6516129B2/ja active Active
- 2014-02-27 WO PCT/US2014/018988 patent/WO2014149493A1/en active Application Filing
- 2014-02-27 CN CN201480015687.4A patent/CN105142538A/zh active Pending
- 2014-02-27 EP EP14713630.3A patent/EP3003165B1/en active Active
- 2014-02-27 AU AU2014238121A patent/AU2014238121B2/en active Active
-
2015
- 2015-07-13 US US14/797,717 patent/US10398299B2/en active Active
-
2019
- 2019-04-02 JP JP2019070372A patent/JP6911071B2/ja active Active
- 2019-07-19 US US16/517,536 patent/US11395584B2/en active Active
-
2022
- 2022-06-27 US US17/850,967 patent/US20220322928A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20150313456A1 (en) | 2015-11-05 |
| US20220322928A1 (en) | 2022-10-13 |
| AU2014238121B2 (en) | 2018-11-01 |
| US11395584B2 (en) | 2022-07-26 |
| US9125587B2 (en) | 2015-09-08 |
| US20140275792A1 (en) | 2014-09-18 |
| US10398299B2 (en) | 2019-09-03 |
| US20190335990A1 (en) | 2019-11-07 |
| EP3003165B1 (en) | 2018-06-06 |
| JP6911071B2 (ja) | 2021-07-28 |
| AU2014238121A1 (en) | 2015-10-29 |
| JP2016521997A (ja) | 2016-07-28 |
| JP2019162431A (ja) | 2019-09-26 |
| WO2014149493A1 (en) | 2014-09-25 |
| CN105142538A (zh) | 2015-12-09 |
| EP3003165A1 (en) | 2016-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6516129B2 (ja) | 外科的開創器 | |
| KR101752827B1 (ko) | 전기 외과용 핸드피스 | |
| KR20180030849A (ko) | 개복 수술을 보조하는 장치 및 키트 | |
| EP2323564B1 (en) | Modular tool with signal feedback | |
| US20190314107A1 (en) | Protection Measures for Robotic Electrosurgical Instruments | |
| US9681813B2 (en) | Neurophysiological stimulation system and methods with wireless communication | |
| US20110028860A1 (en) | Neuromonitoring system with wireless instrumentation | |
| US20150342521A1 (en) | Surgical apparatus and system | |
| JP2018501825A (ja) | 近くをモニターする、光源の付いた内視鏡的椎弓根プローブ(深針) | |
| US20150359585A1 (en) | Apparatus, systems, and methods for dissection and modification of tissues | |
| EP3013271B1 (en) | Apparatus for dissection and modification of tissues | |
| EP3413785A1 (en) | System and method for electrical coupling of a surgical system or part thereof | |
| US20130345549A1 (en) | Wireless catheter with base wireless transceiver | |
| US20160367311A1 (en) | Instrumentation with Embedded Imaging Systems | |
| EP3349639A1 (en) | Illuminated endoscopic pedicle probe with dynamic real time monitoring for proximity to nerves | |
| US7875027B2 (en) | Autoclaveable handle with stripping mechanism to attach a disposable connecting cable | |
| US20170238788A1 (en) | Illuminated Endoscopic Pedicle Probe With Dynamic Real Time Monitoring For Proximity To Nerves | |
| US20210252257A1 (en) | Medical device comprising a smart handle for improving handling of an elongated functional system | |
| US11213341B2 (en) | Bovie adapter for rotational control and fixation | |
| US20160367314A1 (en) | Bendable and rebendable endoscopic electrosurgical device | |
| JP2020509833A (ja) | 食道歪み装置 | |
| US20220265340A1 (en) | Electrosurgical handheld device, and contact body for an electrosurgical handheld device | |
| KR101601678B1 (ko) | 인체 수술용 위치 표시 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190328 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190328 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6516129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |