JP6514239B2 - 機械診断装置および機械診断方法 - Google Patents
機械診断装置および機械診断方法 Download PDFInfo
- Publication number
- JP6514239B2 JP6514239B2 JP2016570237A JP2016570237A JP6514239B2 JP 6514239 B2 JP6514239 B2 JP 6514239B2 JP 2016570237 A JP2016570237 A JP 2016570237A JP 2016570237 A JP2016570237 A JP 2016570237A JP 6514239 B2 JP6514239 B2 JP 6514239B2
- Authority
- JP
- Japan
- Prior art keywords
- operation mode
- data
- machine
- abnormality
- measurement data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0208—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the configuration of the monitoring system
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0218—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults
- G05B23/0224—Process history based detection method, e.g. whereby history implies the availability of large amounts of data
- G05B23/0227—Qualitative history assessment, whereby the type of data acted upon, e.g. waveforms, images or patterns, is not relevant, e.g. rule based assessment; if-then decisions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/34—Testing dynamo-electric machines
- G01R31/343—Testing dynamo-electric machines in operation
Description
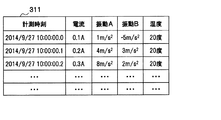
センサデータ取得部21(図2参照)は、機械1に取り付けられたセンサ11に有線または無線の通信システム(図示省略)を介して接続されている。そして、センサ11によって計測され、センサ11から供給される電流、温度、加速度などの計測データを受け取り、センサデータ記憶部31に格納する。
図4は、運転モードデータ記憶部32に記憶される運転モードデータ321の構成の例を示した図である。図4に示すように、運転モードデータ321は、「運転モード名称」、「時間」、「振幅」、「周波数」、「運転モードID」などの項目のデータによって構成される。ここで、「運転モード名称」は、機械1の運転時に現れる運転モードを識別する名称、「時間」は、当該運転モードの特定に必要な継続時間、「センサ」は、当該運転モードの特定に用いられる計測データの名称、「振幅」は、当該計測データの振幅値または振幅値の変化量、「周波数」は、当該計測データの周波数または周波数の変化量、「運転モードID」は、当該運転モードを識別する番号または記号である。
異常診断部23(図2参照)は、運転モード特定部22から運転モードIDを受け取ると機械1の異常診断を行う。以下、図9〜図13の図面を参照しつつ、異常診断部23が行う異常診断の詳細について説明する。
従って、本実施形態では、ユーザは、診断処理で異常が検知された場合、周波数分析結果表示画面80を表示させることにより、異常データが基準データと相違する周波数帯域の状況などを速やかに確認することができる。
2 機械診断装置
3 保守員
4 管理者
11 センサ
21 センサデータ取得部
22 運転モード特定部
23 異常診断部
24 運転モードデータ作成部
25 ユーザIF部
31 センサデータ記憶部
32 運転モードデータ記憶部
33 異常モードデータ記憶部
34 診断手順情報記憶部
41 入力装置
42 表示装置
50 運転モード定義画面
60 診断結果表示画面
70 計測データ詳細表示画面
80 周波数分析結果表示画面
Claims (8)
- 1つ以上の運転モードを有する機械に取り付けられたセンサによって計測される計測データに基づき前記機械の異常を診断する機械診断装置であって、
前記機械の異常の部位および態様を表す異常モードと、前記機械の異常モードが発生し得る前記機械の運転モードと、前記機械の異常モードの診断に用いられる診断手順情報と、を予め対応付けて記憶した異常診断情報記憶部と、
前記センサから、そのセンサによって計測される時系列の計測データを取得するセンサデータ取得部と、
前記センサデータ取得部を介して過去に取得された少なくとも1つの前記時系列の計測データのうち、ユーザによって指定された範囲における振幅、周波数、前記振幅の変化量および前記周波数の変化量に基づき、前記機械の運転モードを定義する運転モードデータを作成し、記憶装置に格納する運転モードデータ作成部と、
前記センサデータ取得部を介して前記時系列の計測データを取得したときには、その計測データの振幅および周波数の時系列データを、前記記憶装置に格納されている前記運転モードデータと比較することにより、前記機械の運転モードを特定する運転モード特定部と、
前記異常診断情報記憶部を参照して、前記運転モード特定部で特定される運転モードに対応付けられている前記機械の全ての異常モードを求め、前記求めた全ての異常モードのそれぞれに対応付けられている前記診断手順情報を全て求め、前記求めた全ての診断手順情報に従って、前記センサデータ取得部を介して取得される前記時系列の計測データを処理し、前記機械の異常モードの発生の有無を診断する異常診断部と、
を備えること
を特徴とする機械診断装置。 - 前記運転モードデータ作成部は、
前記運転モードデータを作成するときには、前記センサデータ取得部を介して過去に取得された前記時系列の計測データの振幅および周波数の時系列データを表示装置に表示するとともに、前記表示された振幅および周波数の時系列データに基づいてユーザが入力する、それぞれの運転モードを切り出す区分情報を読み込み、その読み込んだ区分情報で指定される時間区間の情報と、その時間区間に含まれる前記計測データの振幅および周波数の時系列データと、を用いて前記運転モードデータを作成すること
を特徴とする請求項1に記載の機械診断装置。 - 前記異常診断部は、
前記機械の異常を検出したときには、その異常モードとその異常が検出された時点で前記運転モード特定部によって特定された前記機械の運転モードとを含んで構成された診断結果データを表示装置に表示すること
を特徴とする請求項1に記載の機械診断装置。 - 前記異常診断部は、
前記表示装置に表示した1つ以上の診断結果データのうち1つの診断結果データを選択する入力を受け付けた場合には、前記異常が検出された時点を含む時間範囲について、前記センサデータ取得部で取得された前記時系列の計測データまたはその周波数分析結果をさらに表示すること
を特徴とする請求項3に記載の機械診断装置。 - 1つ以上の運転モードを有する機械に取り付けられたセンサに接続され、前記センサによって計測される計測データに基づき前記機械の異常を診断するコンピュータが実行する機械診断方法であって、
前記コンピュータは、
前記機械の異常の部位および態様を表す異常モードと、前記機械の異常モードが発生し得る前記機械の運転モードと、前記機械の異常モードの診断に用いられる診断手順情報と、を予め対応付けて記憶した異常診断情報記憶部を備え、
前記センサから、そのセンサによって計測される時系列の計測データを取得するセンサデータ取得処理と、
前記センサデータ取得処理を介して過去に取得された少なくとも1つの前記時系列の計測データのうち、ユーザによって指定された範囲における振幅、周波数、前記振幅の変化量および前記周波数の変化量に基づき、前記機械の運転モードを定義する運転モードデータを作成し、記憶装置に格納する運転モードデータ作成処理と、
前記センサデータ取得処理を介して前記時系列の計測データを取得したときには、その計測データの振幅および周波数の時系列データを、前記記憶装置に格納されている前記運転モードデータと比較することにより、前記機械の運転モードを特定する運転モード特定処理と、
前記異常診断情報記憶部を参照して、前記運転モード特定処理で特定される運転モードに対応付けられている前記機械の全ての異常モードを求め、前記求めた全ての異常モードのそれぞれに対応付けられている前記診断手順情報を全て求め、前記求めた全ての診断手順情報に従って、前記センサデータ取得処理を介して取得される前記時系列の計測データを処理し、前記機械の異常モードの発生の有無を診断する異常診断処理と、
を実行すること
を特徴とする機械診断方法。 - 前記コンピュータは、
前記運転モードデータ作成処理において、前記運転モードデータを作成するときには、前記センサデータ取得処理を介して過去に取得された前記時系列の計測データの振幅および周波数の時系列データを表示装置に表示するとともに、前記表示された振幅および周波数の時系列データに基づいてユーザが入力する、それぞれの運転モードを切り出す区分情報を読み込み、その読み込んだ区分情報で指定される時間区間の情報と、その時間区間に含まれる前記計測データの振幅および周波数の時系列データと、を用いて前記運転モードデータを作成すること
を特徴とする請求項5に記載の機械診断方法。 - 前記コンピュータは、
前記異常診断処理において、前記機械の異常を検出したときには、その異常モードとその異常が検出された時点で前記運転モード特定処理によって特定された前記機械の運転モードとを含んで構成された診断結果データを表示装置に表示すること
を特徴とする請求項5に記載の機械診断方法。 - 前記コンピュータは、
前記異常診断処理において、前記表示装置に表示した1つ以上の診断結果データのうち1つの診断結果データを選択する入力を受け付けた場合には、前記異常が検出された時点を含む時間範囲について、前記センサデータ取得処理で取得された前記時系列の計測データまたはその周波数分析結果をさらに表示すること
を特徴とする請求項7に記載の機械診断方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/051341 WO2016117021A1 (ja) | 2015-01-20 | 2015-01-20 | 機械診断装置および機械診断方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016117021A1 JPWO2016117021A1 (ja) | 2017-07-13 |
| JP6514239B2 true JP6514239B2 (ja) | 2019-05-15 |
Family
ID=56416587
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016570237A Active JP6514239B2 (ja) | 2015-01-20 | 2015-01-20 | 機械診断装置および機械診断方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10295995B2 (ja) |
| JP (1) | JP6514239B2 (ja) |
| WO (1) | WO2016117021A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10287909B2 (en) * | 2015-05-29 | 2019-05-14 | Pratt & Whitney Canada Corp. | Method and kit for preserving a fuel system of an aircraft engine |
| JP5875726B1 (ja) * | 2015-06-22 | 2016-03-02 | 株式会社日立パワーソリューションズ | 異常予兆診断装置のプリプロセッサ及びその処理方法 |
| WO2017116627A1 (en) * | 2016-01-03 | 2017-07-06 | Presenso, Ltd. | System and method for unsupervised prediction of machine failures |
| JP6485428B2 (ja) * | 2016-10-06 | 2019-03-20 | 住友電気工業株式会社 | 管理システム、管理装置、管理方法および管理プログラム |
| CN106444631B (zh) * | 2016-11-29 | 2019-02-19 | 重庆大学 | 基于本体的智能机床运行状态信息采集平台及方法 |
| JP6837893B2 (ja) | 2017-03-31 | 2021-03-03 | 住友重機械工業株式会社 | 故障診断システム |
| CN112368683B (zh) * | 2018-07-03 | 2024-03-26 | 三菱电机株式会社 | 数据处理装置以及数据处理方法 |
| JP2019096348A (ja) * | 2019-02-20 | 2019-06-20 | 住友電気工業株式会社 | 管理システム、管理装置、管理方法および管理プログラム |
| JP7303473B2 (ja) * | 2020-03-09 | 2023-07-05 | 富士通株式会社 | 処理選択プログラム、処理選択システム、および処理選択方法 |
| JP7328930B2 (ja) * | 2020-05-11 | 2023-08-17 | 株式会社日立製作所 | センサ装置、データ取得方法および電流監視システム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5739698A (en) * | 1996-06-20 | 1998-04-14 | Csi Technology, Inc. | Machine fault detection using slot pass frequency flux measurements |
| JP2000259222A (ja) * | 1999-03-04 | 2000-09-22 | Hitachi Ltd | 機器監視・予防保全システム |
| JP2002182736A (ja) | 2000-12-12 | 2002-06-26 | Yamatake Sangyo Systems Co Ltd | 設備診断装置および設備診断プログラム記憶媒体 |
| JP4182399B2 (ja) | 2002-08-01 | 2008-11-19 | シムックス株式会社 | 工作機械の稼働情報収集システム |
| JP2004227357A (ja) * | 2003-01-24 | 2004-08-12 | Hitachi Industries Co Ltd | 設備の劣化診断方法と劣化診断装置 |
| JP4032045B2 (ja) * | 2004-08-13 | 2008-01-16 | 新キャタピラー三菱株式会社 | データ処理方法及びデータ処理装置、並びに診断方法及び診断装置 |
| JP5337853B2 (ja) * | 2011-09-12 | 2013-11-06 | 株式会社日立製作所 | 発電プラントの診断装置、及び発電プラントの診断方法 |
| US9395270B2 (en) * | 2012-10-19 | 2016-07-19 | Florida Power & Light Company | Method and system for monitoring rotor blades in combustion turbine engine |
| JP5530045B1 (ja) * | 2014-02-10 | 2014-06-25 | 株式会社日立パワーソリューションズ | ヘルスマネージメントシステム及びヘルスマネージメント方法 |
| GB201409590D0 (en) * | 2014-05-30 | 2014-07-16 | Rolls Royce Plc | Asset condition monitoring |
| JP6378419B2 (ja) * | 2015-03-12 | 2018-08-22 | 株式会社日立製作所 | 機械診断装置および機械診断方法 |
| US10464408B2 (en) * | 2017-06-08 | 2019-11-05 | Ford Global Technologies, Llc | System and methods for active engine mount diagnostics |
-
2015
- 2015-01-20 WO PCT/JP2015/051341 patent/WO2016117021A1/ja active Application Filing
- 2015-01-20 US US15/544,298 patent/US10295995B2/en active Active
- 2015-01-20 JP JP2016570237A patent/JP6514239B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016117021A1 (ja) | 2017-07-13 |
| US20180011480A1 (en) | 2018-01-11 |
| WO2016117021A1 (ja) | 2016-07-28 |
| US10295995B2 (en) | 2019-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6514239B2 (ja) | 機械診断装置および機械診断方法 | |
| JP6378419B2 (ja) | 機械診断装置および機械診断方法 | |
| US20240068864A1 (en) | Systems and methods for monitoring of mechanical and electrical machines | |
| EP2570879B1 (en) | Condition monitoring system and method | |
| US6789025B2 (en) | Cyclic time averaging for machine monitoring | |
| JP5260343B2 (ja) | プラント運転状態監視方法 | |
| US10670016B2 (en) | Pump monitoring apparatus and method | |
| JP4832609B1 (ja) | 異常予兆診断装置および異常予兆診断方法 | |
| US8720275B2 (en) | Detecting rotor anomalies | |
| JP2019045942A (ja) | 故障診断システム | |
| JP2019160250A (ja) | 情報処理装置、情報処理方法、プログラム、および機械装置 | |
| JP6714498B2 (ja) | 設備診断装置及び設備診断方法 | |
| JP2013137797A (ja) | プラント運転状態監視方法 | |
| US10908014B2 (en) | Detecting rotor anomalies during transient speed operations | |
| EP3819608A1 (en) | Detecting rotor anomalies by determining vibration trends during transient speed operation | |
| JPWO2020129818A1 (ja) | 機械設備診断システム、機械設備診断方法、および機械設備診断プログラム | |
| JP6946409B2 (ja) | 水処理設備の監視システム | |
| JP2013101718A (ja) | プラント運転状態監視方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6514239 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |