JP6487302B2 - 位置測定装置のエラーを補正する方法 - Google Patents
位置測定装置のエラーを補正する方法 Download PDFInfo
- Publication number
- JP6487302B2 JP6487302B2 JP2015184244A JP2015184244A JP6487302B2 JP 6487302 B2 JP6487302 B2 JP 6487302B2 JP 2015184244 A JP2015184244 A JP 2015184244A JP 2015184244 A JP2015184244 A JP 2015184244A JP 6487302 B2 JP6487302 B2 JP 6487302B2
- Authority
- JP
- Japan
- Prior art keywords
- correction
- value
- correction value
- stored
- group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 72
- 238000012937 correction Methods 0.000 claims description 470
- 238000005259 measurement Methods 0.000 claims description 54
- 238000012545 processing Methods 0.000 claims description 35
- 239000003550 marker Substances 0.000 claims description 10
- 238000007906 compression Methods 0.000 claims description 6
- 230000006835 compression Effects 0.000 claims description 6
- 238000012795 verification Methods 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000013144 data compression Methods 0.000 description 2
- 230000001965 increasing effect Effects 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
- G01D18/008—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00 with calibration coefficients stored in memory
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
基準器で使用可能な補正点の一部についてのみ、それぞれ対応する補正値が選択され、部分補正表に保存され、
照合表に照合情報が保存され、この照合情報によって、部分補正表に保存された補正値と補正点との照合が行われる。
基準器における局所的に隣接する補正点の複数のグループを形成し、これらのグループにそれぞれ較正により補正値が設けられており、
グループ毎に、局所的なグループ補正値を決定し、これらのグループ補正値をグループ補正値表に保存し、
較正により得られたそれぞれのグループの補正値が、それぞれ対応するグループ補正値によって相殺され、この場合にデータワード幅が減じられた相殺補正値が形成され、相殺補正値表に保存され、
測定モードで、相殺補正値表およびグループ補正値表によって、検出された位置値が補正されることも同様に可能である。
基準器における少なくとも1つの極限値補正点が検出され、極限値補正点に対応する補正値が、隣接する補正点の補正値とは所定量だけ異なり、
極限値補正点のための相殺補正値表に、補正値の代わりに補助値が保存され、
極限値補正点との照合情報が、極限値補正点の補正値と共に極限値補正表に保存され、照合情報によって、測定モードで、保存された補正値と極限値補正点との照合が行われるように構成してもよい。
S(x,y)=スタートアドレス+m−n+x (方程式1)
となり、
S(x,y)は、座標x,yの点に最も近い基準器の補正点に対する部分補正表における補正値のメモリ箇所であり、
スタートアドレス:メモリユニットにおいて部分補正表の保存が開始されるメモリ箇所
m:照合表の四捨五入したy座標値に対するオフセット値
n:照合表の四捨五入したy座標値に対するスタートインデックス値
x:それぞれの点の四捨五入したx座標値
である。
S(x=5.4mm;y=4.2mm)=1000+7−3+5=1009
信号補正ユニット42は、測定モードでメモリユニット43の部分補正表43.1のこのメモリ箇所に保存された補正値KWにアクセスし、この補正値KWを用いて、検出された位置値を相殺もしくは補正する。
S(x,y)=スタートアドレス+O+x (方程式2)
となり、
S(x,y)は、座標x,yの点に最も近い基準器の補正点に対する部分補正表における補正値のメモリ箇所であり、
スタートアドレス:メモリユニットにおいて部分補正表の保存が開始されるメモリ箇所
O:照合表の四捨五入したy座標値に対する照合情報
x:それぞれの点の四捨五入したx座標値
である。したがって、本発明による方法のこの実施形態において部分補正表と並んで設けられる照合表が具体的に構成され得る様々な可能性がある。
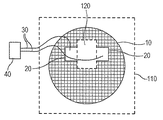
20 走査ユニット
43 メモリユニット
43.1 部分補正表
43.2 照合表
143.1 グループ補正値表
143.2 相殺補正値表
143.3 極限値補正表
G1〜G4 グループ
G_KW グループ補正値
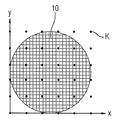
K,K′,W 補正点
KW 補正値
M マーカー値
S メモリ箇所
V_KW 相殺補正値
Claims (9)
- 少なくとも1つの走査ユニット(20)により走査される基準器(10)を備える位置測定装置のエラーを補正する方法であって、基準器(10)の所定数の補正点(K′)についてそれぞれ補正値(KW)が準備され、該補正値が、測定開始前に行われる較正により得られ、測定モードで、検出された位置値を補正するために用いられる方法において、
較正時に得られた補正値(KW)を測定モードのために圧縮し、
較正によって得られる前記補正値(KW)を圧縮するために、
基準器(10)で使用可能な補正点(K′)の一部についてのみ、それぞれ対応する前記補正値(KW)を選択し、部分補正表(43.1)に保存し、
照合表(43.2)に照合情報を保存し、該照合情報によって、測定モードで、前記部分補正表(43.1)に保存された前記補正値(KW)と前記補正点(K′)との照合を行い、
測定モードで走査ユニット(20)によって走査される前記基準器(10)の部分領域に位置する基準器(10)の前記補正点(K′)についてのみ前記補正値(KW)を選択し、部分補正表(43.1)に保存し、
前記部分補正表(43.1)および前記照合表(43.2)をメモリユニット(43)に保存し、測定モードで信号補正ユニット(42)が前記メモリユニット(43)にアクセスし、検出された位置測定値を補正し、さらなる処理のために準備し、
前記照合表(43.2)に保存された照合情報によって、選択された補正点(K′)の補正値(KW)が保存された前記メモリユニット(43)のメモリ箇所(S)をそれぞれ示し、
測定モードで、前記基準器(10)の所定の位置との照合規則によって、前記部分補正表(43.1)における隣接する、または周辺の少なくとも1つの補正点(K′)の補正値(KW)のメモリ箇所(S)を決定することを特徴とする方法。 - 請求項1に記載の方法において、
前記基準器(10)の部分領域が長方形ではない外形を備えるか、または前記基準器(10)が長方形ではない外形を備える方法。 - 少なくとも1つの走査ユニット(20)により走査される基準器(10)を備える位置測定装置のエラーを補正する方法であって、基準器(10)の所定数の補正点(K′)についてそれぞれ補正値(KW)が準備され、該補正値が、測定開始前に行われる較正により得られ、測定モードで、検出された位置値を補正するために用いられる方法において、
較正時に得られた補正値(KW)を測定モードのために圧縮し、
圧縮のために前記補正値(KW)のデータワード幅を減じ、
前記基準器(10)における局所的に隣接する補正点(K)の複数のグループ(G1〜G4)を形成し、該グループにそれぞれ較正により前記補正値(KW)を設け、
前記グループ(G1〜G4)毎に、局所的なグループ補正値(G_KW)を決定し、該グループ補正値(G_KW)をグループ補正値表(143.1)に保存し、
較正により得られたそれぞれのグループ(G1〜G4)の前記補正値(KW)を、それぞれ対応する前記グループ補正値(G_KW)によって相殺し、データワード幅が減じられた相殺補正値(V_KW)を計算して相殺補正値表(143.2)に保存し、
測定モードで、前記相殺補正値表(143.2)および前記グループ補正値表(143.1)によって、検出された位置値を補正する方法。 - 請求項3に記載の方法において、
前記グループ補正値(G_KW)として、前記グループ(G1〜G4)の最小補正値(KW)、前記グループ(G1〜G4)の平均補正値、または前記グループ(G1〜G4)の前記補正値(KW)の最大値と最小値との中間値を決定する方法。 - 請求項3に記載の方法において、
前記補正値(KW)をそれぞれ対応するグループ補正値(G_KW)によって相殺するために差を求める方法。 - 請求項3に記載の方法において、
さらに、
基準器(10)における少なくとも1つの極限値補正点を検出し、該極限値補正点に対応する前記補正値(KW)が、隣接する補正点(K)の補正値(KW)とは所定量だけ異なり、
前記極限値補正点のための相殺補正値表(143.2)に、補正値(KW)の代わりに補助値を保存し、
前記極限値補正点の前記補正値(KW)と共に極限値補正点との照合情報を極限値補正表(143.3)に保存し、照合情報によって、測定モードで、保存された前記補正値(KW)と前記極限値補正点との照合を行う方法。 - 請求項6に記載の方法において、
補助値として、他のいずれの補正値(KW)とも一致しないマーカー値(M)を相殺補正値表(143.2)に保存する方法。 - 請求項6に記載の方法において、
極限値補正点のための補正値として、較正により得られた補正値(KW)または極限値‐相殺補正値を極限値補正表(143.3)に保存する方法。 - 2次元の基準器を備える位置測定装置において、
前記基準器が請求項1から8までのいずれか一項に記載の方法を実施するように構成されていることを特徴とする位置測定装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014219188.2 | 2014-09-23 | ||
| DE102014219188.2A DE102014219188A1 (de) | 2014-09-23 | 2014-09-23 | Verfahren zur Fehlerkorrektur in Positionsmesseinrichtungen |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016070930A JP2016070930A (ja) | 2016-05-09 |
| JP2016070930A5 JP2016070930A5 (ja) | 2018-11-01 |
| JP6487302B2 true JP6487302B2 (ja) | 2019-03-20 |
Family
ID=54072722
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015184244A Active JP6487302B2 (ja) | 2014-09-23 | 2015-09-17 | 位置測定装置のエラーを補正する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10060772B2 (ja) |
| EP (1) | EP3001151B1 (ja) |
| JP (1) | JP6487302B2 (ja) |
| CN (1) | CN105444708B (ja) |
| DE (1) | DE102014219188A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016222275A1 (de) * | 2016-11-14 | 2018-05-17 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Verfahren zum Betreiben einer Positionsmesseinrichtung |
| CN108038331B (zh) * | 2017-12-27 | 2022-11-11 | 重庆工商职业学院 | 一种基于云计算的高精度温度数据校正方法 |
| CN112697186B (zh) * | 2019-10-23 | 2022-03-25 | 上海微电子装备(集团)股份有限公司 | 测量校正装置和测量校正方法 |
| US12078517B2 (en) * | 2020-11-20 | 2024-09-03 | Panasonic Intellectual Property Management Co., Ltd. | Encoder including moving plate, irradiator, light receiver and determination part to specify error position |
| DE102021121869A1 (de) | 2021-08-24 | 2023-03-02 | Schaeffler Technologies AG & Co. KG | Verfahren zur Kalibrierung und/oder Linearisierung eines Positionssensors; Positionssensor; Hinterachslenkung; Fahrzeug; Computerprogramm |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3024716C2 (de) * | 1980-06-30 | 1986-10-23 | Dr. Johannes Heidenhain Gmbh, 8225 Traunreut | Digitales Längen- oder Winkelmeßsystem |
| DE58904087D1 (de) * | 1989-07-21 | 1993-05-19 | Heidenhain Gmbh Dr Johannes | Verfahren zum interpolieren von positionsmesssignalen. |
| JPH08201110A (ja) * | 1995-01-30 | 1996-08-09 | Sony Magnescale Inc | 内挿装置 |
| US6606510B2 (en) * | 2000-08-31 | 2003-08-12 | Mallinckrodt Inc. | Oximeter sensor with digital memory encoding patient data |
| DE10244650A1 (de) * | 2002-09-25 | 2004-04-08 | Siemens Ag | Kalibriersystem, insbesondere für ein Schwingungsmesssystem |
| DE10359415A1 (de) | 2003-12-16 | 2005-07-14 | Trimble Jena Gmbh | Verfahren zur Kalibrierung eines Vermessungsgeräts |
| CN1947062A (zh) | 2004-02-23 | 2007-04-11 | Asml荷兰有限公司 | 基于散射测量数据确定工艺参数值的方法 |
| DE102005043569A1 (de) * | 2005-09-12 | 2007-03-22 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| US7619207B2 (en) | 2006-11-08 | 2009-11-17 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| ES2769304T3 (es) | 2012-04-05 | 2020-06-25 | Fidia Spa | Dispositivo para corrección de errores para máquinas CNC |
| CN103591913B (zh) | 2013-11-18 | 2016-01-13 | 沈阳黎明航空发动机(集团)有限责任公司 | 一种五坐标测量机综合误差校准方法 |
-
2014
- 2014-09-23 DE DE102014219188.2A patent/DE102014219188A1/de not_active Withdrawn
-
2015
- 2015-09-09 EP EP15184368.7A patent/EP3001151B1/de active Active
- 2015-09-14 US US14/852,650 patent/US10060772B2/en active Active
- 2015-09-17 JP JP2015184244A patent/JP6487302B2/ja active Active
- 2015-09-23 CN CN201510614273.XA patent/CN105444708B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3001151B1 (de) | 2017-06-14 |
| US20160084685A1 (en) | 2016-03-24 |
| JP2016070930A (ja) | 2016-05-09 |
| US10060772B2 (en) | 2018-08-28 |
| DE102014219188A1 (de) | 2016-03-24 |
| EP3001151A1 (de) | 2016-03-30 |
| CN105444708A (zh) | 2016-03-30 |
| CN105444708B (zh) | 2018-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6487302B2 (ja) | 位置測定装置のエラーを補正する方法 | |
| US7965325B2 (en) | Distortion-corrected image generation unit and distortion-corrected image generation method | |
| JP4825598B2 (ja) | 画像測定装置の校正方法 | |
| US8290733B2 (en) | Modular calibration | |
| WO2018012199A1 (ja) | 基板計測装置およびレーザ加工システム | |
| US4972311A (en) | X-Y table error mapping apparatus and method | |
| US5993043A (en) | Lithography processing apparatus for manufacturing semiconductor devices | |
| WO2018236653A1 (en) | HYBRID RECOVERY TARGET DESIGN FOR IMAGING-BASED RECOVERY AND DIFFUSIOMETRY-BASED RECOVERY | |
| US10821911B2 (en) | Method and system of camera focus for advanced driver assistance system (ADAS) | |
| JP5089166B2 (ja) | プローブカードアナライザにおける部品のたわみの影響を軽減する方法 | |
| JP3828552B2 (ja) | 寸法測定方法と寸法測定システム及び寸法測定プログラム | |
| JP5209012B2 (ja) | 位置合わせ測定方法及び位置合わせ測定装置 | |
| JP2016070930A5 (ja) | ||
| CN103869627B (zh) | 用于投影光刻机的调焦调平方法 | |
| CN110682285A (zh) | 机械手臂校正系统以及校正方法 | |
| EP2851648A1 (en) | Shape measurement method and shape measurement apparatus | |
| CN109883549B (zh) | 一种基于数字微镜的弯曲谱线校正方法 | |
| CN112810137B (zh) | 一种用于激光粉末床熔融设备扫描振镜校正方法和系统 | |
| JP6560159B2 (ja) | 位置計測装置 | |
| JP2015139126A (ja) | 補正式算出装置、補正式算出方法、検査装置、および検査方法 | |
| JP2575848B2 (ja) | 画像処理方法 | |
| JPH06225187A (ja) | 撮像装置 | |
| WO2023032962A1 (ja) | 直接描画装置及びその制御方法 | |
| US20020147557A1 (en) | Method of compensating for work piece distortions and machine errors | |
| JPS60138921A (ja) | パタ−ン形状検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180914 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180914 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180914 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181010 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6487302 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |